ГОСТ Р 55108-2012
Группа Э50
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальные навигационные спутниковые системы
МОРСКИЕ ДИФФЕРЕНЦИАЛЬНЫЕ ПОДСИСТЕМЫ. КОНТРОЛЬНО-КОРРЕКТИРУЮЩАЯ СТАНЦИЯ
Общие требования, методы и требуемые результаты испытаний
Global navigation satellite systems. Maritime differential subsystems. Reference station. General requirements, test methods and required test results
ОКС 47.020.40*
________________
* В ИУС 7-2013 ГОСТ Р 55108-2012 приводится с ОКС 33.070.40. -
- .
Дата введения 2013-05-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004* "Стандартизация в Российской Федерации. Основные положения"
________________
* На территории Российской Федерации документ не действует. Действует ГОСТ Р 1.0-2012. - .
Сведения о стандарте
1 РАЗРАБОТАН Закрытым акционерным обществом "Центральный научно-исследовательский и проектно-конструкторский институт морского флота" (ЗАО "ЦНИИМФ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 "Радионавигация"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 ноября 2012 г. N 810-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемом информационном указателе "Национальные стандарты". В случае пересмотра или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт распространяется на контрольно-корректирующую станцию (далее - ККС), входящую в состав морской дифференциальной подсистемы глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС/GPS/ГАЛИЛЕО, используемой на водном транспорте [1].
Настоящий стандарт устанавливает требования к ККС в части формирования корректирующей информации и контроля качества функционирования контрольно-корректирующей станции и ГНСС ГЛОНАСС/GPS/ГАЛИЛЕО в рабочей зоне [2].
Настоящий стандарт определяет состав аппаратуры, технические характеристики и эксплуатационные параметры ККС, взаимосвязь элементов дифференциальной подсистемы ГЛОНАСС/GPS/ГАЛИЛЕО и стандартизацию параметров интерфейса выходных данных, а также нормы, методы и требуемые результаты испытаний ККС ГНСС [3].
Настоящий стандарт может быть также применен для различных вариантов использования дифференциальной подсистемы, включая наземные и спутниковые линии связи для передачи корректирующей информации.
Настоящий стандарт не распространяется на дополнительные возможности, связанные с вычислительными функциями и передачей выходных данных, которые обеспечены в аппаратуре и которые не должны ухудшать основные характеристики ККС.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 52866-2007 Глобальная навигационная спутниковая система. Станция контрольно-корректирующая локальная гражданского назначения. Технические требования
ГОСТ Р МЭК 60945-2007 Морское навигационное оборудование и средства радиосвязи. Общие требования. Методы испытаний и требуемые результаты испытаний
ГОСТ Р 52928-2010 Система спутниковая навигационная глобальная. Термины и определения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться замененным (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины, определения, обозначения и сокращения
3.1 В настоящем стандарте применены термины по ГОСТ Р 52928, а также следующие термины с соответствующими определениями:
3.1.1 абсолютные координаты: Пространственные координаты объекта в прямоугольной геоцентрической системе координат или на земном эллипсоиде.
3.1.2 абсолютная точность: Точность определения местоположения потребителя в геоцентрической пространственной системе координат.
3.1.3 возраст поправок: Разность между отсчетом времени (модифицированный Z-счет) в заголовке сообщения RTCM о поправках и текущим временем ГНСС ГЛОНАСС и GPS.
3.1.4 временной сдвиг: Расхождение шкал времени приемной аппаратуры и времени UTC (SU).
3.1.5 возвышение спутника: Угол возвышения спутника над горизонтом.
3.1.6 время ожидания: Разность между временем передачи опорной станцией первого бита данного сообщения и меткой времени в заголовке сообщений поправок псевдодальностей, переданных опорной станцией. Метка времени в заголовке сообщения является отсчетом времени (т.н. модифицированный Z-счет), который наиболее близок ко времени последнего измерения, на момент которого выработаны поправки.
3.1.7 геометрический фактор: Величина, характеризующая качественную оценку точности измерений координат и времени в спутниковых навигационных системах.
3.1.8 дифференциальные поправки: Корректирующие поправки, передаваемые контрольно-корректирующими станциями для повышения точности определения координат места.
3.1.9 дифференциальный режим: Режим работы навигационной аппаратуры потребителей с целью достижения в заданном районе прецизионной точности обсерваций с учетом дифференциальных поправок.
3.1.10 доступность системы: Вероятность получения потребителем в рабочей зоне достоверной информации о своем местоположении в заданный момент времени и с требуемой точностью. Процент времени на определенном временном интервале, в течение которого обеспечиваются заданные условия.
3.1.11 индикатор качества поправок: Показатель качества поправок псевдодальностей, определяемых на синхронизированные моменты времени приема поправок от одного и того же спутника.
3.1.12 контрольная станция; КС: Оборудование и программно-вычислительное средство, входящее в состав ККС и предназначенное для оперативного контроля состояния и управления функционированием ККС и РМк с заданными характеристиками.
3.1.13 корректирующая информация: Данные, содержащие дифференциальные поправки к измеряемым навигационным параметрам, и другие сообщения, используемые в навигационной аппаратуре потребителя для повышения точности и надежности навигационных определений.
3.1.14 обсервация: Навигационное наблюдение с целью получения информации о координатах места потребителя.
3.1.15 опорная станция; ОС: Радиотехническое оборудование, входящее в состав контрольно-корректирующей станции и предназначенное для выработки дифференциальных поправок.
3.1.16 погрешность дифференциальной дальности потребителя (UDRE): Средняя квадратическая погрешность поправки псевдодальности из-за влияния окружающего шума и разности в многолучевости принимаемых сигналов.
3.1.17 погрешность навигационного определения: Статистическая характеристика разности между найденным положением потребителя и истинными координатами для произвольной точки в зоне обслуживания в течение заданного интервала времени.
3.1.18 процент ошибочных сообщений: Число информационных битов, принятых с ошибками, отнесенное к общему числу переданных битов.
3.1.19 программная переустановка данных ККС: Перезапуск всех вычислений, производимых опорной станцией.
3.1.20 разность псевдодальностей: Неисправленная составляющая погрешности каждой поправки псевдодальности.
3.1.21 разность скорости изменения псевдодальности: Разность между последней полученной поправкой скорости изменения псевдодальности и текущей скоростью изменения псевдодальности, измеренной на СИК.
3.1.22 система координат: Опорная система координат, используемая для расчета координат места.
3.1.23 станция интегрального контроля; (СИК): Радиотехническое оборудование, входящее в состав ККС и предназначенное для непрерывного контроля содержания дифференциальных сообщений, формируемых опорной станцией, а также целостности сигналов ККС и параметров радиомаяка.
3.1.24 скорость передачи данных: Число информационных битов, передаваемых в секунду.
3.2 В настоящем стандарте применены следующие обозначения и сокращения:
ГАЛИЛЕО - Европейская глобальная спутниковая система;
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
ДГЛОНАСС - дифференциальная подсистема ГНСС ГЛОНАСС;
ДГАЛИЛЕО - дифференциальная подсистема ГНСС ГАЛИЛЕО;
ДПС - дифференциальная подсистема;
КИ - корректирующая информация;
МДПС - морская дифференциальная подсистема;
MER - процент ошибочных сообщений;
MSK - минимальный фазовый сдвиг;
ОГ - опорный генератор;
РМк - радиомаяк;
С/Ш - отношение сигнал/шум;
СКП - средняя квадратическая погрешность;
ASCII - Американский стандартный код для информационного обмена;
GPS - глобальная навигационная спутниковая система Соединенных Штатов Америки;
С/А - открытый код доступа;
DGPS - дифференциальная подсистема ГНСС GPS;
HDOP - горизонтальный геометрический фактор ухудшения точности местоопределения в режиме двухмерных измерений;
IOD - номер набора эфемерид спутника GPS, использованного для расчета поправок;
NMEA - Национальная ассоциация морской электроники;
PRC - поправка псевдодальности;
PRCM - область адреса, с которого начинается каждое RSIM сообщение;
RCM - мнемоническое обозначение стандарта RTCM;
RRC - поправка к скорости изменения псевдодальности;
RSIM - протокол обмена между опорной станцией и станцией интегрального контроля;
RTCM - радиотехническая комиссия по морским службам;
VSWR - отношение напряжений стоячей волны;
UDRE - погрешность дифференциальной дальности потребителя;
URA - точность определения дальности потребителя;
UTC - универсальное координированное время.
4 Технические и эксплуатационные требования
4.1 Общие требования
В настоящем стандарте сообщения, передаваемые ККС потребителю, обозначаются как "RTCM-сообщение", а сообщения, передаваемые между узлами и элементами ККС, как "RSIM-сообщение".
Требования к оборудованию ККС включают:
- назначение ККС только для морских потребителей или для широкого круга специальных потребителей высокоточной информации ГНСС;
- необходимость измерения ускорения псевдодальностей;
- использование разнесенных или совмещенных опорных станций и станций интегрального контроля;
- необходимость выдачи предупреждений о расхождении измерений скорости изменения псевдодальностей;
- электропитание оборудования и диапазон рабочих температур.
4.2 Состав оборудования и функциональное назначение элементов морской дифференциальной подсистемы
В настоящем стандарте использованы параметры в соответствии с ГОСТ Р 52866, а также параметры окружающей среды и нормы испытаний, представленные в ГОСТ Р МЭК 60945.
Контрольно-корректирующая станция дифференциальной подсистемы ГНСС должна содержать следующие устройства [4]:
- основной и резервный комплекты опорных станций для определения дифференциальных поправок, формирования корректирующей информации и передачи ее в радиомаяк;
- основной и резервный комплекты станции интегрального контроля для контроля качества навигационных полей и формируемой корректирующей информации;
- контрольную станцию для обеспечения возможности оперативного контроля состояния и управления функционированием ККС;
- аппаратуру избирательного доступа;
- передатчик радиомаяка для передачи корректирующей информации потребителям.
4.2.1 Опорная станция
Опорная станция использует эталонный приемник спутниковых сигналов и MSK модулятор для формирования и передачи сообщений RTCM. MSK модулятор изображен как составная часть ОС на рисунке 1.
|
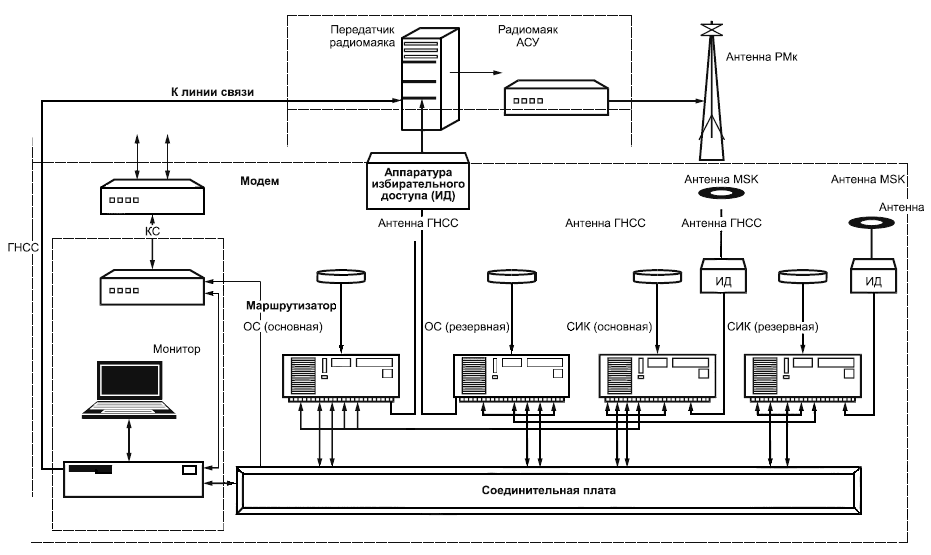
Рисунок 1 - Контрольно-корректирующая станция дифференциальной подсистемы ГНСС ГЛОНАСС/GPS
Передача данных о коде и фазе несущей в регистратор и/или в канал связи осуществляется в зависимости от требований, предъявляемых к дифференциальной подсистеме.
Опорная станция может располагаться как в непосредственной близости от радиомаяка, так и на некотором удалении от него.
Рекомендуется опорную станцию и станцию интегрального контроля размещать в непосредственной близости от радиомаяка, так как это упрощает взаимодействие составных частей ККС и повышает надежность.
Рекомендуемый состав оборудования ККС ДПС и структурно-функциональная схема представлены на рисунке 1 [5].
4.2.2 Станция интегрального контроля
Станция интегрального контроля принимает дифференциальные поправки и проверяет их достоверность в допустимых пределах. СИК постоянно обеспечивает обратную связь с ОС для индикации и контроля ее нормального функционирования. При выходе корректирующей информации за допустимые пределы вырабатывается сигнал тревоги.
Наиболее важными являются сигналы тревоги при превышении погрешности обсервованных координат от эталонных значений свыше допустимых пределов, установленных в СИК, а также при отклонении принятых поправок к псевдодальностям от рассчитанных СИК.
4.2.3 Контрольная станция
Контрольная станция принимает информацию о нарушении нормальной работы дифференциальной подсистемы, локализует места отказов и вырабатывает соответствующие корректирующие воздействия. КС управляет также установкой и изменением параметров оборудования.
4.2.4 Радиомаяк
Радиомаяк обеспечивает передачу корректирующей информации, формируемой ОС, используя класс излучения G1D.
4.2.5 Регистратор данных
Регистратор данных предназначен для записи и хранения информации. Формат записи и программное обеспечение могут быть произвольными, обеспечивая при этом наиболее эффективное использование памяти.
4.2.6 Линия передачи данных
Опорная станция и СИК осуществляют обмен данными через порты.
Станция интегрального контроля должна иметь не менее трех портов: для обмена с КС, регистратором и ОС.
Опорная станция должна иметь не менее трех портов: для обмена с КС, регистратором и СИК. Для связи элементов ККС используются различные линии передачи данных.
4.2.7 Резервирование аппаратуры
Для обеспечения требуемых эксплуатационных характеристик ККС могут применяться различные уровни резервирования.
Опорная станция и радиомаяк всегда должны иметь 100% резервирование. ККС должна иметь автономные источники электропитания, обеспечивающие ее работоспособность при временном отключении внешних источников.
4.3 Требования по назначению контрольно-корректирующей станции
ККС МДПС ГНСС должна обеспечивать решение следующих задач:
- прием и обработку ОС и СИК сигналов:
- ГЛОНАСС - L1/L2 диапазонов в стандартном режиме работы;
- GPS - L1/L2 диапазонов (С/А - код);
- ГАЛИЛЕО - L1/Е5а/Е5b диапазонов [8], [9];
- измерение псевдодальностей по всем принимаемым сигналам ГНСС ГЛОНАСС, GPS и ГАЛИЛЕО, временную привязку измерений к системной шкале ГНСС ГЛОНАСС (GPS);
- расчет дифференциальных поправок и формирование корректирующей информации для навигационных сигналов спутников ГНСС ГЛОНАСС, GPS и ГАЛИЛЕО;
- выдачу КИ в реальном масштабе времени. КИ должна передаваться в виде кадров, включающих непосредственно дифференциальные поправки и другую дополнительную информацию, необходимую для функционирования дифференциальной подсистемы. Формат и содержание кадров КИ должны определяться соответствующим стандартом;
- передачу КИ в диапазоне частот 283,5-325 кГц с использованием MSK модуляции (класс излучения G1D);
- регистрацию корректирующей информации;
- непрерывный анализ качества навигационных полей ГНСС ГЛОНАСС, GPS и ГАЛИЛЕО;
- формирование и выдачу информации о качестве навигационных полей и корректирующей информации;
- обмен информацией между элементами ККС с использованием стандартизованных сообщений;
- непрерывный контроль качества функционирования элементов ККС;
- автоматическое переключение отказавшего элемента ККС на резервный комплект.
5 Опорная станция
Опорная станция включает в своем составе приемник сигналов ГНСС ГЛОНАСС/GPS/ГАЛИЛЕО и модулятор.
Основная функция ОС - вычисление поправок псевдодальностей до спутников ГНСС ГЛОНАСС, GPS и ГАЛИЛЕО, которые находятся в зоне радиовидимости выше заданного угла отсечки.
Примечание - ОС на свободных каналах может следить также за спутниками ниже угла отсечки, даже если для этих спутников не передаются поправки.
Опорная станция вычисляет поправки псевдодальностей по сигналам ГЛОНАСС, GPS и ГАЛИЛЕО при работе в стандартном режиме по С/А коду.
Корректирующая и вспомогательная информация, вырабатываемая ОС, преобразуется в формат RTCM SC104* и передается по коаксиальной линии к передатчику [5].
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Опорная станция имеет два порта для обмена информацией с контрольной станцией, используя RSIM сообщения. Приемный порт соединен с СИК.
СИК периодически осуществляет обратную связь с ОС (RSIM сообщение #20) для гарантии контроля работы ККС.
СИК немедленно оповещает ОС о нарушениях в работе спутника или превышении порога точности решения навигационной задачи.
5.1 Характеристики опорной станции
Опорная станция, входящая в состав оборудования ККС и формирующая дифференциальные поправки, в зависимости от назначения и решаемых задач, обеспечивает режимы работ - "морская навигация" или "многофункциональный" режим.
Работа ККС в режиме "морская навигация" обеспечивает решение задач безопасного плавания судов в прибрежных водах, на подходах к портам и по каналам.
"Многофункциональный" режим позволяет обеспечивать специальные виды работ, которые нуждаются в высокой точности измерения координат. К числу таких работ относятся гидрографические, промерные и дноуглубительные работы.
В зависимости от используемого режима работы различие между опорными станциями ККС заключается в качестве и точности измерений при формировании поправок псевдодальности и скорости их изменения.
Опорная станция в пределах рабочей зоны дифференциальной подсистемы в режиме "морская навигация" обеспечивает погрешность определений координат порядка 5 м (для 95% вероятности).
"Многофункциональный" режим работы ОС в дополнение к решаемым навигационным задачам обеспечивает более широкий круг задач и состав потребителей, нуждающихся в измерении координат в реальном масштабе времени с погрешностью менее 1 м. Основное требование к опорной станции, работающей в "многофункциональном" режиме, является использование формата передачи корректирующей информации со скоростью 200 бод.
5.2 Измерение и коррекция псевдодальностей
Характеристики опорной станции, приведенные в 5.3.1-5.3.10, должны обеспечиваться при следующих условиях работы:
- минимальный уровень мощности сигнала ГНСС в диапазоне LI (код С/А) на входе антенны должен быть не ниже минус 160 дБВт при углах возвышения спутников над горизонтом более 7,5°;
- для приведенного уровня сигнала минимальное время слежения за спутником после обнаружения сигнала должно быть не менее 120 с;
- в зоне радиовидимости должны находиться как минимум четыре спутника ГЛОНАСС/GPS/ГАЛИЛЕО.
5.3 Технические характеристики аппаратуры опорной станции
5.3.1 Средняя квадратическая погрешность измерения фазы сигнала С/А кода
Средняя квадратическая погрешность измерения фазы сигнала С/А кода в "многофункциональном" режиме работы ОС не должна превышать 30 см. СКП измерений фазы сигнала в "морском" режиме работы ОС не более 80 см.
5.3.2 Средняя квадратическая погрешность измерения скорости изменения дальности С/А кода
Средняя квадратическая погрешность измерения скорости изменения дальности С/А кода в "многофункциональном" режиме работы ОС не должна превышать 4 см/с, а в "морском" режиме работы ОС не должна превышать 10 см/с.
5.3.3 Средняя квадратическая погрешность коррекции псевдодальности сигнала С/А кода
Средняя квадратическая погрешность коррекции псевдодальности сигнала С/А кода в "многофункциональной" ОС не должна превышать 35 см, а в "морской" ОС не должна превышать 85 см.
Это определяется выбором масштабного коэффициента в сообщениях RTCM #1 и #9.
5.3.4 Средняя квадратическая погрешность поправок к скорости изменения дальности С/А кода
Средняя квадратическая погрешность поправок к скорости изменения дальности С/А кода в "многофункциональной" ОС не должна превышать 5 см/с, а в "морской" ОС не должна превышать 11 см/с.
Это определяется качеством используемого опорного генератора ОС.
5.3.5 Время задержки поправок псевдодальностей
Среднее время формирования поправок в "многофункциональном" и "морском" режимах работы ОС должно быть менее 1,0 с.
5.3.6 Показатель качества поправок
При скорости передачи корректирующей информации 100 бод и наличии в зоне радиовидимости девяти спутников, для которых формируются поправки, СКП формируемых поправок "многофункциональной" ОС не должна превышать 0,6 м, а СКП "морской" опорной станции - 1,4 м.
5.3.7 Точность выработки погрешности дифференциальной дальности потребителя
Погрешность дифференциальной дальности потребителя представляет собой оценку СКП измерения дифференциальных поправок, которая зависит от следующих факторов:
- соотношение сигнал/шум;
- многолучевость и сглаживание.
5.3.8 Помехоустойчивость
Опорный генератор опорной станции должен работать в таком режиме, чтобы любое внезапное или аномальное изменение псевдодальности или эфемерид спутника не привело к превышению установленных порогов и корректировки псевдодальностей для остальных спутников.
5.3.9 Реакция на предупреждение о признаке координат
Признак измеренных координат передается в сообщении RSIM #20. Заголовок из двух слов для всех сообщений обеспечивает оценку состояния работоспособности станции. После получения СИК сигнала о признаке координат последующее полное передаваемое сообщение RTCM должно включить эту информацию, если сообщение не передается в течение 1 с.
5.3.10 Реакция на предупреждение о признаке псевдодальности
После получения на СИК сигнала о признаке измеренной псевдодальности в сообщении RSIM #20, в последующих сообщениях RTCM #1 или RTCM #9 параметры "псевдодальность" и "скорость измерения псевдодальности" должны быть установлены в состояние "не использовать", если следующее полное сообщение не передается в течение 1 с.
5.3.11 Реакция на сигнал - отсутствие контроля
Если сообщение RSIM #20 показывает отсутствие контроля за работой ОС, или сообщение RSIM #20 не получено от СИК в течение времени, установленного сообщением RSIM #11, ОС устанавливает в заголовке сообщение RTCM, чтобы указать, что радиопередача не контролируется в течение 1 с.
5.3.12 Коррекция контроля состояния радиопередачи
В режиме контроля опорная станция передает поправки только для спутников в зоне видимости, которые она получила в последнем сообщении RSIM #7 от СИК. Станция интегрального контроля посылает сообщение RSIM #7 в ОС всякий раз, когда она начинает или заканчивает слежение за видимым спутником, а также посылает его с заданным интервалом времени.
5.3.13 Минимальный рекомендуемый набор сообщений
Набор сообщений, передаваемых опорной станцией, должен включать - RTCM #1, #2, #3, #5, #6, #7, #9 и #16.
Опорная станция должна обеспечивать передачу сообщений RTCM #1, RTCM #9 группами по три сообщения для одного или двух спутников и сообщение RTCM #9 только для одного спутника.
5.3.14 Первоначальный набор данных
При выполнении операций, не использующих сообщение RTCM #2, ОС для вычисления поправок псевдодальностей перед использованием нового набора данных производит задержку в течение 90 с. Это обеспечивает возможность три раза загрузить новые эфемериды, которые содержатся в наборе данных.
5.3.15 Модулированные выходные параметры в диапазоне частот морских радиомаяков
5.3.15.1 Полоса частот
Несущая частота сигнала ККС лежит в пределах от 283,5 кГц до 325 кГц. Дискретность установки частоты 500 Гц [2].
5.3.15.2 Допуск по частоте
Точность установки несущей частоты должна быть не хуже 4 ppm, а уход частоты должен быть менее 1 ppm в год.
5.3.15.3 Модуляция - MSK
Опорная станция должна выдавать в радиомаяк данные в формате RTCM, используя модуляцию сигнала минимальным фазовым сдвигом.
MSK модуляция является усовершенствованной формой цифровой модуляции, которая является частным случаем фазовой модуляции.
При данном способе модуляции двоичный "0" представляется задержкой фазы на 90° относительно несущей, а двоичная "1" представляется опережением фазы на 90°.
5.3.15.4 Фазовый шум
Фазовый шум в полосе 10 Гц не должен превышать 80 дБ/Гц.
5.3.15.5 Скорость модуляции
ОС должна обеспечивать скорость передачи корректирующей информации 25, 50, 100 и 200 бод.
5.3.15.6 Разрыв фазы
В течение передачи MSK сигналов разрыв фазы сигнала не должен превышать 0,3°.
5.3.15.7 Внеполосные излучения
В полосе частот от 9 до 700 кГц внеполосное излучения ОС не должно превышать 60 дБс, а в полосе от 700 кГц до 2 ГГц - 50 дБс.
5.3.15.8 Выходные порты
ОС должна иметь минимум один высокочастотный порт. При использовании тонального режима идентификатора требуется два порта. В этом случае раздельные порты должны обеспечивать режимы MSK сигнала и тона идентификатора. Это позволит использовать класс излучения D передатчика.
5.3.15.9 Выходное сопротивление
Сопротивление каждого порта должно быть 50 Ом при напряжении стоячей волны (VSWR) не более 1,5.
5.3.15.10 Уровень выходного сигнала
Уровень мощности каждого порта должен быть 10±2 дБ.
5.3.15.11 Оконечные устройства
Необходимо использовать оконечные устройства с входным сопротивлением 50 Ом для каждого порта для предотвращения излучения, когда данный порт не используется.
5.3.16 Параметры окружающей среды
5.3.16.1 Диапазон рабочих температур
Для поддержания заданных характеристик аппаратуры рабочая температура должна быть в пределах от 0 °С до 50 °С для ОС, а для антенн ГЛОНАСС/GPS/ГАЛИЛЕО и предварительного усилителя от минус 40 °С до плюс 75 °С в соответствии с ГОСТ Р МЭК 60945.
5.3.16.2 Диапазон нерабочих температур
Для ОС диапазон нерабочих температур составляет от минус 30 °С до плюс 70 °С, а для антенн и предварительного усилителя ГЛОНАСС/GPS/ГАЛИЛЕО от минус 40 °С до плюс 75 °С.
5.3.16.3 Влажность
Для ОС влажность 95% без конденсации, а для антенн и предварительного усилителя 100% с конденсацией.
5.3.16.4 Предотвращение накопления осадков на антенне
Форма обтекателя антенны и поверхность экрана должны обеспечить минимальное накопление льда или снега и препятствовать посадке птиц.
5.4 Функции опорной станции
В настоящем разделе представлены функции ОС при формировании и приеме сообщений RSIM [6]. Функция "передача данных" используется только при посылке запроса от КС. В большинстве случаев контрольная станция пошлет запрос о каких-либо параметрах, которые необходимо изменить или сформировать команду, но это определяется вне ОС.
Если источник или адресат не перечислены для какой-либо функции, подразумевается, что источником или адресатом является КС.
Функциональные возможности RSIM сообщений для ОС приведены в 5.4.1-5.4.17.
5.4.1 Установка сигнальных порогов в ОС
Источник сигнала: КС
RSIM сообщение: #11
При получении сообщения RSIM #11 в ОС устанавливаются следующие сигнальные пороги:
- минимальное число спутников на слежении;
- максимальное значение величины поправки псевдодальности;
- максимальное значение скорости изменения псевдодальности;
- максимальное время обновления данных.
5.4.2 Выработка сигналов тревоги в ОС
Адресат: КС
RSIM сообщение: #12
Опорная станция формирует и передает в КС сообщение RSIM #12, когда любой из порогов, указанных в 5.4.1, превышен.
Дополнительно "чистый сигнал" посылается сообщением RSIM #12, когда сигнал тревоги прекращает свое действие. К превышению заданного порога приводит любое из следующих условий:
- недостаточное число спутников на слежении;
- в течение заданного времени не поступают сообщения от СИК;
- поправки псевдодальностей превышают допустимые пределы;
- скорость изменения псевдодальностей превысила допустимые пределы.
5.4.3 Функция управления переустановкой данных
Источник сигнала: КС
RSIM сообщение: #3
После получения сообщения RSIM #3 в ОС производится переустановка параметров радиопередачи. Существует три типа переустановки: частичная, полная и программная.
5.4.4 Изменение параметров линии передачи данных ОС
Источник: КС
RSIM сообщение: #10
После получения сообщения RSIM #10 параметры линии передачи данных изменяются и сохраняются в ОС до перезагрузки или выключения:
- частота;
- скорость передачи;
- метод модуляции, тип синхронизации;
- кодирование радиопередачи.
5.4.5 Выдача параметров линии передачи данных ОС
Адресат: КС
RSIM сообщение: #10
Параметры линии передачи данных, перечисленные в 5.4.4, выдаются в КС немедленно или периодически.
5.4.6 Изменение параметров ОС
Источник: КС
RSIM сообщения: #4, #6, #11, #22
Когда соответствующая функция КС выполнена, контрольная станция посылает сообщения RSIM #4, #6, #11, #22. Соответствующие параметры немедленно устанавливаются в ОС.
5.4.7 Выдача параметров ОС
Адресат: КС
RSIM сообщение: #4, #6, #11, #22
Контрольная станция получает сообщения RSIM #4, #6, #11, #22 по запросу или периодически.
5.4.8 Изменение установок состояния спутников
Источник: КС
RSIM сообщение: #8
После получения сообщения RSIM #8, опорная станция должна включить информацию об изменении установок состояния спутников в любое сообщение RTCM #5, которое будет передано позже. Сообщение RSIM #22 устанавливает расписание этих передач.
5.4.9 Выдача опорной станцией данных о состоянии спутников
Адресат: КС
RSIM сообщение: #9
Эта функция используется опорной станцией для выдачи следующих данных о состоянии спутников:
- спутник принудительно определен работоспособным;
- спутник принудительно определен неработоспособным;
- состояние навигационного сообщения GPS и ГЛОНАСС;
- спутники в зоне видимости.
В этом случае сообщение RSIM, которое использовалось для установки параметров, не является сообщением для выдачи данных. Только сообщение RSIM #9 выдает полные данные о состоянии спутников для каждого отслеживаемого спутника, а также статус состояния для всего созвездия.
5.4.10 Установка заголовка сообщения о состоянии спутников
Источник: СИК
RSIM сообщение: #20
После получения от СИК сигнала тревоги о координатах опорная станция немедленно устанавливает состояние заголовка с индикацией информации о нарушении нормальной работы.
5.4.11 Установка аномального значения псевдодальности
Источник: СИК
RSIM сообщение: #20
После получения от СИК сообщения обратной связи системы об ошибочности отдельного значения псевдодальности, ОС установит величины поправок PRC и RRC в следующем передаваемом сообщении RTCM #1 или RTCM #9, чтобы предупредить потребителей о немедленном прекращении использования данного спутника в решении навигационной задачи. ОС перезагружает следящий фильтр для данного спутника и возобновляет передачу поправок. Сигнал тревоги в КС посылается от станции интегрального контроля.
5.4.12 Расписание сообщений RTCM
Источник: КС
RSIM сообщение: #22
Сообщение RSIM #22 определяет все RTCM сообщения, включая поправки и вспомогательные навигационные сообщения, которые должны передаваться. КС с помощью сообщения RSIM #22 формирует график расписания работы ОС. Для вспомогательных сообщений это включает способность планировать их периодическую радиопередачу и способность запросить их непосредственную радиопередачу. Любая однократная команда не должна вызвать прерывание установленного расписания.
5.4.13 Выдача корректирующей информации
Адресат: КС
RSIM сообщение: #13
После получения однократного запроса или с заранее заданным интервалом времени элементы корректирующей информации выдаются в КС для каждого корректируемого спутника. Отметим, что ускорение псевдодальности не требуется, но может использоваться. В сообщении RSIM #13 предусмотрены поля для передачи:
- поправки псевдодальности;
- поправки к скорости изменения псевдодальности;
- ускорения псевдодальности (не обязательно);
- погрешности дифференциальной дальности потребителя;
- набора данных IOD;
- модифицированного Z-отсчета.
5.4.14 Выдача ОС данных о состоянии DGPS/ДГЛОНАСС
Адресат: КС
RSIM сообщения: #9, #13
Для обеспечения КС необходимой информацией об ОС, опорная станция будет опрашиваться для немедленной выдачи сообщения RSIM #13.
5.4.15 Выдача ОС данных о слежении за спутниками
Адресат: КС
RSIM сообщение: #7
Эта функция используется опорной станцией для выдачи в КС следующих данных о спутниках, которые находятся на слежении:
- азимут;
- угол возвышения спутника над горизонтом;
- соотношение сигнал/шум;
- погрешность дальности потребителя;
- состояние эфемерид спутников.
5.4.16 Выдача предупреждения о неопознанном сообщении
Адресат: КС
RSIM сообщение: #2
ОС должна сообщить о получении любого сообщения из КС, которое не имеет формата "$PRCM", "RSIM#", имеет сбойную контрольную сумму или является незаконченным сообщением.
5.4.17 Выдача RSIM сообщения/предупреждения о диагностике
Адресат: КС
RSIM сообщение: #5
Сообщение обеспечивает передачу данных в формате ASCII, относящихся к обнаружению неисправностей оборудования.
6 Станция интегрального контроля
Станция интегрального контроля предназначена для обеспечения контроля целостности передачи сигналов дифференциальных поправок DGPS/ДГЛОНАСС и проверки содержания поправок.
Контроль целостности состоит из процесса наблюдения и процесса контроля целостности. Контролируемые величины состоят из характеристик MSK сигналов, потока сообщений RTCM SC-104, точности корректируемых псевдодальностей DGPS/ДГЛОНАСС и результирующих измеренных координат, использующих эти дальности.
Функции контроля целостности состоят в гарантии, что показатели качества данных RTCM SC-104 совместимы с точностью данных.
Контроль целостности может обеспечивать сообщения сигналов тревоги как для отдельного параметра ОС, так и для сообщения сигналов тревоги всей принимаемой радиопередачи. Когда запланировано наблюдение за отдельной ОС, а информация от нее не принимается, СИК продолжит наблюдение за передачей дифференциальной информации, но не формирует сигналов тревог и не сохраняет никаких данных.
6.1 Характеристики станции интегрального контроля
Характеристики СИК должны выполняться при следующих условиях приема сигналов:
- минимальный уровень мощности сигнала С/А LI на входе антенны должен быть не ниже минус 160 дБВт при углах возвышения спутников над горизонтом более 7,5°;
- после обнаружения сигнала при указанном выше уровне сигнала, минимальное время слежения за спутником должно быть не менее 120 с;
- в зоне радиовидимости находятся минимум четыре спутника.
6.1.1 Точность измерения фазы сигнала С/А кода
Станция интегрального контроля в составе "многофункциональной" ККС должна обеспечивать СКП измерения фазы сигнала, не превышающую 30 см. СИК в составе "морской" ККС должна обеспечивать СКП измерения фазы сигнала, не превышающую 80 см. Эти величины определяются качеством используемого опорного генератора на ОС.
6.1.2 Точность измерения скорости изменения дальности сигнала С/А кода
Станция интегрального контроля в составе "многофункциональной" ККС должна обеспечивать СКП измерения скорости изменения дальности сигнала, не превышающую 4 см/с. СИК в составе "морской" ККС должна обеспечивать СКП, не превышающую 10 см/с. Это определяется качеством используемой ОС.
6.1.3 Время выработки сигнала тревоги
Станция интегрального контроля должна в течение 0,25 с сформировать сообщение RSIM #20, если за время наблюдения превышен любой из следующих установленных порогов сигнала тревоги:
- высокая разность измеренных псевдодальностей;
- высокая погрешность горизонтальных координат;
- высокая величина HDOP.
6.1.4 Время индикации изменения созвездия спутников
Станция интегрального контроля в течение 1 с после начала или окончания слежения за любым спутником, независимо от угла места или передачи поправок для данного спутника, посылает в ОС сообщение RSIM #7 с данными о новом спутнике, который находится на слежении.
6.1.5 Помехоустойчивость
Опорный генератор опорной станции должен работать в таком режиме, чтобы любое внезапное или аномальное изменение псевдодальности или эфемерид спутника не привело к превышению установленных порогов и корректировки псевдодальностей для остальных спутников.
6.1.6 Контроль радиопередачи в диапазоне частот морской навигации
Характеристики, приведенные в 6.1.6.3 и 6.1.6.4 должны выполняться при следующих условиях приема сигналов:
6.1.6.1 СИК установлена вблизи радиопередатчика ККС:
- напряженность поля от 1 до 24 В/м;
- сила магнитного поля от 0,18 мА/м до 4 мА/м.
Данные условия позволяют располагать приемную антенну на расстоянии 30 м от передающей антенны с эффективной мощностью излучения сигналов 250 Ватт.
6.1.6.2 СИК установлена на удалении:
- напряженность поля от 10 мкВ/м до 150 мВ/м;
- сила магнитного поля от 26,5 мА/м до 0,399 мА/м.
6.1.6.3 Характеристика достоверности приема сигнала поправок. Приемник дифференциальных поправок должен обеспечивать прием сигналов поправок с вероятностью ошибки демодуляции символа информации 10 при соотношении сигнал/шум 10 дБ и мощности 99% в полосе пропускания приемника для СИК, расположенной вблизи ОС, и 7 дБ для СИК, расположенной на удалении от радиопередатчика ККС.
6.1.6.4 Измерение уровня сигнала поправок на входе приемника. Приемник корректирующей информации должен измерять напряженность поля сигналов поправок при изменении их уровня в пределах ±1,25 дБ независимо от высоты антенны.
6.1.6.5 Измерение отношения сигнал/шум
Для СИК, расположенной на удалении от передатчика ККС, ПКИ должен измерять соотношение сигнал/шум во всей полосе MSK сигнала в пределах ±1 дБ. Для СИК, расположенной вблизи передатчика ККС, измерение соотношения сигнал/шум не требуется.
6.1.7 Параметры окружающей среды
6.1.7.1 Диапазон рабочих температур
Для поддержания заданных характеристик аппаратуры рабочая температура должна быть в пределах от минус 20 °С до плюс 50 °С для СИК, а для антенн ГЛОНАСС/GPS/ГАЛИЛЕО и предварительного усилителя от минус 40 °С до плюс 75 °С в соответствии с ГОСТ Р МЭК 60945.
6.1.7.2 Диапазон нерабочих температур
Для СИК диапазон нерабочих температур от минус 30 °С до плюс 70 °С, а для антенн и предварительного усилителя ГЛОНАСС/GPS/ГАЛИЛЕО от минус 40 °С до плюс 75 °С.
6.1.7.3 Влажность
Для СИК влажность 95% без конденсации, а для антенн и предварительного усилителя 100% с конденсацией.
6.1.7.4 Предотвращение накопления осадков на антенне
Форма обтекателя антенны и поверхность экрана должны обеспечить минимальное накопление льда или снега и препятствовать посадке птиц.
6.2 Функции станции интегрального контроля
Если в каком-либо сообщении источник или адресат не указан, подразумевается, что источником или адресатом является КС. Ниже приведены функциональные возможности RSIM сообщений от КС.
6.2.1 Выработка СИК сигналов тревог
Адресат: КС
RSIM сообщение: #17
Сигнал тревоги вырабатывается СИК и выдается КС в следующих случаях:
- высокий процент ошибочных MSK сообщений;
- низкий уровень сигнала поправок;
- низкое соотношение сигнал/шум;
- низкое число спутников на слежении;
- высокий уровень HDOP;
- высокая погрешность горизонтальных координат;
- высокие разности измеренных псевдодальностей;
- высокие разности скорости изменения псевдодальностей;
- низкая точность UDRE;
- большой возраст поправок RTCM.
Пороги для этих сигналов тревог и интервалов наблюдения устанавливаются сообщением RSIM #16.
6.2.2 Выработка СИК сообщений системы обратной связи
Адресат: КС
RSIM сообщение: #20
В случае превышения порогов сигналов тревоги для измеренных на заданном интервале времени псевдодальности или координат, СИК посылает сигнал обратной связи в ОС.
Это сообщение посылается с заданной периодичностью, что информирует ОС о том, что опорная станция контролируется.
Все пороги сигналов тревоги и интервалы наблюдений устанавливаются сообщением RSIM #16. Периодичность системы обратной связи (RSIM #20) устанавливается сообщением RSIM #1.
6.2.3 Выдача последнего сообщения RTCM
Адресат: КС
RSIM сообщение: #23
Посылается RTCM сообщение каждого типа, которое было получено последним в СИК. Данное сообщение используется при проверке фактического переданного сообщения опорной станции.
6.2.4 Функция переустановки параметров СИК
Источник: КС
RSIM сообщение: #3
После получения от КС сообщения RSIM #3, СИК производит переустановку параметров - полную, частичную или программную.
6.2.5 Изменение параметров СИК
Источник: КС
RSIM сообщение: #4, #6, #14, #16
Данные параметры разделены на четыре RSIM сообщения. После получения любого из четырех сообщений соответствующие параметры должны быть немедленно изменены.
6.2.6 Выдача параметров СИК
Адресат: КС
RSIM сообщение: #4, #6, #14, #16
После получения однократного запроса или через заданный интервал времени в КС выдается соответствующее сообщение RSIM #4, #6, #14, #16.
6.2.7 Выдача данных о состоянии дифференциальной подсистемы DGPS/ДГЛОНАСС
Адресат: КС
RSIM сообщения: #9, #19
Для обеспечения КС необходимой информацией от СИК, последняя опрашивается для выдачи сообщения RSIM #9 на приоритетной основе.
6.2.8 Выдача данных о слежении СИК за спутниками
Адресат: КС
RSIM сообщение: #7
Сообщение RSIM #7 используется СИК для выдачи данных в КС по всем спутникам, за которыми осуществляется слежение. Сообщение определяет следующие данные:
- азимут спутника;
- угол возвышения спутника над горизонтом;
- соотношение сигнал/шум;
- точность определения дальности потребителя;
- состояние спутника из навигационного сообщения GPS и ГЛОНАСС.
6.2.9 Выдача данных о слежении СИК за спутниками
Адресат: ОС
RSIM сообщение: #7
Когда опорная станция начинает или завершает слежение за спутником на заданном интервале времени, СИК передает в ОС сообщение RSIM #7.
6.2.10 Выдача характеристик СИК
Адресат: КС
RSIM сообщение: #18, #19
Сообщения RSIM #18 или RSIM #19 выдаются в КС по запросу или с заданным интервалом времени.
6.2.11 Выдача сообщения о состоянии канала связи
Адресат: КС
RSIM сообщение: #15
Станция интегрального контроля выдает в КС сообщение RSIM #15 после получения однократного или с заданным интервалом времени запроса от КС.
6.2.12 Выдача СИК данных о состоянии спутников
Адресат: КС
RSIM сообщение: #9
Станция интегрального контроля выдает в КС сообщение RSIM #9 после получения однократного или с заданным интервалом времени запроса от КС.
6.2.13 Выдача предупреждения о неопознанном сообщении
Адресат: КС
RSIM сообщение: #2
Станция интегрального контроля должна обеспечивать информацию о получении от КС любого сообщения, которое не имеет правильного заголовка NMEA (т.е. формата "$PRCM"), RSIM#2 имеет ошибку контрольной суммы или сообщение является незаконченным.
6.2.14 Выдача сообщения RSIM о предупреждении и диагностике
Адресат: КС
RSIM сообщение: #5
Сообщение RSIM #5 обеспечивает передачу данных в формате ASCII, относящихся к обнаружению неисправностей оборудования.
7 Контрольная станция
7.1 Общие положения
Контрольная станция обеспечивает возможность оперативного контроля состояния оборудования ККС и управления функционированием ККС с заданными характеристиками.
Существует несколько вариантов использования КС. Одна станция может использоваться в составе одной ККС или в составе сети ККС.
КС может находиться в одном месте с ОС и СИК или на некотором удалении от них.
При совместном размещении КС может состоять из компьютера с программным обеспечением или быть интегрирована в оборудование ОС или СИК. При такой интеграции отпадает необходимость в стандартизации RSIM сообщений, так как эти сообщения идентичны при использовании оборудования различных производителей.
Контрольная станция, как элемент ККС, необходима для морских пользователей, предъявляющих высокие требования к доступности глобальных навигационных спутниковых систем ГЛОНАСС, GPS, ГАЛИЛЕО. Возможность контроля состояния систем с помощью КС минимизируют перерывы в обслуживании при возникновении сбоев и нарушениях нормальной работы диффподсистемы.
КС обеспечивает оповещение морских потребителей информацией о состоянии ГНСС и дифференциальных подсистем, а также ожидаемые перерывы в работе.
КС должна обеспечивать хранение данных о состоянии системы с целью их последующего анализа и выработки корректирующих воздействий операторами системы. Эти функции не являются частью интегрального контроля, выполняемого СИК.
7.2 Функции контрольной станции
Функции контрольной станции, изложенные в данном разделе, используются при работе с одним или несколькими радиомаяками ККС.
Представлены только те функции, которые связаны с формированием или приемом RSIM сообщений. Для некоторых функций применяется система обозначений "1-(RSIM #)". Это означает, что сообщение RSIM #1 используется для запроса сообщения RSIM, указанного в круглых скобках, однократно или на заданном интервале сообщения.
Если источник или адресат сообщения не указан для какой-либо функции, подразумевается, что источником или адресатом сообщения является КС.
7.2.1 Функция управления радиопередачей
Адресат: ОС
RSIM сообщение: #10
Данная функция позволяет КС изменять параметры радиопередачи диффпоправок, которые установлены в ОС. Функция включает установку следующих режимов:
- начало или остановка режима DGPS модуляции;
- начало или остановка режима модуляции поднесущей;
- начало или остановка кодирования радиопередачи.
Данная функция приводит к изменению параметров текущей передачи корректирующей информации.
7.2.2 Изменение параметров линии передачи данных
Адресат: ОС
RSIM сообщение: #10
Данное сообщение устанавливает параметры радиопередачи в ОС. Параметры ОС устанавливаются данным сообщением путем перезагрузки ОС, либо включения/выключения ОС. Сообщение устанавливает следующие параметры:
- частота радиопередачи;
- скорость передачи корректирующей информации в бодах;
- параметры кодирования радиопередачи;
- режим работы (модуляция данных, передача "пустого" сообщения RTCM #6, несущая) [7].
7.2.3 Запрос параметров линии передачи данных
Адресат: ОС
RSIM сообщение: #1-(10)
Сообщения используются для определения текущих параметров установки радиопередачи ОС. Запрашиваемые параметры идентичны приведенным в 7.2.2.
7.2.4 Обработка входных параметров линии передачи данных
Источник: ОС
RSIM сообщение: #10
Параметры радиопередачи передаются опорной станцией для КС посредством сообщения RSIM #10 и состоят из параметров, идентичных приведенным в 7.2.2.
КС необходима для обработки и отображения этих параметров.
7.2.5 Переустановка параметров опорной станции
Адресат: ОС
RSIM сообщение: #3
Сообщение определяет три типа переустановки параметров ОС:
- полная переустановка;
- частичная переустановка;
- программная переустановка DGPS и ДГЛОНАСС.
7.2.6 Изменение параметров опорной станции
Адресат: ОС
RSIM сообщение: #4, #6, #11, #22
Сообщения обеспечивают возможность изменения всех параметров ОС. Они содержат следующие параметры:
- выбор сообщения PRC (RTCM #1, #9-1, #9-3 и др.);
- источник частоты (внутренний, внешний);
- частота внешнего источника;
- эталонные координаты;
- угол радиовидимости спутников, для которых определены передаваемые поправки;
- идентификатор опорной станции.
Сигнальные пороги ОС:
- минимальное число спутников на слежении;
- максимальное значение поправки псевдодальности;
- максимальное значение скорости изменения псевдодальности;
- максимальный интервал времени получения данных от СИК.
7.2.7 Запрос параметров опорной станции
Адресат: ОС
RSIM сообщение: #1 - (#4, #6, #11, #22)
Функция используется для запроса установленных в ОС параметров, приведенных в 7.2.6.
7.2.8 Обработка входных параметров опорной станции
Источник: ОС
RSIM сообщение: #4, #6, #11, #22
Сообщения определяют параметры ОС при передаче их в КС при запросе или в предварительно заданном интервале времени. Параметры идентичны приведенным в 7.2.6.
7.2.9 Установка контроля состояния спутника
Адресат: ОС
RSIM сообщение: #8
Сообщение используется для игнорирования статуса состояния спутника в навигационном сообщении GPS и ГЛОНАСС. Оно используется для передачи в ОС информации о спутниках, которые:
- принудительно считаются нормально функционирующими;
- считаются неработающими;
- для каких спутников необходимо использовать навигационное сообщение GPS/ГЛОНАСС по установке их состояния.
7.2.10 Запрос опорной станции о состоянии спутника
Адресат: ОС
RSIM сообщение: #1-(#9)
Сообщения используются КС для запроса данных о статусе состояния всех спутников, передаваемых ОС:
- спутник определен как работоспособный;
- спутник определен как неработоспособный;
- навигационное сообщение GPS и ГЛОНАСС о состоянии спутников.
7.2.11 Обработка принимаемых сообщений о состоянии спутников
Источник: ОС
RSIM сообщение: #9
Сообщение отображает входные данные о состоянии спутников по запросу ОС или с заранее заданной дискретностью. Установки идентичны приведенным в 7.2.10.
7.2.12 Запрос состояния DGPS/ДГЛОНАСС
Адресат: ОС/СИК.
RSIM сообщение: #1-(#9, #13, #19)
Сообщение используется КС для запроса следующей оперативной информации от ОС и СИК:
- номера спутников, для которых в текущий момент ОС вырабатывает поправки;
- номера спутников, определенные опорной станцией как неработоспособные;
- номера спутников, наблюдаемые в текущий момент СИК;
- номера спутников, объявленные СИК как работоспособные.
7.2.13 Обработка входящих сообщений о состоянии DGPS/ДГЛОНАСС
Источник: ОС/СИК
RSIM сообщение: #9, #13, #19
Посредством этих сообщений КС обрабатывает следующую информацию о состоянии спутников, которая передается ОС или СИК:
- номера спутников, для которых в текущий момент опорной станцией вырабатываются поправки;
- номера спутников, объявленные опорной станцией неработоспособными;
- номера спутников, наблюдаемые в текущий момент СИК;
- номера спутников, объявленные СИК работоспособными.
Сравнивая сообщения RSIM #19(СИК) и RSIM #13(OC) КС может определить номера спутников, которые находятся на слежении и по которым вырабатываются поправки с учетом заданного угла радиовидимости.
Сравнение этих данных с прогнозируемыми номерами спутников на КС гарантирует, что ОС отслеживает все спутники, находящиеся выше заданного угла радиовидимости. Вариантом прогноза на КС является обработка данных сообщения RSIM #7, где нулевое значение C/N указывает номер спутника, находящийся выше горизонта, но который не отслеживается.
7.2.14 Запрос данных о слежении за спутниками
Адресат: ОС/СИК
RSIM сообщение: #1-(#7)
Сообщение предназначено для запроса данных о всех спутниках, которые находятся на слежении ОС или СИК. Сообщение запрашивает следующие данные:
- азимут спутника;
- угол возвышения спутника над горизонтом;
- отношение сигнал/шум;
- погрешность дальности потребителя;
- состояние эфемерид спутников GPS и ГЛОНАСС.
7.2.15 Обработка данных слежения за спутниками
Источник: ОС/СИК
RSIM сообщение: #7
Сообщение служит для отображения поступающих данных о спутниках, которые приведены в 7.2.14.
7.2.16 Запрос корректирующей информации
Адресат: ОС
RSIM сообщение: #1-(#13)
Сообщения предназначены для запроса данных о корректирующей информации по всем спутникам, которые находятся на слежении:
- поправки к псевдодальностям;
- поправки к скорости изменения псевдодальностей;
- ускорение псевдодальности (не обязательно);
- погрешности дифференциальной дальности потребителя;
- набора данных IOD;
- модифицированный Z-отсчет.
7.2.17 Обработка корректирующей информации
Источник: ОС
RSIM сообщение: #13
Сообщение служит для отображения корректирующей информации, поступающей от ОС и приведенной в 7.2.16.
7.2.18 Функция управления переустановкой параметров СИК
Адресат: СИК
RSIM сообщение: #3
Сообщение обеспечивает полную, частичную или программную переустановку параметров станции интегрального контроля.
7.2.19 Изменение параметров СИК
Адресат: СИК
RSIM сообщение: #6, #14, #16
Сообщения используются для установки следующих параметров в СИК:
- идентификационный номер наблюдаемой опорной станции;
- координаты - широта, долгота;
- высота над эллипсоидом;
- максимальное время устаревания поправок;
- наблюдаемая частота передачи;
- скорость передачи информации в бодах;
- кодирование (используется или не используется);
- сигнальные пороги и интервалы наблюдений;
- время устаревания поправок;
- процент ошибочных принятых сообщений MSK;
- уровень передаваемого сигнала;
- соотношение сигнал/шум;
- номера спутников;
- величина геометрического фактора (HDOP);
- погрешность горизонтальных координат;
- разность псевдодальностей;
- разность скорости изменения псевдодальностей (не обязательно);
- низкая точность дифференциальной дальности потребителя UDRE.
7.2.20 Запрос параметров СИК
Адресат: СИК
RSIM сообщение: #1 - (#6, #14, #16)
Сообщения служат для подтверждения, что параметры СИК, перечисленные в 7.2.19, запрашиваются контрольной станцией.
7.2.21 Обработка параметров СИК
Источник: СИК
RSIM сообщение: #6, #14, #16
Сообщения служат для отображения параметров СИК, приведенных в 7.2.19.
7.2.22 Запрос данных о характеристиках СИК
Адресат: СИК
RSIM сообщение: #1-(#18, #19)
Сообщения используются КС для запроса данных о состоянии DGPS/ДГЛОНАСС или полного кадра поправок от СИК, включая:
- разности псевдодальностей;
- разности скорости изменения псевдодальностей;
- показатель качества коррекции;
- оценку изменения псевдодальностей;
- время устаревания поправок;
- погрешности координат (широта, долгота, высота);
- величины PDOP, HDOP и VDOP;
- число спутников, использованных при решении навигационной задачи.
7.2.23 Обработка данных о характеристиках СИК
Источник: СИК
RSIM сообщение: #18, #19
Сообщения обеспечивают отображение данных о поправках, поступающих в СИК и приведенных в 7.2.22.
По этим данным вычисляется величина дисперсии.
Для непрерывного вычисления и отображения величин дисперсии сообщение непрерывно запрашивает значение разности псевдодальностей и оценку их дисперсии.
Значение дисперсии необходимо для оценки погрешности измерений и анализа сбоев в работе, так как она связана с взвешенными разностями.
7.2.24 Запрос состояния линии передачи данных
Адресат: СИК
RSIM сообщение: #1-(#15)
Посредством данных сообщений от СИК запрашиваются значения следующих параметров:
- уровень передаваемого сигнала;
- соотношение сигнал/шум;
- процент ошибочных сообщений;
- время устаревания поправок.
За исключением процента ошибочных сообщений, все параметры являются усредненными измерениями на заданном временном интервале наблюдений.
Процент ошибочных сообщений вычисляется на всем интервале наблюдений.
7.2.25 Обработка информации о состоянии линии передачи данных
Источник: СИК
RSIM сообщение: #15
Сообщение обеспечивает отображение информации о состоянии линии передачи данных, приведенной в 7.2.24.
7.2.26 Запрос последних принятых сообщений RTCM
Адресат: СИК
RSIM сообщение: #1-(#23)
Сообщения обеспечивают возможность КС запросить последнее или все принятые RTCM сообщения. Используются обычно для сообщений RTCM #3, #5, #7, #15 и #16 с целью проверки факта передачи дифференциальных поправок.
7.2.27 Обработка последних принятых сообщений RTCM
Источник: СИК
RSIM сообщение: #23
Сообщение служит для отображения RTCM сообщений: #1, #2, #3, #5, #7, #9, #15, #16, передаваемых в КС.
7.2.28 Обработка поступающих от ОС сигналов тревог
Источник: ОС
RSIM Сообщение: #12
Сообщение служит для отображения следующих сигналов тревоги, переданных опорной станцией:
- недостаточное число спутников на слежении;
- отсутствие подтверждения правильности передачи поправок от СИК (неконтролируемая радиопередача);
- превышение допустимых пределов поправок псевдодальностей;
- превышение допустимых пределов поправок скорости изменения псевдодальностей.
Когда каждое состояние сигналов тревоги отменяется, ОС посылает сообщение RSIM #12, которое КС также должна обработать.
7.2.29 Обработка сигналов тревоги от СИК
Источник: СИК
RSIM сообщение: #17
Сообщение служит для отображения следующих сигналов тревоги:
- большое время устаревания поправок RTCM;
- высокий процент ошибочных сообщений;
- низкий уровень передаваемого сигнала;
- низкое соотношение сигнал/шум;
- недостаточное количество наблюдаемых спутников;
- большое значение HDOP;
- большая погрешность горизонтальных координат;
- большая разность измерений псевдодальностей;
- большая разность измерения скорости изменения псевдодальностей (не обязательно);
- низкая точность погрешности дифференциальной дальности потребителя.
Это сообщение также передается при отмене сигналов тревог.
7.2.30 Запрос СИК о состоянии спутников
Адресат: СИК
RSIM сообщение: #1-(#9)
Сообщения служат для запроса следующих параметров по всем видимым спутникам:
- спутник принудительно принят работоспособным;
- спутник принудительно принят неработоспособным;
- навигационное сообщение GPS и ГЛОНАСС о состоянии эфемерид по всем видимым спутникам.
7.2.31 Обработка информации от СИК о состоянии спутника
Источник: СИК
RSIM сообщение: #9
Сообщение служит для отображения информации о состоянии спутников и статусе эфемерид в навигационном сообщении GPS и ГЛОНАСС, принятых СИК. Параметры идентичны приведенным в 7.2.30.
8 RSIM сообщения
RSIM сообщения обеспечивают стандартные форматы ввода - вывода данных для облегчения обмена информацией между ОС, СИК и КС вне зависимости от разработчика аппаратуры. С целью уменьшения сложности оборудования число сообщений должно быть по возможности наименьшим. Необходимо, чтобы одно и то же сообщение использовалось для различных функций аппаратуры. Использование сообщения может быть определено из его содержания.
8.1 Условные обозначения
Для определения RSIM сообщений применяются следующие условные обозначения.
Для морских радиомаяков используется ограниченное число RSIM сообщений, тем не менее, они допускают их использование в других приложениях. Сообщения RSIM обозначаются "RSIM #", сообщения RTCM SC104 обозначаются "RTCM #".
Форматы сообщений RSIM используют многие из обозначений, используемых в [7]. Этот стандарт идентичен стандарту [3].
NMEA 0183 обычно применяется для оборудования потребителя. Для RTCM принято мнемоническое обозначение из трех цифр "RCM", так что область адреса "$ PRCM" начинает каждое RSIM сообщение. Каждое RSIM сообщение заканчивается разделителем, контрольной суммой, и разделителем конца предложения (*hh<CR><LF>). В сообщениях RSIM поля времени UTC, широты и долготы сходны с [6]. Любое поле может быть заполнено нулями, если оно не требуется.
Исключения к замечаниям по протоколам формата данных NMEA составляют:
8.1.1 Максимальное число символов
Максимальное число символов в предложении может превышать 82. Это упрощает возможное увеличение размеров полей и устраняет ограничения размера поля, а также предоставляет возможность изменений внутри полей.
8.1.2 Повторяющиеся поля
Повторяющиеся поля, используемые в сообщениях RSIM #1, #22 и #23, отсутствуют в NMEA. Эта особенность сообщений RSIM означает, что число полей в предложении не может быть определено из типа сообщения, как в NMEA.
8.1.3 Контрольная сумма
В RSIM сообщениях требуется контрольная сумма, а в стандарте NMEA это не обязательно.
8.1.4 Числа с плавающей запятой
Нуль, в противоположность пробелам, требуется до или после десятичных запятых (например, "0.25", а не ".25", "15.0", а не "15.").
8.1.5 Нулевые поля
Нулевые поля должны быть отделены запятой в начале и в конце нулевого поля. Это особенно важно, когда используются произвольные поля. Нулевые поля должны быть отделены запятой в начале и в конце, за исключением последнего поля данных, которое отделено звездочкой (*).
8.1.6 Группирование сообщений RSIM
В сообщениях, которые передают данные для групп из трех спутников одновременно (RSIM #7, #13, #19), последнее сообщение может содержать данные для одного или двух спутников. Например, если данные пересылались для 8 спутников, последнее сообщение группы будет содержать данные для двух спутников, с заполнением оставшегося поля нулями.
8.2 Руководство по применению сообщений RSIM
В настоящем разделе приведены источники дополнительной информации, которые могут использоваться при разработке аппаратуры дифференциальной подсистемы.
8.2.1 Состояние спутника
Состояние спутника отображается в одном слове навигационного сообщения для спутников, находящихся в зоне видимости. Оно может отличаться от величин в словах "четыре" и "пять" для других спутников. Оценка состояния спутника приведена в [5].
Если опорная станция считает псевдошумовую последовательность нормальной, СИК автоматически ее использует.
Предположение ОС о ненормальной работе спутника исключает его из обработки до закладки сегментом управления GPS и ГЛОНАСС нового сообщения о состоянии спутников.
Сообщение RSIM о состоянии спутника эквивалентно сообщению RTCM #5. Состояние спутников в дифференциальной подсистеме определяется сообщением RSIM #8. Более подробную информацию о состоянии спутников можно получить с помощью сообщений RSIM #7 и #9.
Сообщение RSIM #7 индицирует передачу спутником его состояния в навигационном сообщении.
Информация о сбоях в отдельных псевдошумовых последовательностях может быть отмечена в ОС посредством необоснованно высокими поправками псевдодальности или скорости изменения псевдодальности и отражена в сообщении RSIM #12.
Затруднения в использовании дифференциальных поправок могут быть обнаружены в СИК и отражены в сообщении RSIM #17.
СИК должна непрерывно контролировать поправки каждого видимого спутника (RTCM #1 или #9), независимо от информации о принимаемых эфемеридах. Только сообщение RSIM #8 может объявить спутник неработоспособным.
8.2.2 Распределение времени
Установка интервалов для выдачи сообщений, архивирования данных и планирования радиопередач определяется возможностями дифференциальной подсистемы.
9 Методы испытаний
9.1 Правила испытаний
Методики испытаний должны соответствовать национальным стандартам, ГОСТ Р 52866, ГОСТ Р МЭК 60945.
Должна быть проведена оценка оборудования ККС на надежность (среднее время наработки на отказ и среднее время устранения неисправности), ремонтопригодность и требования к специальному оборудованию, безопасности.
9.2 Проверка параметров спутников
Проверка параметров спутников должна быть выполнена соответствующими установками при работе дифференциального режима GPS и ГЛОНАСС. Это испытание позволяет проверить работу ККС в условиях многолучевости, и должно проводиться периодически, в том числе после строительных или других подобных работ в зоне видимости антенны.
Для проверки спутника должны выбираться идентичные условия, включая геометрию спутников и условия многолучевости (наличие или отсутствие сильных отражателей и состояния поверхности моря). Лабораторный эталонный приемник ГНСС должен всегда контролироваться для проверки надлежащей работы спутников GPS и ГЛОНАСС.
9.3 Проверка имитатора
В дополнение к испытаниям ККС по реальным спутникам, должен использоваться имитатор спутниковых сигналов.
Как минимум должны быть проверены характеристики при аномальной работе систем GPS и ГЛОНАСС.
Этот метод может использоваться для проверки точности поправок псевдодальностей, скорости изменения псевдодальностей и дифференциальной ошибки дальности потребителя, передаваемых опорной станцией, а также решений навигационной задачи в СИК.
9.3.1 Точность псевдодальности
Испытания с помощью имитатора обеспечивают возможность определения точности измерений. С помощью имитатора точность измерения приемника может быть проверена независимо от режима работы системы, погрешностей модели распространения радиоволн, погрешностей космического сегмента систем GPS и ГЛОНАСС и сегмента управления.
Имитатор обеспечивает достаточный контроль характеристик приемника в различных условиях работы, включая наличие режима избирательного доступа, экстремальные электромагнитные условия, атмосферные условия и геометрию спутников, аномальные условия (такие как неисправное состояние спутников, сбои времени, смещение разрядных битов, погрешности эфемерид и плохую геометрию спутников). Эти условия упрощают оценку измерений ОС, вырабатываемых поправок, использования этих поправок на СИК и результатов решения навигационной задачи.
Имитаторы с более высокими характеристиками обеспечивают возможность управления каждым отдельным спутниковым каналом и должны использоваться при испытаниях. Чтобы убедиться, что процесс фильтрации, использованный в данном приемнике GPS или ГЛОНАСС, не влияет на способность приемника следить за динамикой псевдодальности, сигнал типа медленно изменяющейся синусоиды может быть добавлен к данной псевдодальности и он должен появиться на выходе приемника.
9.3.2 Многолучевость
Другая важная особенность, которая может быть проверена с помощью имитатора - способность приемника посредством обработки сигнала исключать интерференционные помехи за счет многолучевости. Это требует определения коэффициента усиления антенны и осевого отношения (коэффициента), наряду с промежуточной точкой между антенной и малошумящим усилителем для вывода имитируемого сигнала спутника.
9.3.3 Характеристики системы слежения
Приемники ГЛОНАСС/GPS/ГАЛИЛЕО на опорной станции, как и приемники ДГЛОНАСС/DGPS/ДГАЛИЛЕО на станции интегрального контроля, должны быть проверены на их способность обеспечивать слежение за сигналом имитатора в нормальных и неблагоприятных условиях.
Такими факторами являются:
- низкий уровень сигнала и низкое отношение сигнал/шум;
- большие смещения псевдодальности, экстремальные скорости изменения псевдодальности и ускорения псевдодальности;
- плохая геометрия спутников.
Должна быть проверена способность приемника обнаруживать, следить и повторно обнаруживать сигналы спутника при минимальной требуемой напряженности поля сигналов. ОС должна непрерывно следить за каждым спутником, для которого вырабатываются дифференциальные поправки, с тем, чтобы ОС могла обнаруживать сигналы спутников раньше, чем приемник потребителя. Оценка должна включать определение способности приемника первоначально или повторно обнаруживать сигналы спутника, следить за инициализацией системы, спутниковыми изменениями, выходами из строя, затенением радиосигнала (временное затенение антенны ГЛОНАСС GPS/ГАЛИЛЕО приемника).
9.3.4 Время предупреждения
Передача RTCM сообщений может быть использована для проверки СИК. Время предупреждения определяется измерением задержки между моментом передачи поправок, вышедших из доверительных пределов, и моментом появления сообщения RSIM #20 на опорной станции.
Время с учетом обработки должно составлять менее 1 с.
Местонахождение ложных предупреждений может быть обнаружено при контроле сообщения RSIM #20. Время предупреждения должно быть проверено в различных условиях работы приемников. Поправки могут выходить за доверительные пределы. Поведение поправок различно для разных источников ошибок:
- плохие эфемериды;
- чрезмерный дрейф опорного генератора опорной станции, спутника;
- мгновенное смещение опорного генератора опорной станции или спутника;
- чрезмерный шум опорного генератора опорной станции, спутника;
- выработка ошибочных поправок опорной станцией.
9.4 Блок проверки RSIM сообщений
Для надлежащей выработки и обработки RSIM сообщений требуется компьютер со специализированным программным обеспечением. Это обеспечит проверку способности ОС и СИК отвечать на сообщения RSIM.
9.5 Проверка выходной частоты
Для морского применения приемник и MSK модулятор должны быть проверены на соответствие спецификации сигнала, вырабатываемого MSK модулятором, а также чувствительность приемника к помехам, что зависит от соответствующих защитных соотношений для данного региона и локальных параметров окружающей среды.
9.6 Проверка точности дифференциальной дальности потребителя
Целью проверки точности выработки дифференциальной дальности потребителя на опорной станции является определение истинного значения этой дальности и проверке ее соответствия заявленным характеристикам.
Проверка может быть выполнена с использованием имитатора или реальных сигналов. Проверка может быть проведена с доверительной вероятностью 95% не более чем по 50 выборкам.
9.6.1 Испытания с помощью имитатора
При использовании имитатора должна использоваться методика испытаний. Истинная погрешность псевдодальности должна быть известна.
Программа испытаний включает известные уровни многолучевости и мощности сигнала GPS и ГЛОНАСС.
Оцениваемая величина UDRE может сравниваться со средней квадратической погрешностью и разностью между предвычисленной поправкой псевдодальности и известной погрешностью псевдодальности.
9.6.2 Испытания по реальным сигналам
Реальные сигналы могут наблюдаться опорной станцией и стационарным приемником, антенны которых расположены раздельно.
Неисправленные псевдодальности от приемника записываются и сравниваются с предварительно вычисленными псевдодальностями, основанными на фиксированном и известном положении антенны.
Оценка смещения часов вырабатывается с использованием идентичного алгоритма, который существует в опорной станции и вычитается из каждой разности, производя набор разностей.
СКП различия между этими разностями и поправками псевдодальностей, полученных от опорной станции, составляет погрешность дифференциальной дальности потребителя.
Вычислением СКП значения из достаточной выборки может быть проверено, что погрешность дифференциальной дальности потребителя находится в пределах требуемого процента от истинного значения с требуемой доверительностью.
Этот метод имеет следующие недостатки:
- СКП, вычисленная по данной методике, приведенной выше, включает шум приемника, и сравнение с погрешностью дифференциальной дальности потребителя должно компенсировать это увеличением допустимого порога;
- антенна потребителя должна быть размещена с учетом минимизации многолучевости. С другой стороны, допустимый порог должен корректироваться, чтобы учитывать это воздействие.
10 Реализация дифференциального режима работы ГНСС
В настоящем разделе приведена общая информация и указания по реализации и применению дифференциального режима ДГЛОНАСС/DGPS/ДГАЛИЛЕО.
10.1 Контрольная станция
Все аспекты стандарта RSIM были сформулированы с учетом предположения об использовании различных каналов связи для передачи данных о поправках. Поставщик услуг дифференциальной подсистемы должен выбрать канал связи с учетом места передачи и доступных способов связи. КС имеет возможность для установки параметров канала передачи корректирующей информации с помощью соответствующих портов опорной станции и СИК [10].
10.2 Опорная станция
Одной из наиболее важных функций, выполняемых опорной станцией, является формирование поправок псевдодальностей. В общем случае, вырабатываются относительные поправки, поскольку не требуется обеспечения абсолютного времени ОС.
Смещение часов является общим для всех поправок и, следовательно, входит в решение навигационной задачи потребителя. Требуется очень большое смещение часов, приблизительно 35 мкс, чтобы поместить поправки вне диапазона, выделенного для поправок в сообщении RTCM.
Индикатор качества поправок отражает качество источника частоты и алгоритмов обработки, использованных в ОС. Стабильность опорного генератора особенно важна в случае сообщения RTCM #9, где в условиях высокого шума пользователь может объединить поправки, которые были выработаны на интервале до 30 с.
Фактический дрейф опорного генератора может быть минимизирован с помощью источника с очень низким дрейфом частоты или скомпенсирован во время измерения поправок. Большинство разработок включает комбинацию обоих методов для получения требуемого качества поправок.
Опорные генераторы с низким дрейфом частоты также обеспечивают большую степень защиты при нарушении работы спутников, поскольку они допускают более длинный период времени для обработки и проверки времени GPS, ГАЛИЛЕО и ГЛОНАСС до коррекции опорного генератора. Моделирование этого дрейфа позволит выполнять это до снижения требований к источнику частоты.
Могут быть использованы различные методы передачи поправок. Могут использоваться сообщения RTCM #1 или RTCM #9. RTCM #1 допускает использование ОС с менее стабильным опорным генератором. RTCM #9 имеет преимущество при высокой скорости передачи (более чем 400 бит/с). Однако, при более низких скоростях передачи данных, использование RTCM #9 (исправление трех спутников одновременно) обеспечивает более высокие характеристики в условиях атмосферных шумов, более низком времени ожидания и более высокой устойчивости.
В стандарте предусмотрены несколько форматов передачи поправок:
- использование только формата RTCM #1;
- использование формата RTCM #9 группами по 3 в сообщении с остающимися спутниками, включенными в одно сообщение об одном или двух спутниках. Этот формат обозначен как RTCM #9-3;
- использование RTCM #9 с одним только спутником в сообщении. Этот формат обозначен как RTCM #9-1.
Если используется сообщение RTCM #2, сообщение RTCM #22 автоматически установит тип при обновлении эфемерид спутников.
10.2.1 Применение информации о целостности
Как показано на рисунке 1, СИК вырабатывает и посылает в ОС сигналы предупреждений наряду с обратной связью системы. Формируются два типа сигналов предупреждений - сигналы о координатах и сигналы о псевдодальностях.
Сигналы предупреждений о координатах вырабатываются, когда радиальная погрешность координат, вычисленная на СИК, превышает защитный порог за время, превышающее заданное. Когда ОС получает сигнал предупреждения о координатах, она устанавливает поле заголовка о состоянии станции в каждом сообщении для индикации нарушения нормальной работы. Сигнал предупреждения о псевдодальностях вырабатывается, когда вычисленные разности для данной псевдодальности превышают заданные пороги за время, превышающее заданное. После получения сигнала предупреждения о псевдодальности ОС устанавливает значения поправок в положение "не использовать" в соответствии с [5].
Это также снимает сигнал предупреждения о недостоверных координатах. В это время ОС производит переустановку фильтров слежения за псевдодальностями и выработки координат для данного спутника, затем производит повторный поиск сигнала спутника и передачу поправок. Одновременно СИК перезапускает следящие фильтры и производит повторный поиск сигнала спутника.
Сигнал предупреждения посылается в КС, если повторные попытки ОС выработать приемлемые поправки для данной псевдодальности закончились неудачей, КС может считать эту псевдодальность ошибочной. Рекомендуется, чтобы обратная связь системы между СИК и ОС осуществлялась, по крайней мере, каждые 3 с, чтобы гарантировать, что радиопередача надлежащим образом контролируется. Если ОС не получает сигнал обратной связи, это указывает на отсутствие контроля передачи корректирующей информации. Для индикации неконтролируемых условий работы используется код "110" в поле сообщения о состоянии станции в заголовке сообщения RTCM (биты 22-24).
10.2.2 Уменьшение многолучевости
Ошибки измерения псевдодальности от приемника до спутников систем GPS, ГАЛИЛЕО и ГЛОНАСС связаны с погрешностями многолучевости сигнала за счет поступления на вход приемника переотраженных сигналов от близко расположенных объектов и поверхностей.
Данные погрешности измерений не могут быть устранены с помощью дифференциальных поправок, потому что антенны при различном расположении подвержены различному воздействию многолучевости. Для повышения точности дифференциального режима необходимо принимать меры для устранения воздействия многолучевости сигналов.
10.2.2.1 Общее описание воздействий многолучевости
Увеличение погрешности определений координат за счет многолучевости сигналов вызывается воздействием на вход приемной антенны ГНСС ГЛОНАСС/GPS/ГАЛИЛЕО не только прямых сигналов от спутников, но и множеством переотраженных сигналов от морской поверхности, близкорасположенных объектов - сооружений, мачт, передающих и приемных антенн.
Переотраженные сигналы на входе приемника маскируют реальный пиковый уровень полезного сигнала. Уровень отраженного сигнала соизмерим с уровнем прямого сигнала, что приводит к существенным искажениям полезного сигнала, а, следовательно, к погрешностям в схемах слежения и измерительных цепях приемника. Эти погрешности во многом зависят от взаимного расположения спутника, приемной антенны и отражающих объектов.
Отраженные от сооружений, мачт и отражающих поверхностей сигналы приводят к увеличению погрешности измерения дальности до 15 м и более. Отражения могут вызывать погрешности в измерениях фазы кода, а разность длин пути распространения сигналов может достигать 1,5 длины чипа С/А кода, которая составляет 293 м.
Поэтому при размещении спутниковых антенн должны быть приняты меры, исключающие воздействие отраженных сигналов.
10.2.2.2 Методы уменьшения воздействий многолучевости
Ошибки, вызванные эффектом многолучевости в кодовых измерениях, частично устраняются путем использования узкостробового дискриминатора. Однако ошибки из-за многолучевости в фазовых измерениях могут быть устранены только применением антенн специальной конструкции. Речь идет о том, что типовая конструкция антенны в сочетании с устройством, гасящим отраженные от различных объектов сигналы спутников, способна значительно уменьшить влияние многолучевости на погрешность измерений.
Одним из важных параметров приемника ГНСС является динамическая характеристика. Приемники ГЛОНАСС/GPS/ГАЛИЛЕО разрабатываются с учетом стационарной их установки и использования в составе ККС. С целью уменьшения влияния отраженных сигналов на приемник ГЛОНАСС/GPS/ГАЛИЛЕО разработаны различные способы их уменьшения:
- использование специальных антенных экранов;
- выбор оптимального угла возвышения, обеспечивающего прием сигналов от спутников с минимальным воздействием отраженных сигналов;
- использование специальных алгоритмов обработки сигнала в приемнике, минимизирующих воздействие переотраженных сигналов на точность измерения дальности.
Необходимо, чтобы при сертификации ККС проводились измерения, включающие определение погрешности за счет многолучевости, которая должна быть в допустимых пределах.
10.2.2.3 Конфигурация и расположение антенны
Одним из способов уменьшения воздействия переотраженных сигналов является использование специальных антенных экранов. Использование рельефа местности, поглощающих материалов и защитных экранов снижает воздействия многолучевости посредством затухания отраженных сигналов. Эти методы могут уменьшить усиление сигналов на низких углах возвышения спутников над горизонтом, что приводит к снижению напряженности поля сигнала от спутника, проходящего над горизонтом.
При использовании специальной антенны типа "chock ring" путь отраженному сигналу преграждается специальным диском, который имеет в конструкции специальные дроссельные проточки, поглощающие возможные отражения. Применение такого диска увеличивает габаритные размеры антенн, однако позволяет производить установку антенн в более сложных с точки зрения переотражений местах использования.
Для подавления отраженных сигналов от вертикальных объектов и от поверхности используется альтернативный вариант устройства, имеющий преимущество по массогабаритным характеристикам и препятствующий поступлению отраженных сигналов на вход приемника.
Место расположения антенны должно также быть вдали от холмов, водных поверхностей, сооружений и других структур, подобно антенным вышкам, линиям электропередачи и железным дорогам. Антенна ГНСС должна быть установлена настолько близко к земле, насколько это возможно. Одним из предпочтительных методов является метод установки антенны на отдельном цилиндрическом постаменте на высоте до 1,5 м. Во многих практических ситуациях требуется мачта/башня высотой (3,0-3,5) м.
СИК не должна располагаться далеко от ОС для обеспечения сходных условий воздействия многолучевости сигналов.
Приемлемым считается разнос антенн СИК и опорной станции по горизонтали на 25 м. Чтобы гарантировать, что большая часть перерывов в приеме сигналов спутников является общей для антенн ОС и СИК, они должны быть размещены не ниже самого высокого препятствия в районе. После начального расположения антенны, кодовые и фазовые измерения должны быть проведены на каждой ОС в течение 24 ч и проанализированы перед окончательной установкой. Рекомендуется, чтобы эти измерения были выполнены также на СИК, чтобы минимизировать вероятность ложных предупреждений. Использование специальных антенн, узкополосных корреляторов, высокоточных сигналов Р-кода в ГНСС/GPS и ВТ-сигналов ГНСС ГЛОНАСС позволяет снизить погрешность измерений до 1 м.
10.3 Станция интегрального контроля
Качество сигнала дифференциальных поправок, принимаемых потребителями в пределах рабочей зоны, изменяется вследствие ослабления уровня сигналов поправок по мере удаления от ККС к границам рабочей зоны и увеличения уровня локальных шумов. Для мониторинга рабочей зоны может использоваться навигационная аппаратура потребителя. Дополнительно в рабочей зоне должен располагаться удаленный контрольный пункт.
Станция интегрального контроля должна размещаться в одном месте с опорной станцией.
10.3.1 Контроль MSK сигнала, передаваемого радиомаяком
Напряженность поля сигнала поправок и отношение сигнал/шум несущей частоты радиомаяка контролируется СИК путем измерений приемником уровня MSK сигнала. Напряженность поля сигнала поправок измеряется в дБ/мкВ/м, а отношение сигнал/шум в дБ. Эти значения сравниваются с порогами, которые устанавливаются сообщением RSIM #16. Интервалом наблюдений для этих параметров является отрезок времени, на котором измеренное значение должно быть ниже порога предупреждения, при котором вызывается сообщение RSIM #17.
10.3.2 Контроль передаваемых RTCM сообщений
Наличие атмосферных шумов в полосе частот радиомаяков, используемых для передачи корректирующей информации, или появления ошибок в процессе кодировки сообщений, поток передаваемых RTCM сообщений может содержать ошибки, которые вызывают прерывание передачи информации - данных RTCM [11].
Если ошибки появляются достаточно часто, качество RTCM сообщений и навигационные характеристики снижаются. Качество RTCM сообщений оценивается как процент ошибочных принимаемых сообщений, вычисляемых следующим образом.
Когда одно из тридцати разрядных слов в структуре сообщения не соответствует критерию, биты для всего сообщения также считаются "плохими". MER равно числу плохих информационных битов, деленному на общее число принятых битов информации.
Порог MER и интервал наблюдения устанавливаются сообщением RSIM #16. Интервалом наблюдения для оценки MER является промежуток времени длительностью от 60 до 1800 с. Значение параметра MER содержится в сообщении RSIM #15.
10.3.3 Контроль возраста поправок
Основным критерием для оценки точности дифференциальной подсистемы ГНСС ГЛОНАСС/GPS/ГАЛИЛЕО является возраст поправок, передаваемых в реальном масштабе времени. СИК непрерывно (два раза в секунду) сравнивает отметки времени последних принятых поправок (модифицированный Z-счет) с текущей оценкой времени GPS, ГАЛИЛЕО и ГЛОНАСС. Если эта оцениваемая величина превышает порог, установленный в сообщении RSIM #16 (поле 1), на интервале времени установленном в сообщении RSIM #16 (поле К), вырабатывается сигнал предупреждения (RSIM #17) и об этом сообщается посредством сообщения RSIM #17 (поле 3). "Средний возраст" поправок представляет собой среднюю разность между модифицированным Z-счетом каждой поправки и временем ГНСС для всех спутников, используемых в решении навигационной задачи.
10.3.4 Обнаружение ошибок псевдодальности
Важной функцией станции интегрального контроля является проверка целостности (достоверности) передаваемых поправок псевдодальностей. СИК должна использовать измерения псевдодальности по сигналам GPS, ГАЛИЛЕО и ГЛОНАСС, исправлять их полученными поправками и сравнивать эти исправленные дальности с предвычисленными по известным координатам СИК.
Кроме того, СИК при формировании поправок псевдодальностей должна учитывать уход частоты собственного опорного генератора и смещение метки времени.
Сигнал предупреждения появляется, если абсолютное значение разности псевдодальностей превышает порог, установленный сообщением RSIM #16 (поле "е"). Если условия появления сигнала сохраняются дольше установленного интервала наблюдения, включается сигнал тревоги.
Сбой в целостности происходит, если абсолютное значение разности псевдодальностей, деленное на UDRE, превышает отношение, данное в RSIM #16, (поле "i"), на интервале наблюдения, заданном в RSIM #16, (поле "j").
10.3.5 Значение порога разности псевдодальностей
Значение порога разности псевдодальностей устанавливается с целью обеспечения максимальной целостности псевдодальности для избежания высокой скорости ее изменения. Когда пороги установлены правильно, они могут быть превышены аномальными значениями псевдодальностей, поправками к псевдодальностям или многолучевостью принимаемых сигналов. Опытным путем установлено, что при использовании "специальной" ОС в условиях низкой многолучевости допускается установка порога времени 120 с, порога координат 30 и 80 см.
В типичных условиях многолучевости принимаемых сигналов устанавливается порог координат 80 см.
10.3.6 Индикатор качества принимаемых поправок
Показатель качества принимаемых поправок является средством оценки характеристик оборудования и поиска неисправностей. Он измеряется в реальном времени на СИК и также используется как параметр в определении характеристик ОС. Показатель не имеет соответствующего сигнала тревоги. Индикатор качества поправок () определяется по формуле
![]() ,
,
где - модифицированный Z-счет для поправки к псевдодальности на момент
;
- модифицированный Z-счет следующей поправки, полученной для того же спутника.
10.3.7 Обнаружение ошибок в измеренных координатах
Погрешность определения координат дифференциальной подсистемы ГНСС ГЛОНАСС/GPS/ГАЛИЛЕО оценивается СИК как окончательная проверка заявленных навигационных характеристик.
Станция интегрального контроля вычисляет координаты, используя измерения по сигналам систем ГЛОНАСС/GPS/ГАЛИЛЕО и принимаемые дифференциальные поправки. Измеренные координаты сравниваются с эталонными координатами СИК.
При расхождении координат формируется сообщение RSIM #18. Сигналы предупреждения о погрешности горизонтальных координат формируются путем вычисления радиальной погрешности и ее сравнения с пороговым уровнем, который установлен сообщением RSIM #16 (поле "с").
Сигнал тревоги включается, когда погрешность измеренных координат превышает этот порог в течение времени, установленного сообщением RSIM #16 (поле "d").
Метод вычисления координат на СИК определяется производителем оборудования.
Библиография
[1] Международная Конвенция по охране человеческой жизни на море, СОЛАС, Глава V. Безопасность мореплавания | |
[2] Рекомендации MC3-R.M.823 | Технические характеристики передачи дифференциальных поправок в глобальной навигационной спутниковой системе (ГНСС) в диапазоне частот морских радиомаяков 285-325 кГц |
[3] МЭК 61162-2 | Цифровые интерфейсы для судового навигационного и связного оборудования и систем |
[4] Стандарт RTCM.1.0 | Рекомендуемый стандарт для NAVSTAR/GPS. Опорная станция и станция интегрального контроля, версия 1.0 |
[5] Стандарт RTCM.2.3 | Дифференциальные поправки для ДГЛОНАСС/DGPS, версия 2.3 |
[6] Стандарт NMEA 0183 | Стандарт национальной морской ассоциации для сопряжения с внешним навигационным оборудованием |
[7] Резолюция ИМО MSC.233(82) | Принятие эксплуатационных требований к судовому приемному оборудованию системы ГАЛИЛЕО |
[8] Интерфейсный контрольный документ | Европейская ГНСС ГАЛИЛЕО. Открытая служба (OS) |
[9] ASCI Х3.15(5) | Американский национальный стандарт, устанавливающий правила передачи данных по последовательному порту |
[10] МСЭ - Т.V.28 | Стандарт, определяющий формат связей по порту RS 232 |
[11] МСЭ - Т.V.11 | Стандарт, определяющий формат связей по порту RS 422 |
Электронный текст документа
и сверен по:
, 2013
{kind=link}