ГОСТ 7217-87
Группа Е69
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины электрические вращающиеся
ДВИГАТЕЛИ АСИНХРОННЫЕ
Методы испытаний
Rotating electrical machines. Asynchronus motors. Test methods
МКС 29.160.30
ОКП 33 1150, 33 2000, 33 3000
Дата введения 1988-01-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством электротехнической промышленности
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 25.03.87 N 891
Изменение N 2 принято Межгосударственным советом по стандартизации, метрологии и сертификации (протокол N 19 от 24.05.2001)
За принятие изменения проголосовали:
Наименование государства | Наименование национального органа по стандартизации |
Азербайджанская Республика | Азгосстандарт |
Республика Армения | Армгосстандарт |
Республика Беларусь | Госстандарт Республики Беларусь |
Грузия | Грузстандарт |
Республика Казахстан | Госстандарт Республики Казахстан |
Кыргызская Республика | Кыргызстандарт |
Республика Молдова | Молдова-Стандарт |
Российская Федерация | Госстандарт России |
Республика Таджикистан | Таджикстандарт |
Туркменистан | Главгосслужба "Туркменстандартлары" |
Республика Узбекистан | Узгосстандарт |
Украина | Госстандарт Украины |
3. Стандарт полностью соответствует СЭВ СТ СЭВ 168-85
4. Стандарт полностью соответствует международным стандартам МЭК 34-1-83 и МЭК 34-2-72
5. ВЗАМЕН ГОСТ 7217-79
6. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение НТД, | Номер пункта, приложения |
ГОСТ 12.1.004-91 | 12.1 |
ГОСТ 12.3.019-80 | 12.1 |
ГОСТ 10169-77 | 9.1 |
ГОСТ 11828-86 | 1.3, 2.1, 6.1, 6.2, 8.1, 8.6, 8.7.1, 11.3.3, приложение 3 |
ГОСТ 11929-87 | Приложение 3 |
ГОСТ 12259-75 | Приложение 3 |
ГОСТ 14254-96 | Приложение 3 |
ГОСТ 15543.1-89 | Приложение 3 |
ГОСТ 16264.0-85 | Приложение 3 |
ГОСТ 16962.2-90 | Приложение 3 |
ГОСТ 20815-93 | Приложение 3 |
ГОСТ 25941-83 | 7.1, 7.3.1, 7.5, приложение 2 |
ГОСТ 27222-91 | 2.1 |
ГОСТ 27223-87 | 6.7 |
7. ИЗДАНИЕ (август 2003 г.) с Изменениями N 1, 2, утвержденными в декабре 1989 г., августе 2002 г. (ИУС 4-90, 11-2002)
Настоящий стандарт распространяется на асинхронные трехфазные двигатели без ограничения мощности, напряжения и частоты, а также однофазные асинхронные двигатели и двигатели специального исполнения в той мере, в которой методы испытаний, предусмотренные настоящим стандартом, применимы для испытаний этих двигателей.
Стандарт применим при проведении сертификационных испытаний асинхронных двигателей.
Стандарт устанавливает следующие методы испытаний:
измерение сопротивления обмоток при постоянном токе (разд.2);
определение коэффициента трансформации двигателей с фазным ротором (разд.3);
определение тока и потерь холостого хода (разд.4);
определение тока и потерь короткого замыкания, начального пускового вращающего момента и начального пускового тока (разд.5);
испытание на нагревание (разд.6);
определение рабочих характеристик, коэффициента полезного действия, коэффициента мощности и скольжения (разд.7);
определение кривой вращающего момента, значений максимального и минимального вращающих моментов (разд.8);
экспериментальное определение параметров схемы замещения с одним контуром на роторе (разд.9);
определение частотных характеристик (разд.10);
определение добавочных потерь (разд.11);
требования безопасности (разд.12).
Другие виды испытаний проводят по стандартам, указанным в приложении 3.
(Измененная редакция, Изм. N 1, 2).
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Стандарт не определяет объем испытаний, но если испытание проводят, то оно должно выполняться в полном соответствии с настоящим стандартом. Программы испытаний двигателей различных видов, периодичность их проведения, а также количество испытуемых двигателей указывают в стандартах или технических условиях на конкретные виды двигателей.
1.2. Напряжение источника питания должно быть практически симметричным и синусоидальным.
1.3. Измерительная аппаратура должна удовлетворять требованиям ГОСТ 11828.
Допускается определение мощности по измеренным величинам напряжения, тока и угла между ними.
Класс точности вольтметров для испытания электрической прочности изоляции обмоток должен быть не хуже 1,5.
1.2, 1.3. (Измененная редакция, Изм. N 1).
1.4. Перед испытаниями следует проверить качество сборки двигателя: затяжку болтов, винтов и гаек, свободное вращение ротора, маркировку выводов, отсутствие видимых следов загрязнений и влаги.
Необходимость измерения величины и симметрии воздушного зазора при различных видах испытаний, а также методики измерений следует указывать в стандартах или технических условиях на конкретные виды двигателей. Если двигатели оснащены трансформаторами тока, глухоподключенными к обмотке статора, испытания следует выполнять при закороченных и заземленных обмотках трансформаторов.
1.5. При проведении опытов холостого хода, короткого замыкания, при определении рабочих характеристик и испытаниях на нагревание следует измерять три линейных напряжения, три линейных тока, частоту сети и подводимую мощность. Если источник питания обеспечивает отклонение линейных напряжений не более 1% от среднего значения, то допускается измерять одно ближайшее к среднему значению напряжение. За линейное напряжение и линейный ток принимается среднее арифметическое трех измеренных значений. Мощность измеряется по схеме одного, двух или трех ваттметров. В случае применения двух ваттметров коэффициент мощности рекомендуется проверить по зависимости
 ,
,
где - большее показание, принимаемое положительным;
- меньшее показание с учетом знака.
(Измененная редакция, Изм. N 1).
1.6. При обработке и представлении результатов испытаний допускается выражать параметры в относительных единицах, принимая за базисные единицы номинальный ток, номинальное напряжение, номинальную синхронную частоту вращения. Значения момента и мощности допускается выражать в долях номинальных.
1.7. Для двигателей на несколько частот вращения испытания по разд.2-11, на кратковременную перегрузку по току и моменту, определение расхода охлаждающего воздуха, измерение вибрации и уровня шума следует производить для каждой частоты вращения. При приемосдаточных испытаниях допускается измерять вибрацию на одной частоте вращения с максимальной вибрацией. Указанную частоту вращения определяют при приемочных или периодических испытаниях. Измерение сопротивления изоляции обмоток относительно корпуса и между обмотками, испытание изоляции обмоток относительно корпуса, между обмотками и междувитковой изоляции на электрическую прочность следует производить для каждой независимой обмотки. Испытания при повышенной частоте вращения производят для наибольшей частоты вращения. Определение динамического момента инерции ротора, испытания на стойкость к механическим и климатическим воздействиям проводят с обмоткой, соединенной в схему для любой частоты вращения. В случае наличия требований следует измерить напряжения на отключенных выводах обмоток статора в режимах холостого хода, короткого замыкания и при номинальной нагрузке.
(Измененная редакция, Изм. N 1).
1.8. При приемосдаточных испытаниях двигателей, выполненных на номинальную частоту 60 Гц, допускается определять ток и потери холостого хода, ток и потери короткого замыкания, производить измерение вибрации при частоте 50 Гц. Измеренные значения должны сравниваться со значениями, полученными дополнительно при частоте 50 Гц, при приемочных, периодических или квалификационных испытаниях этих двигателей, выполненных на частоту 60 Гц. Допускается пересчитывать результат измерения вибрации пропорционально частоте.
2. ИЗМЕРЕНИЕ СОПРОТИВЛЕНИЯ ОБМОТОК ПРИ ПОСТОЯННОМ ТОКЕ
2.1. Измерение сопротивление обмоток при постоянном токе - по ГОСТ 11828. При измерении сопротивлений, меньших 1 Ом, не допускается применение одинарных мостов при всех видах испытаний, кроме приемосдаточных испытаний двигателей мощностью до 100 кВт, причем в этом случае следует применять одинарные мосты с четырехзажимной схемой включения, обеспечивающие точность измерения, соответствующую приборам класса 0,5. Сопротивление обмоток ротора в двигателях с фазным ротором следует измерять на контактных кольцах. При испытаниях на нагревание допускается измерять сопротивление обмотки статора при работающем двигателе без отключения его от сети по ГОСТ 27222 при обеспечении необходимой точности.
Измерение сопротивления обмотки в холодном и нагретом состояниях рекомендуется проводить с использованием одной и той же измерительной схемы с теми же приборами.
(Измененная редакция, Изм. N 1, 2).
3. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ТРАНСФОРМАЦИИ ДВИГАТЕЛЕЙ
С ФАЗНЫМ РОТОРОМ
3.1. Для определения коэффициента трансформации двигателей с фазным ротором следует подвести напряжение к обмотке статора двигателя при неподвижном роторе и разомкнутой его обмотке и измерить линейные напряжения на зажимах обмоток статора и на кольцах ротора. Для двигателей с номинальным напряжением до 660 В включительно при всех видах испытаний, кроме приемосдаточных, к обмотке статора необходимо подводить номинальное напряжение. При приемосдаточных испытаниях, а также для двигателей с номинальным напряжением выше 660 В при любых испытаниях допускается определять коэффициент трансформации при пониженном напряжении.
Измерение проводят для одного линейного напряжения. По измеренному линейному напряжению определяют фазное напряжение. Отношение фазных напряжений статора и ротора принимается за значение коэффициента , определяемого по формуле
 ,
,
где - фазное напряжение обмотки статора, В;
- фазное напряжение обмотки ротора, В.
4. ОПРЕДЕЛЕНИЕ ТОКА И ПОТЕРЬ ХОЛОСТОГО ХОДА
4.1. Определение тока и потерь холостого хода следует проводить в режиме ненагруженного двигателя при установившемся тепловом состоянии частей испытуемого двигателя (в частности, подшипниковых узлов). Если невозможно непосредственное определение температуры подшипниковых узлов, то двигатель до начала испытания следует вращать без нагрузки в течение времени, указанного в табл.1.
Таблица 1
| Продолжительность вращения, мин | ||||||
Мощность двигателя, кВт | при всех видах испытаний двигателей | при приемосдаточных испытаниях двигателей | |||||
| До | 1 | 10 | 5 | |||
Св. | 1 | " | 10 | 30 | 15 | ||
" | 10 | " | 100 | 60 | 30 | ||
" | 100 | " | 1000 | 120 | 60 | ||
" | 1000 | 180 | 90 | ||||
При механизированном и автоматизированном процессе испытаний двигателей, а также при массовом производстве двигателей с подшипниками качения допускается при проведении приемосдаточных испытаний уменьшить время, указанное в табл.1, для двигателей с высотами оси вращения:
до 132 мм - до 1 мин,
св. 132 до 250 мм - до 3 мин,
" 250 " 355 мм - до 5 мин.
При этом потери холостого хода определяют с учетом зависимости мощности холостого хода от времени обкатки, полученной при приемочных, периодических или типовых испытаниях по табл.1.
При проведении опыта холостого хода следует измерить линейные напряжения, линейные токи статора, частоту и подводимую мощность. Предпочтительнее измерять мощность тремя малокосинусными ваттметрами. В схемах непосредственного измерения мощности, в случае отсутствия малокосинусных ваттметров, возможно включение по схеме двух ваттметров, при котором обмотку напряжения третьего ваттметра включают между теми фазами, в которые включены обмотки тока двух других ваттметров.
При изменениях в цепях двигателей малой мощности следует, в случае необходимости, учитывать потребление тока в обмотках напряжения ваттметров и в вольтметрах по формуле
![]() .
.
Значение коэффициента мощности определяют по формуле
 ,
,
где - мощность по показаниям ваттметров, Вт;
- потери в обмотках ваттметров и в вольтметрах, Вт;
- сопротивление обмотки напряжения ваттметра, Ом;
- сопротивление обмотки вольтметра, Ом;
- напряжение при опыте, В;
- измеренный ток (среднее значение из трех измеренных), А.
В двигателях с фазным ротором обмотку ротора замыкают накоротко на выводах ротора или на кольцах, если двигатель имеет короткозамыкатель колец.
(Измененная редакция, Изм. N 1, 2).
4.2. Опыт холостого хода следует выполнять постепенным понижением приложенного к статору напряжения, начиная с наибольшего значения, равного 130% номинального, и кончая возможно более низким, при котором еще наблюдается возрастание тока статора. Если ток при напряжении 130% номинального превышает номинальное значение, наибольшее напряжение может быть снижено, но не должно быть менее 110% номинального. При проведении опыта рекомендуется производить 9-11 отсчетов при различных значениях напряжения.
Непосредственно после опыта холостого хода следует измерить сопротивление обмотки статора между двумя линейными выводами. Для двигателей, имеющих при номинальном напряжении ток холостого хода выше 70% номинального, измерение сопротивления обмотки статора следует производить после снятия точки при номинальном напряжении и в конце опыта или после снятия каждой точки.
(Измененная редакция, Изм. N 1).
4.3. По данным опыта следует определить коэффициент мощности холостого хода
 ,
,
где - линейное напряжение холостого хода, В;
- линейный ток холостого хода, А;
- потери холостого хода, кВт.
Потери холостого хода необходимо разделить на потери в обмотке статора и сумму потерь в стали
и механических
. Потери в обмотке статора
в кВт определяют по формуле
![]() ,
,
где - сопротивление обмотки статора, Ом, между двумя линейными выводами, измеренное в конце опыта или после каждого отсчета.
Если сопротивление измеряется 2 раза, то результат, полученный в конце опыта, используют для выделения механических потерь, а результат, полученный после отсчета при номинальном напряжении, используют для определения потерь в стали.
Разделение суммы потерь в стали и механических на отдельные составляющие производят по зависимости этой суммы от квадрата приложенного напряжения. В случае, если учтены потери в приборах, вышеуказанная сумма равна ![]() .
.
Величину механических потерь определяют путем экстраполяции нижней прямолинейной части этой зависимости на нулевое значение приложенного напряжения.
Результаты опыта следует представить в виде функциональных зависимостей тока потерь
и коэффициента мощности
![]() от напряжения
от напряжения в табличной или графической форме.
Если частота при снятии характеристики холостого хода отличается от номинальной, но не более чем на ±5%, то измеряемые величины должны быть приведены к номинальной частоте. Измеренные значения напряжения пересчитываются пропорционально первой степени частоты, потери в стали - пропорционально частоте в степени 1,5 и механические потери - пропорционально квадрату частоты.
Если при определении потерь в стали напряжение, приведенное к номинальной частоте, отличается от номинального, но не более чем на ±5%, то потери в стали, приведенные к номинальной частоте, пересчитывают пропорционально квадрату напряжения.
(Измененная редакция, Изм. N 1, 2).
4.4. При приемосдаточных испытаниях допускается определять ток и потери холостого хода только при номинальном напряжении.
(Измененная редакция, Изм. N 1).
5. ОПРЕДЕЛЕНИЕ ТОКА И ПОТЕРЬ КОРОТКОГО ЗАМЫКАНИЯ,
НАЧАЛЬНОГО ПУСКОВОГО ВРАЩАЮЩЕГО МОМЕНТА
И НАЧАЛЬНОГО ПУСКОВОГО ТОКА
5.1. Ток и потери короткого замыкания определяют из опыта короткого замыкания.
Начальный пусковой вращающий момент и начальный пусковой ток определяют из опыта короткого замыкания, из опытов пуска или снятия кривой момента по разд.8.
За начальный пусковой вращающий момент принимается наименьшее значение вращающего момента, а за начальный пусковой ток - наибольшее значение пускового тока из измеренных различными методами.
5.2. Опыт короткого замыкания следует выполнять при заторможенном роторе (обмотка ротора двигателей с фазным ротором должна быть накоротко замкнута на кольцах). Перед затормаживанием ротора должно быть проверено направление вращения двигателя методом пробного включения. К обмотке статора двигателя подводят практически симметричное напряжение номинальной частоты. В процессе опыта одновременно измеряют линейные напряжения, линейные токи, подводимую мощность, а для двигателей мощностью до 100 кВт и вращающий момент. Непосредственно после отключения измеряют сопротивление обмотки статора между двумя линейными выводами. Подводимую мощность рекомендуется измерять по схеме двух ваттметров или трехфазным ваттметром. Если источник питания обеспечивает отклонение линейных напряжений не более 1%, то допускается измерять два линейных тока и одно линейное напряжение.
Вращающий момент при опыте короткого замыкания измеряют динамометром, весами или торсиометром. При измерении вращающего момента ротор должен быть заторможен в таком угловом положении, при котором пусковой момент минимален. Это положение определяется путем 8-10 измерений момента при напряжении, указанном в табл.2, при различных угловых положениях ротора. Для двигателей мощностью свыше 100 кВт вращающий момент при опыте короткого замыкания измеряют или рассчитывают по электромагнитной мощности (п.5.4).
Таблица 2
Номинальное напряжение двигателя, В | Напряжение короткого замыкания, В |
127 | 33 |
220 | 58 |
380 | 100 |
440 | 115 |
500 | 130 |
660 | 173 |
3000 | 800 |
6000 | 1600 |
10000 | 2640 |
5.1, 5.2. (Измененная редакция, Изм. N 2).
5.3. Опыт короткого замыкания следует начинать в практически холодном состоянии машины или после опыта холостого хода. Двигатель включают на напряжение, указанное в табл.2, и производят первый отсчет.
Для двигателей, номинальные напряжения которых отличаются от указанных в табл.2, напряжение короткого замыкания следует определять по формуле*
![]()
________________
* Письмом Росстандарта от 16.08.2021 г. N 2990-ОГ/03 разъясняется, что "В формуле в п.5.3 ГОСТ 7217-87 допущена опечатка". Следует читать: ![]() . - .
. - .
Второй отсчет проводят при напряжении (100±10)% номинального для двигателей мощностью до 100 кВт (=50 Гц) и не менее 40% номинального для двигателей мощностью до 100 кВт (
50 Гц) и для двигателей мощностью свыше 100 кВт. При этом рекомендуется включить двигатель на напряжение меньше вышеуказанного, затем напряжение быстро поднять до требуемого значения. При испытании двигателей мощностью выше 100 кВт и вертикальных двигателей после снятия отсчета при наивысшем напряжении следует измерить сопротивление обмотки статора.
Остальные 3-5 отсчетов выполняют при разных значениях подводимого напряжения. Отсчеты по приборам при каждом значении подведенного напряжения производят за время не более 10 с во избежание чрезмерного нагрева обмотки током короткого замыкания.
Сразу после отсчета двигатель отключают.
Для двигателей мощностью до 100 кВт рекомендуется для определения пускового момента снять точку в нагретом состоянии при температуре, близкой к рабочей при номинальном напряжении. Эту точку можно не снимать, если пусковой момент определяют по статической кривой момента. Для двигателей мощностью свыше 100 кВт допускается измерять пусковой момент в холодном состоянии.
При испытаниях короткозамкнутых двигателей мощностью свыше 1000 кВт (если определение пускового тока проводят из опыта пуска) ток короткого замыкания должен быть не менее 2-кратного от номинального. Для двигателей с фазным ротором при построении круговой диаграммы ток короткого замыкания должен быть не менее 2,5-кратного от номинального.
5.4. Коэффициент мощности короткого замыкания определяют по формуле
 ,
,
где - линейное напряжение короткого замыкания, В;
- линейный ток короткого замыкания, А;
- подводимая мощность короткого замыкания, кВт.
Результаты опыта следует представить в виде зависимостей тока потерь
, коэффициента мощности
![]() и момента
и момента от напряжения
в табличной или графической форме.
Для двигателей мощностью свыше 100 кВт вращающий момент при коротком замыкании в Н·м определяют по формуле
![]() ;
;
где - синхронная частота вращения, мин
;
=0,9 - коэффициент, учитывающий возможное уменьшение
, обусловленное добавочными потерями;
- электромагнитная мощность, кВт;
![]() ,
,
где - потери в обмотке статора, кВт, при опыте короткого замыкания;
- потери в стали, кВт, взятые из опыта холостого хода при напряжении, равном напряжению короткого замыкания.
Потери в обмотке статора в кВт при опыте короткого замыкания определяют по формуле
![]() ,
,
где - сопротивление обмотки статора, Ом, при постоянном токе, измеренное между линейными выводами непосредственно после снятия точки короткого замыкания при наибольшем токе.
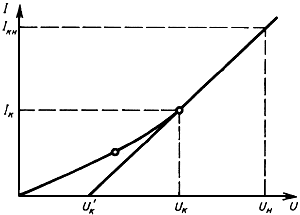
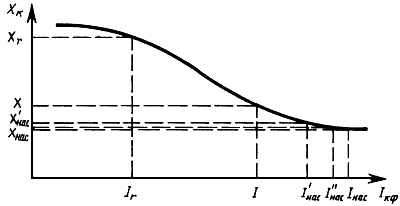
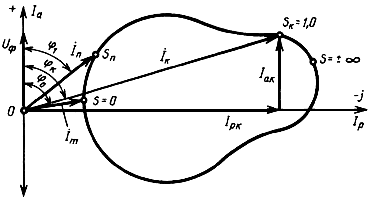
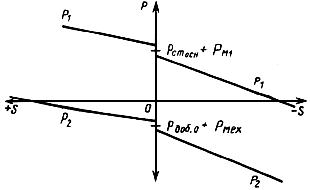
Если опыт короткого замыкания при номинальном (или близком к нему) напряжении не проводился, то для определения тока и вращающего момента при номинальном напряжении вводят поправку на насыщение путей потоков рассеяния, которая состоит в том, что дальнейшее возрастание тока короткого замыкания предполагается по касательной к кривой (черт.1), изображающей зависимость тока от напряжения.
Черт.1
Ток короткого замыкания при номинальном напряжении, называемый начальным пусковым током, определяют по формуле
 ,
,
где и
- соответственно наибольшие ток, А, и напряжение, В, по кривой (черт.1);
- номинальное напряжение, В;
- напряжение, В, соответствующее отрезку, отсекаемому на оси абсцисс касательной к кривой, изображающей зависимость тока от напряжения (черт.1).
Начальный пусковой вращающий момент при коротком замыкании , соответствующий номинальному напряжению, определяют по формуле
 ,
,
где - вращающий момент, Н·м, измеренный или рассчитанный при наибольшем напряжении опыта короткого замыкания.
(Измененная редакция, Изм. N 1, 2).
5.5. При приемосдаточных испытаниях ток и потери короткого замыкания определяют только при напряжении, указанном в табл.2 или отличающемся от указанного в табл.2 не более чем на ±15% с последующим приведением результатов к регламентированному значению напряжения. При этом ток пересчитывают пропорционально первой степени напряжения, а мощность - пропорционально квадрату напряжения.
6. ИСПЫТАНИЕ НА НАГРЕВАНИЕ
6.1. Испытание на нагревание следует проводить методом непосредственной нагрузки при номинальном напряжении и номинальной отдаваемой мощности или номинальном токе по ГОСТ 11828.
Для двигателей мощностью свыше 100 кВт и вертикальных машин допускается проводить испытания методом непосредственной нагрузки при номинальном напряжении и токе меньшем номинального, при пониженном напряжении и токе, близком к номинальному, а также методом двух частот или методом наложения постоянного тока.
(Измененная редакция, Изм. N 1).
6.2. Условия проведения испытания, методы и средства измерения температуры - по ГОСТ 11828. Измерения температуры бандажей и контактных колец производят после остановки двигателя или во время его работы, если это возможно. Для оценки температуры элементов ротора допускается применение термокрасок, если температура при пуске не превышает температуру в установившемся режиме. Для двигателей мощностью до 100 кВт при проведении испытаний методом непосредственной нагрузки температура обмотки ротора может быть оценена по изменению скольжения в холодном и нагретом состояниях. Для уменьшения погрешности рекомендуется производить пуск двигателя со стороны нагрузочной машины. Превышение температуры обмотки ротора ![]() , °С, определяется по формуле
, °С, определяется по формуле
![]() ,
,
где - скольжение, измеренное в нагретом состоянии машины;
- скольжение, измеренное в холодном состоянии машины;
- температурный коэффициент сопротивления материала обмотки в диапазоне температур от 0 до 100 °С. Для медных обмоток принимается 1/
=235; при применении обмоток из других материалов величина дроби 1/
определяется подстановкой температурного коэффициента сопротивления для данного материала;
- температура окружающей среды при опыте определения
;
- температура окружающей среды при опыте определения
.
Допускается определять превышение температуры обмотки ротора по измеренному активному сопротивлению рабочего контура схемы замещения с одним контуром на роторе. Способ определения этого сопротивления указан в разд.9.
(Измененная редакция, Изм. N
2).
6.3. Испытание непосредственной нагрузки при номинальном напряжении и токе меньшем номинального следует проводить при токах и
. Значение тока
определяют по формуле
![]() ,
,
где - ток холостого хода. А, при номинальном напряжении;
- номинальный ток, А.
По результатам этих испытаний следует определить превышение температуры обмотки статора. Потери в обмотке статора , кВт, определяют по формуле
![]() ,
,
где - сопротивление обмотки статора, Ом, измеренное между двумя линейными выводами при испытании на нагревание;
- ток статора, А.
По результатам испытаний при и
следует определить линейную зависимость превышения температуры обмотки статора от потерь в обмотке статора
.
![]() ;
;![]() ;
;![]() ,
,
где и
- превышение температуры обмотки статора,
, и потери в обмотке статора, кВт, при токе
;
и
- превышение температуры обмотки статора,
, и потери в обмотке статора, кВт, при токе
.
Превышение температуры обмотки статора при номинальном токе определяется по формуле
 ,
,
где ![]() - потери в обмотке статора, кВт, рассчитанные для номинального тока и сопротивления, приведенного к температуре окружающей среды при опыте
- потери в обмотке статора, кВт, рассчитанные для номинального тока и сопротивления, приведенного к температуре окружающей среды при опыте .
Превышение температуры стали статора следует определять по формуле
![]() ,
,
где и
- величины, определенные по измеренным превышениям температуры стали в двух вышеуказанных режимах.
Аналогично могут быть найдены превышения температуры других частей машины.
(Измененная редакция, Изм. N 1, 2).
6.4. Испытание методом непосредственной нагрузки при токе, близком к номинальному и пониженном напряжении допускается проводить на двигателях с током холостого хода не более 0,4 номинального при скольжении, не превышающем критического. При этом следует провести три тепловых режима: при пониженном напряжении и токе, близком к номинальному (не менее 0,9 номинального); при пониженном напряжении и холостом ходе; при номинальном напряжении и холостом ходе. По данным первых двух режимов следует определить по п.6.3 коэффициент , далее, используя третий опыт, -
, потом - превышение температуры обмотки статора
, а затем - превышение температуры стали статора
.
(Измененная редакция, Изм. N 2).
6.5. Испытание на нагревание методом двух частот (черт.2) проводят на холостом ходу при питании от источника основной частоты, обеспечивающего номинальное напряжение двигателя, и от дополнительного источника питания частотой на 5-10 Гц меньше основной с напряжением, обеспечивающим эффективное значение суммарного измеряемого тока равное номинальному. Испытуемый двигатель следует запустить от источника основной частоты, установить частоту дополнительного источника на 5-10 Гц меньше основной, а затем регулировать напряжение дополнительного источника до получения номинального тока.
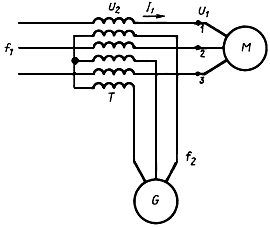
- испытуемый двигатель;
- последовательный трансформатор;
- дополнительный генератор;
- линейное напряжение на выводах двигателя;
- частота основного источника питания
(номинальная частота); - ток статора двигателя;
- дополнительное напряжение питания;
- частота дополнительного источника питания; 1, 2, 3 - точки подсоединения вольтметра,
амперметра и ваттметра
Черт.2
Метод может применяться также для машин с фазным ротором как для обмотки статора, так и для обмотки ротора. На машинах, в которых нагрев ротора существенно влияет на нагрев статора (например, с охладителями вида "воздух-воздух"), может быть получен завышенный результат.
Примечания:
1. Направления следования фаз основного и дополнительного источника должны быть одинаковы.
2. Обычно напряжение дополнительного источника составляет 10-20% напряжения основного источника.
3. При наличии в качестве основного источника питания синхронного генератора с 6 выводными концами последовательный трансформатор может быть включен в нейтраль основного источника питания. При этом снижаются требования к изоляции последовательного трансформатора.
4. При наличии дополнительного генератора с шестью выводными концами и номинальными током и напряжением не меньшими, чем у испытуемой машины, испытание может быть выполнено без последовательного трансформатора. При этом дополнительный генератор включается между основным источником питания и испытуемым двигателем как вольтодобавочный.
5. В качестве источника основной частоты следует использовать либо синхронный генератор, либо несколько параллельно соединенных синхронных генераторов.
В первом случае мощность, во втором - суммарная мощность должны быть не менее чем в 2 раза больше мощности испытуемого асинхронного двигателя.
Применение индукционных регуляторов не рекомендуется.
6.5а. Испытание методом эквивалентной нагрузки (метод модуляции частоты) проводят на холостом ходу при питании двигателя от источника переменного тока, частота которого модулируется вокруг среднего значения.
Двигатель погружается вследствие повторяющихся ускорений и замедлений, поскольку частота увеличивается, а затем уменьшается.
Источником модулированного питания может быть генератор переменного тока с низкой частотой возбуждения :
![]() ,
,
где - амплитуда модуляции частоты, Гц;
- частота модуляции, Гц;
- время, с.
Выходная частота генератора определяется уравнением
![]() ,
,
где - частота, определяемая вращением вала.
Средняя величина момента рассчитывается по формуле
![]() ,
,
где - момент инерции двигателя;
- амплитуда вариации угловой частоты.
При синусоидальной модуляции максимальное мгновенное значение момента равно:
![]() .
.
Максимальное мгновенное значение момента при модуляции должно быть ниже максимального момента двигателя для того, чтобы двигатель работал на устойчивой части нагрузочной характеристики. Этот метод наиболее пригоден для двигателей с высокой инерцией, поскольку чем выше инерция, тем меньше требуется амплитуда модуляции и частота (обычно 1-2 Гц). Для двигателей с малой инерцией может возникнуть необходимость повысить инерцию при помощи дополнительной маховой массы на валу.
Двигатель пускается от генератора переменного тока при напряжении основной частотой с амплитудой и частотой модуляции равными нулю. Амплитуда модуляции и частота затем увеличиваются до получения тока статора, равного полному номинальному нагрузочному току. Ток возбуждения генератора устанавливается так, чтобы получить номинальное напряжение статора.
(Введен дополнительно, Изм. N 2).
6.6. Испытание методом наложения постоянного тока проводят на холостом ходу при соединении обмотки статора испытуемого двигателя в звезду с выведенной нейтральной точкой. В качестве источника переменного тока применяют синхронный генератор, который имеет обмотку статора, соединенную в звезду с выведенной нейтральной точкой, и обеспечивает номинальное напряжение при токе, близком к номинальному току двигателя. Между нейтральными точками включают источник постоянного тока на ток, близкий к 3-кратному значению номинального тока (черт.3). Синхронный генератор равной (или большей) мощности и напряжения включают непосредственно или через трансформатор стержневого типа; в последнем случае необходимая мощность генератора определяется лишь потерями в испытуемом двигателе и трансформаторе.
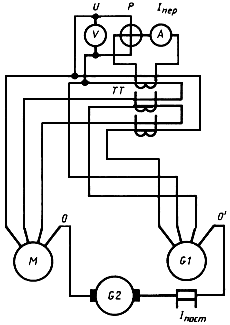
- испытуемый двигатель;
- источник питания переменного тока;
- источник питания
постоянного тока; 0, 0' - нулевые выводы обмотки; - трансформаторы тока
Черт.3
Для измерений применяются трансформаторы тока шинного типа, при этом первичный ток образуется суммой токов двух фаз - одного в прямом, другого в обратном направлении. В результате измеряется переменный ток, равный тока фазы.
При тепловом режиме со стороны питания переменным током измеряют три тока, три мощности и со стороны питания постоянным током - потребляемый ток. Последний выбирают таким образом, чтобы суммарный ток был равен заданному.
 ,
,
где - переменный ток, А, равный среднему из трех показаний;
- постоянный ток, А, измеренный при опыте.
Проводят не менее двух тепловых режимов при номинальных напряжениях на холостом ходу (=0) и при токе
, равном номинальному.
Превышение температуры обмотки статора при токе определяется по формуле, содержащей поправку на потери в контурах ротора в режиме испытания и при работе под непосредственной нагрузкой
![]() ,
,
где - измеренное превышение температуры обмотки статора,
, в режиме при токе
;
,
- разность температур выходящего и входящего охлаждающего воздуха,
, в режимах холостого хода и при токе
;
и
- мощности, кВт, измеренные при холостом ходе и при токе
, среднее по трем ваттметрам;
- потери в контурах роторах, кВт, при токе
, определенные методами, указанными в п.7 настоящего стандарта;
![]() - высокочастотные добавочные потери, кВт, при данном токе, определенные экспериментально по п.11;
- высокочастотные добавочные потери, кВт, при данном токе, определенные экспериментально по п.11;
![]() - потери в обмотке статора, кВт, определяемые током
- потери в обмотке статора, кВт, определяемые током ;
- сопротивление одной фазы обмотки статора, Ом, измеренное после теплового режима при токе
.
Аналогично определяется превышение температуры сердечника статора. В случае, если ток статора при этом испытании менее номинального, то превышения температур обмотки статора и сердечника статора могут быть определены по п.6.3.
(Измененная редакция,
Изм. N 2).
6.7. Определение превышения температуры обмоток статора и ротора в зависимости от времени при номинальном напряжении и заторможенном роторе следует проводить по ГОСТ 27223.
7. ОПРЕДЕЛЕНИЕ РАБОЧИХ ХАРАКТЕРИСТИК, КОЭФФИЦИЕНТА ПОЛЕЗНОГО
ДЕЙСТВИЯ, КОЭФФИЦИЕНТА МОЩНОСТИ И СКОЛЬЖЕНИЯ
7.1. Под рабочими характеристиками понимают зависимости подводимой мощности, тока, момента, скольжения, коэффициента полезного действия (КПД) и коэффициента мощности от отдаваемой мощности при номинальных значениях напряжения и частоты.
Определение - по ГОСТ 25941.
(Измененная редакция, Изм. N 1).
7.2. Рабочие характеристики двигателей мощностью до 100 кВт следует определять из опытов непосредственной нагрузки при номинальном напряжении, для двигателей мощностью от 100 до 1000 кВт допускаются отклонения напряжения от номинального не более чем на ±10%.
Для двигателей мощностью выше 1000 кВт, вертикального исполнения, двигателей на частоту отличную от 50 Гц, а также при отсутствии необходимого оборудования, допускается определять рабочие характеристики из опытов непосредственной нагрузки при пониженном напряжении, по схемам замещения с одним контуром на роторе, по частотным характеристикам (см. разд.10), по круговым диаграммам (см. приложение 2).
7.3. Рабочие характеристики снимают при 5-10 значениях нагрузки в пределах от 110-130% номинальной до холостого хода при температуре обмоток, близкой к рабочей. Сначала снимают отсчеты при нагрузке, близкой к номинальной, затем при других значениях нагрузки, начиная от максимальной. При определении КПД непосредственным способом напряжение должно быть равно номинальному.
При снятии рабочих характеристик следует измерять частоту, линейные напряжения и токи, подводимую мощность и скольжение, а при определении КПД непосредственным способом дополнительно следует измерять момент или отдаваемую мощность с помощью тарированной вспомогательной машины. Линейный ток измеряют тремя амперметрами, подводимую мощность - по схеме двух ваттметров, трехфазным ваттметром или по схеме трех ваттметров. При использовании схемы двух ваттметров для контроля целесообразно определить коэффициент мощности по п.7.5 и по отношению показаний двух ваттметров (п.1.5). Сходимость результатов свидетельствует о правильности измерений.
7.3.1. Скольжение двигателя следует определять одним из следующих способов:
1) стробоскопическим. Для этого на валу двигателя наносят метки, число которых равно числу пар полюсов. Освещая вал стробоскопической лампой, питаемой от той же сети, что и испытуемый двигатель, измеряют время прохождения определенного количества меток мимо неподвижного указателя, считая прохождение метки в момент пуска секундомера за нулевое;
2) при помощи индуктивной катушки. Катушку размещают у торца двигателя, предварительно определив положение, при котором стрелка гальванометра совершает наиболее заметные качания и измеряют время определенного количества колебаний;
3) по частоте тока ротора. В цепь фазного ротора двигателя с постоянно налегающими щетками включают шунт, к которому подсоединяют милливольтметр магнитоэлектрической системы с нулем в середине шкалы и измеряют время определенного числа периодов качаний стрелки.
Скольжение определяют по формуле
![]() ,
,
где - число прохождения меток мимо указателя или число полных колебаний стрелки прибора (
10-20);
- длительность опыта, с;
- частота источника питания испытуемого двигателя, Гц.
Допускается определять скольжение по приборам, предназначенным для измерения частоты вращения или скольжения, обеспечивающим определение скольжения с погрешностью, не превышающей 5%. Дополнительная нагрузка, создаваемая такими устройствами, не должна превышать 1% полезной мощности.
При необходимости измеренные значения скольжений приводятся к расчетной рабочей температуре обмотки статора по формуле
 ,
,
где - скольжение при расчетной рабочей температуре
, °С;
- скольжение, измеренное при температуре опыта
, °С;
- температурный коэффициент сопротивления материала обмотки.
Расчетная рабочая температура - по ГОСТ 25941 в соответствии с классом изоляции обмотки статора двигателя.
(Измененная редакция, Изм. N 2).
7.3.2. При измерении момента следует использовать динамометры. Рекомендуется выбирать динамометр таким образом, чтобы полная шкала динамометра не превышала номинальный момент двигателя более чем в три раза. Допускается измерять вращающий момент на статоре испытуемого двигателя, подвешенного между валом нагрузочной машины и вращающимся центром или в люльке, соосной с валом нагрузочной машины, качающейся в собственных подшипниках. Рекомендуется определить поправку на момент по формуле
![]() ,
,
где - мощность, кВт, потребляемая испытуемым двигателем при вращении ненагруженного динамометра (невозбужденной нагрузочной машины) или установленного в люльке двигателя при вращении невозбужденной нагрузочной машины;
- мощность, подводимая к испытуемому асинхронному двигателю на холостом ходу, кВт;
- частота вращения испытуемого двигателя с ненагруженным динамометром, мин
;
- показания динамометра или весового устройства при вращении испытуемым двигателем ненагруженного динамометра или невозбужденной нагрузочной машины, Н·м.
Значение момента определяют по формуле
![]() ,
,
где - измеренное значение момента.
(Измененная редакция, Изм. N 1).
7.4. Определение рабочих характеристик из опытов непосредственной нагрузки при пониженном напряжении допустимо для двигателей, у которых ток холостого хода не превышает 40% номинального.
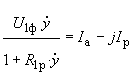
7.4.1. Если при снятии рабочих характеристик напряжение отличается от номинального не более чем на 20%, измеренные значения тока и подводимой мощности приводят к номинальному напряжению следующим образом
![]() ,
, ,
, ,
,![]() ,
,
где ,
,
,
,
,
![]() - напряжение, скольжение, подводимая мощность, ток холостого хода и ток при нагрузке, коэффициент мощности при напряжении
- напряжение, скольжение, подводимая мощность, ток холостого хода и ток при нагрузке, коэффициент мощности при напряжении ;
,
,
,
,
![]() - аналогичные величины при номинальном напряжении.
- аналогичные величины при номинальном напряжении.
Допускается приведение тока статора к номинальному напряжению графическим способом в соответствии с черт.4.
![]()
(на черт.4 и
- углы между векторами напряжения и тока при пониженном и номинальном напряжениях).
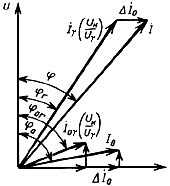
Черт.4
7.4.2. Если напряжение отличается от номинального более чем на 20%, то пересчет следует производить по п.7.6.
7.5. Обработку результатов измерений следует производить следующим образом.
Коэффициент мощности вычисляют по формуле
 ,
,
где - подводимая мощность, кВт;
- номинальное линейное напряжение, В;
- линейный ток, А.
При определении непосредственным методом КПД в % вычисляют по формуле
![]() ,
,
где - отдаваемая мощность, кВт, определенная по измеренному моменту и частоте вращения, либо по данным измерений на тарированной вспомогательной машине;
- подводимая мощность, кВт.
При определении методом отдельных потерь КПД в % вычисляют по формуле
![]() ,
,
где ![]() - сумма потерь,
- сумма потерь,
где - потери в обмотке статора, кВт;
![]() ,
,
где - линейный ток, А;
- сопротивление, Ом, между двумя линейными выводами обмотки статора, измеренное непосредственно после опыта при температуре, соответствующей данной нагрузке. Если сопротивление или температура обмотки не измерялись, то
, измеренное в холодном состоянии машины, приводится к расчетной рабочей температуре по ГОСТ 25941;
,
- потери в стали и механические, кВт, определенные из опыта холостого хода;
- потери в контурах ротора, кВт, вычисляемые по формуле
![]() ,
,
где - скольжение.
Для двигателей с фазным ротором эта формула учитывает и потери в щеточном контакте.
- добавочные потери в кВт определяют по п.11.3 настоящего стандарта и ГОСТ 25941.
Отдаваемую мощность определяют как разность между подводимой мощностью
и суммой всех потерь
.
Вращающий момент в Н·м вычисляют по формуле
![]() ,
,
где - частота вращения, мин
.
Рабочие характеристики представляют в табличной либо в графической форме. Допускается представлять рабочие характеристики в функции от подводимой мощности.
(Измененная редакция, Изм. N 1, 2).
7.6. Расчет по схемам замещения с одним контуром на роторе следует производить по форме 4 приложения 1. Параметры схем замещения следует определять по формам 1-3 приложения 1. Параметры намагничивающего контура берутся при номинальном напряжении, параметры рабочего контура - при пониженном. Расчеты по схемам замещения с параметрами, определенными при пониженном напряжении, могут применяться только для машин с относительным током холостого хода не более 0,4.
7.7. При определении действительных потерь и КПД добавочные потери находят по п.11.3, а потери в обмотке статора вычисляют по току и сопротивлению, измеренным при номинальном режиме работы.
8. ОПРЕДЕЛЕНИЕ КРИВОЙ ВРАЩАЮЩЕГО МОМЕНТА, ЗНАЧЕНИЙ
МАКСИМАЛЬНОГО И МИНИМАЛЬНОГО ВРАЩАЮЩИХ МОМЕНТОВ
8.1. Кривая вращающего момента может быть определена одним из перечисленных способов:
1) путем нагрузки и непосредственного измерения вращающего момента по ГОСТ 11828;
2) путем нагрузки и измерения электрической мощности нагрузочной машины по ГОСТ 11828;
3) путем нагрузки и измерения подводимой мощности к двигателю;
4) построением кривой момента из опыта пуска ненагруженного двигателя по ГОСТ 11828;
5) построением кривой момента из опыта пуска по подводимой мощности по ГОСТ 11828;
6) по данным опыта трехфазного короткого замыкания при различных частотах;
7) путем измерения момента в опыте трехфазного короткого замыкания при различных частотах;
8) по частотным характеристикам разд.10.
9) по круговой диаграмме (максимальный момент, приложение 2). Рекомендуется определять кривую момента при номинальном напряжении. Для двигателей мощностью свыше 100 кВт, а также двигателей на частоту отличную от 50 Гц, допускается определять кривую момента при пониженном напряжении, но не менее 40% номинального. Если при этом напряжение не менее 75% номинального, то момент пересчитывается по квадрату напряжения. При напряжении, меньшем 75% номинального, для пересчета к номинальному напряжению рекомендуется произвести учет насыщения по п.8.3.5 или определить показатель степени зависимости момента от напряжения, который может отличаться от 2 и вычисляется по нескольким (не менее 2) кривым вращающего момента, снятым при нескольких напряжениях.
Определение кривой вращающего момента двигателей мощностью до 100 кВт следует производить на двигателе, нагретом примерно до температуры номинального режима.
(Измененная редакция, Изм. N 1, 2).
8.2. При определении момента по подводимой мощности момент в Н·м при скольжении
вычисляют по формуле
 ,
,
где - синхронная частота вращения, мин
;
- измеренные потери в меди статора, кВт;
![]() - добавочные потери, кВт, основной частоты при номинальном токе, измеренные по п.11.3.3.
- добавочные потери, кВт, основной частоты при номинальном токе, измеренные по п.11.3.3.![]() - высокочастотные добавочные потери, кВт, при номинальном токе, измеренные по п.11.3.3.
- высокочастотные добавочные потери, кВт, при номинальном токе, измеренные по п.11.3.3.
8.3. Определение кривой момента из опыта трехфазного короткого замыкания при различных частотах.
8.3.1. При выполнении опыта трехфазного короткого замыкания двигатель следует закрепить на фундаментной плите, а ротор затормозить с помощью тормозного устройства, рассчитанного на максимальный момент двигателя. В качестве источника питания следует использовать трехфазный синхронный генератор с приводным двигателем, обеспечивающим регулирование частоты вращения и частоты тока до 2-5% номинальной. Наименьшее значение частоты тока не должно превышать ![]() .
.
Генератор и приводной двигатель должны иметь принудительные системы охлаждения. Недопустимо применение тиристорных устройств для возбуждения синхронного генератора. Напряжение питания в процессе испытаний должно изменяться пропорционально частоте. Для этого достаточно поддерживать неизменным ток возбуждения синхронного генератора.
8.3.2. Опыт короткого замыкания при различных частотах выполняют в следующем порядке. Собирают измерительные схемы, аналогичные схемам при опыте короткого замыкания. Установив номинальную частоту и постепенно поднимая напряжение, следует убедиться в правильности направления вращения и надежности закрепления двигателя и тормозного устройства.
Подняв напряжение питания до выбранного значения, но не ниже установленного в табл.2, следует измерить частоту питания , линейные токи
и напряжения
, подводимую мощность
![]() и ток возбуждения генератора, после чего отключить двигатель и измерить сопротивление обмотки статора между двумя фазами
и ток возбуждения генератора, после чего отключить двигатель и измерить сопротивление обмотки статора между двумя фазами .
В диапазоне частот 50-10 Гц повторяют измерения при 4-5 значениях частоты питания и токе возбуждения генератора, равном току возбуждения при первом опыте.
При частотах ниже 10 Гц использование измерительных трансформаторов тока и напряжения, стрелочных приборов нецелесообразно. Измерения рекомендуется выполнять с использованием специальных шунтов и аналого-цифровых преобразователей средств вычислительной техники или других средств, обеспечивающих необходимую точность. Допускается применение осциллографирования. При 5-6 значениях частоты измеряют фазные напряжения и токи, угол между векторами напряжения и тока. Порядок выполнения опытов остается прежним.
8.3.3. По данным измерений вычисляют входные сопротивления неподвижной машины
 ;
; ;
;![]() ;
;
и сопротивления вращающегося двигателя, соответствующие скольжению ![]()
 ;
;![]() ;
;![]() ;
;![]() ,
,
где - сопротивление фазы обмотки статора, Ом, при постоянном токе, приведенное к расчетной рабочей температуре.
8.3.2, 8.3.3. (Измененная редакция, Изм. N 2).
8.3.4. Пусковые характеристики без учета насыщения вычисляют по формулам
![]() ,
,![]() ,
,![]() ,
,![]() .
.
8.3.5. Пусковые характеристики с учетом насыщения определяются следующим образом. По п.8.4 находится ток статора с учетом насыщения ![]() . Момент с учетом насыщения определяется по формуле
. Момент с учетом насыщения определяется по формуле

8.3.6. Для двигателей с подшипниками качения величину вращающего момента можно определить путем непосредственного измерения с помощью динамометра или торсиометра. Измеренные значения момента при различных значениях и
![]() соответствуют моменту двигателя при скольжении
соответствуют моменту двигателя при скольжении ![]() и напряжении
и напряжении ![]() .
.
Момент при номинальном напряжении вычисляют по формуле п.8.3.5.
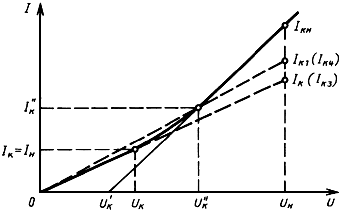
8.4. Влияние насыщения путей потоков рассеяния на величину индуктивного сопротивления и ток статора могут быть учтены по данным опыта короткого замыкания при номинальной частоте. Для этого вычисляют значения индуктивного сопротивления короткого замыкания при разных токах.
и определяют зависимость от тока ![]() (черт.5)
(черт.5)
Черт.5
Исходными данными для определения насыщенного значения тока статора при номинальном значении напряжения при данном скольжении являются измеренные величины
![]() ,
, ![]() ,
, ![]() . По этим величинам определяют сопротивления
. По этим величинам определяют сопротивления
![]() ,
,
![]() ,
,![]() .
.
В опыте трехфазного короткого замыкания ![]() ,
,
![]() и
и ![]() .
.
Ток при номинальном напряжении без учета насыщения равен
![]() .
.
По токам и
находят насыщенное значение индуктивного сопротивления
![]() в первом приближении по черт.5.
в первом приближении по черт.5.
![]() .
.
По найденному значению ![]() и величине
и величине ![]() находят
находят ![]() и значение тока статора при номинальном напряжении с учетом насыщения в первом приближении
и значение тока статора при номинальном напряжении с учетом насыщения в первом приближении ![]() . Далее находят корректированное значение
. Далее находят корректированное значение ![]() и второе приближение тока
и второе приближение тока ![]() . Расчет повторяют до тех пор, пока новое значение тока будет отличаться от предыдущего не более чем на 2%. Найденное значение тока следует принять за значение тока статора при номинальном напряжении с учетом насыщения
. Расчет повторяют до тех пор, пока новое значение тока будет отличаться от предыдущего не более чем на 2%. Найденное значение тока следует принять за значение тока статора при номинальном напряжении с учетом насыщения ![]()
.
8.5. Определение максимального момента
Максимальный момент может быть определен методами по п.8.1 (1-9) и по схеме замещения с одним контуром на роторе.
8.5.1. Максимальный момент по схеме замещения черт.6 следует определять по форме 4 приложения 1. Расчет производят для скольжения
 .
.
8.6. Определение минимального момента
Минимальный момент следует определять методами по п.8.1 (1, 2, 4), а также с помощью тарированной асинхронной машины по ГОСТ 11828.
Если минимальный момент, особенно при наличии явновыраженных синхронных провалов, определен при пониженном напряжении, то для пересчета его к номинальному напряжению рекомендуется определить показатель степени зависимости минимального момента от напряжения. Для этого следует определять минимальный момент при нескольких (не менее 2) напряжениях и вычислить показатель степени, который обычно больше 2.
8.7. Испытание на кратковременную перегрузку по вращающему моменту
8.7.1. Испытание на кратковременную перегрузку по вращающему моменту проводят по ГОСТ 11828 в тех случаях, когда это записано в технической документации или если значение максимального момента, определенное в соответствии с требованиями настоящего стандарта, не превышает 1,7 номинального для обычных двигателей и 1,6 номинального для двигателей с пониженным пусковым током (не более 4,5-кратного значения номинальной силы тока).
8.7.2. Нагрузку увеличивают постепенно до значений, соответствующих 1,6 и 1,5 номинального значения момента.
8.7.3. Двигатель считают выдержавшим испытание, если он без остановки или резкого изменения частоты вращения выдерживает вращающий момент, соответственно превышающий номинальный на 60 или 50% в течение не менее 15 с.
8.7-8.7.3. (Введены дополнительно, Изм. N 1).
9. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ
СХЕМЫ ЗАМЕЩЕНИЯ С ОДНИМ КОНТУРОМ НА РОТОРЕ
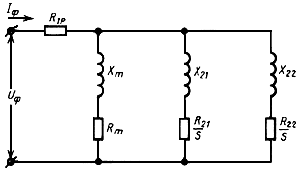
9.1. При обработке результатов испытаний, указанных в настоящем разделе, применяется схема замещения с намагничивающим контуром, вынесенным за активное сопротивление фазы статора (черт.6). Допускается применение -образной схемы. При этом индуктивное сопротивление рассеяния обмотки статора определяется по ГОСТ 10169.
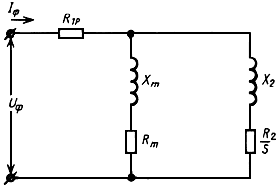
Черт.6
Параметры намагничивающего контура схемы замещения определяются из опыта холостого хода. Параметры рабочего контура определяются из опыта нагрузки при номинальном или пониженном напряжении, из опыта короткого замыкания при пониженной частоте, опытов холостого хода при пониженном напряжении и короткого замыкания при номинальной частоте.
(Измененная редакция, Изм. N 2).
9.2. При расчете параметров намагничивающего контура по данным опыта холостого хода при данном напряжении используют намагничивающий ток ![]() потери в стали статора и активное сопротивление фазы обмотки статора. При низких напряжениях намагничивающий ток определяется по касательной к кривой
потери в стали статора и активное сопротивление фазы обмотки статора. При низких напряжениях намагничивающий ток определяется по касательной к кривой ![]() , проходящей через начало координат, потери в стали определяются по разд.4.
, проходящей через начало координат, потери в стали определяются по разд.4.
Расчет производится по форме 1 приложения 1 для номинального напряжения и напряжения, при котором производились опыты для определения параметров рабочего контура: нагрузки, короткого замыкания при пониженной частоте, холостого хода при пониженном напряжении и короткого замыкания при номинальной частоте.
9.3. Для определения параметров рабочего контура из опыта нагрузки проводится опыт нагрузки при номинальном или пониженном напряжении при номинальном токе, скольжение при этом не должно превышать критического. Измеряют напряжение, ток, подводимую мощность, скольжение и сопротивление обмотки статора. По измеренным величинам по форме 2 приложения 1 определяют параметры рабочего контура. В случае, если опыт проводился при пониженном напряжении, параметры намагничивающего контура для расчетов по форме 2 должны браться при том же напряжении.
9.4. При определении параметров рабочего контура из опыта короткого замыкания при пониженной частоте проводится опыт короткого замыкания при частоте 5 Гц и номинальном токе. Для повышения точности определения рабочих характеристик рекомендуется выбирать частоту питания из условия ![]() ;
;
где - высота стержня или расстояние между верхней кромкой верхнего стержня и нижней кромкой нижнего стержня для роторов с двойной клеткой, мм;
- коэффициент, равный отношению удельного сопротивления материала обмотки и удельного сопротивления меди.
При опыте измеряют напряжение, ток, подводимую мощность, частоту и сопротивление обмотки статора. Расчет параметров производят по форме 3 приложения 1.
(Измененная редакция, Изм. N 2).
9.5. Определение параметров рабочего контура из опытов холостого хода при пониженном напряжении и опыта короткого замыкания при номинальной частоте
Путем плавного уменьшения напряжения при холостом ходе определяют минимальное напряжение, при котором двигатель еще работает устойчиво. Далее при этом напряжении измеряют ток, подводимую мощность, скольжение и сопротивление обмотки статора. Затем снимают две точки короткого замыкания при номинальной частоте - при номинальном токе и при токе, равном току предыдущего опыта холостого хода. Измеряют те же величины.
Расчет параметров рабочего контура производят по форме 2 приложения 1. Индуктивное сопротивление, соответствующее номинальному току статора, вычисляют по формуле
![]() ,
,
где ![]() - значение
- значение при опыте холостого хода, Ом, рассчитанное по форме 2;
![]() - реактивное сопротивление короткого замыкания, Ом, при номинальном токе;
- реактивное сопротивление короткого замыкания, Ом, при номинальном токе;
![]() - реактивное сопротивление короткого замыкания. Ом, при токе, равном току холостого хода в предыдущем опыте.
- реактивное сопротивление короткого замыкания. Ом, при токе, равном току холостого хода в предыдущем опыте.
10. ОПРЕДЕЛЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
10.1. Под частотной характеристикой понимается зависимость комплексных значений тока статора от скольжения при номинальных значениях частоты и напряжения.
10.2. Частотная характеристика может быть получена из опытов:
непосредственной нагрузки при номинальном напряжении;
пуска двигателя, сопряженного с устройством с большим моментом инерции;
трехфазного короткого замыкания при различных частотах;
непосредственной нагрузки при пониженном напряжении.
Для вычисления рабочих и пусковых характеристик частотная характеристика может быть получена по данным трех опытов:
холостого хода ();
короткого замыкания (![]() );
);
нагрузки (![]() ), причем для определения нагрузочной точки могут быть использованы все методы, указанные в разд.7.
), причем для определения нагрузочной точки могут быть использованы все методы, указанные в разд.7.
Для определения рабочих характеристик рекомендуется определять частотную характеристику либо по двум точкам:
холостого хода ();
нагрузки (![]() ), либо по трем, добавив к первым двум точку при
), либо по трем, добавив к первым двум точку при ![]() .
.
Примечание. - скольжение при номинальной нагрузке,
- промежуточное значение скольжения.
10.3. Активная и реактивная
составляющие частотной характеристики (черт.7) связаны с параметрами схем замещения (черт.6, 8) для любого скольжения соотношениями
 ,
,
где - фазное номинальное напряжение, В;
- сопротивление фазы обмотки статора, Ом, при постоянном токе, приведенное к расчетной рабочей температуре;
- полная проводимость, См, двухконтурной схемы замещения двигателя за активным сопротивлением обмотки статора, определяемая по формуле
![]() .
.
Черт.7
Параметры схемы замещения ,
, активную
и реактивную
проводимости определяют по формулам, приведенным в п.10.4.
10.4. По данным п.10.2 для скольжений ,
![]() ,
, ![]() определить полные
определить полные , активные
, и реактивные
проводимости схемы замещения.
 ,
,
где - фазное напряжение в опытах, В;
- сопротивление фазы обмотки статора, Ом, во время опытов;
![]() - токи статора, А, измеренные во время опытов.
- токи статора, А, измеренные во время опытов.
Проводимости ,
, См, можно также найти по формулам:
![]() ,
,![]() ,
, ,
,![]() ,
,
где ![]() .
.
Мощность и ток
должны соответствовать режиму идеального холостого хода, когда
![]() ,
, ![]()
10.2-10.4. (Измененная редакция, Изм. N 1).
10.5. Вычислить полные проводимости контуров ротора для скольжений ![]() и
и ![]()
![]() ,
,![]() .
.
10.6. Определение количества роторных контуров схемы замещения
Вычислить коэффициенты
![]() ;
; ![]() ;
;![]() ;
; ![]() ;
;
![]() ;
;![]() ;
;![]() .
.
Если ![]() , то схема замещения имеет не менее двух роторных контуров, если
, то схема замещения имеет не менее двух роторных контуров, если , то схема замещения имеет один роторный контур.
(Измененная редакция, Изм. N 1).
10.7. Параметры схемы замещения с одним роторным контуром
![]() ;
;![]() ;
; ;
; ;
;
10.8. Параметры двухконтурной схемы (черт.8)
Черт.8
,
- определяют по п.10.7
![]() ,
, =1, 2;
![]() ,
,
где коэффициенты и
определяют по формулам:
![]() ;
;![]() ;
; ;
; ,
,
либо вычисляют итерационным методом по циклической схеме
 ;
; ;
; ;
; ;
; ;
; .
.
В первом цикле ![]() . Для получения постоянных значений
. Для получения постоянных значений и
достаточно 50-100 циклов. Допускается для вычисления
,
применение других методов.
10.9. Полную проводимость для любого скольжения ротора для одноконтурной схемы замещения рассчитывают по формуле
![]() ,
,
для двухконтурной схемы
![]() .
.
10.8, 10.9. (Измененная редакция, Изм. N 1).
10.10. Составляющие частотной характеристики и
находят по п.10.3. Значения
принимают по одной из формул п.10.9 в зависимости от принятой по п.10.6 схемы замещения.
Частотная характеристика может быть рассчитана с помощью следующих зависимостей:
![]() ,
,![]() ,
,![]() ,
,![]() .
.
10.11. Допускается определять частотные характеристики более чем по трем точкам с увеличением числа контуров ротора. В этом случае параметры схемы замещения следует определять из системы уравнений
![]() ,
,
где =1, 2 ... - индексы исходных точек частотной характеристики.
10.12. Пусковые и рабочие характеристики следует определять по частотной характеристике с использованием метода отдельных потерь по формулам, приведенным ниже.
Модуль полного тока, А.
![]() .
.
Коэффициент мощности
![]() .
.
Подводимая мощность, кВт
![]() .
.
Далее расчет проводят по разд.7 или разд.8.
Частотную, рабочие и пусковые характеристики рекомендуется рассчитывать с переменным шагом по скольжению .
11. ОПРЕДЕЛЕНИЕ ДОБАВОЧНЫХ ПОТЕРЬ
11.1. Добавочные потери делятся на добавочные потери холостого хода ![]() и добавочные потери при нагрузке
и добавочные потери при нагрузке . Первые входят в потери в стали, определяемые из опыта холостого хода, вторые представляют сумму добавочных потерь основной частоты
и высокочастотных добавочных потерь от высших гармоник поля
.
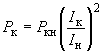
11.2. Добавочные потери холостого хода определяются методом скачка гистерезиса. Испытуемый двигатель, включенный на номинальное напряжение, вращают динамометром или тарированной машиной постоянного тока с частотой вращения около синхронной. Рекомендуется проводить измерения в 5 точках при частоте вращения выше и ниже синхронной. Измеряют потребляемую мощность, момент и скольжение. При синхронной частоте вращения измеряют ток статора, далее при отключенном от сети двигателе при синхронной частоте вращения измеряют мощность динамометра, равную механическим потерям испытуемого двигателя. После отключения и остановки двигателя измеряют сопротивление обмотки статора.
Мощность, подводимая из сети, и мощность на валу динамометра строят в зависимости от скольжения (черт.9). Эти прямые отсекают на оси ординат при скольжении, равном нулю, некоторые отрезки, обусловленные явлением гистерезиса. Середина верхнего отрезка даст сумму основных потерь в стали ![]() и потерь в меди статора
и потерь в меди статора , середина нижнего отрезка даст сумму добавочных потерь холостого хода и механических потерь испытуемого двигателя.
Черт.9![]() ,
,
где ![]() определяют по черт.9,
определяют по черт.9, рассчитывают по измеренным току и сопротивлению
![]() ,
,
где ![]() определяют по черт.9,
определяют по черт.9, - из опыта холостого хода при отключении испытуемого двигателя.
Правильность результата проверяют по формуле
![]() .
.
(Измененная редакция, Изм. N 1).
11.3. Нагрузочные добавочные потери двигателей с К.П.Д. не выше 85% определяют методом непосредственной нагрузки. Добавочные потери двигателей с К.П.Д. выше 85% определяют методом взаимной нагрузки с использованием тарированной асинхронной машины с фазным ротором двойного питания, методом обратного вращения или методом синхронного короткого замыкания (для двигателей с фазным ротором).
11.3.1. При определении добавочных потерь методом непосредственной нагрузки дополнительно измеряют сопротивление обмотки статора для каждой точки. Опыт проводят одновременно с опытом снятия рабочих характеристик. Добавочные потери рассчитывают по формуле
![]() ,
,
где - потери в меди статора, кВт, рассчитанные по измеренным токам и сопротивлению обмотки статора;
- потери в контурах ротора, кВт, рассчитанные по измеренному скольжению.
Эти потери строят в зависимости от квадрата момента (черт.10). Методом наименьших квадратов находится прямая, отсекающая на оси ординат некоторый отрезок
![]() ,
,
где - угловой коэффициент прямой;
- момент.
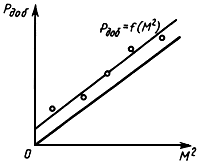
Черт.10
По экспериментальным точкам и уравнению прямой находят коэффициент корреляции. Если коэффициент корреляции больше или равен 0,9 и коэффициент положителен, полученную прямую параллельно переносят в начало координат и по ней определяют добавочные потери. Если коэффициент корреляции меньше, чем 0,9 - отбрасывают наихудшую точку и повторяют расчет. Если при этом коэффициент корреляции возрастет до 0,9 или более, то используют второй расчет, если не возрастает или наклон отрицателен, то испытание считается неудовлетворительным и должно быть повторено.
При повторных испытаниях строят зависимость момента от электрической мощности при постепенном увеличении нагрузки. Для каждой серии показаний строится момент в зависимости от электрической мощности и следует использовать среднее значение этих кривых.
(Измененная редакция, Изм. N 2).
11.3.2. При определении добавочных потерь методом взаимной нагрузки испытуемый двигатель соединяют механически с тарированным двигателем с фазным ротором. Оба двигателя питаются параллельно от одного источника. С помощью независимого регулируемого источника низкой частоты, питающего фазный ротор, устанавливают номинальную нагрузку испытуемого электродвигателя при общем коэффициенте мощности близком к 1. Измеряют общую мощность (ваттметрами или счетчиком энергии), токи статора двух машин, сопротивления обмоток статора и соединительных проводов. Опыт проводят одновременно с опытом снятия рабочих характеристик. Добавочные потери при номинальной нагрузке определяют по формуле
![]() ,
,
где - мощность, подводимая из сети, кВт;
- сумма потерь в меди статора двух машин и в соединительных проводах, кВт;
![]() - добавочные потери в двигателе с фазным ротором, кВт;
- добавочные потери в двигателе с фазным ротором, кВт;
- сумма потерь в стали и механических двух электродвигателей, практически равная подводимой мощности при скольжении, равном нулю (нулевой частоте питания ротора), кВт.
Добавочные потери в тарированном двигателе с фазным ротором могут быть определены при испытании данным методом двух одинаковых машин с фазным ротором в асинхронном или синхронном режиме.
(Измененная редакция, Изм. N 1).
11.3.3. Определение добавочных потерь методом обратного вращения предусматривает раздельное их определение от основной частоты и высокочастотных. Добавочные потери при номинальной нагрузке определяют для тока статора равного
![]() ,
,
где - ток холостого хода, А.
Добавочные потери от основной частоты определяют при вынутом роторе, при этом остальные конструктивные части (подшипниковые щиты и др.) остаются на своих местах. На статор подают пониженное напряжение, измеряют мощность, токи и сопротивление обмотки статора после каждой точки нагрузки. Снимают 4-6 точек при токах от 0 до номинального. Потери определяют по формуле
![]() ,
,
где - подводимая мощность, кВт;
- потери в меди статора, кВт, определенные по измеренным токам и сопротивлению.
При определении высокочастотных добавочных потерь методом обратного вращения испытуемый электродвигатель при пониженном напряжении вращают с синхронной частотой вращения против поля динамометром или калиброванной машиной меньшей мощности. Частота вращения может быть определена стробоскопическим методом или цифровым тахометром. Измеряют мощности, подводимые к статору и ротору, токи и сопротивление обмотки статора после каждой точки. Снимают 4-6 точек при изменении тока от номинального до 0. Высокочастотные добавочные потери вычисляют по формуле
![]() ,
,
где - мощность, кВт, подводимая к ротору при токе статора
;
- мощность, кВт, подводимая к ротору при токе статора равном нулю (при отключенном двигателе);
- мощность, кВт, подводимая к обмотке статора;
- потери в меди статора, кВт;
- добавочные потери, кВт, основной частоты.
По данным опытов следует построить зависимость механической мощности (первая скобка) и электромагнитной мощности (вторая скобка) от квадрата измеренного тока.
При отсутствии динамометра и калиброванной машины высокочастотные добавочные потери надлежит определять следующим способом.
Испытуемый двигатель подключают к источнику питания и приводят во вращение в режиме холостого хода с частотой вращения, равной 1,1-1,15 синхронной. Затем источник питания отключают, и на статор подают пониженное напряжение номинальной частоты с обратным чередованием фаз. В процессе торможения ротора измеряют мощность, подведенную к статору, токи статора, частоту вращения и сопротивление обмотки статора после каждого опыта. Проводят 5-6 опытов при различных значениях тока в пределах от нуля до номинального. Из каждого опыта определяют мощность, ток и ускорение ротора по ГОСТ 11828 при синхронной частоте вращения ротора. Высокочастотные добавочные потери вычисляют по формуле
![]() ,
,
где - механические потери испытуемого двигателя;
![]() и
и ![]() - ускорение ротора при токе
- ускорение ротора при токе ![]() и
и .
(Измененная редакция, Изм. N 1, 2).
11.3.4. При определении добавочных потерь методом синхронного короткого замыкания определяют добавочные потери основной частоты и высокочастотные добавочные потери. При определении добавочных потерь ротор вращают с синхронной частотой вращения динамометром или тарированной машиной постоянного тока меньшей мощности. В обмотку ротора подается постоянный ток, а обмотка статора замыкается накоротко через амперметры, снимают 4-6 точек при токах от номинального до 0. Добавочные потери определяют по формуле
![]() ,
,
где - мощность, кВт, подводимая к ротору при токе статора
;
- мощность, кВт, подводимая к ротору при вращении с синхронной частотой вращения невозбужденного испытуемого двигателя;
- потери в меди статора, кВт, рассчитанные по измеренным токам и сопротивлению.
12. ТРЕБОВАНИЯ БЕЗОПАСНОСТИ
12.1. Электрические испытания двигателей и измерения должны проводиться в соответствии с требованиями безопасности по ГОСТ 12.3.019 и пожарной безопасности по ГОСТ 12.1.004. При испытаниях должны соблюдаться действующие "Правила техники безопасности при эксплуатации электроустановок потребителей".
Особое внимание следует обращать на технику безопасности при испытании изоляции обмоток на электрическую прочность, при испытании на повышенную частоту вращения, а также при определении тока и потерь короткого замыкания. В последнем случае перед началом опыта обязательно должно быть проверено направление вращения.
(Измененная редакция, Изм. N 2).
ПРИЛОЖЕНИЕ 1
Обязательное
Форма 1
Определение параметров намагничивающего контура
по данным опыта холостого хода
Формула | Единицы измеряемой величины | При номинальном напряжении | При напряжении, соответствующем опыту короткого замыкания | При напряжении, соответствующем опыту нагрузки |
В | ||||
| А | |||
Вт | ||||
Ом | ||||
| Ом | |||
| Ом | |||
| Ом | |||
| Ом | |||
| См | |||
| См |
_______________
* Опытные данные.
** Напряжение, соответствующее опыту короткого замыкания, при ![]() , необходимо привести к номинальной частоте
, необходимо привести к номинальной частоте ,
![]() .
.
_______________
Приведенная сноска в таблице отсутствует. - Примечание "КОДЕКС".
Форма 2
Определение параметров контура ротора по данным опыта нагрузки
Формула | Единицы измеряемой величины | Значения величин |
В | ||
А | ||
Вт | ||
- | ||
Ом | ||
См | ||
См | ||
| Ом | |
| Ом | |
| Ом | |
| Ом | |
| Ом | |
| См | |
| См | |
| См | |
| Ом | |
| Ом |


________________
* Опытные данные, а также параметры намагничивающего контура при соответствующем напряжении из формы 1.
Форма 3
Определение параметров контура ротора по данным опыта
короткого замыкания
Формула | Единицы измеряемой величины | Значения величин |
В | ||
А | ||
Вт | ||
Ом | ||
Гц | ||
См | ||
См | ||
| - | |
| Ом | |
| Ом | |
| Ом | |
| Ом | |
| Ом | |
| Ом | |
| См | |
| См | |
| См | |
| Ом | |
| Ом |


_______________
* Опытные данные или данные из формы 1.
Форма 4
Вычисление рабочей характеристики по схеме замещения
с одним контуром на роторе
Формула | Единицы измеряемой величины | Значения |
- |
| |
| Ом | |
Ом | ||
| См | |
| См | |
См | ||
| См | |
| См | |
См | ||
| См | |
| См | |
| Ом | |
Ом | ||
| Ом | |
| Ом | |
| Ом | |
| А | |
| Вт | |
| Вт | |
Вт | ||
| Вт | |
| Вт | |
Вт | ||
Вт | ||
| Вт | |
| Вт | |
| % | |
| - | |
| Н·м |
________________
* - опытные данные или данные из форм 1-3
и
при номинальном напряжении
ПРИЛОЖЕНИЕ 1. (Измененная редакция, Изм. N 2).
ПРИЛОЖЕНИЕ 2
Обязательное
ОПРЕДЕЛЕНИЕ РАБОЧИХ ХАРАКТЕРИСТИК ПОСРЕДСТВОМ
КРУГОВОЙ ДИАГРАММЫ
1. Исходные данные для построения диаграммы
1.1. Исходными данными для построения диаграммы двигателя любого вида являются:
фазный ток холостого хода при номинальном напряжении
и номинальной частоте
;
разность между потерями холостого хода при номинальном напряжении и механическими потерями
![]() ;
;
линейное напряжение , соответствующее току короткого замыкания
![]() ;
;
потери короткого замыкания , соответствующие току
;
фазный ток короткого замыкания , равный 2,5-4-кратному значению номинального тока
;
линейное напряжение , соответствующее току
;
потери короткого замыкания , соответствующие току
;
сопротивление фазы обмотки статора , приведенное к расчетной рабочей температуре по ГОСТ 25941;
сопротивление фазы обмотки статора , измеренное непосредственно после определения напряжения
и потерь
;
сопротивление фазы обмотки статора , измеренное непосредственно после определения напряжения
и потерь
.
(Измененная реда
кция, Изм. N 1).
1.2. Дополнительными исходными данными для построения диаграммы двигателя с фазным ротором являются:
коэффициент трансформации ;
сопротивление фазы обмотки ротора , приведенное к расчетной рабочей температуре по ГОСТ 25941.
1.3. Дополнительными исходными данными для построения диаграммы двигателя с короткозамкнутым ротором с глубоким пазом или с двойной клеткой ротора являются:
линейное напряжение короткого замыкания при пониженной частоте
и токе короткого замыкания
![]() ;
;
потери короткого замыкания при пониженной частоте
, соответствующие току
.
Примечание. Значение пониженной частоты не должно превосходить 5 Гц независимо от номинального значения частоты
.
(Измененная редакция, Изм. N 1).
2. Обработка исходных данных
2.1. По данным, перечисленным в п.1.1, надлежит вычислить:
условный фазный ток короткого замыкания при номинальном напряжении
по формуле (черт.11).
![]() ;
;
Черт.11
условные потери короткого замыкания при токе
по формуле
 ;
;
условный фазный ток короткого замыкания при номинальном напряжении
по формуле (черт.11).
![]() ;
;
условные потери короткого замыкания при токе
по формуле
 .
.
(Измененная редакция, Изм. N 1).
2.2. По данным, перечисленным в п.1.2, надлежит вычислить сопротивление фазы обмотки ротора , приведенное к числу витков обмотки статора по формуле
![]() .
.
2.3. По данным, перечисленным в пп.1.1 и 1.3, надлежит вычислить:
условный фазный ток короткого замыкания при напряжении, во столько раз меньшем номинального, во сколько раз пониженная частота
меньше номинальной
, по формуле
 ;
;
условные потери короткого замыкания при токе
но формуле
 ;
;
условный фазный ток короткого замыкания при номинальном напряжении
но формуле
![]() ;
;
условные потери короткого замыкания , соответствующие току
, по формуле
 ;
;
условный фазный ток короткого замыкания при номинальном напряжении
по формуле
![]() ;
;
условные потери короткого замыкания , соответствующие току
, но формуле
 .
.
(Измененная редакция, Изм. N 1).
3. Выбор масштабов
3.1. Масштаб тока следует выбирать таким образом, чтобы длина вектора номинального тока была не меньше (50±15) мм:
![]() .
.
Примечание. При малых числах пар полюсов, особенно при =1, рекомендуется принимать длину вектора тока
ближе к нижнему из указанных пределов, а при больших числах пар полюсов - ближе к верхнему пределу.
3.2. Масштаб мощности при выбранном масштабе тока будет равен:
![]() кВт.
кВт.
3.3. Масштаб мощности при пониженной частоте будет равен
![]() кВт.
кВт.
4. Построение окружностей тока
4.1. Для двигателей с короткозамкнутым ротором с простой клеткой построение окружности рабочих токов надлежит производить следующим образом (черт.12):
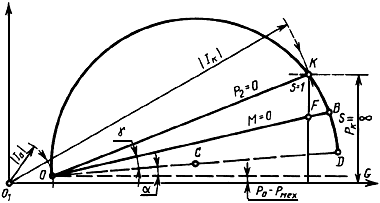
Черт.12
Построить точку - конец вектора тока холостого хода
- по току
и потерям
![]() , откладывая последние от горизонтальной оси, проведенной через полюс диаграммы
, откладывая последние от горизонтальной оси, проведенной через полюс диаграммы , и пользуясь масштабами тока и мощности, выбранными по пп.3.1 и 3.2, и провести через точку
прямую
, параллельную горизонтальной оси.
Провести через точку прямую
под углом
к прямой
, определяемым по формуле
![]() .
.
Построить точку условного короткого замыкания без учета насыщения по условному току короткого замыкания
и условным потерям короткого замыкания
.
Провести через точку и
окружность с центром
на прямой
, являющуюся окружностью рабочих токов двигателя.
Провести через точки и
прямую
, являющуюся линией отдаваемой мощности
![]() .
.
Провести прямую под углом у к прямой
, определяемым по формуле
![]() ,
,
где - диаметр окружности рабочих токов
к амперах. Прямая
является линией вращающего момента
=0, а точка
ее пересечения с окружностью
- теоретической точкой бесконечно большого скольжения
![]() .
.
(Измененная редакция, Изм. N 1)
.
4.2. Для двигателей с фазным ротором построение окружности рабочих токов следует производить подобно п.4.1, однако линию отдаваемой мощности =0 надлежит проводить через точки
и
; последняя является точкой теоретического короткого замыкания при значениях параметров, соответствующих номинальному режиму (черт.13), и ее положение на окружности
определяется следующим образом: из точки
опускается перпендикуляр на прямую
и от точки
его пересечения с прямой
откладывается вверх отрезок
, длина которого определяется по формуле
 .
.
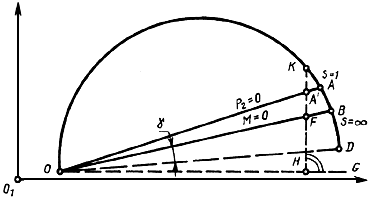
Черт.13
4.3. Для двигателей с короткозамкнутым ротором с глубоким пазом или с двойной клеткой ротора построение окружности рабочих токов надлежит производить следующим образом (черт.14):
построить точку согласно п.4.1 и точку
по условному току короткого замыкания при пониженной частоте
и соответствующим ему условным потерям короткого замыкания
.
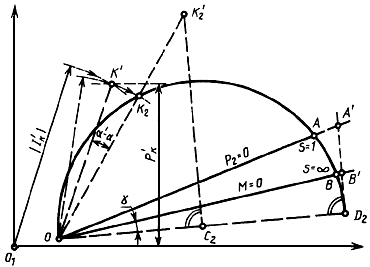
Черт.14
Из точки провести луч
и повернуть его по часовой стрелке на угол
в положение
, здесь
![]() .
.
Из точки радиусом
сделать засечку на направление луча
в точке
.
Провести через точки и
окружность
![]() с центром
с центром на прямой
.
Восстановить два перпендикуляра к прямой : из центра
до пересечения с продолжением прямой
в точке
и из точки
на последнем отложить вверх отрезок
![]() ;
;
прямая является линией отдаваемой мощности
=0, а точка
ее пересечения с окружностью
![]() теоретической точкой короткого замыкания при значениях параметров, соответствующих номинальному режиму.
теоретической точкой короткого замыкания при значениях параметров, соответствующих номинальному режиму.
Провести линию , являющуюся линией вращающего момента
=0, под углом
к прямой
и продолжить ее до пересечения с перпендикуляром
в точке
; точка
пересечения этой прямой с окружностью
![]() является теоретической точкой бесконечно большого скольжения
является теоретической точкой бесконечно большого скольжения ![]() .
.
(Измененная редакция, Изм. N 1).
5. Определение номинального тока и номинального коэффициента мощности
Для двигателей всех видов определения номинального тока и номинального коэффициента мощности следует производить одинаковым образом: перпендикулярно горизонтальной оси следует отложить в масштабе мощности от линии вращающего момента =0 номинальный момент
в кВт, вычисленный по формуле
![]() ,
,
где - номинальная отдаваемая мощность, кВт;
- добавочные потери при нагрузке, определяемые по п.11.3 и ГОСТ 25941;
- частота вращения магнитного поля, мин
;
- номинальная частота вращения двигателя, мин
;
Примечание. Значения и
на данной стадии построения еще не известны и принимаются по номинальным данным.
Засечка отрезком такой длины на окружность рабочих токов дает точку - конец вектора номинального тока
. Длина
перпендикуляра, отпущенного из точки
на горизонтальную ось, в масштабе мощности представляет подводимую мощность
(черт.15).
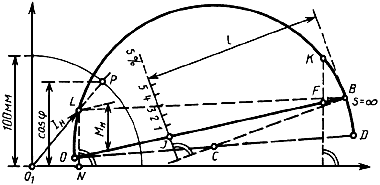
Черт.15
Из полюса диаграммы радиусом 100 мм описать дугу между горизонтальной и вертикальной осями, проекция отрезка
- продолжения вектора тока
до пересечения с этой дугой на вертикальную ось дает значение коэффициента мощности
в масштабе 100 мм =1,0.
(Измененная редакция, Изм. N 2).
6. Построение шкалы скольжения
Для построения шкалы скольжения следует отложить от точки - теоретической точки бесконечно большого скольжения - параллельно линии вращающего момента
=0 отрезок
длина которого
, мм, определяется следующим образом:
для двигателей с короткозамкнутым ротором с простой клеткой - из равенства (черт.12)
![]()
для двигателей с фазным ротором - из равенства (черт.13)
![]()
для двигателей с короткозамкнутым ротором с глубоким пазом или с двойной клеткой ротора - из равенства (черт.14)
![]() .
.
Через точку провести перпендикуляр к прямой, проходящей через центр окружности рабочих токов
(или
) и точку
, и отложить от точки
вверх миллиметровую шкалу (черт.15). Прямая, соединяющая точку
с концом вектора тока
точкой
- отсекает на этой шкале скольжение
в масштабе 10 мм =1%.
7. Определение максимального момента
Для двигателей с короткозамкнутым ротором с простой клеткой и для двигателей с фазным ротором построить точку по условному току короткого замыкания
и условным потерям короткого замыкания
и через точки
и
провести окружность
![]() , являющуюся окружностью токов перегрузки двигателя, близкой к его опрокидыванию (черт.16), с центром
, являющуюся окружностью токов перегрузки двигателя, близкой к его опрокидыванию (черт.16), с центром на прямой
.
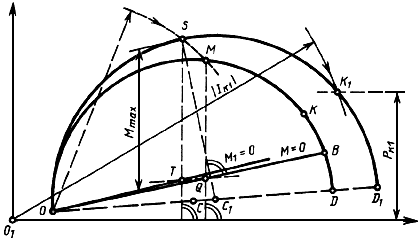
Черт.16
Из центра окружности
![]() восстановить перпендикуляр к линии вращающего момента
восстановить перпендикуляр к линии вращающего момента =0 до пересечения его с этой окружностью в точке
и из точки
радиусом
сделать засечку на окружность
в точке
; из этой точки опустить перпендикуляр на горизонтальную ось и через точку
его пересечения с линией вращающего момента
=0 провести прямую
, параллельную линии
. Длина
перпендикуляра, опущенного из точки
на эту прямую, в масштабе мощности представляет максимальный момент
![]() , а прямая
, а прямая - линию момента
=0 для окружности
![]() токов перегрузки двигателей, близкой к его опрокидыванию.
токов перегрузки двигателей, близкой к его опрокидыванию.
Для двигателей с короткозамкнутым ротором с глубоким пазом или с двойной клеткой ротора следует построить две вспомогательные окружности ![]() и
и ![]() с центрами на прямой
с центрами на прямой ![]() и
и по условным токам короткого замыкания
и
и условным потерям короткого замыкания
и
, пользуясь масштабами тока и мощности по п.3 (черт.17).
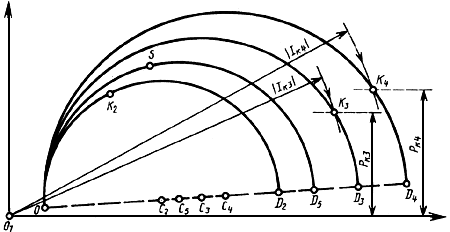
Черт.17
Построить окружность ![]() с центром
с центром , на прямой
, являющуюся окружностью токов перегрузки двигателя, близкой к его опрокидыванию, диаметр этой окружности
находится в таком же отношении к диаметру
окружности
![]() , как диаметр
, как диаметр * окружности
![]() к диаметру
к диаметру окружности
![]()
_______________
* Соответствует оригиналу. - Примечание "КОДЕКС".
 .
.
Определить максимальный вращающий момент ![]() по предыдущему, но с заменой окружности
по предыдущему, но с заменой окружности ![]() окружностью
окружностью ![]() и окружности
и окружности - окружностью
![]() .
.
ПРИЛОЖЕНИЕ 3
Справочное
Перечень стандартов на другие виды испытаний
ГОСТ 11828-86 | - | Измерение сопротивления изоляции обмоток относительно корпуса двигателя и между обмотками. |
Испытания: | ||
междувитковой изоляции на электрическую прочность; | ||
изоляции обмоток относительно корпуса двигателя и между обмотками на электрическую прочность; | ||
при повышенной частоте вращения; | ||
на кратковременную перегрузку по току; | ||
воздухоохладителей. | ||
Измерение сопротивлений термометров сопротивления при температуре окружающей среды. | ||
Измерение температуры частей электрической машины. | ||
Измерение электрического напряжения между концами вала и проверка состояния изоляции опор. | ||
Определение динамического момента инерции ротора. | ||
ГОСТ 11929-87 | - | Измерение уровня шума. |
ГОСТ 12259-75 | - | Определение расхода охлаждающего воздуха. |
ГОСТ 14254-96 | - | Проверка степени защиты двигателя и его выводного устройства. |
ГОСТ 15543.1-89 | - | Испытания на стойкость к климатически воздействующим факторам. |
ГОСТ 16264.0-85 | - | Испытание двигателей малой мощности до 1000 Вт. |
ГОСТ 16962.2-90 | - | Испытания на стойкость к механическим воздействующим факторам. |
ГОСТ 20815-93 | - | Машины электрические вращающиеся. Механическая вибрация некоторых видов машин с высотой оси вращения 56 мм и более. Измерение, оценка и допустимые значения. |
ПРИЛОЖЕНИЕ 3. (Измененная редакция, Изм. N 2).
Текст документа сверен по:
М.: ИПК Издательство стандартов, 2003
{kind=link}