ГОСТ Р ИСО 10068-2015
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация и удар
ДАННЫЕ О ВХОДНОМ МЕХАНИЧЕСКОМ ИМПЕДАНСЕ СИСТЕМЫ "КИСТЬ - РУКА"
Mechanical vibration and shock. Data on the mechanical impedance of the human hand-arm system at the driving point
ОКС 17.160
Дата введения 2016-12-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 20 октября 2015 г. N 1579-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 10068:2012* "Вибрация и удар. Входной механический импеданс системы "кисть - рука" (ISO 10068:2012 "Mechanical vibration and shock - Mechanical impedance of the human hand-arm system at the driving point", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с требованиями ГОСТ Р 1.5 (пункт 3.5)
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Данные о входном механическом импедансе системы "кисть - рука" используют для описания биодинамических свойств этой системы в заданных условиях. От свойств системы "кисть - рука" в значительной степени зависит динамическое поведение инструмента, удерживаемого рукой оператора. Поэтому данные о входном механическом импедансе могут быть использованы в целях проектирования:
a) ручного инструмента или машин с ручным управлением с заданными свойствами;
b) устройств, защищающих руки оператора от повышенной вибрации;
c) испытательных стендов, имитирующих руку оператора при измерениях вибрации на рукоятках ручных машин.
Знание механического импеданса позволяет создать механический эквивалент (имитатор) системы "кисть - рука". Этот имитатор может быть применен при анализе вибрации инструмента, определении характеристик виброзащитных устройств, а также в качестве оборудования для испытаний ручных машин на вибрацию. Кроме того, он может быть использован для оценки биодинамических характеристик системы, таких как поглощаемая энергия вибрации и действующие силы в области контакта кисти руки с поверхностью вибрирующего инструмента.
Данные о входном механическом импедансе системы "кисть - рука" могут быть использованы для исследования механизмов заболеваний, связанных с регулярным воздействием локальной вибрации, а также вызываемых ею ощущений дискомфорта, для установления весовых частотных характеристик, позволяющих оценивать воздействие вибрации на организм человека.
Отклик системы "кисть - рука" на воздействие вибрации зависит не только от механических свойств руки/кисти, но также от условий контакта кисти с вибрирующей поверхностью. В первую очередь, на отклик влияют такие факторы, как:
- направление действия вибрации относительно системы "кисть - рука";
- геометрия обхватываемой вибрирующей поверхности;
- силы, с которыми кисть воздействует на поверхность;
- положение кисти и руки друг относительно друга;
- индивидуальные особенности оператора (свойства мягких тканей кисти руки, антропометрические характеристики системы "кисть - рука" и т.д.);
- амплитуда вибрации (поскольку отклик мягких тканей кисти руки на вибрацию может быть нелинейным).
Силы, действующие со стороны кисти, обычно разделяют на силу обхвата и тянущую/толкающую силу или силу подачи.
Данные, приведенные в стандарте, основаны на результатах экспериментов, выполненных разными исследователями с участием лиц мужского пола. Значительно меньше данных получено в исследованиях с участием лиц женского пола.
Независимые исследования, проведенные в номинально эквивалентных условиях, тем не менее, обнаруживают большой разброс в результатах. Это обусловило форму представления данных в настоящем стандарте. Прежде всего, определены наиболее вероятные значения модуля и фазы входных импедансов в зависимости от частоты. Для этих значений построен коридор, включающий в себя большую часть данных от разных исследователей. Границы коридора получены аппроксимацией кусочно-кубическими сплайнами и определяют область возможных значений входных механических импедансов для лиц мужского пола. В качестве характеристик возможных значений импедансов определены их средние значения и среднеквадратичные отклонения средних значений в зависимости от частоты. Эти характеристики могут быть использованы в различных приложениях, использующих данные настоящего стандарта.
1 Область применения
Настоящий стандарт устанавливает значения входного механического импеданса (модуля и фазы) системы "кисть - рука" для лиц мужского пола в трех ортогональных направлениях поступательного движения, соответствующих осям ,
и
базицентрической системы координат.
Примечание - Определение базицентрической системы координат дано в [2] и [5].
Составляющие входного механического импеданса вдоль осей ,
и
определены как функции частоты в диапазоне от 10 до 500 Гц для заданных положений кисти и руки друг относительно друга, заданных значений сил обхвата и подачи, диаметров обхватываемых рукояток, а также характеристик возбуждения. Составляющие импеданса в трех разных направлениях рассматриваются как независимые.
Настоящий стандарт может быть использован для определения типичных значений механического импеданса системы "кисть - рука" для лиц мужского пола в заданных условиях. При необходимости приведенные в нем данные могут быть также использованы в отношении лиц женского пола.
Опорные значения входного механического импеданса приведены как функции частоты при заданных значениях сил обхвата и подачи (см. приложение А).
Значения входного импеданса могут быть использованы для определения передаточных свойств упругих материалов при нагружении их системой "кисть - рука".
Математические модели системы "кисть - рука", соответствующие средним значениям эффективной массы или импеданса приведены в приложениях В-D.
Описание модели кисти руки в перчатке, а также частотнозависимого поглощения мощности вибрации системой "кисть - рука" приведено в приложениях Е и F.
Сведения об измерениях механического импеданса приведены в приложении G. Эта информация может быть использована для проведения дальнейших исследований особенно в условиях, не рассматриваемых в настоящем стандарте.
2 Термины и определения
В настоящем стандарте применен следующий термин с соответствующим определением.
2.1 входной механический импеданс (системы "кисть - рука") (mechanical impedance of the hand-arm system at the driving point): Комплексное отношение динамической силы F, действующей в области контакта кисти с вибрирующей поверхностью, к скорости вибрации поверхности в той же области
, определяемое по формуле
(
) = F(
)/
(
), (1)
где - угловая частота, рад/с.
Примечание 1 - Механический импеданс может быть получен из эффективной массы системы "кисть - рука", определяемой как комплексное отношение динамической силы к ускорению вибрации а по формуле
(
) = F(
)/
(
). (2)
Примечание 2 - Соотношение между механическим импедансом и эффективной массой определяется формулой
(
) =
![]() (
(), (3)
где =
- мнимая единица.
Примечание 3 - Указанные биодинамические характеристики тела человека являются функциями комплексной переменной, т.е. включают в себя действительную и мнимую части, которые могут быть выражены через модуль и фазу частотной характеристики.
3 Входной механический импеданс системы "кисть - рука"
Значения модуля и фазы входного механического импеданса приведены в таблицах 1-3 для трех ортогональных направлений возбуждения. Эти же характеристики показаны на рисунках 1-3 в логарифмическом масштабе частоты. Направления возбуждения соответствуют осям ,
и
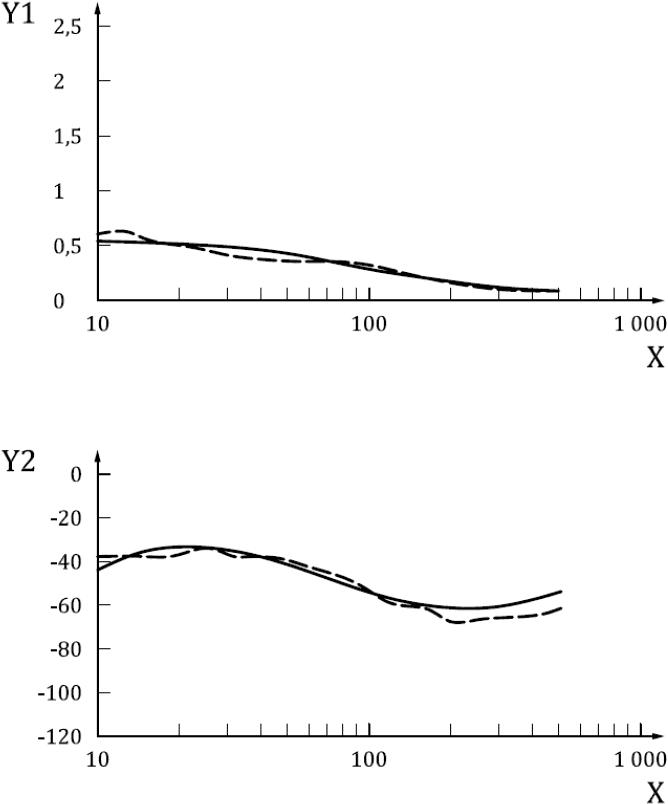
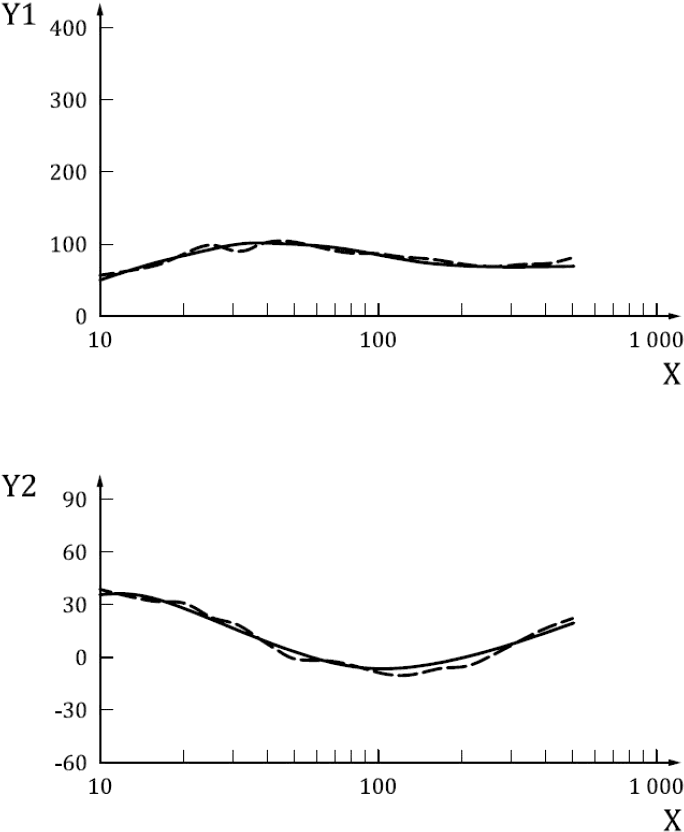
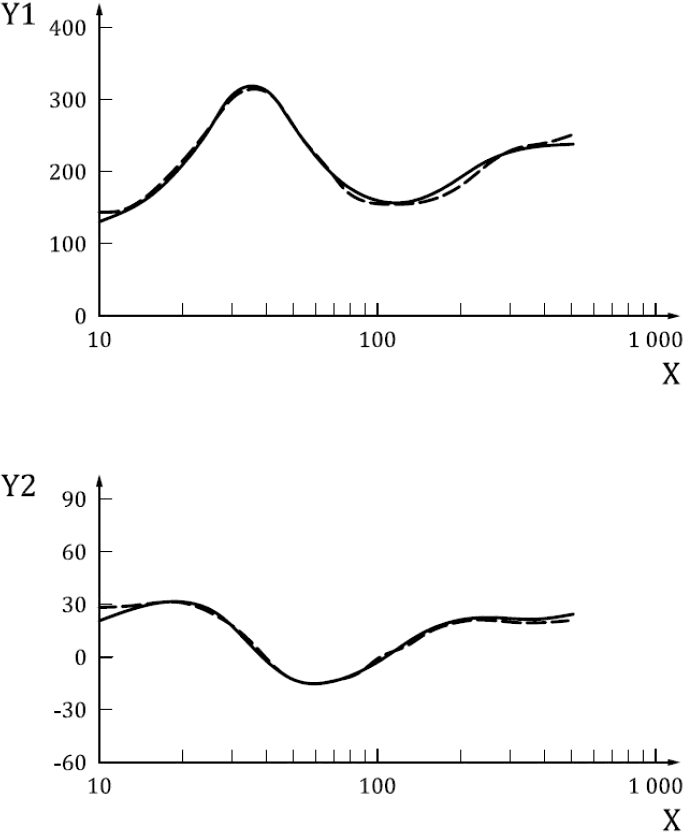
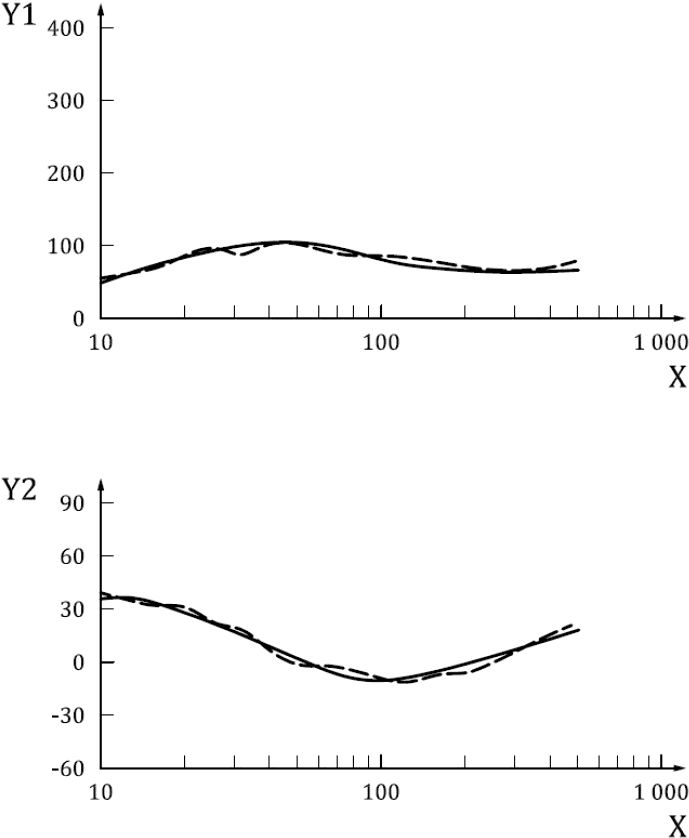
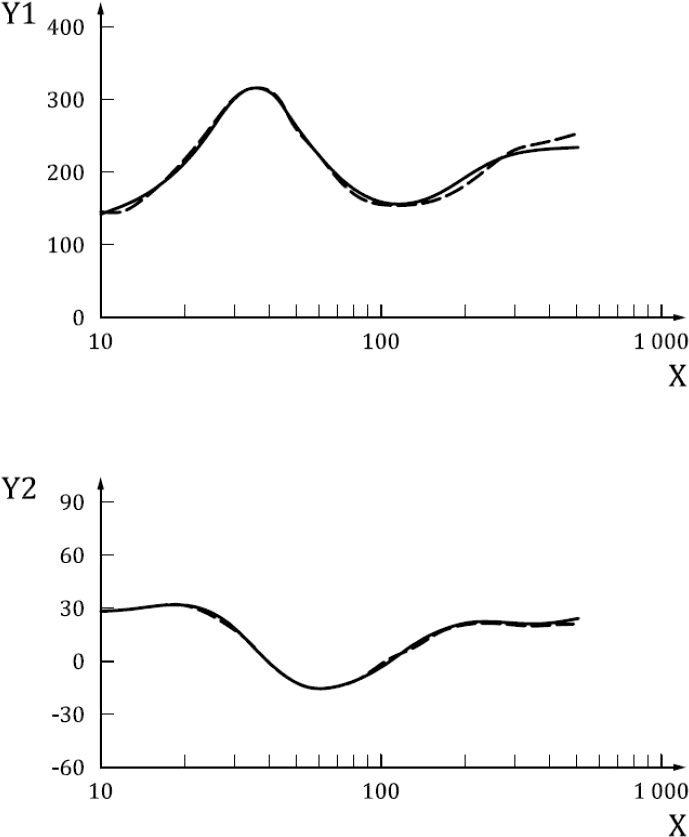
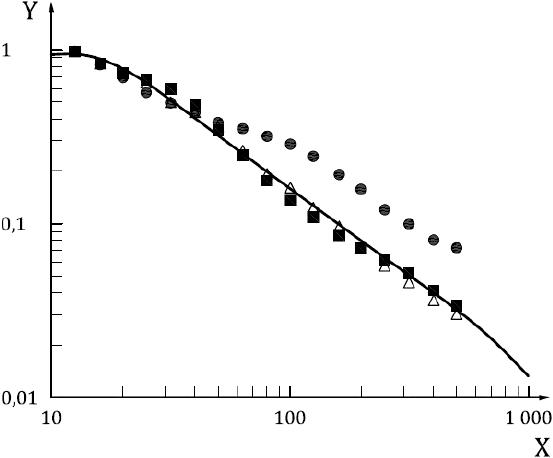
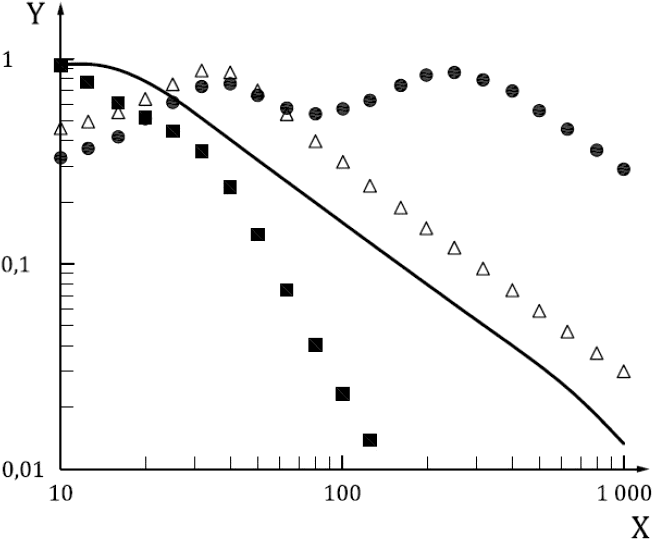
базицентрической системы координат (см. рисунок 5). Каждая таблица и каждый рисунок содержат по три значения модуля и фазы для каждого значения частоты, показывающих диапазон возможных изменений входного механического импеданса, - среднее значение, а также верхнее и нижнее граничные значения. Средние значения, полученные в каждом проведенном исследовании входного механического импеданса, попадают в диапазон между нижним и верхним граничными значениями. Нижняя и верхняя границы диапазона возможных значений на рисунках 1-3 показаны полужирными линиями, а общее среднее значение по всем исследованиям - пунктирной линией.
Все значения в таблицах 1-3 приведены с точностью до трех значащих цифр. Это сделано в целях их использования для последующих расчетов и не должно рассматриваться как характеристика точности определения соответствующих величин. Для получения значений входного механического импеданса на частотах иных, чем указаны в таблицах 1-3, может быть применена линейная интерполяция.
Приложения, воспроизводящие или применяющие значения входного механического импеданса, находящиеся между нижней и верхней границей, удовлетворяют требованиям настоящего стандарта.
Если в каком-либо приложении требования настоящего стандарта выполнены только для определенных частот или диапазонов частот, то эти частоты должны быть идентифицированы.
Примечание - Поскольку нижняя и верхняя границы входного механического импеданса построены по средним значениям, полученных в сериях исследований, значения импеданса для отдельного человека могут оказаться за пределами этих границ.
Таблица 1 - Значения входного механического импеданса для системы "кисть - рука" в направлении
Частота, Гц | Модуль, Н·с/м | Фаза, град | ||||
Нижняя граница | Среднее | Верхняя граница | Нижняя граница | Среднее | Верхняя граница | |
10 | 24 | 38 | 59 | 36 | 53 | 68 |
12,5 | 30 | 49 | 71 | 38 | 53 | 69 |
16 | 33 | 54 | 80 | 38 | 53 | 70 |
20 | 36 | 64 | 84 | 38 | 54 | 71 |
25 | 43 | 72 | 104 | 38 | 57 | 72 |
31,5 | 51 | 80 | 125 | 38 | 53 | 73 |
40 | 62 | 95 | 154 | 37 | 53 | 73 |
50 | 74 | 112 | 189 | 36 | 51 | 70 |
63 | 90 | 140 | 233 | 33 | 47 | 66 |
80 | 109 | 172 | 280 | 29 | 43 | 63 |
100 | 120 | 199 | 300 | 23 | 37 | 60 |
125 | 124 | 211 | 302 | 18 | 31 | 57 |
160 | 123 | 210 | 294 | 11 | 29 | 52 |
200 | 120 | 208 | 287 | 7 | 23 | 48 |
250 | 119 | 189 | 287 | 6 | 24 | 45 |
315 | 120 | 207 | 302 | 6 | 25 | 44 |
400 | 134 | 224 | 360 | 8 | 26 | 45 |
500 | 168 | 292 | 442 | 10 | 29 | 47 |
Таблица 2 - Значения входного механического импеданса для системы "кисть - рука" в направлении
Частота, Гц | Модуль, Н·с/м | Фаза, град | ||||
Нижняя граница | Среднее | Верхняя граница | Нижняя граница | Среднее | Верхняя граница | |
10 | 21 | 55 | 80 | 20 | 39 | 55 |
12,5 | 23 | 62 | 90 | 15 | 35 | 54 |
16 | 26 | 70 | 106 | 11 | 32 | 52 |
20 | 30 | 86 | 119 | 6 | 31 | 49 |
25 | 35 | 96 | 128 | 1 | 23 | 44 |
31,5 | 40 | 88 | 132 | -6 | 18 | 39 |
40 | 48 | 102 | 135 | -12 | 7 | 30 |
50 | 55 | 101 | 130 | -18 | -1 | 22 |
63 | 61 | 93 | 117 | -22 | -2 | 16 |
80 | 64 | 86 | 106 | -23 | -5 | 10 |
100 | 63 | 86 | 106 | -23 | -9 | 7 |
125 | 60 | 80 | 106 | -22 | -11 | 6 |
160 | 54 | 77 | 107 | -19 | -7 | 7 |
200 | 49 | 71 | 108 | -16 | -6 | 9 |
250 | 45 | 67 | 110 | -11 | 0 | 17 |
315 | 45 | 69 | 113 | -7 | 8 | 30 |
400 | 51 | 71 | 118 | -4 | 16 | 45 |
500 | 66 | 79 | 134 | 1 | 22 | 56 |
Таблица 3 - Значения входного механического импеданса для системы "кисть - рука" в направлении
Частота, Гц | Модуль, Н·с/м | Фаза, град | ||||
Нижняя граница | Среднее | Верхняя граница | Нижняя граница | Среднее | Верхняя граница | |
10 | 120 | 145 | 200 | 15 | 29 | 45 |
12,5 | 80 | 149 | 225 | 10 | 29 | 46 |
16 | 133 | 181 | 250 | 5 | 31 | 48 |
20 | 141 | 217 | 325 | 0 | 31 | 49 |
25 | 200 | 266 | 361 | 0 | 26 | 44 |
31,5 | 275 | 311 | 365 | -2 | 16 | 27 |
40 | 240 | 315 | 358 | -13 | -1 | 6 |
50 | 220 | 263 | 321 | -33 | -13 | 3 |
63 | 140 | 216 | 285 | -47 | -15 | 1 |
80 | 95 | 170 | 240 | -37 | -11 | -2 |
100 | 85 | 158 | 239 | -12 | -1 | 6 |
125 | 100 | 156 | 240 | -5 | 6 | 20 |
160 | 108 | 163 | 247 | 5 | 16 | 30 |
200 | 113 | 184 | 271 | 10 | 21 | 34 |
250 | 150 | 212 | 320 | 13 | 21 | 29 |
315 | 150 | 235 | 363 | 5 | 20 | 30 |
400 | 190 | 243 | 365 | 2 | 21 | 32 |
500 | 185 | 254 | 362 | 7 | 21 | 30 |
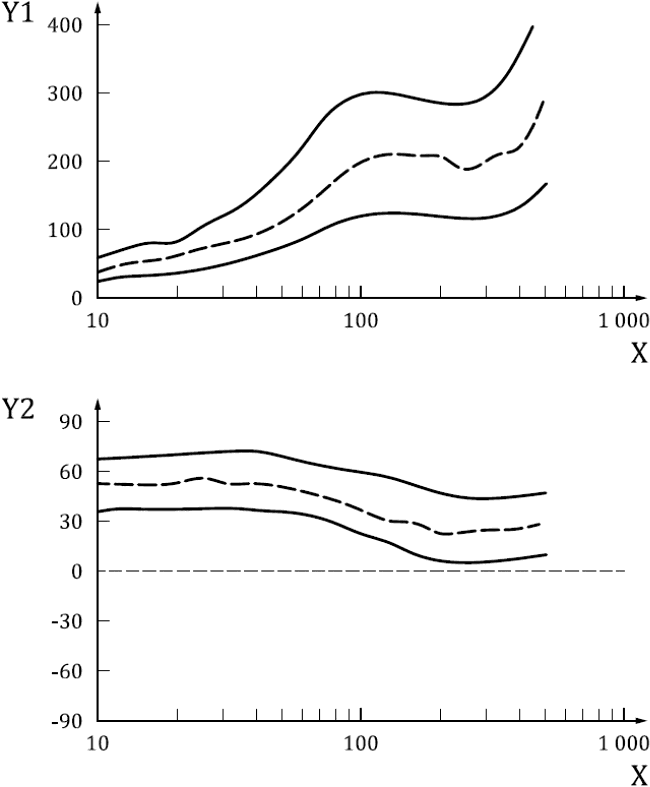
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок 1 - Значения входного механического импеданса для системы "кисть - рука" в направлении
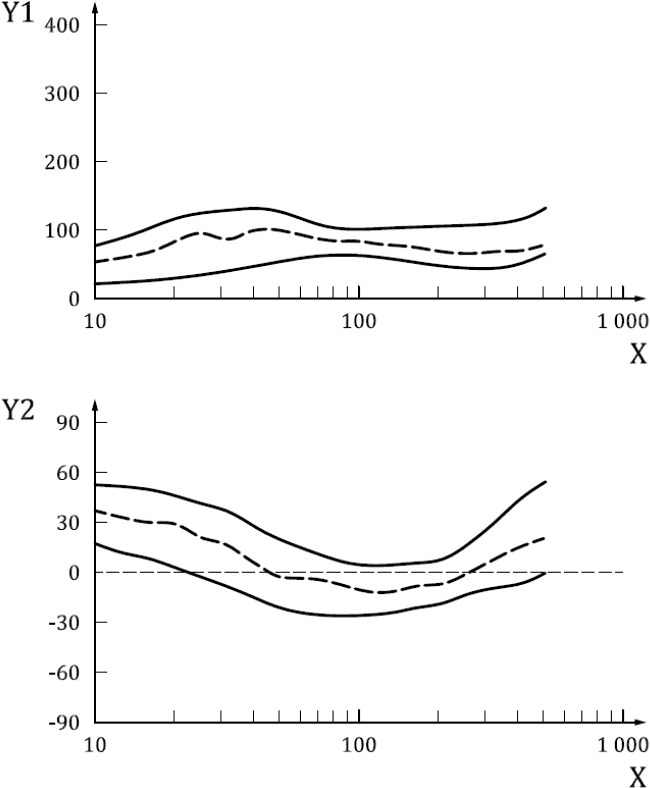
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок 2 - Значения входного механического импеданса для системы "кисть - рука" в направлении
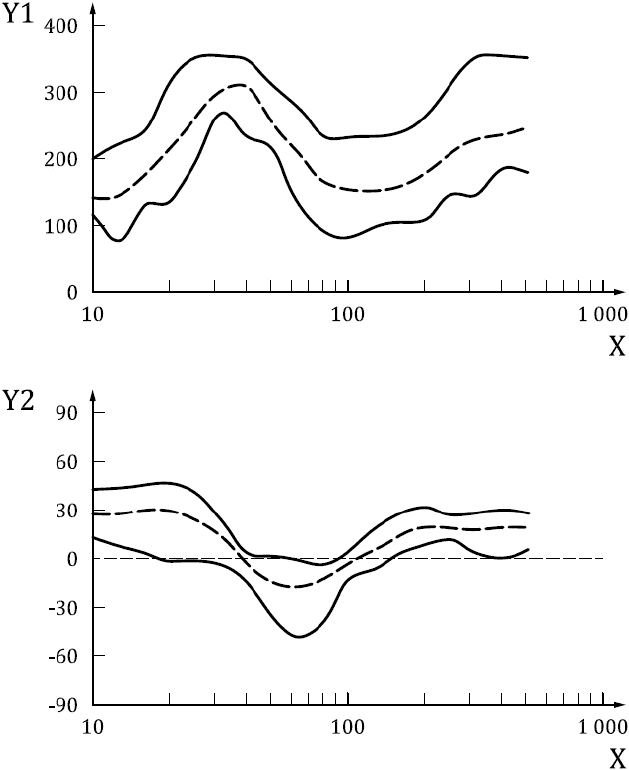
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок 3 - Значения входного механического импеданса для системы "кисть - рука" в направлении
4 Условия применения данных о входном механическом импедансе
Установленные настоящим стандартом значения входного механического импеданса системы "кисть - рука" применимы в отношении лиц мужского пола при выполнении следующих условий (пределы применимости приблизительно соответствуют диапазону условий измерений, при которых были получены экспериментальные данные):
a) углы ,
и
, определяющие положение руки относительно корпуса, должны находиться в диапазонах, указанных на рисунке 4;
b) запястье должно находиться в нейтральном положении, как показано на рисунке 5 (с допустимым отклонением ±15°);
c) обнаженная кисть руки обхватывает рукоятку диаметром от 19 до 45 мм. Данные о входном механическом импедансе могут быть применены для рукояток некруглого сечения при условии, что минимальный и максимальный размеры в поперечном сечении находятся в диапазоне от 19 до 45 мм;
d) сила обхвата находится в диапазоне от 25 до 50 Н, а сила подачи не превышает 50 Н.
Примечание 1 - Данные о входном механическом импедансе были преимущественно получены в результате исследований для правой руки, но могут быть применены также и для левой руки оператора.
Примечание 2 - Данные о входном механическом импедансе при необходимости могут быть применены в отношении лиц женского пола. Однако исследования показывают, что модуль входного механического импеданса для женщин может быть до 20% ниже соответствующего значения для мужчин.
Примечание 3 - Исследования показали, что повышение силы обхвата приводит к увеличению модуля входного механического импеданса, особенно на частотах выше 50 Гц.
Примечание 4 - Модуль и фаза входного механического импеданса не изменяются значительно при изменении силы подачи на частотах выше 100 Гц. На более низких частотах отмечено увеличение модуля входного механического импеданса с ростом силы подачи. Однако для сил подачи вплоть до 100 Н это увеличение не превысит 10%.
Примечание 5 - Входной механический импеданс может незначительно изменяться при изменении мощности вибрации рукоятки, особенно когда основные частотные составляющие находятся в диапазоне ниже 100 Гц. Данные настоящего стандарта предполагают применение к среднеквадратичным значениям некорректированного ускорения вплоть до 50 м/с в диапазоне частот от 10 до 500 Гц.

Примечание - Положительное изменение угла - в направлении движения по часовой стрелке.
Рисунок 4 - Возможные положения руки оператора
Примечание 1 - Центр базицентрической системы координат располагается на оси рукоятки, используемой для измерений функций биодинамического отклика.
Примечание 2 - Направление оси приблизительно совпадает с направлением силы подачи, прилагаемой к рукоятке в предположении ее использования по назначению. Оно параллельно оси предплечья или совпадает с ней при нейтральном положении кисти. Ось
совпадает с осью рукоятки. Ось
перпендикулярна к
и
.
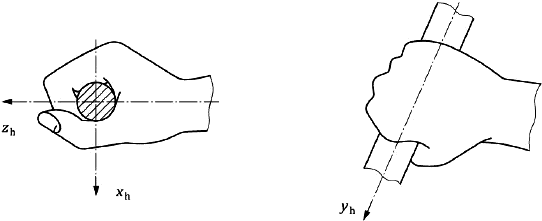
Рисунок 5 - Базицентрическая система координат для измерений функций биодинамического отклика системы "кисть - рука"
Примечание 6 - Ожидается, что одежда оператора не будет оказывать существенного влияния на значения входного механического импеданса на низких частотах (до 25 Гц). Данные были получены в результате исследований, проведенных различными лабораториями при комнатной температуре с участием операторов в обычной рабочей одежде.
Примечание 7 - Надетые перчатки обычно увеличивают модуль входного механического импеданса на низких частотах (до 25 Гц), но могут привести к его снижению на более высоких частотах.
5 Приложения
5.1 Общие положения
Входной механический импеданс системы "кисть - рука" представляет собой векторную сумму импедансов, распределенных по всей области контакта кисти с вибрирующей поверхностью. В большинстве практических приложений для анализа динамики ручного инструмента и свойств антивибрационных рукояток достаточно знания суммарного импеданса, и в этом случае могут быть непосредственно применены данные таблиц 1-3. Если предполагается работа с ручным инструментом при обхвате двух рукояток разными руками и при этом положения рук и условия их контакта с поверхностями рукояток приблизительно одинаковы, то можно использовать удвоенное значение импеданса на каждой частоте.
Однако в ряде случаев, например при оценке передаточных свойств антивибрационных перчаток и вибрационной мощности, передаваемой на ладонь оператора, отклик определяется только частью распределенного импеданса. В этом случае суммирование следует выполнять только по той области контакта, которая эффективно участвует в формировании отклика.
5.2 Оценка передаточных свойств упругих материалов при нагружении системой "кисть - рука"
В приложении А приведены зависящие от частоты опорные значения входного механического импеданса системы "кисть - рука" в направлении для силы обхвата 30 Н, силы подачи 50 Н и угла локтевого сгиба 90°, а также его распределение по области ладони и пальцам руки. Эти значения предназначены для оценки передаточных свойств упругих материалов при их нагружении системой "кисть - рука" (см. [7]). В целях сравнения предсказанного коэффициента передачи с измеренным согласно [6] следует использовать распределение входного механического импеданса по области ладони.
Если по результатам измерений или иной оценки известны жесткость, коэффициент демпфирования и масса упругого материала, то для определения коэффициента передачи материала в области ладони и пальцев руки может быть использован метод моделирования, описанный в приложении Е.
5.3 Механические модели системы "кисть - рука"
Механические модели системы "кисть - рука", соответствующие данным настоящего стандарта, рассматриваются в приложениях В-D. Эти модели имеют разную степень сложности в зависимости от целей применения. Сведения, приведенные в указанных приложениях, позволяют облегчить математическое моделирование динамического поведения системы и сконструировать ее механические имитаторы для последующего использования в составе испытательного оборудования.
Примечание 1 - Выбор биодинамической функции (механический импеданс или эффективная масса) при создании модели зависит, в первую очередь, от назначения модели. Если целью является исследование динамической силы в области контакта, то для описания системы "кисть - рука" предпочтительно использовать эффективную массу, поскольку динамическая сила непосредственно определяется через эту частотную характеристику системы. Значение эффективной массы системы уменьшается с ростом частоты, поэтому при моделировании на основе данной биодинамической функции будет подчеркнута реакция системы в низкочастотной области. Это делает данный способ моделирования особенно удобным при проектировании, анализе динамического поведения и испытаниях ручных машин и средств вибрационной защиты. В свою очередь, моделирование на основе входного механического импеданса предпочтительнее при оценке поглощаемой мощности вибрации, поскольку та непосредственно выражается через импеданс системы.
Примечание 2 - Биодинамическое моделирование может быть использовано для приближенного предсказания значений входного механического импеданса системы "кисть - рука" в диапазоне частот до 1 кГц.
5.4 Оценка вибрационной мощности, поглощаемой системой "кисть - рука" в зависимости от частоты
Механическую мощность , поглощаемую системой "кисть - рука" на угловой частоте
, можно оценить на основе действительной части входного механического импеданса
![]() и ускорения
и ускорения вибрации в области ладони по формуле
(
) =
![]() (
()
 , (4)
, (4)
Относительное поглощение в третьоктавной полосе частот можно рассчитать по формуле
(
) = 0,958
 , (5)
, (5)
где - опорное значение частоты для нормирования, а коэффициент 0,958 представляет собой максимальное значение определенной в третьоктавных полосах функции частотной коррекции для локальной вибрации (см. [2]).
Примечание - Формулы (4) и (5) получены в предположении линейности системы "кисть - рука", что на практике выполняется лишь в определенном приближении. Нелинейность системы приводит к погрешности получаемых по данным формулам оценок, поэтому их можно использовать только для ориентировочного оценивания зависимости поглощения вибрационной мощности от частоты.
Поглощение мощности какой-то частью кисти можно оценить на основе модели, зная спектр вибрации. Частотно-зависимое относительное поглощение
оценивают по формуле
(
) = 0,958
 . (6)
. (6)
Примеры приведены в приложении F.
Приложение А
(справочное)
Опорные значения входного механического импеданса системы "кисть - рука" в направлении
Частотно-зависимые опорные значения входного механического импеданса системы "кисть - рука" в направлении в диапазоне частот от 10 до 500 Гц приведены в таблице А.1. Эти значения были получены в результате лабораторных измерений импеданса для лиц мужского пола и предназначены для оценки передаточных свойств упругих материалов при их нагружении системой "кисть - рука" (см. [7]). Значения входного механического импеданса для частот, отличных от приведенных в таблице А.1, можно получить линейной интерполяцией. Опорные значения применяют в отношении лиц мужского пола при выполнении следующих условий:
a) угол сгиба в локтевом суставе должен быть 90° (с допустимым отклонением ±15°), а углы ,
и
, определяющие положение руки относительно корпуса, должны находиться в диапазонах, указанных на рисунке 4, при соблюдений условий, перечисленных в b), с) и d);
b) запястье должно быть в нейтральном положении (с допустимым отклонением ±15°), как показано на рисунке 5;
c) кисть руки обхватывает рукоятку диаметром от 19 до 45 мм. Данные о входном механическом импедансе могут быть применены для рукояток некруглого сечения при условии, что минимальный и максимальный размеры в поперечном сечении находятся в диапазоне от 19 до 45 мм;
d) сила обхвата равна (30±5) Н, а сила подачи - (50±8) Н.
Примечание - Эти условия сопоставимы с требуемыми для испытаний антивибрационных перчаток согласно [6].
Таблица А.1 - Опорные значения входного механического импеданса в направлении для системы "кисть - рука", для областей ладони и пальцев
Частота, Гц | Система "кисть - рука" | Ладонь | Пальцы | |||
Модуль, Н·с/м | Фаза, град | Модуль, Н·с/м | Фаза, град | Модуль, Н·с/м | Фаза, град | |
10 | 145 | 29 | 112 | 25 | 32 | 37 |
12,5 | 149 | 29 | 123 | 26 | 35 | 40 |
16 | 181 | 31 | 141 | 28 | 42 | 43 |
20 | 217 | 31 | 166 | 27 | 51 | 44 |
25 | 266 | 26 | 201 | 23 | 63 | 41 |
31,5 | 311 | 16 | 238 | 11 | 76 | 32 |
40 | 315 | -1 | 241 | -7 | 78 | 18 |
50 | 263 | -13 | 206 | -20 | 69 | 12 |
63 | 216 | -15 | 165 | -26 | 61 | 15 |
80 | 170 | -11 | 134 | -26 | 59 | 24 |
100 | 158 | -1 | 115 | -22 | 64 | 34 |
125 | 156 | 6 | 103 | -16 | 76 | 40 |
160 | 163 | 16 | 94 | -9 | 96 | 42 |
200 | 184 | 21 | 90 | -2 | 116 | 39 |
250 | 212 | 21 | 89 | 5 | 134 | 33 |
315 | 235 | 20 | 89 | 14 | 142 | 25 |
400 | 243 | 21 | 93 | 22 | 141 | 20 |
500 | 254 | 21 | 99 | 31 | 137 | 19 |
Приложение В
(справочное)
Модель 1
На рисунке В.1 изображен механический имитатор системы "кисть - рука" с двумя степенями свободы. Модель одного и того же вида применима ко всем трем направлениям движения. Вследствие своей простоты модель хорошо подходит для использования в составе оборудования для испытаний ручных машин, если основным объектом изучения является динамическая сила в области контакта руки и вибрирующей поверхности. Поскольку динамическая сила непосредственно связана с эффективной массой системы "кисть - рука", параметры модели получены через значения эффективной массы, определенные с помощью уравнения (3) из средних значений импеданса, указанных в таблицах 1-3 (см. примечание 2 к 2.1). В таблице В.1 приведены значения параметров модели для разных направлений движения. Соответствующие значения эффективных масс показаны на рисунках В.2-В.4.
В модели с двумя степенями свободы используемые массы, пружины и демпферы не соответствуют физиологическому строению кисти и руки человека.
Таблица В.1 - Параметры модели 1
Параметр | Единица измерения | Направление | ||
кг | 0,5479 | 0,5374 | 1,2458 | |
кг | 0,0391 | 0,0100 | 0,0742 | |
Н/м | 400 | 400 | 1000 | |
Н/м | 0 | 17648 | 50000 | |
Н·с/м | 22,5 | 38,3 | 108,1 | |
Н·с/м | 202,6 | 75,5 | 142,4 | |
Примечание - Хотя модель легко использовать в целях анализа, построить реальный имитатор с заданными характеристиками по всем трем направлениям движения затруднительно. В этом случае можно сконструировать имитатор на основе параметров для направления , которое является основным для испытаний ручных машин многих видов. Малая масса
, высокая жесткость
и большой коэффициент демпфирования
соответствуют динамическим свойствам мягких тканей кисти руки (ладони и пальцев), для имитации которых могут быть использованы кусок резины или другого упругого материала.
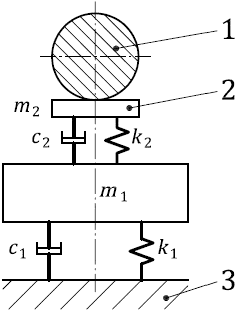
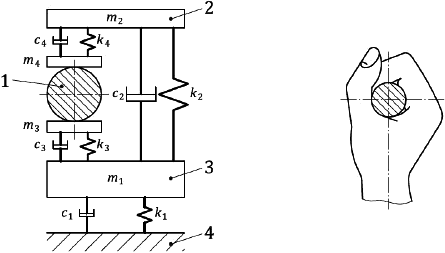
1 - рукоятка; 2 - кожный покров кисти руки; 3 - верхняя часть тела
Примечание - В данной модели с двумя степенями свободы используемые массы, пружины и демпферы не соответствуют физиологическому строению кисти и руки человека.
Рисунок В.1 - Механический имитатор системы "кисть - рука" с двумя степенями свободы
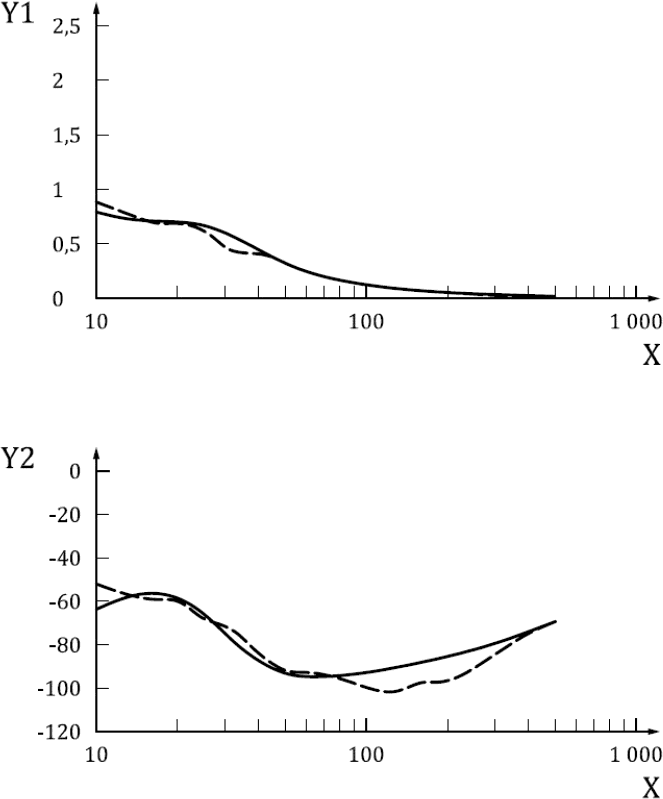
X - частота, Гц; Y1 - эффективная масса, кг; Y2 - фаза, градус
Рисунок В.2 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) эффективной массы системы "кисть - рука" в направлении
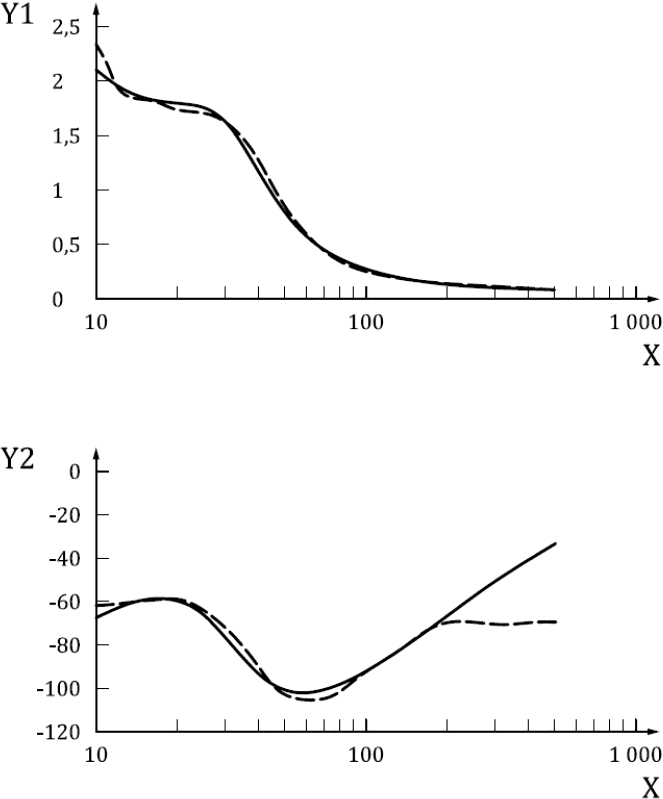
X - частота, Гц; Y1 - эффективная масса, кг; Y2 - фаза, градус
Рисунок В.3 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) эффективной массы системы "кисть - рука" в направлении
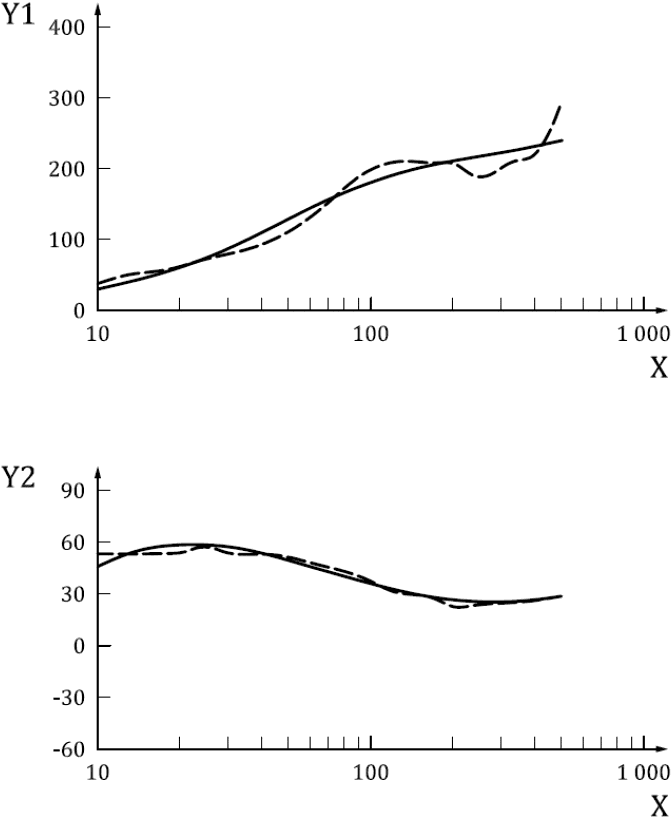
X - частота, Гц; Y1 - эффективная масса, кг; Y2 - фаза, градус
Рисунок В.4 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) эффективной массы системы "кисть - рука" в направлении
Приложение С
(справочное)
Модель 2
Модель 2 с четырьмя степенями свободы является расширением модели 1 и получена с учетом отдельного моделирования пальцев кисти руки (см. рисунок С.1). Модель одного и того же вида применима ко всем трем направлениям движения. Модель дает возможность исследовать взаимодействие пальцев руки и ладони. Параметры модели определены из значений входного механического импеданса, приведенных в таблицах 1-3. Значения параметров из таблицы С.1 использованы для получения входных механических импедансов, показанных на рисунках С.2-С.4 для разных направлений движения.
В модели с четырьмя степенями свободы используемые массы, пружины и демпферы не соответствуют в точности физиологическому строению кисти и руки человека.
Таблица С.1 - Параметры модели 2
Параметр | Единица измерения | Направление | ||
кг | 0,4129 | 0,7600 | 1,1252 | |
кг | 0,0736 | 0,0521 | 0,0769 | |
кг | 0,0163 | 0,0060 | 0,0200 | |
кг | 0,0100 | 0,0028 | 0,0100 | |
Н/м | 400 | 500 | 1000 | |
Н/м | 200 | 100 | 12000 | |
Н/м | 4000 | 4907 | 43635 | |
Н/м | 8000 | 17943 | 174542 | |
Н·с/м | 20,0 | 28,1 | 111,5 | |
Н·с/м | 100 | 39,7 | 39,3 | |
Н·с/м | 144,6 | 50,7 | 86,8 | |
Н·с/м | 79,9 | 14,3 | 121,0 | |
Примечание 1 - Хотя модель легко использовать в целях анализа, построить реальный имитатор с заданными характеристиками по всем трем направлениям движения затруднительно. В этом случае можно сконструировать имитатор на основе параметров для направления , которое является основным для испытаний ручных машин многих видов. Малые массы
и
, высокие жесткости
и
и большие коэффициенты демпфирования
и
соответствуют динамическим свойствам мягких тканей кисти руки (ладони и пальцев), для имитации которых могут быть использованы два куска резины или другого упругого материала.
Примечание 2 - Модель дает приближенные оценки входного механического импеданса в диапазоне до 1000 Гц.
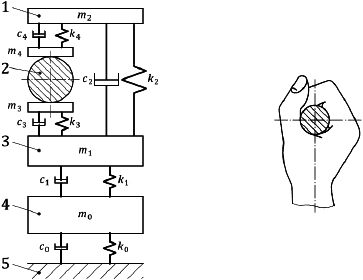
1 - рукоятка; 2 - пальцы; 3 - ладонь, запястье и остальная часть руки; 4 - верхняя часть тела
Примечание - В данной модели с четырьмя степенями свободы используемые массы, пружины и демпферы не соответствуют точно физиологическому строению кисти и руки человека.
Рисунок С.1 - Механический имитатор системы "кисть - рука" с четырьмя степенями свободы
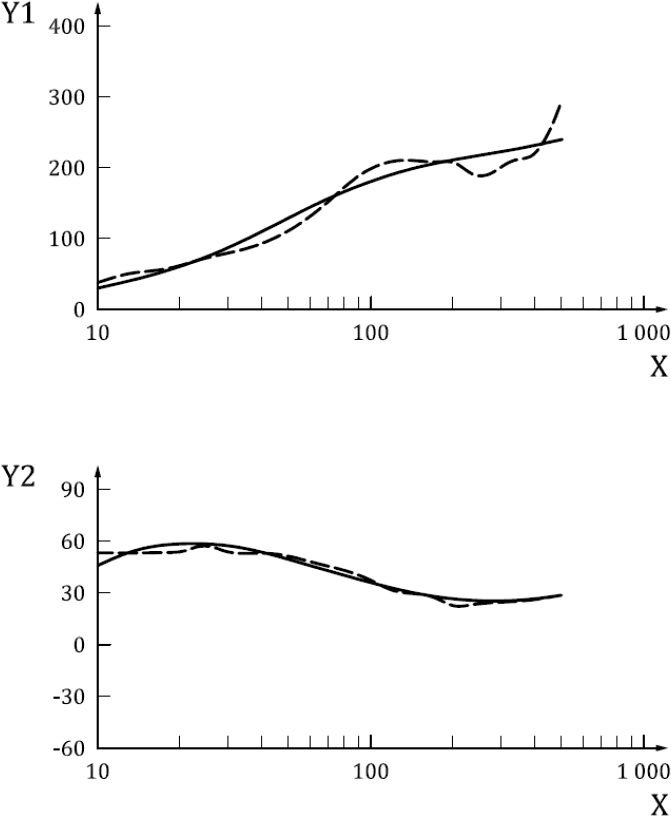
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок С.2 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) механического импеданса системы "кисть - рука" в направлении
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок С.3 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) механического импеданса системы "кисть - рука" в направлении
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок С.4 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) механического импеданса системы "кисть - рука" в направлении
Приложение D
(справочное)
Модель 3
Модель 3 с пятью степенями свободы является расширением модели 2 и получена с учетом отдельного моделирования плеча руки (см. рисунок D.1). Модель одного и того же вида применима ко всем трем направлениям движения. Параметры модели определены из значений входного механического импеданса, приведенных в таблицах 1-3. Значения параметров из таблицы D.1 использованы для получения входных механических импедансов, показанных на рисунках D.2-D.4 для разных направлений движения.
В модели с пятью степенями свободы используемые массы, пружины и демпферы не соответствуют в точности физиологическому строению кисти и руки человека, но дают грубое представление об их отдельных элементах (пальцах, системы "ладонь - запястье - предплечье", плечевом участке руки).
Таблица D.1 - Параметры модели 3
Параметр | Единица измерения | Направление | ||
кг | 0,4129 | 0,7600 | 1,1252 | |
кг | 0,4129 | 0,7600 | 1,1252 | |
кг | 0,0736 | 0,0521 | 0,0769 | |
кг | 0,0163 | 0,0060 | 0,0200 | |
кг | 0,0100 | 0,0028 | 0,0100 | |
Н/м | 400 | 500 | 1000 | |
Н/м | 400 | 500 | 1000 | |
Н/м | 200 | 100 | 12000 | |
Н/м | 4000 | 4907 | 43635 | |
Н/м | 8000 | 17943 | 174542 | |
Н·с/м | 20,0 | 28,1 | 111,5 | |
Н·с/м | 20,0 | 28,1 | 111,5 | |
Н·с/м | 100 | 39,7 | 39,3 | |
Н·с/м | 144,6 | 50,7 | 86,8 | |
Н·с/м | 79,9 | 14,3 | 121,0 | |
Примечание 1 - Вероятно, данную модель можно использовать только в целях анализа, поскольку построить реальный имитатор с заданными характеристиками затруднительно. Однако, поскольку модель 3 обеспечивает более подробное описание разных отделов кисти и руки, ее можно применять для оценки передачи и поглощения вибрации в этих отделах, особенно в направлении .
Примечание 2 - Модель дает приближенные оценки входного механического импеданса в диапазоне до 1000 Гц.
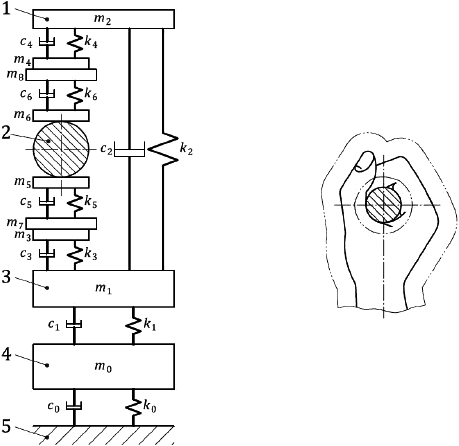
1 - пальцы; 2 - рукоятка; 3 - ладонь, запястье и предплечье; 4 - верхняя часть руки; 5 - верхняя часть тела
Примечание - В данной модели с пятью степенями свободы используемые массы, пружины и демпферы не соответствуют точно физиологическому строению кисти и руки человека, но дают грубое представление об их отдельных элементах (пальцах, системы "ладонь - запястье - предплечье", плечевом участке руки).
Рисунок D.1 - Механический имитатор системы "кисть - рука" с пятью степенями свободы
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок D.2 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) механического импеданса системы "кисть - рука" в направлении
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок D.3 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) механического импеданса системы "кисть - рука" в направлении
X - частота, Гц; Y1 - модуль, Н·с/м; Y2 - фаза, градус
Рисунок D.4 - Сравнение результатов моделирования (сплошная линия) и опорных значений (пунктирная линия) механического импеданса системы "кисть - рука" в направлении
Приложение Е
(справочное)
Модель системы "рука - кисть в перчатке"
Подобно системе "кисть - рука", перчатка также может быть приближенно представлена в виде механической системы из масс, пружин и демпферов. Значения эффективных масс, жесткостей пружин и коэффициентов демпфирования для модели перчатки могут быть получены в результате экспериментов с материалом, из которого она изготовлена. Как вариант, эти значения могут быть получены по результатам измерений входных механических импедансов системы "кисть - рука" с надетой и снятой перчаткой. Модель системы "рука - кисть в перчатке" получают комбинацией модели перчатки и модели системы "кисть - рука".
Примеры модели системы "рука - кисть в перчатке" показаны на рисунке Е.1. Параметры модели перчатки для направления приведены в таблице Е.1. В совокупности с параметрами модели системы "кисть - рука" в направлении
, приведенными в приложении D, эти данные могут быть использованы для расчетов коэффициентов передачи перчатки в области пальцев и ладони. Результаты таких расчетов показаны на рисунке Е.2. Смоделированный коэффициент передачи Т сопоставим с результатами измерений, полученных в соответствии с [6].
Таблица Е.1 - Параметры модели перчатки
Параметр | Единица измерения | Значение |
кг | 0,0020 | |
кг | 0,0010 | |
кг | 0,0673 | |
кг | 0,0200 | |
Н/м | 17,7385 | |
Н/м | 32,7301 | |
Н·с/м | 88,8 | |
Н·с/м | 75,2 |
1 - пальцы; 2 - рукоятка; 3 - ладонь, запястье и предплечье; 4 - верхняя часть руки; 5 - верхняя часть тела
Рисунок Е.1 - Механический имитатор системы "рука - кисть в перчатке" с семью степенями свободы
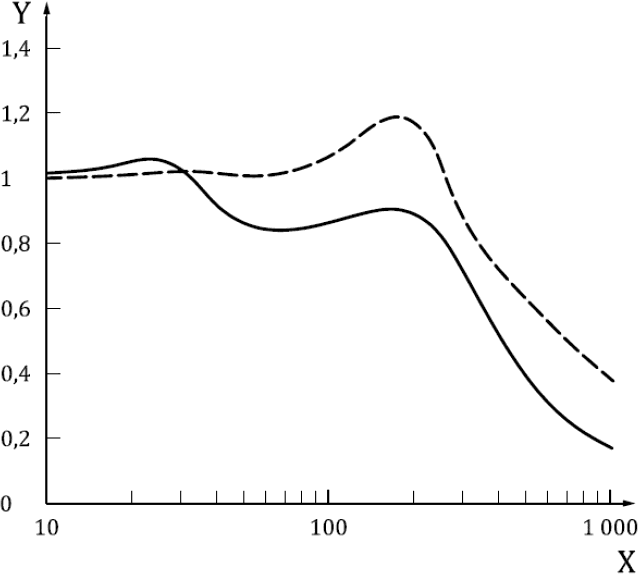
X - частота, Гц; Y - коэффициент передачи
Рисунок Е.2 - Предсказанный моделью коэффициент передачи перчаток в области пальцев (сплошная линия) и ладони (пунктирная линия) в направлении
Приложение F
(справочное)
Примеры частотных зависимостей, полученных моделированием поглощения вибрационной мощности
На рисунке F.1 показаны три зависимости поглощения вибрационной мощности от частоты, полученные по формуле (5) с использованием средних значений входного механического импеданса в направлениях ,
и
из таблиц 1-3. Эти зависимости сопоставлены с функцией частотной коррекции для локальной вибрации из [2]. Значения частотной зависимости для системы "кисть - рука" приведены в таблице F.1.
Таблица F.1 - Значения частотной зависимости поглощения мощности вибрации для системы "кисть - рука"
Частота, Гц | Направление | ||
10 | 1,055 | 1,099 | 1,186 |
12,5 | 0,958 | 0,958 | 0,958 |
16 | 0,786 | 0,809 | 0,818 |
20 | 0,676 | 0,721 | 0,651 |
25 | 0,552 | 0,632 | 0,577 |
31,5 | 0,486 | 0,488 | 0,577 |
40 | 0,417 | 0,423 | 0,466 |
50 | 0,370 | 0,338 | 0,337 |
63 | 0,342 | 0,257 | 0,241 |
80 | 0,309 | 0,194 | 0,170 |
100 | 0,278 | 0,155 | 0,132 |
125 | 0,237 | 0,119 | 0,105 |
160 | 0,187 | 0,092 | 0,082 |
200 | 0,153 | 0,071 | 0,069 |
250 | 0,116 | 0,055 | 0,059 |
315 | 0,096 | 0,044 | 0,050 |
400 | 0,078 | 0,035 | 0,040 |
500 | 0,070 | 0,029 | 0,032 |
Примечание 1 - Частотная зависимость поглощения вибрационной мощности достаточно хорошо совпадает с функцией частотной коррекции для локальной вибрации из [2].
На рисунке F.2 показаны три зависимости поглощения вибрационной мощности от частоты для основных частей системы "кисть - рука" (пальцы, запястье и предплечье, верхняя часть руки), полученные по формуле (6), для направления . Эти зависимости сопоставлены с функцией частотной коррекции для локальной вибрации из [2]. Указанные зависимости получены с использованием модели 3 (приложение D). Значения частотных зависимостей для среднегеометрических частот третьоктавных фильтров приведены в таблице F.2.
Таблица F.2 - Значения частотных зависимостей для пальцев руки, системы "ладонь - запястье - предплечье" и верхней части руки в направлении
Частота, Гц | Частотная зависимость для разных частей руки | ||
Пальцы | Ладонь - запястье - предплечье | Верхняя часть руки | |
10 | 1,055 | 1,099 | 1,186 |
12,5 | 0,958 | 0,958 | 0,958 |
16 | 0,786 | 0,809 | 0,818 |
20 | 0,676 | 0,721 | 0,651 |
25 | 0,552 | 0,632 | 0,577 |
31,5 | 0,486 | 0,488 | 0,577 |
40 | 0,417 | 0,423 | 0,466 |
50 | 0,370 | 0,338 | 0,337 |
63 | 0,342 | 0,257 | 0,241 |
80 | 0,309 | 0,194 | 0,170 |
100 | 0,278 | 0,155 | 0,132 |
125 | 0,237 | 0,119 | 0,105 |
160 | 0,187 | 0,092 | 0,082 |
200 | 0,153 | 0,071 | 0,069 |
250 | 0,116 | 0,055 | 0,059 |
315 | 0,096 | 0,044 | 0,050 |
400 | 0,078 | 0,035 | 0,040 |
500 | 0,070 | 0,029 | 0,032 |
Примечание 2 - Частотные зависимости для отдельных частей руки показывают, что вибрационная мощность на низких частотах (менее 25 Гц) может эффективно передаваться и поглощаться в каждой из них. Поэтому низкочастотный инструмент может вызывать больший дискомфорт, что подтверждается как лабораторными исследованиями, так и измерениями на местах его применения. Частотная зависимость для ладони, запястья и предплечья показывает наличие резонанса в этой части руки в направлении (в районе частоты 31,5 Гц), который зависит преимущественно от жесткости и эффективной массы этой части руки. Частотная зависимость для пальцев отражает наличие как общего резонанса для системы "кисть - рука", так и локальных резонансов пальцев (в районе частоты 250 Гц). Большая разница в полученных кривых предполагает, что получение повреждений и травм разными частями руки будет определяться частотным составом воздействующей вибрации.
X - частота, Гц; Y - нормированная частотная зависимость; - направление
;
- направление
;
- направление
Примечание - Опорная частота для нормирования - 12,5 Гц.
Рисунок F.1 - Сравнение функции частотной коррекции из [2] с частотными зависимостями поглощения мощности системой "кисть - рука" в направлениях ,
и
X - частота, Гц; Y - нормированная частотная зависимость; - пальцы;
- ладонь, запястье и предплечье;
- верхняя часть руки
Примечание - В качестве опорной частоты для нормирования использована та, в которой поглощение вибрационной мощности максимально для данной части руки.
Рисунок F.2 - Сравнение функции частотной коррекции из [2] с частотными зависимостями поглощения мощности разными частями руки: пальцами, системой "ладонь - запястье - предплечье", верхней частью руки
Приложение G
(справочное)
Измерения механического импеданса системы "кисть - рука"
В соответствии с определениями функций биодинамического отклика для их получения необходимо измерять динамическую силу и вибрацию. Обычно для этих целей используют специальную рукоятку с установленными на ней датчиками силы и акселерометрами. Скорость вибрации, необходимую для расчета механического импеданса, получают из сигнала ускорения. Другой возможностью является расчет механического импеданса по полученным значениям эффективной массы в соответствии с формулой (3) (см. примечание 2 к 2.1), что позволяет исключить процедуру интегрирования сигнала ускорения.
Поскольку на результаты измерений динамических сил влияет масса большей части рукоятки, необходимо исключить ту часть импеданса или эффективной массы, которая обусловлена самой рукояткой. Для этого проводят измерения указанных частотных характеристик, когда рукоятку не обхватывает рука оператора.
Примечание 1 - Эффективная масса рукоятки также является комплексной функцией частоты. Разность фаз в сигналах силы и ускорения может привести к большому значению фазы механического импеданса на частотах ниже 40 Гц. На более высоких частотах погрешность измерения импеданса системы "кисть - рука" может быть связана с тем, что эффективная масса кисти обычно мала по сравнению с массой рукоятки. Погрешность можно уменьшить, если выполнить коррекцию полученных частотных характеристик для всей системы, включающей рукоятку и руку оператора, в частотной области.
Настоятельно рекомендуется при испытаниях использовать не менее трех маленьких металлических грузов разной массы [например, (5±1) г, (15±2) г и (30±5) г] для калибровки и подтверждения характеристик измерительной системы. Каждый груз жестко прикрепляют к рукоятке, после чего изменение сигнала во всем диапазоне частот измерений не должно превышать 5% для амплитуды и ±10° для фазы.
Чтобы обеспечить надежность крепления грузов, их контактные поверхности должны иметь закругления под форму рукоятки. Грузы можно устанавливать с помощью одной или нескольких резиновых лент. Массу ленты необходимо рассматривать как часть общей массы груза.
При измерениях механического импеданса или эффективной массы контролируют прилагаемую к рукоятке силу. Измерения силы выполняют с использованием рекомендаций [8]. В частности, сила обхвата представляет собой квазистатическую составляющую силы, прилагаемую пальцами руки, и она может быть измерена с помощью тех же датчиков силы, установленных на рукоятке. Сила подачи - это тоже квазистатическая сила, действующая со стороны ладони. Она может быть измерена с помощью отдельного датчика, установленного на рукоятке, или посредством силовой платформы, на которую встает участник испытаний.
Примечание 2 - Обычно кисть и руку представляют как систему, в которой движения в трех взаимно перпендикулярных направлениях независимы. В действительности, полной независимости в этих движениях нет. Измерения перекрестных составляющих частотных характеристик требуют использования многокоординатных измерительных систем.
Библиография
[1] | ISO 2041, | Mechanical vibration, shock and condition monitoring - Vocabulary |
[2] | ISO 5349-1, | Mechanical vibration - Measurement and evaluation of human exposure to hand-transmitted vibration - Part 1: General requirements |
[3] | ISO 5805, | Mechanical vibration and shock - Human exposure - Vocabulary |
[4] | ISO 7626-1, | Mechanical vibration and shock - Experimental determination of mechanical mobility - Part 1: Basic terms and definitions, and transducer specifications |
[5] | ISO 8727, | Mechanical vibration and shock - Human exposure - Biodynamic coordinate systems |
[6] | ISO 10819, | Mechanical vibration and shock - Hand-arm vibration - Method for the measurement and evaluation of the vibration transmissibility of gloves at the palm of the hand |
[7] | ISO 13753, | Mechanical vibration and shock - Hand-arm vibration - Method for measuring the vibration transmissibility of resilient materials when loaded by the hand-arm system |
[8] | ISO 15230, | Mechanical vibration and shock - Coupling forces at the man-machine interface for hand-transmitted vibration |
[9] | Besa A.J., Valero F.J., Suner J.L., Carballeira J. Characterization of the mechanical impedance of the human hand-arm system: The influence of vibration direction, hand-arm posture and muscle tension. Int. J. Indust. Ergon. 2007, 37, pp.225-231 | |
[10] | Burstrom L. Measurement of the impedance of the hand-arm system. Int. Arch. Occup. Environ. Health. 1990, 62, pp.431-439 | |
[11] | Okada A., Taylor W., Dupuis H.eds. Hand-arm vibration. Kanazawa. Kyoei Press, 1990, pp.167-72. | |
[12] | Dong J.H., Dong R.G., Rakheja S., Welcome D.E., McDowell T.W., Wu J.Z. A method for analyzing absorbed power distribution in the hand and arm substructures when operating vibrating tools. J. Sound Vibrat. 2008, 311, pp.1286-1309 | |
[13] | Dong R.G., Welcome D.E., McDowell T.W., W u J.Z. Measurement of biodynamic response of human hand-arm system. J. Sound Vibrat. 2006, 294, pp.807-827 | |
[14] | Dong R.G., Welcome D.E., McDowell T.W., Wu J.Z., Schopper A.W. Frequency weighting derived from power absorption of fingers-hand-arm system under | |
[15] | Dong R.G., Dong J.H., Wu J.Z. Rakheja, S. Modeling of biodynamic responses distributed at the fingers and the palm of the human hand-arm system. J. Biomech. 2007, 40, pp.2335-2340 | |
[16] | Dong R.G., McDowell T.W., Welcome D.E., Warren С., W u J.Z., Rakheja S. Analysis оf antivibration gloves mechanism and evaluation methods. J. Sound Vibrat. 2009, 321, pp.435-453 | |
[17] | Dong R.G., Rakheja S., McDowell T.W., Welcome D.E. Wu, J.Z. Estimation of the biodynamic responses distributed at fingers and palm based on the total response of the hand-arm system. Int. J. Indust. Ergon. 2010, 40, pp.425-436 | |
[18] | Gurram R. A study of the hand-arm response characteristics under vibration, Ph.D. Thesis, Concordia University, 1993 | |
[19] | Gurram R., Rakheja S., Brammer A.J. Driving-point mechanical impedance of the human hand-arm system: Synthesis and model development. J. Sound Vibrat. 1995, 180, pp.437-458 | |
[20] | Hempstock T.I., & O'Connor D.E. Measurement of impedance of hand-arm system. Proc. Inst. Acoust. 1989, 11, pp.483-490 | |
[21] | Hesse M. Die Antwort des Hand-Arm-Systems auf stochastische Erregung und ihre Anwendung im Schwingungsschutz [Response of the hand arm system to stochastic excitation and its application to protection against vibration], Ph.D. Thesis, University of Dortmund, 1989 | |
[22] | Jandak Z. Energy transfer to the hand-arm system and exposure to vibration. In: Okada, A., Taylor, W., Dupuis, H., editors. Hand-arm vibration. Kanazawa: Kyoei Press, 1990, pp.49-54 | |
[23] | Kihlberg S. Biodynamic response of the hand-arm system to vibration from an impact hammer and a grinder. Int. J. Indust. Ergon. 1995, 16, pp.1-8 | |
[24] | Kinne J., Latzel К., Schenk T. Application of two-hand impedance as basis for mechanical modeling. Proc. 9th Int. Conf. Hand-Arm Vibration, Nancy, 2001, pp.113-118 | |
[25] | Lundstrom R., & Burstrom L. Mechanical impedance of the human hand-arm system. Int. J. Indust. Ergon. 1989, 3, pp.235-242 | |
[26] | Marcotte P., Aldien Y., Boileau P.-E., Rakheja S., Boutin J. Effect of handle size and hand-handle contact force on the biodynamic response of the hand-arm system under | |
[27] | Meltzer G., & Melzig-Thiel R. Schatte, M. Ein mathematisches Schwingungsmodell | |
[28] | Mishoe J.W., & Suggs C.W. Hand-arm vibration, Part 2: Vibrational response of the human hand. J. Sound Vibrat. 1977, 4, pp.545-558 | |
[29] | Panzke K.J., & Balasus W. Time dependence and non-linearity of impedance of the human hand-arm system while exposed to intense vibration. Int. Arch. Occup. Environ. Health. 1985, 57, pp.35-45 | |
[30] | Rakheja S., Wu J.Z., Dong R.G., Schopper A.W. A comparison of biodynamic models of the human hand-arm system for applications to hand-held power tools. J. Sound Vibrat. 2002, 249, pp.55-82 | |
[31] | Reynolds D.D., & Falkenberg R.J. A study of hand vibration on chipping and grinding operations, part II: Four-degree-of-freedom lumped parameter model of the vibration of the human hand. J. Sound Vibrat. 1984, 95, pp.499-514 | |
[32] | Schenk Т., Kinne J., Gillmeister F. A real hand-arm model for use in hand-held tool test stands for vibration studies. Proc. 9th Int. Conf. Hand-Arm Vibration, Nancy, 2001, pp.121-127 | |
УДК 534.322.3.08:006.354 | ОКС 17.160 |
Ключевые слова: кисть, рука, механический импеданс, эффективная масса, измерения | |
Электронный текст документа
и сверен по:
, 2016
{kind=link}