ГОСТ IEC/TS 60034-25-2017
Группа Е60
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МАШИНЫ ЭЛЕКТРИЧЕСКИЕ ВРАЩАЮЩИЕСЯ
Часть 25
Электрические машины переменного тока, используемые в системах силового привода. Руководство по применению
Rotating electrical machines. Part 25. AC electrical machines used in power drive systems. Application guide
МКС 29.160
Дата введения 2019-06-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены в ГОСТ 1.0-2015 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2015 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего образования "Национальный исследовательский университет "МЭИ" (ФГБОУ ВО "НИУ "МЭИ") и Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт стандартизации и сертификации в машиностроении" (ВНИИНМАШ) на основе собственного перевода на русский язык англоязычной версии документа, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 25 сентября 2017 г. N 103-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
Украина | UA | Минэкономразвития Украины |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 9 ноября 2018 г. N 957-ст межгосударственный стандарт ГОСТ IEC/TS 60034-25-2017 введен в действие в качестве национального стандарта Российской Федерации с 1 июня 2019 г.
5 Настоящий стандарт идентичен международному документу IEC/TS 60034-25:2014* "Машины электрические вращающиеся. Часть 25. Электрические машины переменного тока, используемые в системах силового привода. Руководство по применению" ("Rotating electrical machines - Part 25: AC electrical machines used in power drive systems - Application guide", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт разработан Техническим комитетом по стандартизации TC 2 "Вращающиеся машины" Международной электротехнической комиссии (IEC).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Характеристики и переменные электрической машины при ее работе от преобразователя определяются системой электропривода в целом, включая систему питания, силовой преобразователь, кабельные соединения, электрическую машину, трансмиссию и систему управления. Каждый из этих компонентов может присутствовать в различном техническом исполнении. Поэтому каждая величина, содержащаяся в настоящем стандарте, рассматривается отдельно.
Ввиду наличия сложных взаимосвязей внутри системы и разнообразия режимов работы определение всех важных для проектирования электропривода численных значений параметров и их ограничений в рамках настоящего стандарта не представляется возможным.
Более того, на практике электропривод часто комплектуется элементами от разных производителей. Поэтому целью данного стандарта является объяснить, насколько возможно, влияние комплектующих на дизайн электрической машины и ее характеристики.
Настоящий стандарт распространяется как на машины, специально спроектированные для питания от преобразователя, так и на машины, питаемые от преобразователя, входящие в сферу применения стандарта IEC 60034-12 и предназначенные для работы от сети.
1 Область применения
Настоящий стандарт содержит характеристики электрических машин переменного тока, предназначенных для питания от преобразователей.
Определены требования к проектированию электрических машин, специально предназначенных для работы от преобразователей. Стандарт также определяет параметры интерфейса и взаимодействия между электрической машиной и преобразователем, включая руководство по монтажу и наладке системы силового привода, но не содержит требования к напряжению на фазах питания двигателя, которые описаны в IEC 61800-8.
Общие требования соответствующих частей стандартов серии IEC 60034 также применяются к электрическим машинам, рассматриваемым в настоящем стандарте.
Для электрических машин, работающих в потенциально взрывоопасных средах, дополнительные требования описаны в серии стандартов IEC 60079 или серии IEC 61241.
Требования безопасности не являются основной темой настоящего стандарта, однако некоторые из его рекомендаций могут быть важны для безопасности и могут быть рассмотрены по мере необходимости.
Если производитель преобразователя дает конкретные рекомендации по установке, то они должны иметь приоритет над рекомендациями настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие документы*. Для датированных ссылок используются только упоминаемые издания. Для недатированных ссылок применяют последнее издание ссылочного документа (включая все изменения к нему).
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
IEC 60034-1:2010 Rotating electrical machines - Part 1: Rating and performance (Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики)
IEC 60034-2-1 Rotating electrical machines - Part 2-1: Standards methods for determining losses and efficiency from tests (excluding machines for traction vehicles) [Машины электрические вращающиеся. Часть 2-1. Стандартные методы определения потерь и коэффициента полезного действия вращающихся электрических машин (за исключением машин для подвижного состава)]
IEC 60034-2-2 Rotating electrical machines - Part 2-2: Specific methods for determining losses of large machines from tests - Supplement to IEC 60034-2-1 (Машины электрические вращающиеся. Часть 2-2. Специальные методы определения потерь больших машин по испытаниям. Дополнение к IEC 60034-2-1)
IEC/TS 60034-2-3 Rotating electrical machines - Part 2-3: Specific tests methods for determining losses and efficiency of converter-fed AC induction motors (Машины электрические вращающиеся. Часть 2-3. Специальные методы определения потерь и коэффициента полезного действия асинхронных двигателей переменного тока с питанием от преобразователя)
IEC 60034-6 Rotating electrical machines - Part 6: Methods of cooling (IC сode) [Машины электрические вращающиеся. Часть 6. Методы охлаждения (код IC)]
IEC 60034-9:2003 Rotating electrical machines - Part 9: Noise limits (Машины электрические вращающиеся. Часть 9. Предельные уровни шума)
IEC 60034-12 Rotating electrical machines - Part 12: Starting performance of single-speed three-phase cage induction motors (Машины электрические вращающиеся. Часть 12. Пусковые характеристики односкоростных трехфазных двигателей с короткозамкнутым ротором)
IEC 60034-14:2007 Rotating electrical machines - Part 14: Mechanical vibration of certain machines with shaft heights 56 mm and higher - Measurement, evaluation and limits of vibration severity (Машины электрические вращающиеся. Часть 14. Механическая вибрация некоторых видов машин с высотами вала 56 мм и более. Измерения, оценка и пределы вибрации)
IEC/TS 60034-18-41:2014 Rotating electrical machines - Part 18-41: Partial discharge free electrical insulation systems (Type I) used in rotating electrical machines fed from voltage converters - Qualification and quality control tests [Машины электрические вращающиеся. Часть18-41. Системы электроизоляции, свободные от частичного разряда (тип I), используемые во вращающихся электрических машинах с питанием от преобразователей источника напряжения. Квалификационные испытания и проверка системы контроля качества]
IEC/TS 60034-18-42 Rotating electrical machines - Part 18-42: Qualification and acceptance tests for partial discharge resistant electrical insulation systems (type II) used in rotating electrical machines fed from voltage converters (Машины электрические вращающиеся. Часть18-42. Квалификационные и приемочные испытания для систем электроизоляции, стойких к частичному разряду, типа II, используемых во вращающихся электрических машинах с питанием от преобразователей источника напряжения)
IEC 60050 (all parts) International Electrotechnical Vocabulary (available at //www.electropedia.org) [Международный электротехнический словарь (доступный в //www.electropedia.org)]
IEC/TR 61000-5-1 Electromagnetic compatibility (EMC) - Part 5: Installation and mitigation guidelines - Section 1: General considerations - Basic EMC publication [Электромагнитная совместимость (ЭМС). Часть 5. Руководящие указания по установке устройств защиты и подавлению помех. Раздел 1. Общие соображения. Основная публикация по электромагнитной совместимости]
IEC/TR 61000-5-2 Electromagnetic compatibility (EMC) - Part 5: Installation and mitigation guidelines - Section 2: Earthing and cabling [Электромагнитная совместимость (ЭМС). Часть 5. Руководящие указания по установке устройств защиты и подавлению помех. Раздел 2. Заземление и прокладка кабеля]
IEC 61800-2:1998 Adjustable speed electrical power drive systems - Part 2: General requirements - Rating specifications for low voltage adjustable frequency a. c. power drive systems (Системы силовых электроприводов с регулируемой скоростью. Часть 2. Общие требования. Номинальные технические характеристики низковольтных систем силовых электроприводов переменного тока с регулируемой частотой)
IEC 61800-3 Adjustable speed electrical power drive systems - Part 3: EMC requirements and specific test methods (Системы силовых электроприводов с регулируемой скоростью. Часть 3. Требования к электромагнитной совместимости и специальные методы испытаний)
IEC 61800-5-1 Adjustable speed electrical power drive systems - Part 5-1: Safety requirements - Electrical, thermal and energy (Системы силовых электроприводов с регулируемой скоростью. Часть 5-1. Требования к электрической, термической и энергетической безопасности)
IEC/TS 61800-8:2010 Adjustable speed electrical power drive systems - Part 8: Specification of voltage on the power interface (Электроприводы с регулируемой скоростью. Часть 8. Спецификация напряжения на силовом сопряжении)
IEC/TS 62578:2009 Power electronics systems and equipment - Operation conditions and characteristics of active infeed converter application (Системы и оборудование для силовой электроники. Условия эксплуатации и характеристики преобразователя с электропитанием)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями.
3.1 коэффициент напряжения в подшипнике, BVR (bearing voltage ratio): Отношение напряжения емкостной связи в подшипнике к синфазному напряжению.
3.2 соединение (bonding): Электрическое соединение металлических частей установки между собой и с землей (эквипотенциальное соединение и заземление).
Примечание - Для целей настоящего стандарта это определение сочетает элементы IEC 60050-195-01-10 (эквипотенциальное соединение) и IEC 60050-195-01-16 (функциональное эквипотенциальное соединение).
3.3 синфазное напряжение (ток) [common model voltage (current)]: Среднее арифметическое фазных напряжений (токов) относительно земли.
3.4 преобразователь (converter): Устройство для электронного преобразования энергии с изменением одной или более ее электрических характеристик. Содержит одно или более электронных коммутационных устройств и присоединенных компонентов, таких как трансформаторы, фильтры, вспомогательные средства коммутации, управления, защиты и при необходимости вспомогательное оборудование для собственных нужд.
[IEC 61800-2, 2.2.1, измененный (прим.1 к дополнению)]
Примечание - Это определение взято из IEC 61800-2 и в данном стандарте охватывает термины "комплектный преобразователь" (CDM) и "базовый модуль преобразователя" (BDM), как это используется в серии стандартов IEC 61800.
3.5 электрическая машина с питанием от преобразователя (converter-fed electrical machine): Электрическая машина, питающаяся от преобразователя частоты.
3.6 электрическая машина с нерегулируемой скоростью (fixed-speed electrical machine): Электрическая машина с заявленной номинальной мощностью при питании от сети частотой 50 или 60 Гц.
Примечание - Электрическая машина с нерегулируемой скоростью может питаться от преобразователя и иметь регулируемую скорость.
3.7 электромагнитная совместимость (electromagnetic compatibility), EMC: Способность оборудования или системы функционировать удовлетворительно в окружающей ее электромагнитной среде без привнесения недопустимых электромагнитных помех куда-либо в этом окружении.
[IEC 60050-161:1990, 161-01-07]
3.8 ослабление поля (field weakening): Режим работы двигателя, при котором его магнитный поток меньше, чем поток в номинальном режиме работы.
3.9 время нарастания (rise time): Временной интервал между 10 и 90% напряжения от нуля до максимума (см. рисунок 12).
3.10 электропривод (power drive system), PDS: Система, состоящая из силового оборудования (преобразователь, двигатель переменного тока и другое оборудование, например система питания и др.) и аппаратуры управления подачей команд, напряжением, частотой, током, а также устройств защиты, мониторинга, коммуникации, тестирования, диагностики, интерфейса и т.д.
3.11 защитное заземление (protective earthing), PE: Точка или точки заземления в системе или в установке, или в оборудовании в целях электрической безопасности.
[IEC 60050-195:1998, 195-01-11, измененный]
3.12 пропуск частотного окна (skip band): Небольшой диапазон рабочих частот, где установившаяся работа системы силового электропривода запрещена.
3.13 сопротивление поверхностной передачи (surface transfer impedance): Доля напряжения индуцированного током центрального проводника коаксиальной линии на единицу его длины на внешней поверхности коаксиальной линии.
[IEC 60050-161:1990, 161-04-15]
3.14 системный интегратор (system integrator): Лицо или организация, ответственные за выбор компонентов электропривода, соответствующие его назначению.
3.15 номинальное напряжение (rated voltage) ![]() : Напряжение, объявленное производителем и указанное на заводской табличке, при котором электрическая машина работает на установленной частоте.
: Напряжение, объявленное производителем и указанное на заводской табличке, при котором электрическая машина работает на установленной частоте.
3.16 скачок напряжения (jump voltage): Изменение напряжения на клеммах электрической машины, возникающее при появлении каждого импульса от преобразователя.
4 Характеристики электропривода
4.1 Общие положения
Хотя этапы определения специфических характеристик двигателя и преобразователя однотипны для любого применения, окончательный их выбор в значительной степени зависит от вида механизма. В данном разделе описаны эти этапы и рассмотрено влияние нагрузки различного типа.
4.2 Информация о системе
Лучшим способом обеспечить требуемую работу всей системы является учет всей информации о нагрузке электропривода, двигателе, преобразователе и системе электроснабжения. В общем случае эта информация должна включать:
- требования к мощности или к вращающему моменту на различных скоростях;
- желаемый диапазон скоростей вращения нагрузки и двигателя;
- требования к темпам ускорения и замедления при управлении процессом;
- исходные требования, включая частоту пусков и параметры нагрузки (приведенную к двигателю инерционность, момент нагрузки во время пуска);
- рабочую циклограмму механизма [непрерывный процесс или комбинация пусков, остановок и изменений скорости (см. IEC 60034-1, подраздел 3.1)];
- общее описание объекта, включая окружающую среду, в которой будут работать компоненты электропривода;
- описание дополнительных функциональных возможностей, которыми могут не обладать двигатель и преобразователь (например: контроль температуры двигателя, возможность шунтировать преобразователь в случае необходимости, специальные схемы управления циклограммой работы или сигналами задания скорости для управления электроприводом);
- описание допустимой мощности источника электропитания и электропроводки. На окончательную конфигурацию могут влиять требования к выбранной системе.
4.3 Область формирования механических характеристик
4.3.1 Общие положения
Типичные границы зон, в которых возможно формирование механических характеристик двигателей, питаемых от преобразователей, существенно влияющие факторы и последствия их влияния представлены на рисунках 1, 2 и 3. В зависимости от требований к электроприводу возможно применение различных двигателей для адаптации к конкретным условиям.
Примечание - На рисунках 1-3 не показаны возможные резонансные зоны (см. 4.3.8).
4.3.2 Допустимая область характеристик "скорость - момент"
На рисунке 1 показана область формирования возможных механических характеристик для двигателей, питаемых от преобразователя. Максимально возможный вращающий момент до номинальной частоты ограничен номинальным моментом двигателя и током преобразователя. Выше области номинальных частот ![]() и соответствующей частоты вращения
и соответствующей частоты вращения ![]() двигатель способен работать с постоянной мощностью при вращающем моменте, обратно пропорциональном частоте вращения. Для асинхронных двигателей при достижении минимального значения критического вращающего момента (пропорционального 1/
двигатель способен работать с постоянной мощностью при вращающем моменте, обратно пропорциональном частоте вращения. Для асинхронных двигателей при достижении минимального значения критического вращающего момента (пропорционального 1/) мощность должна быть уменьшена обратно пропорционально частоте вращения
. Это ограничивает допустимый вращающий момент значением, обратно пропорциональным квадрату частоты вращения (расширенный диапазон).
|
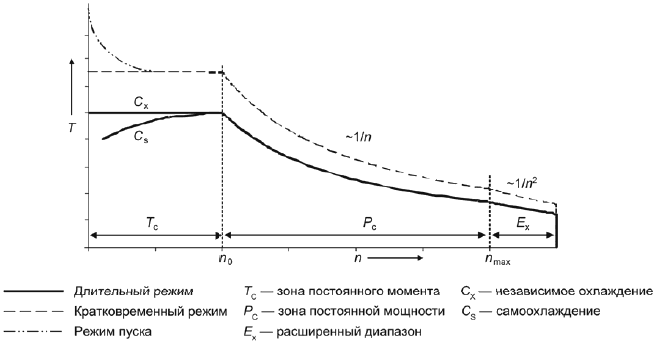
Рисунок 1 - Допустимая область формирования механических характеристик
Для синхронных двигателей расширенный диапазон не применяется. Максимально допустимая частота вращения ![]() ограничена не только понижением вращающего момента, обусловленного ослаблением поля при частоте вращения выше
ограничена не только понижением вращающего момента, обусловленного ослаблением поля при частоте вращения выше ![]() , но также и механической прочностью, балансировкой ротора, скоростными возможностями подшипниковой системы и другими механическими параметрами.
, но также и механической прочностью, балансировкой ротора, скоростными возможностями подшипниковой системы и другими механическими параметрами.
В двигателях с естественным охлаждением при низких частотах вращения во избежание перегрева вращающий момент должен быть уменьшен.
В некоторых применениях возможно кратковременное повышение вращающего момента при пуске.
На рисунке 2 приведены соответствующие области допустимых значений выходного тока преобразователя ().
|

Рисунок 2 - Допустимый выходной ток преобразователя
4.3.3 Номинальные данные электрической машины
Номинальная точка машины, спроектированной для питания от преобразователя, соответствует номинальным значениям скорости вращения, напряжения, тока, момента и мощности. Обычно в этой точке машина развивает максимальный момент и мощность (что показано на рисунке 1) при скорости ![]() . Максимальная рабочая скорость может быть выше номинальной, и в зависимости от характеристик "напряжение - частота" (см. 4.3.7) максимальное напряжение может превышать номинальное.
. Максимальная рабочая скорость может быть выше номинальной, и в зависимости от характеристик "напряжение - частота" (см. 4.3.7) максимальное напряжение может превышать номинальное.
4.3.4 Факторы, влияющие на область формирования механических характеристик
Существенные факторы, которые определяют границы области формирования механических характеристик (скорость - момент), представлены в таблице 1.
Таблица 1 - Существенные факторы, влияющие на механическую характеристику
Условие | Двигатель | Преобразователь |
Трогание | Максимальный поток | Максимальный ток |
Постоянный поток | Охлаждение (потери | Максимальный ток |
Ослабление поля (уменьшенный поток) | Максимальная скорость (механическая прочность и выносливость); максимальный момент (критический момент) | Максимальное напряжение |
Динамическая характеристика | Эквивалентные параметры цепи (определенные моделированием) | Характеристика управления |
4.3.5 Безопасная рабочая скорость, перегрузочная способность по скорости
Если электрическая машина переменного тока предназначена для применения с преобразователем, то производитель должен об этом объявить и указать на заводской табличке. Безопасные рабочие скорости вращения низковольтных асинхронных двигателей определены в разделе 9.6 IEC 60034-1:2010.
Превышение скорости машин переменного тока возможно, как определено в разделе 9.7 IEC 60034-1:2010, но испытание на превышение скорости обычно не считают необходимым. Роль испытания, если оно задано и согласовано, состоит в том, чтобы проверить работоспособность конструкции ротора под действием центробежных сил. Хотя для нерегулируемого двигателя практически невозможно достичь рабочей скорости выше его синхронной, электрические генераторы могут быть разогнаны до скорости выше их синхронной скорости турбиной, например при внезапном отключении нагрузки.
Для электрических двигателей, питаемых от преобразователя, разгон до скорости выше максимальной, определенной системой управления преобразователем, невозможен. Для сверхмощных синхронных двигателей зачастую целесообразно в общем случае ограничить проверочное превышение скорости на уровне 1,05 от максимальной рабочей скорости. Никакого технически оправданного аргумента против такого ограничения не имеется.
Необходимо принять во внимание, что для обеспечения вращения на высокой скорости может потребоваться точная балансировка ротора. Кроме того, длительная работа на высокой скорости может стать причиной снижения срока службы подшипников. Для высокоскоростных приложений особое внимание также должно быть обращено на срок службы смазочных материалов и на периодичность их замены или пополнения.
4.3.6 Охлаждающие устройства
Как показано на рисунке 1, тип охлаждения влияет на уровень максимально допустимого вращающего момента электропривода. Для электрических машин с номиналами мощностей в диапазоне мегаватт часто применяют охлаждающие устройства, состоящие из первичного контура охлаждения (обычно с воздухом в качестве первичного хладагента) и вторичного контура охлаждения (с воздухом или водой в качестве вторичного хладагента). Потери передаются теплообменником от первичного ко вторичному контуру.
- Когда первичный и вторичный хладагенты перемещаются отдельными устройствами и их поток не зависит от скорости ротора машины (например, IC656 согласно IEC 60034-6), то руководствуются кривой на рисунке 1 для независимого охлаждения.
- Когда вторичный хладагент перемещается отдельным устройством, а первичный хладагент приводится в движение устройством, связанным с валом (например, IC81W или IC616), то применяется кривая на рисунке 1 для самоохлаждения.
- Когда и первичный, и вторичный хладагенты приводятся в движение устройством, связанным с валом, то выходной вращающий момент не должен превышать кривую ![]() , а рекомендуемая минимальная рабочая скорость должна быть
, а рекомендуемая минимальная рабочая скорость должна быть 70% номинальной скорости.
4.3.7 Характеристики напряжение - частота
Связь между выходным напряжением преобразователя (![]() ) и частотой может носить различный характер, как показано на рисунке 3.
) и частотой может носить различный характер, как показано на рисунке 3.
|
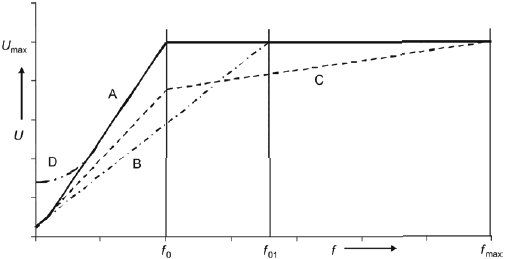
Рисунок 3 - Характеристики "выходное напряжение преобразователя - частота"
На рисунке 3 обозначены характеристики для режимов:
A - напряжение увеличивается с частотой, и максимальное выходное напряжение преобразователя ![]() достигается в области частоты перехода
достигается в области частоты перехода ![]() (начала снижения потока);
(начала снижения потока);
B - напряжение увеличивается с частотой, и значение максимального выходного напряжения преобразователя ![]() достигается выше
достигается выше ![]() при частоте
при частоте ![]() . Это обеспечивает расширенный диапазон скорости при постоянном потоке (постоянный вращающий момент), но допустимый вращающий момент в этом диапазоне скорости меньше, чем в случае A;
. Это обеспечивает расширенный диапазон скорости при постоянном потоке (постоянный вращающий момент), но допустимый вращающий момент в этом диапазоне скорости меньше, чем в случае A;
C - напряжение увеличивается с частотой до ![]() , а затем его рост замедляется, максимальное выходное напряжение преобразователя
, а затем его рост замедляется, максимальное выходное напряжение преобразователя ![]() достигается при
достигается при ![]() . Это исключает чрезмерное снижение вращающего момента в зоне постоянного потока;
. Это исключает чрезмерное снижение вращающего момента в зоне постоянного потока;
D - повышение напряжения применяется при очень низких частотах для улучшения пусковой характеристики и предотвращения нежелательного увеличения тока.
Во всех этих случаях зависимость "напряжение - частота" может быть линейной или нелинейной, согласно требованиям характеристики "вращающий момент нагрузки - скорость".
4.3.8 Резонансные зоны
Область, в которой происходит регулирование скорости двигателя, питаемого от преобразователя, может включать скорости, при которых может возникнуть резонанс в элементах статора двигателя, в системе "вал двигателя - нагрузка" или в приводимом в движение оборудовании.
В зависимости от типа преобразователя может быть обеспечена возможность пропустить резонансные частоты (введение частотного окна). Однако даже когда резонансные частоты пропущены, механизм будет проходить через эту зону частот (скоростей) при условии, что двигателю будет задан пуск на любую скорость выше данной. Уменьшение времени ускорения может способствовать минимизации времени прохождения резонансных частот.
4.3.9 Рабочий цикл
4.3.9.1 Общие положения
Механизмы с циклическими нагрузками характеризуются присутствием периодических изменений скоростей или нагрузок (см. IEC 60034-1). Этот тип механизмов предъявляет особые требования к двигателю и преобразователю.
- Рассеяние тепла двигателем зависит от скорости вращения и способа охлаждения.
- Иногда от двигателя может потребоваться вращающий момент, превышающий статический момент полной нагрузки. Работа двигателя с перегрузкой может потребоваться для разгона, преодоления пиков нагрузки, а также при интенсивном торможении. Работа двигателя с током выше номинального вызывает его перегрев. Это может потребовать более высокого класса изоляции двигателя или уточнение расчета циклограммы с учетом нагрева и охлаждения для данного применения (см. IEC 60034-1, режим работы S10).
- Для уменьшения скорости двигателя могут потребоваться торможение постоянным током, динамическое или рекуперативное торможение. Независимо от того, производит ли двигатель вращающий момент, чтобы привести в действие механизм, отдает ли энергию от нагрузки через двигатель в преобразователь или создает тормозной момент для замедления посредством питания обмоток постоянным током, нагрев двигателя приблизительно пропорционален квадрату тока в обмотках. Этот нагрев должен быть включен в анализ цикла работы. Кроме того, кратковременный вращающий момент, приложенный к валу при торможении, должен контролироваться на уровне, не приводящем к механическим повреждениям.
Примечание - IEC 61800-6 предоставляет информацию о режиме нагрузки и определении тока для всего электропривода.
4.3.9.2 Большие ударные нагрузки
Большие ударные нагрузки - особый случай работы, который имеет место в применениях с прерывистым вращающим моментом (например, IEC 60034-1, режим работы S6). В этих случаях нагрузка прилагается или снимается с двигателя очень быстро. Вращающий момент нагрузки может быть как положительным (против направления вращения двигателя), так и отрицательным (в направлении вращения двигателя).
Ударная нагрузка приводит к быстрому увеличению или уменьшению требуемого тока (от преобразователя). Если вращающий момент отрицателен, то двигатель может генерировать энергию, передавая ее в преобразователь. Переходные токи создают перенапряжения в обмотках статора. Величина этих переходных токов является функцией мощности преобразователя и двигателя.
4.4 Требования к двигателю
Примечание - Этот подпункт относится главным образом к асинхронным двигателям, но некоторые из требований могут также быть важными для других типов двигателей.
Таблица 2 содержит рекомендации по выбору двигателей для основных рабочих режимов.
Таблица 2 - Рекомендации по выбору двигателя
Типовые требования различных технологических процессов | Рекомендации по выбору двигателя |
Продолжительная работа на низкой скорости | Принудительное охлаждение. При длительной эксплуатации подшипников на скорости ниже 10% от номинальной их производитель должен подтвердить такую возможность |
Широкий скоростной диапазон | Необходимо независимое от скорости охлаждение (независимая вентиляция или водяное охлаждение) |
Обратная связь по скорости | Меры предосторожности для механической связи. Датчик скорости по возможности должен быть электрически изолирован |
Продолжительная работа на высокой скорости (ослабление потока) | Различные аспекты механической части. Высокий критический момент (т.е. малое реактивное сопротивление рассеяния). Постоянное |
Питание от преобразователя для повышения КПД двигателя | Особая конструкция ротора (стержни ротора с низким коэффициентом вытеснения тока, см. 5.2). Может неблагоприятно повлиять на способность пуска от сети |
Пуски от сети или шунтирование на сеть | Конструкция ротора должна быть соответствующей. Следовательно, решение может и не быть оптимизировано в сторону уменьшения потерь и увеличения КПД - необходимо компромиссное решение |
Высокий пусковой момент | Если возможно, на частотах близких к нулю необходимо увеличить поток на 10-40% (в зависимости от размера двигателя) |
Просадка напряжения на преобразователе | Выбор номинального напряжения двигателя с учетом компенсации просадки напряжения на преобразователе |
Многодвигательные системы с поддержанием скорости | Схожие механические характеристики двигателей |
Для более тонкой настройки преобразователя в некоторых применениях у производителя можно затребовать электрические параметры эквивалентной схемы замещения двигателя (см. таблицу 3).
Таблица 3 - Параметры двигателя
Параметры | Описание/разъяснение | Скалярное управление | Векторное управление или прямое управление моментом и потоком |
Максимальные значения | |||
Максимальная скорость | - | Да | Да |
Максимальная температура обмоток двигателя | - | Да | Да |
Акустические параметры | |||
Частоты, которые должен обойти преобразователь, чтобы избежать резонанса | - | Да, если присутствуют интервалы несущей частоты | |
Механические параметры | |||
Момент инерции | Применения, где необходимо высокое ускорение | Дополнительно | Дополнительно |
Требуемый момент трения вентилятора охлаждения в виде полинома | Для промышленных применений, где требуется точное определение выходной механической мощности | Дополнительно | Дополнительно |
Электрические параметры Т-образной схемы замещения асинхронного двигателя | |||
Сопротивление статора ( | При рабочей температуре | Дополнительно, для IR-компенсации | Да |
Сопротивление ротора ( | При рабочей температуре | Дополнительно для точного скалярного управления | Да |
Реактивное сопротивление статора ( | При номинальной частоте | Дополнительно для точного скалярного управления | Да |
Реактивное сопротивление ротора ( | В номинальной рабочей точке, отличается от к.з. ротора | Дополнительно для точного скалярного управления | Да |
Индуктивное сопротивление цепи намагничивания ( | При основной частоте и номинальной рабочей точке | Дополнительно для точного скалярного управления | Да |
Проводимость цепи намагничивания ( | При основной частоте и номинальной рабочей точке | Дополнительно для точного скалярного управления | Да |
Реактивное сопротивление цепи намагничивания в функции напряжения | При ослаблении потока | Да, для точного скалярного управления | Да |
Обход критических скоростей в рабочем диапазоне | Скорость, запрещенная для установившегося режима (частотное окно) | Да | Да |
Поверхностный эффект ротора | Для точного определения гармонических потерь и температурных перегрузок в применениях с быстрым токовым откликом и прецизионным управлением | Дополнительно | Дополнительно |
Поверхностный эффект статора | Дополнительно | Дополнительно | |
Примечание 1 - Электрические параметры ротора ( Примечание 2 - Некоторые типы преобразователей не требуют задания активных и реактивных сопротивлений, так как определяют их сами. | |||
Указания относятся также к критическим скоростям вращения, при которых невозможна работа в продолжительном режиме.
Для более точного температурного анализа или в применениях, где необходимо точное управление высоким моментом на низких скоростях, для разработчика может быть очень полезной информация о теплоемкости и сопротивлении компонентов двигателя. Эти параметры могут зависеть как от частоты вращения, так и от частоты коммутации.
5 Потери и их влияние (для асинхронных двигателей, питаемых от инверторов напряжения)
5.1 Общие положения
При подключении двигателя к выходу инвертора напряжения для проектирования коммутационных цепей стандартная схема замещения не представляет существенного значения, зато большое влияние на потери оказывают сопротивления двигателя на частотах гармоник. Инвертор напряжения оказывает существенное влияние на питаемую им электрическую машину. Выходное напряжение имеет синусоидальный характер, при котором каждая полуволна представляет собой последовательность прямоугольных импульсов напряжения с крутым фронтом и почти постоянной амплитудой (двухуровневые инверторы снижают амплитуду изменений напряжения внутреннего звена постоянного тока).
При питании двигателя несинусоидальным напряжением кроме обычных потерь из-за основных гармоник напряжения и тока создаются дополнительные потери. Величина этих дополнительных потерь зависит от скорости, напряжения и тока, формы выходного напряжения преобразователя, а также конструкции и размеров двигателя. Для двухуровневых преобразователей при отсутствии различного рода фильтров эти потери могут составить от 10 до 30% от основных потерь и, таким образом, от 1 до 2% от номинальной мощности двигателя, однако их величина уменьшается с увеличением мощности самого двигателя. Для трехуровневых преобразователей дополнительные потери меньше: обычно от 0,2 до 1% от номинальной мощности.
При питании от преобразователя величина и характер дополнительных потерь зависят от конструкции двигателя, типа и параметров преобразователя, а также от используемых фильтров.
Общая сумма дополнительных потерь, вызванных гармониками, уменьшается с увеличением частоты переключения (см. рисунок 4). Этот эффект вызван небольшими дополнительными потерями обмотки при высоких частотах переключения.
|
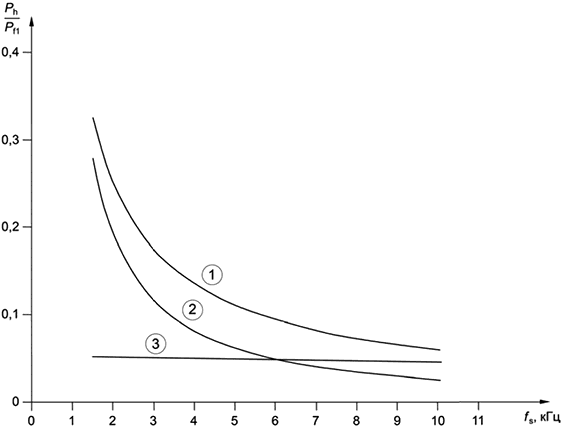
1 - суммарные потери от гармоник; 2 - гармонические потери в обмотках; 3 - гармонические потери в стали
Рисунок 4 - Пример зависимости потерь в электрической машине, вызванных гармониками ![]() относительно потерь
относительно потерь ![]() , на рабочей частоте
, на рабочей частоте ![]() и частоте коммутации
и частоте коммутации ![]() в случае питания от двухуровневого инвертора напряжения
в случае питания от двухуровневого инвертора напряжения
5.2 Источники дополнительных потерь при питании от инвертора и способы их устранения
Из-за пульсаций на выходе преобразователя полное сопротивление двигателя зависит от частоты. Потери в этом сопротивлении обусловлены в основном наличием поверхностного эффекта в проводниках (главным образом, в стержнях ротора, в некоторых случаях в проводниках статора), а также вихревыми токами в зонах потока рассеяния (особенно в листах магнитопровода).
Дополнительные потери из-за применения преобразователя могут быть минимизированы различными конструктивными мерами:
- применением ротора с меньшим коэффициентом поверхностного эффекта;
- применением обмотки статора с меньшим коэффициентом поверхностного эффекта;
- применением ротора с открытыми пазами;
- предотвращением коротких замыканий между листами ротора;
- уменьшением толщины листов статора и ротора для уменьшения потерь от вихревых токов;
- уменьшением потерь от вихревых токов посредством дросселей или фильтров.
5.3 Уменьшение потерь в двигателе с помощью преобразователя
5.3.1 Уменьшение основных потерь
Рисунок 5 иллюстрирует величину потерь в двигателе мощностью 37 кВт, 50 Гц, который питается от источника синусоидального напряжения и от инвертора напряжения с частотой коммутации импульсов 5,5 кГц, в режиме холостого хода и при номинальной нагрузке. Можно видеть, что дополнительные потери при питании от источника с широтно-импульсной модуляцией малы по сравнению с основными потерями.
|
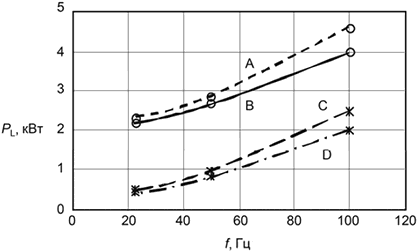
A - полная нагрузка, ШИМ-питание; B - полная нагрузка, синусоидальное питание; C - без нагрузки, ШИМ-питание; D - без нагрузки, синусоидальное питание
Рисунок 5 - Зависимость измеренных потерь ![]() от частоты
от частоты ![]() , нагрузки и типа питания
, нагрузки и типа питания
Главным преимуществом питания двигателя от преобразователя является возможность регулировки потока в зависимости от нагрузки (например, уменьшение потока при неполной нагрузке), благодаря чему снижаются основные потери, которые значительно выше дополнительных. Такая "оптимизация потока" часто используется в насосных и вентиляционных установках, для которых необходимый момент пропорционален квадрату скорости. При низких скоростях вращающий момент значительно меньше, поэтому он может быть создан при более слабом потоке и, следовательно, с более низкими потерями в двигателе.
Тот же принцип используется при "непрерывном управлении коэффициентом мощности" в применениях, где момент и/или скорость нагрузки изменяются. Поток двигателя регулируется таким образом, чтобы текущий коэффициент мощности оставался оптимальным.
Основные потери могут быть также уменьшены изменением параметров промежуточного звена постоянного тока.
5.3.2 Уменьшение дополнительных потерь при питании от инвертора
Дополнительные потери, обусловленные применением преобразователя, могут быть снижены посредством уменьшения гармонических составляющих выходного напряжения преобразователя:
- оптимизацией последовательности импульсов;
- увеличением частоты коммутации, при котором, как правило, дополнительные потери значительно снижаются при увеличении частоты пульсации на несколько кГц (см. рисунок 6). Однако с ростом частоты пульсации увеличиваются потери на коммутацию в преобразователе (см. рисунок А.1), в итоге сумма потерь минимальна при частоте в несколько кГц. Для преобразователей с релейным управлением или случайной частотой широтно-импульсной модуляции применяется усредненная частота коммутации, которая может зависеть от напряжения и тока;
- применением многоуровневого преобразователя.
|

Рисунок 6 - Зависимость дополнительных потерь ![]() от частоты коммутации
от частоты коммутации ![]() , при основной частоте 50 Гц (двигатель тот же, что на рисунке 5)
, при основной частоте 50 Гц (двигатель тот же, что на рисунке 5)
5.4 Использование фильтров для снижения дополнительных потерь в двигателе при питании от преобразователя
Фильтры на выходе преобразователя используются для уменьшения амплитуды и производной напряжения, коммутируемого с высокой частотой, при этом они не влияют существенно на низкочастотное результирующее напряжение, подаваемое на двигатель. Общий эффект зависит от характера нагрузки и параметров двигателя и фильтра. Падение напряжения на фильтре уменьшает подводимое к двигателю напряжение, что должно быть принято во внимание во избежание увеличения основных токовых потерь в двигателе. Кроме того, в фильтре возникают потери, но они будут ниже, чем сокращение дополнительных потерь из-за питания от преобразователя, и таким образом полный КПД электропривода увеличивается.
Кроме сокращения дополнительных потерь в двигателе при питании от преобразователя, такие фильтры содействуют уменьшению перенапряжений на обмотках двигателя, уменьшению пульсаций момента и улучшению электромагнитной совместимости EMC (см. 9.2). Однако динамика электропривода ухудшится, могут быть и другие ограничения из-за падения напряжения на фильтре.
5.5 Влияние температуры на ресурс
Основные и дополнительные потери, обусловленные нагрузкой двигателя и формой выходного напряжения преобразователя, преобразуются в тепло в обмотках двигателя. Причиной нагрева двигателя может быть ухудшение охлаждения в связи с изменением скоростного режима.
Есть несколько способов предотвратить этот эффект:
- использование системы независимого охлаждения, такой как IC0A6 или IC1A7 (см. МЭК 60034-6) для двигателя с воздушным охлаждением;
- использование изоляции более высокого класса нагрева (см. IEC 60034-1);
- полная компенсация температуры окружающей среды (см. IEC 60034-1);
- увеличение габаритов двигателя;
- оптимизация формы выходного напряжения преобразователя.
Примечание - Повышенные температуры могут затронуть не только изоляцию обмоток двигателя, но также и степень смазки подшипников и, следовательно, их ресурс.
Влияние переменной нагрузки и скорости на температуру обмоток двигателя характеризуется режимом работы, что описано в IEC 60034-1. Самые подходящие режимы работы для двигателей, питаемых от преобразователя, - S1 и S10. Режим S1 предусматривает максимальную разрешенную температуру, тогда как S10 (работа с переменной нагрузкой и скоростью) допускает кратковременные температурные перегрузки, которые превышают температурный предел для этого теплового класса. Температурные пределы указаны в IEC 60034-1:2010, формула для вычисления теплового ресурса приведена в приложении A настоящего стандарта.
5.6 Определение коэффициента полезного действия двигателя
Рекомендуемые методы для определения коэффициента полезного действия (КПД) двигателя даны в IEC 60034-2-1 и IEC 60034-2-2. Новый метод определения гармонических потерь в асинхронных двигателях, питаемых от инверторов напряжения, представлен в IEC 60034-2-3.
При необходимости более точного определения общих потерь (включая добавочные потери от гармоник) они должны определяться с учетом используемого преобразователя.
6 Шум, вибрация и крутильные колебания
6.1 Шум
6.1.1 Общие положения
При работе преобразователя появляются три фактора, непосредственно определяющие уровень шума:
- изменение скорости вращения от близкой к нулю до превышающей номинальную; непосредственное влияние оказывают подшипники, их смазка, вентиляция, а также другие факторы, связанные с изменением температуры;
- частота и гармонический состав напряжения питания двигателя, оказывающие значительное влияние на магнитные шумы в сердечнике статора и, в меньшей степени, на шум в подшипниках;
- торсионное и радиальное возбуждение в сердечнике статора из-за взаимодействия магнитных полей различной частоты в воздушном зазоре двигателя.
6.1.2 Влияние скорости на уровень шума
6.1.2.1 Подшипники скольжения
Уровень шума, производимого подшипниками скольжения, существенно не изменяется.
6.1.2.2 Подшипники качения
Частота шумов, производимых подшипниками качения, непосредственно зависит от скорости вращения. Если подшипники работают тихо на основной скорости, то маловероятно, что уровень шума значительно изменится при меньшей скорости. Однако когда скорость растет выше основной, возможно значительное увеличение уровня шума под действием гармоник основных частот из-за скольжения катящихся элементов. Проявление этого эффекта резко усиливается с увеличением фактора скорости более чем на 180 000 (диаметр подшипника в мм, умноженный на частоту вращения в об/мин). Опыт показывает, что повышению уровня шума можно противостоять, улучшив процесс смазки использованием масляной ванны или смазыванием парами масла.
При работе двигателя на предельно высоких скоростях в допустимом диапазоне температура в подшипниках будет выше, чем на низких скоростях. Поэтому важно убедиться в том, что в конструкции заложены адекватный номинальный зазор и/или демпфирующий монтаж.
При низких скоростях вполне пригодна консистентная смазка подшипников.
6.1.2.3 Вентиляционный шум
Уровень шума от установленного на валу вентилятора приближенно соответствует характеристике, показанной на рисунке 7 (для линейной скорости на периферии вентилятора до 50 м/с). Уровень шума снижается примерно до 15 дБ при снижении скорости на 50% и увеличивается примерно до 10 дБ при таком же увеличении скорости. Если электропривод нереверсивный, то эффективное сокращение шума может быть достигнуто благодаря использованию вентилятора с несимметричными лопастями.
|
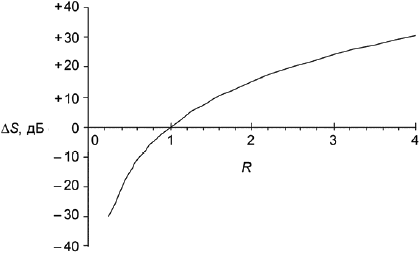
Рисунок 7 - Зависимость изменения шума вентилятора ![]() от относительной скорости
от относительной скорости ![]() вращения вентилятора
вращения вентилятора
6.1.3 Шум от магнитного потока
Магнитный шум существенно зависит от растягивающих усилий, возникающих в радиальном направлении расточки статора. Эти силы, называемые силами Максвелла, возбуждаются от взаимодействия магнитных полей в воздушном зазоре. Данные усилия характеризуются амплитудой, частотой и формой. При малых амплитудах растягивающие усилия приводят к усилению звука лишь в случае совпадения их частоты и формы с частотой собственных колебаний конструкции статора.
В случае синусоидального питания магнитный шум вызван пространственными гармониками поля в воздушном зазоре. Цель профессионального проектирования электрической машины - избежать резонанса при номинальном режиме ее работы. Однако ввиду большого разнообразия пространственных гармоник поля слышимый магнитный шум неизбежен при определенных скоростях, когда электрическая машина работает при постоянном потоке в широком диапазоне настройки скорости, даже когда напряжение питания является синусоидальным. Во избежание слишком интенсивной шумовой эмиссии эффективным часто является обход небольших резонансных зон. Это означает, что причиной магнитного шума является не специфика преобразователя, а переменная частота синусоидального питания.
Когда двигателем нужно управлять в широком скоростном диапазоне, резонанс неизбежен из-за переменной частоты питания. Этот эффект связан не со свойствами преобразователя, а с переменной частотой синусоидального напряжения питания.
Для двигателей, питаемых от преобразователя, нужно также учитывать влияние переменных в пространстве полей двигателя, вызванных гармониками токов статора и ротора. В связи с этим важно понять, что при проектировании электропривода создание оптимальных по уровню шума решений невозможно без согласованной работы конструкторов двигателей и разработчиков преобразователей.
Опыт показывает, что при частоте коммутации импульсов меньше чем 3 кГц частоты гармонических составляющих могут быть близки к естественным частотам колебаний конструктивных элементов средних и больших двигателей, предназначенных для работы в широком диапазоне скоростей. В таких случаях практически неизбежны режимы резонанса в некоторых зонах скоростного диапазона (см. рисунок А.2). Резонансные частоты для режимов =0 и
=2
![]() (см. рисунок 8, режимы
(см. рисунок 8, режимы =0; 2 и 4) ниже, чем 2,5 кГц для двух- и четырехполюсных двигателей с высотой вала более 315 мм. Подчеркнем, что тенденция увеличения частоты преобразователя до 4 или 5 кГц и выше приведет к возможности появления резонанса и в существенно меньших двигателях.
При питании двигателя от преобразователя с широтно-импульсной модуляцией приращение шума, по сравнению с уровнем шума в том же двигателе при питании от синусоидального источника, является относительно небольшим (несколько дБ/А) для частоты коммутации выше 3 кГц. При более низких частотах коммутации увеличение шума может быть существенным (до 15 дБ/А). В некоторых современных преобразователях с широтно-импульсной модуляцией уже не используются фиксированные частоты коммутации, поэтому они являются источником широкого спектра дополнительных частот. Таким образом, рост уровня типичных и индивидуальных шумов двигателя может быть значительно ограничен.
|
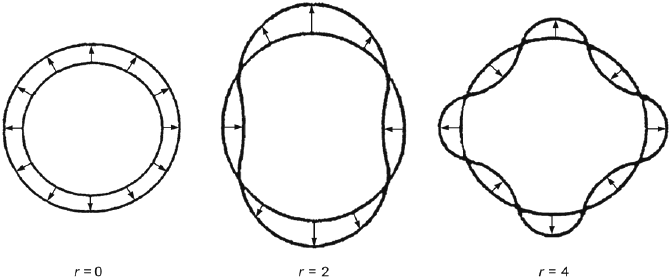
Рисунок 8 - Режимы вибрации сердечника статора
Может возникнуть необходимость создания "частотного окна" в рабочем диапазоне скорости во избежание резонанса на определенных частотах.
Оценка увеличения шума при работе двигателя от преобразователя приведена в IEC 60034-9:2007 (раздел 7).
6.1.4 Определение уровня шума и его пределы
6.1.4.1 Методы измерения
Уровни шума должны определяться в соответствии с IEC 60034-9 (см. 6.1.4.2).
6.1.4.2 Условия проведения измерений
Двигатель должен быть жестко закреплен на поверхности, соответствующей эксплуатационной. Измерения должны быть проведены при питании двигателя от преобразователя, аналогичного используемому на практике.
В качестве альтернативы и предпочтительно для машин большой мощности измерения можно выполнить и без нагрузки при постоянной скорости, используя источник синусоидального напряжения.
6.1.4.3 Предельные уровни шума
Предельные уровни звукового шума определены в IEC 60034-9:2007, в таблице раздела 7 которого приведены значения ожидаемых приращений уровня шума двигателей, питаемых от преобразователей различного типа.
6.2 Вибрация (без учета крутильных колебаний)
6.2.1 Общие положения
Уровень вибрации, производимой двигателем, питающимся от преобразователя, зависит от следующих факторов:
- конструкции электромагнитной системы двигателя;
- особенностей корпуса двигателя;
- крепления двигателя к основанию;
- жесткости вала;
- жесткости сцепления между валом двигателя и рабочим органом;
- формы выходного напряжения преобразователя.
Если преобразователь имеет приемлемые выходные характеристики, а также при надлежащем состоянии механической части двигателя и его крепежа, уровень вибраций, создаваемых этим двигателем, остается таким же, как и при его питании от синусоидального источника. Таким образом, для двигателей, питаемых от преобразователей с широтно-импульсной модуляцией, нет необходимости устанавливать уровни вибрации, отличные от тех, что установлены для двигателей, питаемых от синусоидальных источников, а также приведенных в IEC 60034-14.
В IEC 60034-14 приведены опытные пределы вибрации для двигателей, свободно установленных и жестко закрепленных. Полученные опытным путем графики отражают уровень вибрации, произведенный ни с чем не соединенным двигателем при определенных условиях его крепежа, а также отражающий его качество в целом. Когда двигатель является частью реальной установки, соединенной с рабочим органом, уровень вибрации будет иным.
Для двигателя, соединенного с рабочим органом, есть риск попадания в зоны механического резонанса при работе в широком скоростном диапазоне. Для решения этой проблемы можно запрограммировать контроллер так, чтобы частоты механического резонанса были "пропущены" (см. 4.3.8).
Поскольку множество факторов, влияющих на уровень вибрации, зависит от установки в целом, то решение этой проблемы невозможно только на этапе выбора собственно двигателя.
6.2.2 Определение уровня вибрации и его пределы
6.2.2.1 Метод измерения
Уровни вибрации должны определяться в соответствии с IEC 60034-14 (см. 6.2.2.2).
6.2.2.2 Условия проведения измерений
Желательно жесткое закрепление двигателя на поверхности, соответствующей эксплуатационной. Измерения должны быть проведены при питании двигателя от преобразователя, аналогичного реально используемому.
При соглашении между изготовителем и потребителем измерения можно выполнить без нагрузки при постоянной скорости, используя преобразователь или синусоидальный источник.
Примечание 1 - Следование этой рекомендации может значительно увеличить время испытаний, что соответствует IEC 60034-14.
Примечание 2 - Для измерений на месте следует обратиться к рекомендациям ISO 10816-3.
6.2.2.3 Предельные уровни вибраций
При проведении опыта в условиях, определенных в 6.2.2.2, желательно, чтобы вибрация, измеренная в корпусе подшипника, не превышала уровня A, приведенного в таблице 1 IEC 60034-14:2007.
6.3 Крутильные колебания момента
Постоянный во времени момент, обусловленный гармониками, оказывает незначительное влияние на работу двигателя. В отличие от него при питании двигателя от преобразователя на валу возможно появление колебаний момента, уровень и частота которых могут вызвать вибрацию момента в механически связанной системе в целом. Такая система должна быть тщательно проверена для предотвращения разрушающих механических резонансов.
При использовании инверторов с широтно-импульсной модуляцией частота основных колебаний момента определяется частотой коммутации, а амплитуда - шириной импульсов. Так, амплитуды колебаний момента могут превышать 15% номинального вращающего момента при условии, что частота коммутации превышает в 10 раз обычную частоту перехода. При более высоких частотах коммутации (порядка 21-кратной ![]() ) частоты колебаний момента 6
) частоты колебаний момента 6![]() и 12
и 12![]() при правильном формировании импульсов (например, при синусоидальной или пространственно-фазовой модуляции) практически незаметны. Помимо этого возбуждаются колебания момента двойной частоты коммутации. Однако они не вызывают значимого влияния до тех пор, пока их частоты далеки от критических частот механической части привода.
при правильном формировании импульсов (например, при синусоидальной или пространственно-фазовой модуляции) практически незаметны. Помимо этого возбуждаются колебания момента двойной частоты коммутации. Однако они не вызывают значимого влияния до тех пор, пока их частоты далеки от критических частот механической части привода.
Асимметрия выходного напряжения преобразователя предопределяет появление постоянной составляющей тока и токов обратной последовательности, следствием чего является появление 1-й или 2-й гармоники в колебаниях момента, что должно быть исключено. Должно быть принято во внимание то, что постоянный ток ограничен только активным сопротивлением, а токи отрицательной последовательности - полным сопротивлением короткого замыкания, поэтому малые напряжения асимметрии приводят к достаточно высоким асимметричным токам и, как следствие, к колебаниям момента. Эти колебания особенно опасны при попадании в частоту резонанса вала. Колебания момента могут приводить к повреждениям из-за зазоров в редукторе, сцеплении и прочих соединениях вала, если передающие момент элементы механической части в состоянии разъединиться и совершить "обратный удар".
7 Перенапряжения на изоляции двигателя
7.1 Общие положения
При питании от преобразователя система изоляции двигателя находится под действием более высокого напряжения, чем при питании от источника синусоидального переменного тока.
7.2 Причины перенапряжений
Форма напряжения на выходе преобразователя с инвертором напряжения представляет собой прямоугольные импульсы постоянной амплитуды с переменной шириной и частотой. Амплитуда выходного напряжения преобразователя не превышает напряжения на звене постоянного тока преобразователя [является базовой единицей при оценке перенапряжений в относительных единицах (о.е.)] и определяется величиной выпрямленного напряжения сети. Однако следует принимать во внимание наложение переходных процессов дифференциального и синфазного режимов по всей схеме электропривода, включая систему питания, преобразователь, заземление, кабели, фильтры, что должно быть тщательно проанализировано и учтено в соответствии с IEC/TS 61800-8.
Время нарастания напряжения на выходе в современных низковольтных преобразователях может составлять 50-400 нс. Эти отрезки времени сделаны короткими, насколько это возможно, чтобы минимизировать коммутационные потери в полупроводниках. Такие преобразователи могут создавать перенапряжения на обмотках двигателя, способные существенно уменьшить ресурс системы изоляции, если их величина превышает допустимый для системы уровень перенапряжения. На рисунке 9 показана совокупность пиков напряжения на клеммах двигателя, питаемого от инвертора напряжения с широтно-импульсной модуляцией, которые измерены при различных эксплуатационных режимах. Как видно, зависимость между количеством пиков, их величиной и временем роста импульса довольно сложна. Однако риск повреждения изоляции (из-за частичного разряда, см. 7.3 и 7.6) в основном обусловлен пиками с высоким напряжением и коротким временем его нарастания, которые расположены в правой части представленной ниже диаграммы, что особенно наглядно при обзоре со стороны шкалы ![]() .
.
|

![]() - амплитуда перенапряжения (о.е.);
- амплитуда перенапряжения (о.е.); ![]() - время нарастания импульса (нс);
- время нарастания импульса (нс); - количество перенапряжений в секунду
Рисунок 9 - Диаграмма перенапряжений на клеммах двигателя при питании от ШИМ-преобразователя
В зависимости от времени нарастания напряжения импульсов на выходе преобразователя, длины кабеля и полного сопротивления двигателя амплитуды перенапряжения на клеммах двигателя могут достигать двукратных значений относительно линейного и фазного напряжений. Эти перенапряжения создают отраженные волны в кабеле между клеммами преобразователя и двигателя в соответствии с их сопротивлениями. Амплитуда перенапряжений зависит от формы выходного напряжения преобразователя, длины кабеля между преобразователем и двигателем, а также от сопротивлений двигателя. Данное явление количественно описывается с использованием аппарата теорий длинных линий и распространения волн с учетом гармонического состава выходного напряжения. При уменьшении длительности фронта импульсов выходного напряжения преобразователя увеличиваются частоты гармоник, присутствующих в кривой напряжения.
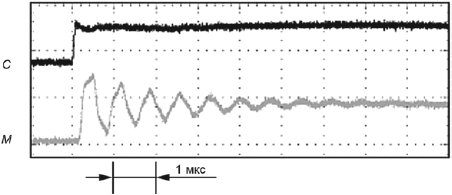
Типичные импульсы напряжения, измеренные на выходе преобразователя и на клеммах двигателя, приведены на рисунке 10, а на рисунке 11 представлены передние фронты импульсов этих напряжений в увеличенном масштабе времени. Для обеспечения всестороннего анализа см. IEC TS 61800-8.
|

C - фазное напряжение преобразователя; M - фазное напряжение двигателя
Рисунок 10 - Типичные импульсы напряжения в одной фазе преобразователя и на клеммах двигателя (2 мс/деление)
|
C - фазное напряжение преобразователя; M - фазное напряжение двигателя
Рисунок 11 - Передние фронты импульсов напряжения с малым временем нарастания (см. рисунок 10, 1 мкс/деление)
Эксперименты свидетельствуют о том, что при увеличении длины кабеля импульсное перенапряжение обычно увеличивается до максимума, а затем уменьшается. При этом время нарастания импульсов напряжения на клеммах двигателя увеличивается. Пики перенапряжения уменьшаются, когда преобразователи установлены близко от подключенных двигателей и длина кабеля между преобразователем и двигателем мала.
7.3 Перенапряжение в обмотках
Перегрузка изоляции обмоток двигателя обусловлена пиковыми значениями и временем нарастания импульсов напряжения на клеммах двигателя (см. рисунок 12), а также частотой импульсов, вырабатываемых инвертором.
Один вид перегрузки обусловлен уровнем напряжения, приложенного к основной изоляции (между фазами или между фазой и землей) катушек обмотки. Другой тип ограничен внутренней межвитковой изоляцией и обусловлен временем нарастания импульсов. Импульсы с коротким фронтом приводят к напряжению, неравномерно распределяемому по объему катушек, при его высоком уровне в пределах нескольких первых витков фазной обмотки.
|
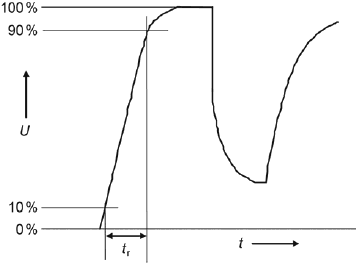
Рисунок 12 - Определение времени нарастания импульса напряжения на клеммах двигателя
На рисунке 7 IEC 60034-18-41:2014, который воспроизводится здесь как рисунок 13, показано распределение наихудшего случая напряжения на возможно смежных первом и последнем витках обмотки с произвольной намоткой в зависимости от времени нарастания.
Если нет более точной информации, то это можно рассматривать как ожидаемый наихудший случай напряжения, нагружающего межвитковую изоляцию электрической машины.
Чем короче время нарастания импульса, тем большее напряжение приложено к первому витку катушки.
|
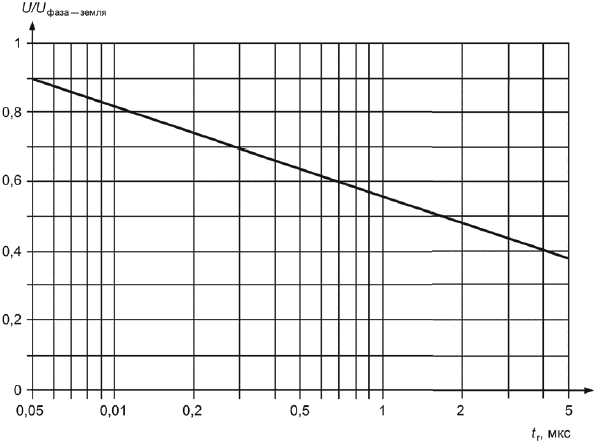
![]() - напряжение на первичном витке (в процентах от напряжения между фазой и землей);
- напряжение на первичном витке (в процентах от напряжения между фазой и землей); ![]() - время нарастания импульса
- время нарастания импульса
Рисунок 13 - Напряжение на первичном витке как функция времени нарастания импульса
Наличие на клеммах двигателя импульсов с коротким передним фронтом является причиной высокого межвиткового напряжения на первичных витках каждой фазной обмотки, что может приводить к пробоям межвитковой изоляции. Такие явления часто происходят из-за неадекватных диэлектрических свойств эмалированных проводов.
7.4 Ограничения и ответственность
7.4.1 Электрические машины напряжением до 1000 В
Система изоляции электрических машин напряжением до 1000 В, специально предназначенных для работы от преобразователей, может быть квалифицирована в соответствии со стандартом IEC 60034-18-41 (без частичных разрядов типа I) или стандартом IEC 60034-18-42 (с частичными разрядами типа II), что указывается в документации и на заводской табличке электрической машины. Ответственность за указание свойств изоляции электрической машины лежит на ее производителе.
Для применения в электроприводах общего пользования рекомендуемым является класс изоляции по импульсному напряжению C/B по таблице 4, взятой из таблицы С.1 IEC 60034-18-41:2014. Производитель должен гарантировать соответствие электрической машины значениям, приведенным в таблице 4 (IEC 60034-18-41:2014, приложение C).
Более высокие и низкие значения, как и различные комбинации классов P-P, P-G, T-T для специальных применений, представлены в IEC 60034-18-41:2014, приложение C, для того чтобы экономично и надежно сочетать требования системы со свойствами изоляции.
Чтобы не допустить заметного уменьшения срока службы изоляции двигателя, реальное перенапряжение, обусловленное работой преобразователя, должно быть ниже класса изоляции по импульсному напряжению (КИИН) изоляции типа I по IEC 60034-18-41 или изоляции типа II по IEC 60034-18-42 (следующее издание IEC 60034-18-42 будет также содержать КИИН).
Необходимо иметь в виду, что в зависимости от структуры электропривода могут появиться существенно более высокие напряжения. Возможные перенапряжения могут быть оценены по IEC/TS 61800-8 с учетом структуры и режима работы преобразователя, типа и длины кабелей, вида заземления и т.п. Существенные для оценки изоляции параметры - переходные значения размаха напряжения, время нарастания, частота следования импульсов и т.п.
Системный интегратор несет ответственность за правильную оценку уровней перенапряжения на клеммах двигателя (в приложении C дан пример расчета этих перенапряжений).
В случае если реальные или ожидаемые уровни превышают предельные значения для соответствующего класса изоляции, приведенные в таблице 4, должна быть изменена структура электропривода или выбран другой класс изоляции двигателя. На системном интеграторе лежит ответственность как на проведении подобных изменений, так и на согласовании специальных требований между производителями машины и преобразователя. Методы снижения изоляционных перегрузок приведены в разделе 7.5.
Таблица 4 - Рабочее напряжение на клеммах двигателя, отнесенное к номинальному ![]() , при котором машина может надежно работать без специальных соглашений между системным интегратором и производителями
, при котором машина может надежно работать без специальных соглашений между системным интегратором и производителями
Класс изоляции по импульсному напряжению | Допустимый размах рабочего напряжения относительно номинального | |
Фаза-фаза C | Фаза-земля B | |
IVIC C/B | 5,9 | 3,1 |
(Комментарии см. IEC 60034-18-41:2014, приложение C.)
Примечание 1 - Производитель машины должен быть уверен, что она соответствует данным уровням.
Примечание 2 - Предметом соглашения между производителем и системным интегратором может быть специальная сборка электропривода.
7.4.2 Электрические машины на напряжение свыше 1000 В
Система изоляции электрических машин напряжением свыше 1000 В, специально предназначенных для работы от преобразователей, может быть квалифицирована в соответствии со стандартом IEC 60034-18-42 (с частичными разрядами типа II), что указывается в документации и на заводской табличке электрической машины. Ответственность за указание свойств изоляции электрической машины лежит на ее производителе.
Чтобы не допустить заметного уменьшения срока службы изоляции двигателя, реальное перенапряжение, обусловленное работой преобразователя, должно быть ниже пределов, заявленных производителем машины.
7.5 Методы уменьшения перенапряжения
В данной ситуации существует ряд возможных способов снизить возможные скачки напряжения. Они обсуждаются при рассмотрении всего комплекса системы электропривода. Большинство влияющих факторов может быть рассчитано в соответствии IEC/TS 61800-8. В приложении C представлен простой пример расчета.
7.6 Ограничение перенапряжения изоляции
Верхним уровнем, при котором перенапряжения становятся опасными, является уровень напряжения, приводящего к возникновению частичных разрядов (PDIV), или уровень начала коронного разряда в воздухе (CIV). Частичные разряды вызывают разрушение системы изоляции вследствие химической и механической эрозии. Степень разрушения зависит от энергии и частоты возникновения частичных разрядов.
На уровни напряжений, возникновения частичных разрядов и начала коронного разряда в двигателе влияют:
- тип обмотки;
- материал, примененный для изоляции фаз;
- тип лакового покрытия;
- диаметр обмоточного провода (чем больше диаметр, тем выше напряжение возникновения частичных разрядов);
- тип изоляции обмоток;
- толщина эмали (чем толще эмаль, тем выше напряжение возникновения частичных разрядов);
- рабочая температура (чем она выше, тем ниже напряжение возникновения частичных разрядов, обычно - на 30% при повышении от 25 до 155°C);
- состояние окружающей среды (состав и давление среды);
- состояние изоляции (загрязнение, увлажнение и т.д.).
На рисунке 14 показан отдельный импульс разряда, который явился результатом импульса напряжения на одной фазе двигателя, питаемого от преобразователя.
Примечание - Разряд происходит на переднем фронте импульса напряжения преобразователя, когда перенапряжение на изоляции достигает уровня пробоя
|
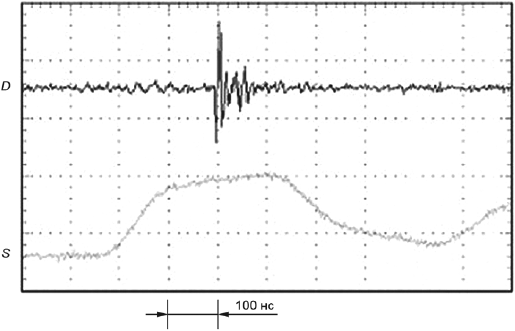
S - импульс напряжения на клеммах двигателя; D - импульс разряда
Рисунок 14 - Импульс разряда на клеммах двигателя (100 нс/деление)
8 Электрические токи через подшипники
8.1 Источники токов через подшипники в двигателях, питаемых от преобразователей
8.1.1 Общие положения
Токи через подшипники могут быть вызваны различными причинами. Во всех случаях ток через подшипники будет протекать тогда, когда напряжение, приложенное к подшипникам, достаточно, чтобы пробить изоляцию смазки. Существуют несколько источников этого напряжения.
Примечание - Ряд вспомогательных устройств, таких как энкодеры, тахогенераторы, согласно 9.1.4.4 могут быть повреждены этими токами.
8.1.2 Магнитная асимметрия
Асимметрия магнитопровода двигателя создает условия для появления низкочастотных токов через подшипники. В большей степени это явление распространено в двигателях мощностью свыше 400 кВт. Асимметрия магнитопровода вызывает появление кругового переменного потока (кольцевой поток) в ярме двигателя. Это обуславливает появление переменного напряжения в проводящем контуре, включающем вал двигателя, подшипники, боковые щиты и внешний кожух двигателя. Если уровень индуцированного напряжения будет достаточным для того, чтобы пробить изоляцию, обусловленную смазкой, то ток будет течь через контур, включающий оба подшипника.
8.1.3 Накопление электростатического заряда
Электрическое напряжение на подшипниках может быть вызвано накоплением электростатического заряда на валу, обусловленного приводимой в движение нагрузкой, например такой, как вентилятор ионизационного фильтра.
8.1.4 Высокочастотные напряжения
Высокочастотное напряжение синфазной помехи на зажимах двигателя вызывает синфазные токи, часть которых может течь через подшипники двигателя или приводимого в движение оборудования.
Токи синфазных помех могут также создавать напряжение на подшипниках в результате работы преобразователя. Эти эффекты являются следствием использования полупроводниковых ключей с быстрой коммутацией и могут вызвать проблемы в подшипниках из-за различных эффектов в двигателях всех габаритов. Эти эффекты описаны подробно в 8.2.
8.2 Образование высокочастотных токов через подшипники
8.2.1 Общие положения
Самыми главными факторами, определяющими наиболее важный механизм явления, являются размер двигателя и способ заземления корпуса и вала двигателя. Электроустановка, предполагающая подходящий тип кабеля и надлежащее соединение с заземляющими проводниками и оболочками, играет такую же важную роль, как и номинальное входное напряжение преобразователя и/или крутизна нарастания выходного напряжения инвертора. Источником токов через подшипники является напряжение, приложенное к подшипникам. Существуют три типа высокочастотных токов через подшипники: компенсационный ток, ток заземления вала и ток емкостного разряда.
Два типа токов через подшипники, высокочастотный компенсационный (![]() ) и ток заземления вала (
) и ток заземления вала (![]() ) показаны схематично на рисунке 15. На них существенно влияют способы заземления и сопротивление заземления.
) показаны схематично на рисунке 15. На них существенно влияют способы заземления и сопротивление заземления.
8.2.2 Уравнительный ток
В больших двигателях высокочастотное напряжение индуцируется в замкнутом контуре, описанном в 8.1.2, магнитным потоком высокой частоты, циркулирующим по ярму статора. Этот поток вызван емкостными токами, протекающими от обмотки к пластинам статора. Индуцированное напряжение на валу может воздействовать на подшипники. Если оно достаточно высоко для того, чтобы пробить изоляцию слоя смазки подшипников, то возникает уравнительный ток для уравновешивания потока в статоре, охватывающем вал, подшипники и станину статора.
Эти высокочастотные токи могут накладываться на низкочастотные, образующиеся, как описано в 8.1.2.
8.2.3 Ток заземления вала
Ток утечки в станину статора должен течь обратно к преобразователю, являющемуся источником тока. Любой путь назад обладает сопротивлением, следовательно, напряжение на станине двигателя увеличивается по сравнению с исходным уровнем. Если вал двигателя заземлен через ведомый механизм, увеличение напряжения на корпусе двигателя обнаруживается на подшипниках. Если повышение напряжения достаточно высоко для преодоления изолирующей способности пленки смазки подшипников, то часть тока может течь через этот подшипник, вал и ведомый механизм обратно к преобразователю.
|
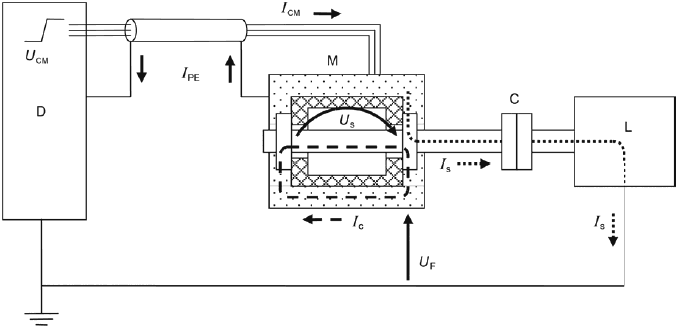
D - преобразователь; M - двигатель; C - муфта, соединяющая валы; L - приводимая в движение нагрузка
|
|
|
|
|
Рисунок 15 - Возможные токи, протекающие через подшипники
8.2.4 Ток емкостного разряда
Распределение внутреннего напряжения на напряжение синфазной помехи через внутренние емкости двигателя может обусловить достаточно высокое напряжение для создания высокочастотных импульсов тока в подшипниках (называемых токами электростатического разряда при механической обработке). Это может случиться, если вал не заземлен через ведомый механизм, в то время как корпус двигателя связан с землей для обеспечения безопасности.
8.3 Цепь синфазной помехи
8.3.1 Общие положения
Цепь синфазной помехи - это замкнутый контур для циркулирующего тока, текущего в пределах всей системы, включая двигатель и его подшипники, нагрузку и преобразователь.
Типичный трехфазный синусоидальный источник электропитания уравновешен и симметричен при нормальных условиях. Таким образом, напряжение нейтрали равно нулю. Однако дело обстоит не так при трехфазном источнике электропитания с ШИМ-коммутацией, в котором постоянное напряжение преобразуется в трехфазные напряжения. Даже при том, что основные гармоники выходных напряжений являются симметричными и сбалансированными, невозможно сделать сумму трех выходных напряжений в каждый момент времени равной нулю только с двумя возможными доступными уровнями выходного напряжения. Получающееся напряжение в нейтральной точке не равно нулю. Это напряжение - источник синфазной помехи. Оно измеряется в нейтральной точке звезды обмоток двигателя (или в искусственной нейтральной точке звезды при соединении обмоток двигателя, отличных от звезды) при любой нагрузке. Напряжение пропорционально напряжению на шине постоянного тока, и его основная частота равна частоте коммутации преобразователя.
В любой момент времени, когда один из трех выходов преобразователя изменяет потенциал, ток, пропорциональный этому изменению напряжения, вынужден течь на землю через емкостные связи с землей всех компонентов выходной цепи. Ток течет к источнику через заземляющий проводник и емкости преобразователя.
8.3.2 Протекание тока синфазной помехи
Путь тока утечки от корпуса двигателя к корпусу преобразователя включает корпус двигателя, защитную оболочку кабеля или заземляющих проводников и, возможно, проводящие части конструкции сооружения. Все эти элементы содержат индуктивность. Протекание тока синфазной помехи через такую индуктивность вызовет снижение напряжения, которое поднимает потенциал корпуса двигателя относительно корпуса преобразователя. Это напряжение корпуса двигателя является частью напряжения синфазной помехи преобразователя. Ток синфазной помехи будет искать путь с наименьшим сопротивлением. Если в данной цепи будет присутствовать высокое сопротивление, например в соединении земли с корпусом двигателя, то напряжение на корпусе двигателя обусловит ответвление части тока синфазной помехи в данном направлении. В реальных установках существуют многочисленные параллельные ветви. Большинство из них имеет незначительное воздействие на величину тока синфазной помехи или токов подшипников, но может быть существенным в соответствии с требованиями ЭМС.
Однако если величина индуктивности элементов конструкции и цепи достаточно высока, может возникнуть падение напряжения более 100 В между корпусом двигателя и корпусом преобразователя. Если в таком случае вал двигателя связан через металлическое соединение с корпусом редуктора или другими ведомыми механизмами, которые глухо заземлены и имеют тот же потенциал, что и корпус преобразователя, то, возможно, часть тока синфазной помехи потечет через подшипники двигателя, вал и ведомый механизм в преобразователь.
Если вал механизма не имеет прямого контакта с землей, то ток может протечь через корпус редуктора или подшипники механизма. Эти подшипники могут быть повреждены прежде, чем подшипники двигателя.
8.4 Паразитные емкости
8.4.1 Общие положения
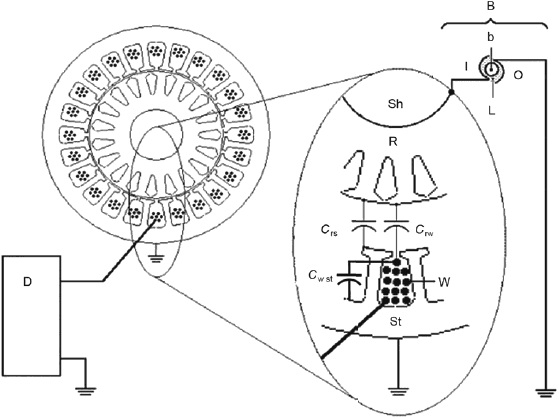
Паразитные емкости в двигателе (см. рисунок 16) очень малы и представляют высокое сопротивление для низких частот, блокируя таким образом низкочастотные токи. Однако импульсы с крутым фронтом, вырабатываемые современными преобразователями, содержат столь высокие частоты, что даже маленькие емкости в двигателе обеспечивают цепь с малым сопротивлением для протекающего тока.
|
- преобразователь;
![]() - вал;
- вал; ![]() - ротор;
- ротор; ![]() - статор;
- статор; ![]() - обмотка;
- обмотка; ![]() - емкость ротор-статор;
- емкость ротор-статор; ![]() - емкость обмотки ротора;
- емкость обмотки ротора; ![]() - емкость обмотки статора;
- емкость обмотки статора; - подшипник;
- шарики или ролики;
- внутреннее кольцо;
![]() - внешнее кольцо;
- внешнее кольцо; - пленка смазки
Рисунок 16 - Емкости двигателя
8.4.2 Главная составляющая емкости
Наибольшая доля емкости в двигателе образуется между обмотками статора и корпусом двигателя. Эта емкость распределена вдоль окружности и по длине статора. Высокочастотная составляющая тока, входящего в катушку статора, больше, чем выходящая из нее из-за токов утечки.
Этот результирующий осевой ток создает высокочастотный кольцевой магнитный поток, циркулирующий в пластинах статора, вызывая осевое напряжение в контуре, описанное в 8.1.2. Если напряжение на валу становится достаточно большим, циркулирующий высокочастотный ток может течь через вал и оба подшипника, а в некоторых случаях - через вал и подшипники механизма нагрузки. Этот циркулирующий ток обычно является причиной повреждения подшипников при типичных пиковых величинах от 3 до 20 А, в зависимости от размера двигателя, скорости нарастания напряжения на клеммах двигателя и уровня напряжения звена постоянного тока.
8.4.3 Прочие емкости
Емкость между обмоткой статора и пластинами сердечника является важным элементом цепи синфазной помехи. Есть и другие емкости, такие как емкость между выступами обмоток статора и ротором или та, что существует в воздушном зазоре двигателя между железом статора и поверхностью ротора. Подшипники сами по себе также обладают емкостью.
Быстрые изменения напряжения синфазной помехи от преобразователя могут привести не только к токам в емкости вдоль окружности и длины двигателя, но также и к токам между обмотками статора и ротором с подшипниками.
Текущий в подшипниках ток может быстро измениться в зависимости от состояния подшипников. Например, присутствие емкости в подшипниках подтверждает, что пока шарики подшипников покрыты смазкой, ток они не проводят.
Эта емкость может быть закорочена, если напряжение на подшипниках превышает значение порога пробоя или если пленка смазки подшипников исчезла и происходит контакт обоих колец подшипников. При очень низкой скорости подшипники могут также иметь металлический контакт из-за отсутствия изолирующей пленки смазки.
8.5 Последствия больших токов в подшипниках
На рисунках 17 и 18 показаны типичные повреждения подшипников из-за токов синфазных помех и электрического разряда.
|
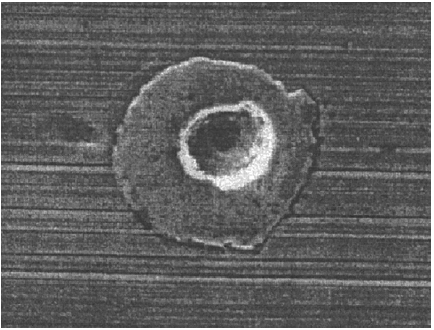
Рисунок 17 - Точечная коррозия подшипников из-за электрического разряда
(диаметр коррозионной язвины 30 мкм вплоть до 50 мкм)
|

Рисунок 18 - Появление бороздок из-за чрезмерного тока в подшипниках
8.6 Предотвращение повреждений от высокочастотного тока в подшипниках
8.6.1 Основные способы
Существуют три основных способа, используемых для предотвращения высокочастотных токов в подшипниках, которые могут применяться раздельно или в комбинациях:
- специальная прокладка кабеля и система заземления;
- ликвидация токов в подшипниках;
- демпфирование высокочастотной синфазной помехи.
Все они имеют целью уменьшить напряжение на смазке подшипников до величины, не вызывающей высокочастотные импульсы тока в подшипниках или снижающей величину пульсаций до уровня, не оказывающего воздействия на срок службы подшипников. Для различных типов высокочастотных токов в подшипниках должны быть приняты различные меры.
Основой всех решений по высокочастотным токам является надлежащая система заземления. Правила эксплуатации заземления стандартного оборудования главным образом разработаны для обеспечения достаточно низкого сопротивления соединения, для защиты людей и оборудования от пробоев изоляции в питающей сети. Для ограничения высокочастотных токов синфазных помех в электроприводе с регулируемой скоростью эффективное заземление обеспечивается при соблюдении принципов, описанных в разделе 9.
8.6.2 Другие профилактические меры
- Применение изолированных подшипников.
Примечание - На практике для подшипников используется изоляция различной толщины и размещенная в различных местах (например, между валом и внутренним кольцом подшипника, между внешним кольцом подшипника и корпусом). Общепринятыми являются антифрикционные подшипники с керамическим покрытием на внешней поверхности (так называемые подшипники с антифрикционным покрытием). Пригодны также подшипники с керамическими элементами вращения.
- Применение фильтра, который уменьшает напряжение синфазной помехи и/или du/dt.
- Применение непроводящих соединений для нагрузки или других устройств, которые могут быть повреждены токами через подшипники.
- Применение щеточных контактов между валом и корпусом двигателя.
- Применение, если возможно, двигателя и преобразователя с пониженным напряжением.
- Запуск преобразователя на наиболее низкой частоте коммутации, которая удовлетворяет требованиям по шуму и температуре.
- Исключение двойных фронтов (параллельной коммутации).
В таблице 5 приведено сопоставление эффективности некоторых из этих профилактических мер.
Таблица 5 - Эффективность мер подавления токов в подшипниках
Мера подавления | Тип токов | Дополнительные | ||
Контурные (см. 8.1.2, 8.2.2) | Заземления вала (см. 8.2.3) | Емкостного разряда (см. 8.2.4) | замечания | |
1) Изолированный подшипник на свободном конце вала или применение керамических вращающихся элементов | Эффективно | Не эффективно. Защищает только один подшипник | Не эффективно. Защищает только один подшипник | Изоляция свободного конца вала во избежание потребности в изолированном соединении |
2) Изолированные подшипники на обоих концах вала или применение керамических вращающихся элементов | Эффективно. Один изолированный подшипник достаточен для этого типа тока | Эффективно | Эффективно. Может потребоваться дополнительный щеточный контакт | Наиболее эффективно для корпусов малых размеров. Менее практично для корпусов больших размеров |
3) Изоляция с обеих сторон или применение керамических вращающихся элементов + дополнительное изолирующее соединение и заземление вала через щетки | Эффективно | Эффективно | Эффективно | Наиболее эффективно для корпусов больших размеров. Помогает предотвратить возможное повреждение ведомой нагрузки Необходимо обслуживание |
4) Один щеточный контакт. Изоляция подшипников отсутствует | Не эффективно. Защищен только один подшипник | Эффективно. Не защищает подшипники на приводном валу | Эффективно. Необходимо низкое сопротивление щеточного контакта | Необходимо обслуживание |
5) Два щеточных контакта на свободном и приводном концах вала. Подшипники не изолированы | Эффективно. Необходимо низкое сопротивление щеточного контакта | Эффективно. Не защищает подшипники на приводном валу | Эффективно. Необходимо низкое сопротивление щеточного контакта | Необходимо обслуживание |
6) Низкое сопротивление смазки и/или углеродистое уплотнение в подшипниках | Недостаточно | Недостаточно | Эффективно. Эффект зависит от состояния материалов | Нет длительного опыта работы. Эффективность смазки снижается |
7) Ротор в экранированной камере (клетке Фарадея) | Не эффективно | Не эффективно | Весьма эффективно | Проблемы в генерируемых преобразователем уравнительных токах, что характерно для больших двигателей |
8) Фильтр напряжения синфазных помех | Эффективно. Уменьшает высокочастотное напряжение, также понижает низкочастотные токи | Эффективно | Эффективно | Наибольшее сокращение напряжения синфазной помехи, если фильтр смонтирован на выходе преобразователя |
9) Изолированное соединение | Не эффективно | Весьма эффективно | Не эффективно | Также предотвращает возможное повреждение приводимой в движение нагрузки |
10) Корпус для приводного соединения | Не эффективно | Эффективно | Не эффективно | Также предотвращает возможное повреждение приводимой в движение нагрузки |
8.6.3 Другие факторы и особенности, влияющие на токи подшипников
- Большой физический размер или высокая выходная мощность механизма ведет к увеличению индуцированного на валу напряжения.
- Физическое состояние двигателя также влияет на индуцированное на валу напряжение: короткая форма с большим диаметром обычно лучше, чем длинная и тонкая конструкция двигателя.
- Большое число полюсов ведет к уменьшению индуцированного на валу напряжения.
- Большое число пазов статора ведет к увеличению напряжения на валу.
- Высокий критический момент означает малое реактивное сопротивление и большое напряжение на валу.
- Короткий кабель двигателя увеличивает индуцированное напряжение на валу.
- Малая рабочая скорость и высокая температура подшипников, как и высокая нагрузка подшипников, увеличивают опасность тока в подшипниках из-за более тонкой смазывающей пленки.
- Роликовые подшипники более уязвимы, чем подшипники скольжения, но имеют более высокую износостойкость, чем шарикоподшипники, из-за более высоких зазоров и емкости.
- Высокочастотная цепь преобразователя может значительно увеличить напряжения в подшипниках в зависимости от способа заземления.
- Двигатели с контактными кольцами, питаемые от преобразователей с инверторами напряжения в цепи ротора, требуют особого внимания, потому что коэффициент напряжения в подшипнике ![]() намного выше (
намного выше (![]() 1), чем в двигателях с питанием по статору.
1), чем в двигателях с питанием по статору.
8.7 Дополнительные соображения для двигателей, питаемых от высоковольтных преобразователей - источников напряжения
8.7.1 Общие положения
Все утверждения о токах в подшипниках, сделанные выше относительно низковольтных двигателей, питаемых от преобразователей с инверторами напряжения, действительны в целом и для двигателей и преобразователей высокого напряжения, однако имеются несколько показанных ниже отличий.
- Высоковольтные двигатели обычно имеют большую мощность (от сотен киловатт) и обладают довольно большими размерами корпуса, поэтому, как правило, они имеют один изолированный подшипник.
- Более толстая изоляция паза уменьшает емкость между обмоткой и сердечником, уменьшая также ток синфазной помехи двигателя и ток через подшипник.
- С другой стороны, скачки напряжения синфазной помехи намного больше в преобразователях высокого напряжения и, несмотря на большее число уровней, увеличивают опасность компенсационного тока.
- Из-за высокого напряжения в звене постоянного тока амплитуда напряжения синфазной помехи высока, и поэтому опасность емкостного разряда тока подшипников значительна (коэффициент напряжения в подшипниках высоковольтных двигателей находится на том же уровне, что и в низковольтных двигателях).
8.7.2 Защита подшипников в короткозамкнутых асинхронных и синхронных бесколлекторных двигателях с постоянными магнитами
Высокое напряжение в цепи промежуточного звена преобразователя и физический размер двигателя обусловливают особые требования к защите подшипников. Следует использовать изолированную конструкцию для обоих подшипников или применять один изолированный подшипник (на свободном конце вала) и щетку, заземляющую вал с приводной стороны, или эффективный фильтр синфазной помехи на выходе преобразователя (см. таблицу 5).
8.7.3 Защита подшипников двигателей с контактными кольцами и синхронных двигателей с независимым возбуждением
Поскольку двигатель уже имеет контактные кольца и щетки, защита подшипников может достигаться дополнительными щетками, заземляющими вал на обоих концах. В качестве альтернативы может быть выбран другой применимый метод из таблицы 5.
8.8 Защита от тока через подшипники для двигателей, питающихся от высоковольтных преобразователей с инверторами тока
Практический опыт и испытания показали, что преобразователь со свойствами источника тока оказывает небольшое влияние на напряжение на валу и нет необходимости в специальных мерах для защиты подшипников.
Заземляющие щетки на валу рекомендуются только для двигателей с контактными кольцами, питаемых от преобразователей с инверторами тока в цепи ротора.
9 Монтаж
9.1 Заземление, монтаж и кабельная разводка
9.1.1 Общие положения
Приводимые далее сведения являются только общим руководством по использованию проводников для защитного заземления и подсоединения двигателя, а также по надежности и электромагнитной совместимости элементов установки. При создании конкретных установок необходимо обеспечивать соблюдение местных правил заземления и согласование с системным интегратором. Должны также соблюдаться инструкции поставщика преобразователя относительно электромагнитной совместимости. Для получения дополнительной информации об электромагнитной совместимости и безопасности систем силового электропривода смотрите МЭК 61800-3 и МЭК 61800-5-1. Для всестороннего руководства по общим методам электромагнитной совместимости установок смотрите также МЭК 61000-5-1 и МЭК 61000-5-2.
9.1.2 Заземление
9.1.2.1 Задачи заземления
Задачами заземления являются безопасность и надежная работа без помех. Традиционное заземление обосновано электрической безопасностью. Оно помогает гарантировать безопасность персонала, а также избежать повреждения оборудования из-за коротких замыканий. Для работы без помех системам силового электропривода необходимы более действенные методы, гарантирующие эффективность заземления при высоких частотах. Это может потребовать использования эквипотенциальных заземляющих поверхностей на этажах здания, оболочках оборудования и печатных платах.
Кроме того, правильное заземление значительно понижает напряжения на валу и корпусе двигателя, уменьшая высокочастотные токи в подшипниках и предотвращая преждевременный отказ подшипников, а также снижая возможность повреждения вспомогательного оборудования (см. раздел 8). Конфигурация заземления может также повлиять на уровни перегрузки по напряжению изоляции между фазой и землей (см. 7.4).
9.1.2.2 Заземляющие кабели
Заземляющие кабели, обеспечивающие безопасность, имеют размеры, зависящие от конкретной ситуации, в соответствии с региональными правилами. Соответствующий выбор характеристик кабеля и правил его прокладки также помогает уменьшить уровень электрических напряжений, приложенных к различным элементам электропривода, и поэтому увеличивает его надежность. Кроме того, тип кабеля должен соответствовать требованиям электромагнитной совместимости.
9.1.3 Подсоединение двигателей
Подсоединение должно быть осуществлено таким образом, чтобы не только соответствовать требованиям безопасности, но и улучшать характеристики электромагнитной совместимости установки. Для соединительных шин подходящими проводниками являются сплошные и перфорированные металлические полосы и круглые кабели. Для высокочастотных систем предпочтительны металлические полосы или плетеные кабели. Типичное соотношение размеров "длина/ширина" для этих полос должно быть меньше пяти.
Для двигателей от 100 кВт и выше условия внешнего заземления приводных механизмов могут потребовать соединения между корпусом двигателя и ведомым механизмом. Типичными применениями являются насосы (заземленные через воду) и редукторы с централизованной смазкой (заземленные через маслопровод). Целями этого соединения являются уравнивание потенциалов и улучшение заземления. Оно должно иметь низкую индуктивность, таким образом, должна применяться цельнометаллическая или плетеная полоса минимальной длины. В некоторых случаях может требоваться дополнительное соединение компонентов двигателя, например между корпусом двигателя и клеммной коробкой (см. рисунок 19).
Там, где для двигателя и ведомой нагрузки используется общая система смазки, должно быть предотвращено соединение через корпуса изолированных подшипников, например такими средствами, как изолированные муфты, шайбы для зажимов и крепежных болтов, а также изолированные секции трубопроводов, сделанные из керамики или маслостойкого твердого поливинилхлорида.
|
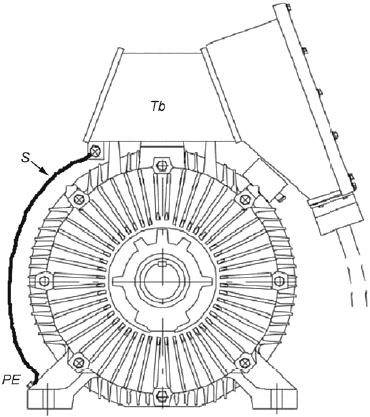
Tb - клеммная коробка; PE - соединение с корпусом двигателя; S - соединительная шина
Рисунок 19 - Соединительная шина от клеммной коробки двигателя к корпусу двигателя
9.1.4 Силовые кабели двигателя для преобразователей частоты с высокой частотой коммутации
9.1.4.1 Рекомендуемые типы кабелей
Для уровней мощности свыше 30 кВт в целях уменьшения высокочастотных токов в подшипниках и ухудшения ЭМС рекомендуются одножильные кабели с симметричным расположением силовых и заземляющих проводников.
Экранированные многожильные кабели предпочтительнее для более низких мощностей и удобства монтажа. Для двигателей мощностью до 30 кВт и сечений кабеля до 10 мм применимы и несимметричные кабели, но при этом усложняется монтаж. В этом диапазоне мощностей распространено экранирование из фольги.
Для выполнения функций защитного проводника проводимость экрана должна составлять не менее 50% проводимости фазного проводника. При высоких частотах проводимость экрана должна составлять по крайней мере 10% проводимости проводника фазы. Этим требованиям соответствуют медные или алюминиевые экраны. Из-за меньшей проводимости стальной экран должен быть большего поперечного сечения, а спираль экрана должна иметь малый угол наклона. Гальванизация увеличивает высокочастотную проводимость. Если сопротивление экрана высоко, то продольное падение напряжения, вызванное высокочастотными обратными токами, может повысить потенциал корпуса двигателя относительно ротора (заземленного), вызывая нежелательные токи в подшипниках (см. раздел 8). Эффективность обеспечения электромагнитной совместимости экраном может быть оценена вычислением его поверхностного передаточного сопротивления, которое должно быть низким даже при высоких частотах.
Кабельные экраны должны быть заземлены на обоих концах. При полном круговом (360°) подсоединении экрана используются все его высокочастотные возможности, что способствует достижению электромагнитной совместимости (см. 9.1.4.3).
Некоторые примеры применяемых экранированных кабелей:
- кабель с концентрическим медным или алюминиевым защитным экраном (см. рисунок 20, A); фазные провода расположены на равном расстоянии друг от друга и от экрана, который также используется как защитный проводник;
- трехжильный кабель с тремя симметричными проводниками для защитного заземления и концентрического экрана/брони (см. рисунок 20, B); экран этого кабеля используется только для обеспечения электромагнитной совместимости и физической защиты.
Примечание - В системах небольшой мощности достаточен единственный проводник для защитного заземления;
- трехжильный кабель с витой броней/экраном - стальной или из оцинкованного железа, с небольшим шагом витка (см. рисунок 20, C); если поперечное сечение экрана недостаточно для использования в качестве защитного проводника, то необходим отдельный заземляющий проводник.
|
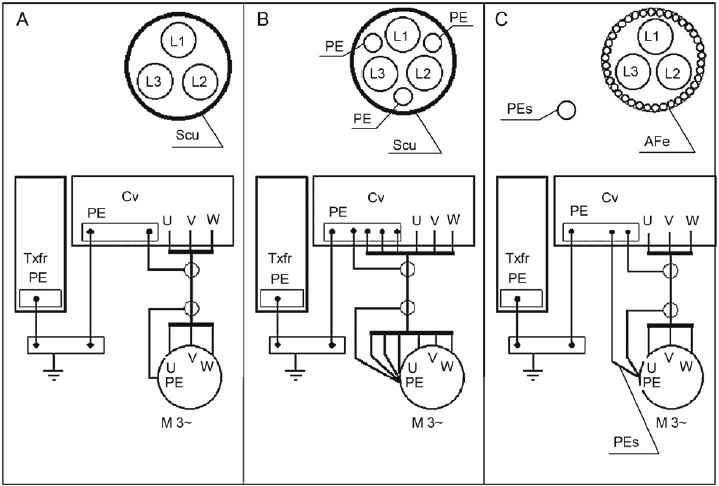
Scu - концентрический медный (или алюминиевый) экран; AFe - стальная броня; Txfr - трансформатор; Cv - преобразователь; PEs - отдельный заземляющий провод
Рисунок 20 - Примеры экранированных кабелей для двигателей и соединенных с ним устройств
Во всех случаях части кабеля, которые должны быть подключены к контактам преобразователя частоты и к коробке выводов двигателя и поэтому очищены от экрана, должны быть предельно короткими.
Как правило, экранированные отрезки кабеля длиной до 100 м могут использоваться без дополнительных мер. Для более длинных кабелей могут требоваться специальные меры, например такие как установка выходных фильтров. При наличии фильтра вышеприведенные рекомендации применимы к кабелю, соединяющему выход преобразователя и фильтр. Если фильтр обеспечивает электромагнитную совместимость, то кабель от фильтра до двигателя не нуждается в экранировании или симметрировании, но для двигателя может потребоваться дополнительное заземление.
Одножильные неэкранированные кабели могут быть применены для двигателей большой мощности, если они установлены близко друг к другу на металлическом кабельном переходе, который подсоединен к системе заземления, по крайней мере на обоих концах кабеля. Магнитные поля от этих кабелей могут индуцировать токи в соседней металлоконструкции, приводя к нагреванию и увеличению потерь.
9.1.4.2 Параллельная симметричная прокладка кабеля
Когда прокладывается кабель от преобразователя к двигателю большой мощности, из-за больших токов могут быть использованы несколько проводящих элементов, включенных параллельно. Соответствующая этому случаю прокладка кабеля для простой (симметричной) установки должна быть сделана согласно рисунку 21.
|
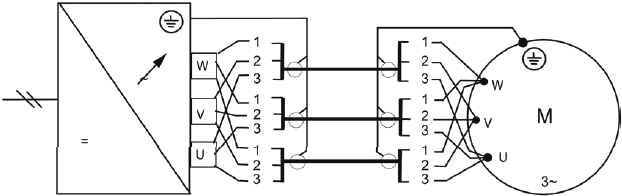
Рисунок 21 - Схема параллельного симметричного кабельного соединения преобразователя и двигателя большой мощности
9.1.4.3 Концевая заделка кабеля
При монтаже кабельного соединения должно быть обеспечено подключение высокочастотного экрана как к преобразователю, так и к двигателю. Распределительная коробка двигателя должна быть сделана из электропроводящего материала (алюминия, железа и т.д.), который электрически соединен с корпусом. Соединения экрана должны быть сделаны с 360-градусной концевой заделкой, обеспечивающей низкое сопротивление в широком частотном диапазоне от постоянного тока до 70 МГц. Это эффективно уменьшает напряжения на валу и корпусе и улучшает характеристики электромагнитной совместимости.
Примеры хорошего выполнения наконечников для преобразователя и двигателя невысокой мощности показаны на рисунках 22 и 23 соответственно.
|
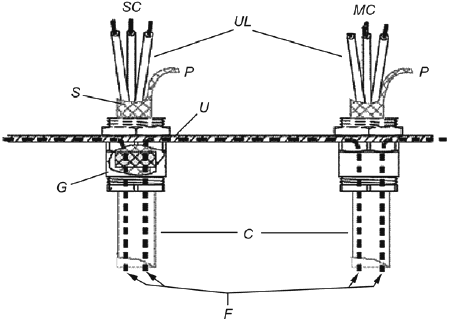
SC - питающий кабель; MC - кабель двигателя; UL - не экранированная часть (по возможности короткая); S - экран кабеля; P - гибкий проводник (по возможности короткий); U - панель сальников; G - ЭМС-сальник кабеля; C - кабели (внешняя оболочка); F - сплошная клетка Фарадея
Рисунок 22 - Соединения преобразователя с 360-градусными высокочастотными кабельными уплотнениями и клеткой Фарадея
|
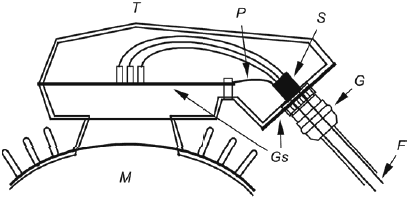
T - соединительная коробка (проводящая); S - экран кабеля; P - гибкий проводник (по возможности короткий); M - корпус двигателя; Gs - проводящие прокладки; G - ЭМС-сальник кабеля; F - сплошная клетка Фарадея
Рисунок 23 - Концевая заделка в двигателе с 360-градусным соединением
Подсоединения экрана к соединительной коробке двигателя должны быть выполнены или с кабельным ЭМС-сальником, как показано на рисунке 24 (a), или с клеммой экрана, как показано на рисунке 24 (b). Подобные соединения требуются и с корпусом преобразователя.
|
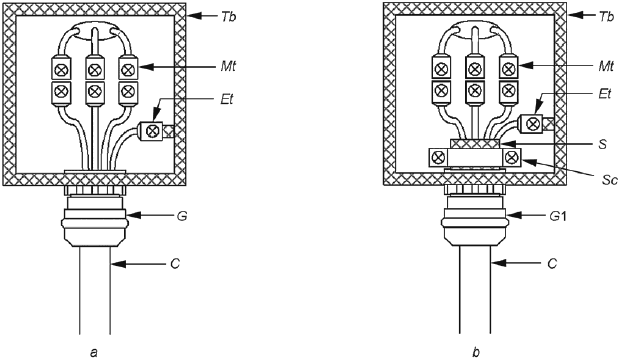
a - подсоединение с сальником; b - подсоединение с клеммой; Tb - соединительная коробка двигателя; Mt - клеммы двигателя; Et - заземляющая клемма; S - экран кабеля; Sc - клемма экрана; G - ЭМС-кабельный сальник; G1 - кабельный сальник без ЭМС; C - кабель
Рисунок 24 - Подключение кабельного экрана
9.1.4.4 Подсоединение кабеля и заземление вспомогательных устройств
Вспомогательные устройства, такие как тахометры, должны быть электрически изолированы от двигателя, чтобы предотвратить образование через них утечки тока, приводящей к неверным показаниям или повреждениям. Возможным решением является электрически изолированное присоединение энкодера. Для тахометра с полым ротором изоляция может быть осуществлена посредством шарового соединения или специального рычага.
Экран кабеля тахометра должен быть изолирован от его корпуса. Другой конец экрана заземлен у преобразователя.
Тахометры с полым валом и электрической изоляцией между полым валом и корпусом тахометра позволяют присоединить экран кабеля к корпусу тахометра.
Использование кабеля с двойным экраном предпочтительно для импульсного энкодера. Чтобы минимизировать проблемы высокочастотных помех, экран должен быть заземлен на стороне энкодера через конденсатор.
Кабель с одним экраном может использоваться с аналоговым тахометром.
Чтобы предотвратить нежелательную связь, кабельная трасса вспомогательных устройств должна быть отделена от трассы прокладки силовых кабелей.
9.1.4.5 Прокладка кабелей для встроенных датчиков
В общем случае рекомендации для аналоговых тахометров, приведенные в 9.1.4.4, применимы и к встроенным датчикам, например термопарам. Однако поскольку прокладка проводов к встроенным датчикам обычно ведется в непосредственной близости от силовой проводки двигателя, его изоляция должна быть достаточной для более высоких напряжений, с которыми эти провода пересекаются. В этих случаях использование экранированного кабеля не всегда возможно.
9.2 Реакторы и фильтры
9.2.1 Общие положения
В некоторых установках для уменьшения крутизны импульсов напряжения инвертора или улучшения характеристик электромагнитной совместимости может быть полезным использование реакторов или выходных фильтров. Однако падение напряжения на этих компонентах может повлиять на режим работы двигателя.
9.2.2 Выходные реакторы
Это специально разработанные реакторы, способные изменять форму широтно-модулированных импульсов инвертора и применяемых для уменьшения крутизны фронта импульсов и пикового напряжения на обмотках двигателя. Однако при неправильном выборе реакторы могут увеличить амплитуду пиков напряжения. Особую аккуратность следует применять при использовании реакторов с ферритовыми сердечниками. В случае, показанном на рисунке 25 (a), присоединение реактора увеличивает время нарастания импульса приблизительно до 5 мкс и уменьшает пиковое напряжение до 792 В. Обычно выходные реакторы располагаются в конструкции шкафа преобразователя. Они могут использоваться также для компенсации емкостных токов в крупных электроприводах при длине кабеля между двигателем и преобразователем длиной несколько сотен метров.
9.2.3 Фильтр ограничения производной напряжения (du/dt-фильтр)
В этом варианте для ограничения темпа нарастания напряжения (du/dt) используется конструкция, состоящая из конденсаторов, катушек индуктивности и диодов или резисторов. Такой фильтр способен радикально уменьшить пиковое напряжение и увеличить время нарастания. В примере, показанном на рисунке 25 (b), пиковое напряжение уменьшено до 684 В с du/dt=40 В/мкс. Применение фильтров сопровождается увеличением потерь от 0,5 до 1,0% и возможным снижением предельных значений момента на валу.
9.2.4 Синусный фильтр
Специальные низкочастотные фильтры позволяет удалять высокочастотные составляющие токов и обеспечивать синусоидальную форму напряжения питания двигателя. На рисунке 25 (c) показаны 1,5 периода выходного межфазного (линейного) напряжения преобразователя с таким фильтром.
Существуют следующие два основных типа синусоидальных фильтров:
1) с фильтрацией как между каждой фазой и землей, так и между фазами;
2) только с межфазной фильтрацией.
Недостатки этих фильтров - высокая стоимость и ряд ограничений по применению (при наличии синусного фильтра):
- напряжение на двигателе не может превысить 90% напряжения питающей сети (снижаются номинальные характеристики преобразователя);
- синусные фильтры не применимы для электроприводов с высокими требованиями к динамическим характеристикам.
9.2.5 Терминальный модуль двигателя
Терминальный модуль присоединяется к выводам двигателя. Его задача - согласование сопротивления двигателя и кабеля, чтобы предотвратить скачок напряжения на двигателе. В примере, показанном на рисунке 25 (d), пиковое напряжение составляет только 800 В с временем нарастания порядка 2 мкс. Как правило, наличие этих фильтров увеличивает потери от 0,5 до 1,0%.
|
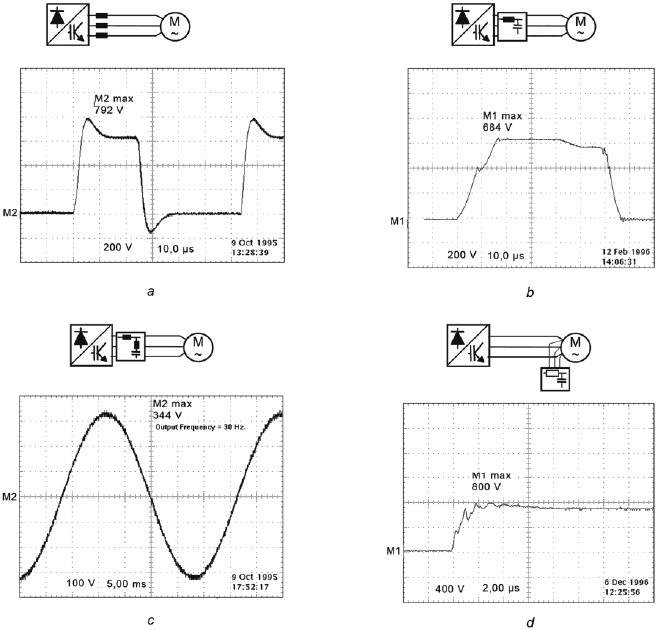
a - выходной реактор (3%); b - выходной фильтр du/dt; c - синусный фильтр; d - устройство подсоединения двигателя
Рисунок 25 - Варианты профилактических мер
9.3 Коррекция коэффициента мощности
Коррекция коэффициента мощности не может быть предпринята без гармонического анализа.
Использование силовых конденсаторов для снижения коэффициента мощности на выходе электронного преобразователя, питающего асинхронный двигатель, не рекомендуется; соответствующие конденсаторы не рассчитаны на высокие частоты, и возможен сбой управления.
Коррекция коэффициента мощности на входе преобразователя напряжения может быть обеспечена путем использования в его составе активного выпрямителя.
9.4 Мехатронные модули (двигатели, конструктивно объединенные с преобразователем)
Когда преобразователь смонтирован внутри корпуса двигателя (в клеммной коробке или в отдельном отсеке), он является неотъемлемой частью общей конструкции двигателя, в которой преобразователь и двигатель используют общую систему охлаждения. Такое устройство называется мехатронным модулем.
Преимущества этой конструкции для пользователя:
- простота монтажа и ввода в эксплуатацию благодаря отсутствию специальных кабелей, дополнительных соединений или заземления;
- соответствие требованиям электромагнитной совместимости (клетка Фарадея), снижение рисков протекания токов в подшипниках;
- отсутствие длинных кабелей или электропроводов между преобразователем и двигателем, т.е. низкий уровень пиков напряжения и нагрузки на изоляцию;
- благодаря компактности экономится пространство и время монтажа;
- наличие единственного поставщика определяет единую ответственность.
Недостатки такой конструкции:
- степень агрессивности окружающей среды может быть очень высокой для электроники преобразователя, отсюда высокая степень требований к корпусу и ударной и термической стойкости монтажных плат и компонентов преобразователя;
- разный срок службы основных составляющих интегрированной конструкции (15-20 лет для двигателей, 5-10 лет для преобразователей).
10 Специфика синхронных двигателей с постоянными магнитами при питании от преобразователей с инверторами напряжения
10.1 Характеристики системы
Применение синхронного двигателя с постоянными магнитами в электроприводах с преобразователями на базе инверторов напряжения по сравнению с асинхронными двигателями имеет ряд преимуществ:
- меньшее номинальное значение мощности преобразователя, поскольку коэффициент мощности синхронного двигателя может приближаться к единице;
- больший КПД системы;
- меньший размер двигателя по сравнению с асинхронным двигателем того же номинала;
- минимальные потери в роторе и, следовательно, меньшее влияние ротора на нагрев двигателя;
- упрощенные способы охлаждения двигателя благодаря минимальным потерям в роторе.
С другой стороны, поскольку поле постоянных магнитов может быть уменьшено только под действием тока статора, при работе двигателя в области ослабленного потока может возникнуть необходимость в снижении номинального значения выходной мощности.
10.2 Потери и их влияние
Информация, приведенная в разделе 5, остается в силе.
Поскольку такие двигатели обычно не имеют демпферной обмотки, гармонические токи обуславливают образование вихревых токов в постоянных магнитах и/или массивных частях ротора. Нагревание магнитов из-за увеличенных потерь статора и вихревых токов в магнитах может вызвать размагничивание.
10.3 Шум, вибрация и крутильные колебания
Раздел 6 остается в силе.
10.4 Электрическое воздействие на изоляцию двигателя
Раздел 7 остается в силе.
При работе двигателя в генераторном режиме следует убедиться, что противо-ЭДС не превышает допустимое для установки значение. Это может быть частью детального анализа обстоятельств возникновения неисправностей оборудования, например потери управления при глубоком регулировании поля или коротких замыканиях обмоток.
10.5 Токи в подшипниках
Раздел 8 остается в силе.
Примечание - дополнительный подшипник может быть установлен в датчике обратной связи.
10.6 Специфика постоянных магнитов
Размагничивание постоянных магнитов в процессе работы двигателя может быть вызвано чрезвычайно высоким значением размагничивающих пиков тока. Риск размагничивания также обусловлен дополнительным нагреванием магнитов, которое может повлиять при более низких значениях тока.
11 Специфика асинхронных двигателей с короткозамкнутым ротором при питании от высоковольтных преобразователей с инверторами напряжения
11.1 Общие положения
Информация о низковольтных двигателях, питаемых от преобразователей - источников напряжения, действительна и для двигателей и преобразователей среднего и высокого напряжения. Однако имеются некоторые различия.
11.2 Характеристики системы
Инверторы среднего напряжения являются трех- или многоуровневыми инверторами. Следовательно, они имеют более одного полупроводникового силового ключа в каждой из ветвей моста инвертора, соединенных последовательно (см. рисунок 26).
Для трехуровневого инвертора, например, междуфазное напряжение может принимать пять различных значений (-Ud, -1/2 Ud, 0, 1/2 Ud, Ud) вместо трех значений (-Ud, 0, Ud), возможных для двухуровневого инвертора. С одной стороны, это позволяет получить лучшую форму кривой выходного напряжения, уменьшая гармонические токи (приблизительно на 50% при каждом увеличении уровня на рисунке 27). С другой стороны, частота пульсаций инвертора среднего напряжения ниже той, что в низковольтных инверторах, частота напряжений гармоник понижается и стремится увеличить токи гармоник.
|
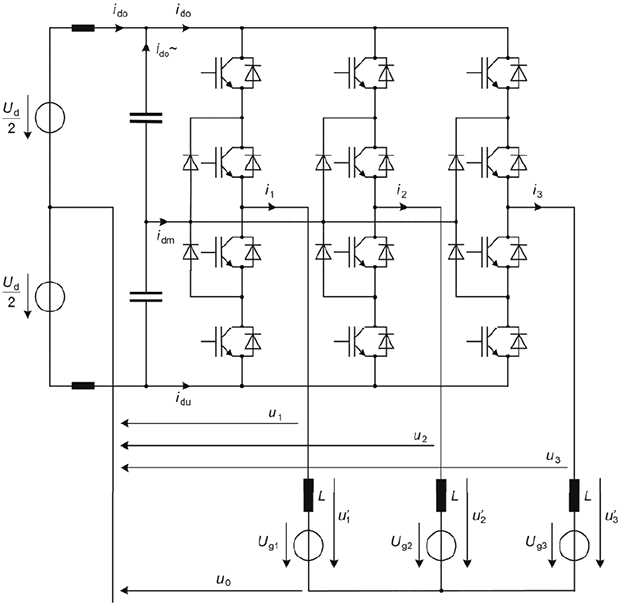
Рисунок 26 - Схема типичного трехуровневого инвертора напряжения
|
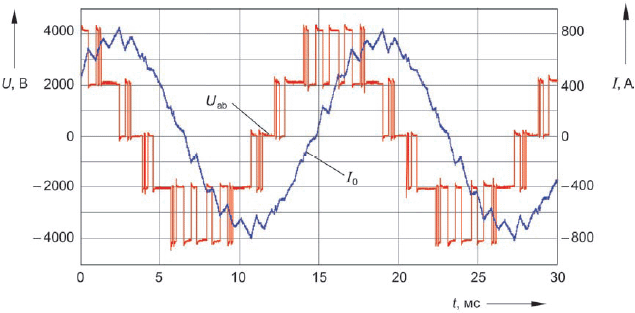
Рисунок 27 - Графики выходного напряжения и тока типичного трехуровневого инвертора напряжения
11.3 Потери и их воздействие
11.3.1 Дополнительные потери в обмотке статора
Каждый тип преобразователя создает определенный спектр гармонических токов или гармонических напряжений, обусловливающих гармонические токи в электрической машине. Дополнительные потери в статорной обмотке вследствие этих гармонических токов существенно зависят от глубины укладки витков статорной обмотки и их распределения по площади поперечного сечения пазов. Сопротивление обмотки по переменному току значительно возрастает с частотой тока и высотой витков. Там, где уровень гармонических токов низок, для машин, питаемых от преобразователей - источников напряжения, обычно нет необходимости в специальной конструкции витков или в смещении витков обмотки статора.
Как отмечено в 11.2, трехуровневые или многоуровневые преобразователи имеют лучшую (более близкую к синусоидальной) форму кривой выходного напряжения, уменьшая токи высших гармоник. Высоковольтные преобразователи обычно имеют более низкую частоту коммутаций, которая уменьшает дополнительные потери в железе, но ведет к увеличению гармонических токов. Из-за большого числа факторов, влияющих на дополнительные потери в двигателе, обобщение затруднительно.
11.3.2 Измерение дополнительных потерь
Для электроприводов с номинальными мощностями в диапазоне мегаватт испытание комплектной системы силового электропривода на стенде изготовителя часто является неэкономичным, так как требует значительного времени и других издержек. Тем не менее дополнительные потери должны быть учтены при расчете результирующего КПД системы электропривода и при тепловом расчете электрической машины.
В обычной практике для правильной разработки систем электропривода достаточно опираться на расчетные значения, при вычислении которых необходимо учитывать главные влияющие факторы, такие как вытеснение тока в статорной и роторной обмотках.
В соответствии с соглашением между изготовителем и потребителем испытания могут выполняться согласно IEC 60034-2.
11.4 Шум, вибрация и крутильные колебания
Как разъяснено в 11.3.2, для систем электропривода с номинальными мощностями в диапазоне мегаватта неэкономично выполнять измерения на испытательном участке с машиной, питаемой от преобразователя. При необходимости измерение шума и вибрации комплектных систем электропривода должно быть выполнено во время ввода в эксплуатацию на месте. Однако при этом может быть существенным влияние приводимого в движение оборудования.
Для электрических машин с номинальными мощностями в диапазоне мегаватт и максимальными рабочими частотами вращения более 2500 об/мин зачастую невозможно выполнить динамический расчет ротора с первой паразитной критической скоростью, превышающей максимальную рабочую скорость. Поэтому, особенно в диапазоне регулирования скорости шириной более 50% номинальной скорости, невозможно поддерживать этот диапазон свободным от паразитных критических скоростей.
Когда при выходе на рабочий режим или остановке электропривода существуют промежуточные критические скорости и могут возникать недопустимые колебания вала двигателя, рекомендуется пропускать соответствующие резонансные частоты из рабочего диапазона преобразователя ("частотное окно"). В случаях, когда это обоснованно, следует устанавливать "частотные окна" на стадии проектирования. Их ширина - несколько сотен об/мин из-за ограниченной точности вычисления промежуточных критических скоростей и демпфирования всего валопровода. Ширина "частотного окна" может быть значительно меньшей, если ее определять во время ввода в эксплуатацию на основании знания реальных критических скоростей; эта процедура должна быть предпочтительной.
11.5 Электрические нагрузки на изоляцию двигателя
11.5.1 Общие положения
Критическим параметром, который определяет электрическую нагрузку в начале включения, является максимальный темп изменения напряжения (du/dt) на обмотке. В низковольтных системах прикладываемое к обмотке статора напряжение обычно составляет от 400 до 690 В, и du/dt может быть полностью определено временем нарастания импульса. Для высоковольтных систем существует больший диапазон используемых напряжений, поэтому необходимо рассматривать фактическое значение du/dt.
Примечание - Типичные значения du/dt составляют от 3 до 4 кВ/мкс.
|
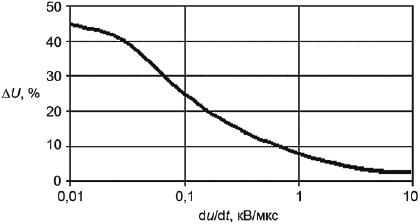
Рисунок 28 - Типичная величина скачков напряжения ![]() (в процентах от фазного напряжения) как функция du/dt
(в процентах от фазного напряжения) как функция du/dt
11.5.2 Перенапряжение на клеммах двигателя
В дополнение к факторам, упомянутым в 7.1 и 7.3, перенапряжение, появляющееся на клеммах двигателя, питаемого от высоковольтного преобразователя, зависит также от числа ступеней преобразователя. Значение уровней импульсов напряжения должны быть определены системным интегратором в соответствии с IEC/TS61800-8. Результаты должны быть согласованы с производителем электрической машины, чтобы правильно выбрать систему изоляции.
11.5.3 Перенапряжение на обмотках статора при применении преобразователя
11.5.3.1 Общие положения
Питаемые от преобразователя катушки обмотки статора, предназначенные для синусоидальных номинальных напряжений 2,3 кВ и выше, подвергаются воздействиям скачков напряжения с малым временем нарастания, существенными амплитудами и высокими частотами. При этом они могут испытывать перенапряжения в различных частях конструкции. Эти части указаны позициями 1, 2 и 3 на рисунке 29.
Воздействия этих перенапряжений на обмотку статора и на систему изоляции обмотки рассмотрено в 11.5.3.2 и 11.5.3.5. Важно, чтобы проектировщик двигателя знал об особенностях формы напряжения на выходе преобразователя и на клеммах двигателя, чтобы обоснованно учесть все его особенности во время проектирования обмотки статора.
|
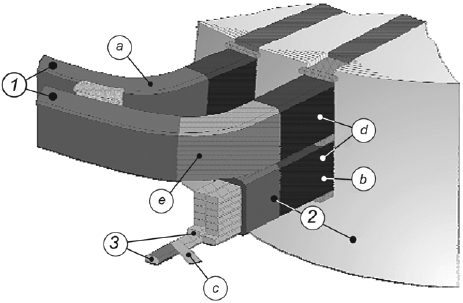
1 - межфазная изоляция; 2 - изоляция фазы относительно земли; 3 - межвитковая изоляция; a - фазная изоляция/изоляция конца обмотки; b - изоляция на землю; c - витковая изоляция; d - слой, сдерживающий пазовое перенапряжение; e - слой, контролирующий перенапряжение на конце обмотки (выравнивание перенапряжений)
Рисунок 29 - Средства изоляции и выравнивания напряжений в обмотках среднего и высокого напряжений
11.5.3.2 Перенапряжение между смежными проводниками выводов катушек
Если есть воздушные зазоры рядом с витками изоляции или между ними, то могут иметь место повреждения от частичного разряда в случае, если используется не отвечающая требованиям межвитковая изоляция. Такие повреждения происходят из-за продолжительного воздействия высоковольтных скачков со временем нарастания пиков напряжений от 50 нс до 2 мкс. Скачки напряжения с малым временем нарастания приводят к неоднородному распределению напряжения на сетевых концах катушек и значительному повышению межвитковых перенапряжений.
Большинство изготовителей двигателей, учитывая это явление, используют подходящую секционную или межвитковую изоляцию, хорошую пропитку под давлением или в вакууме (VPI), или изолируют катушки горячей густой смолой под давлением при изготовлении статорных обмоток на номинал 2,3 кВ и выше. Эти меры эффективны для уменьшения вероятности отказов под воздействием физических явлений, вызванных продолжительными высокочастотными скачками и воздушными пустотами вокруг проводников обмотки.
11.5.3.3 Перенапряжение между проводниками и землей
Перенапряжения между проводниками и землей определяются конфигурацией заземления электропривода. Необходимы меры для исключения чрезмерного диэлектрического нагрева изоляции высокочастотными емкостными токами, который может вызвать превышение температуры статорной обмотки и ускорить процесс температурного старения.
Этот же дополнительный нагрев может ухудшить свойства полупроводящего слоя, защищающего от перенапряжения. Иногда процесс разрушения этого слоя, облегчаемый перенапряжением, ускоряется генерацией озона при активном частичном разряде.
11.5.3.4 Перенапряжения между смежными выводами обмоток различных фаз
Межфазный частичный разряд может происходить, если градиент напряжения между элементами обмоток разных фаз превышает 3 кВ/мм. Эта ситуация весьма вероятна в питаемых от преобразователя двигателях из-за высоких повторяющихся значений переходного напряжения, которое возникает в каждой фазе. Для двигателей, питаемых от преобразователей, требуется соответствующее расположение концов обмоток либо уменьшение напряжения между поверхностями катушек различных фаз.
11.5.3.5 Концевые слои полупроводникового материала, выравнивающие перенапряжения
Высоковольтные двигатели с рамочными катушками могут иметь слой материала, обычно имеющий нелинейное удельное сопротивление, который частично покрывает на каждом конце катушки слой, сдерживающий пазовые перенапряжения (см. рисунок 29). Слой этого полупроводникового, выравнивающего потенциал материала уменьшает высоковольтные перенапряжения на поверхности раздела между слоем, сдерживающим пазовые перенапряжения, и лобовыми частями обмоток. Опыт эксплуатации показал, что стандартные изолирующие материалы довольно быстро теряют способность противостоять импульсам перенапряжения под воздействием высоких частот, вызывающих существенный нагрев как проводящих, так и выравнивающих материалов. Данный эффект обостряется тем, что высокие частоты снижают способность кремний-углеродных материалов выравнивать напряжение вдоль поверхности витков, которые имеют склонность концентрировать нагрев в короткой зоне у конца обмоток. Для решения этой проблемы производителям и испытателям следует обратить внимание на классификацию и квалификационные испытания изолирующей системы в соответствии с IEC 60034-18-42.
11.6 Токи через подшипники
Действуют положения раздела 8.
12 Специфика синхронных двигателей при питании от преобразователей с инверторами напряжения
12.1 Характеристики системы
Система электропривода, состоящая из преобразователя - источника напряжения и синхронного двигателя вместо асинхронного, имеет следующие преимущества:
- пониженная полная мощность преобразователя, так как коэффициент мощности синхронного двигателя практически равен единице;
- больший КПД двигателя и преобразователя;
- более высокий вращающий момент в зоне ослабления поля.
Все положения 11.2 остаются в силе.
12.2 Потери и их воздействие
Раздел 11.3 остается в силе.
Следует дополнительно упомянуть, что потери в демпферной клетке различаются по стержням.
12.3 Шум, вибрация и крутильные колебания
Раздел 11.4 остается в силе.
12.4 Электрические перенапряжения в изоляции двигателя
Раздел 11.5 остается в силе.
12.5 Токи через подшипники
Раздел 11.6 остается в силе.
13 Специфика асинхронных двигателей с короткозамкнутым ротором при питании от преобразователей с инверторами тока
13.1 Характеристики системы
Особенности преобразователя следующие (см. рисунок 30):
- управляемый, ведомый сетью выпрямитель, подключенный к питающей сети;
- большой реактор в звене постоянного тока для сглаживания тока;
- управляемый автономный инвертор тока, подключенный к двигателю.
Токи двигателя трапециевидной формы (трапеция 120°) содержат гармоники с номерами =-5; +7; -11; +13. Знаки "плюс/минус" указывают, вращается ли магнитное поле, возбужденное токами этих гармоник, в том же направлении, что и поле основного тока. Амплитуды гармоник пропорциональны 1/
. Фазное напряжение двигателя содержит короткие импульсы на всех интервалах коммутации тока.
|
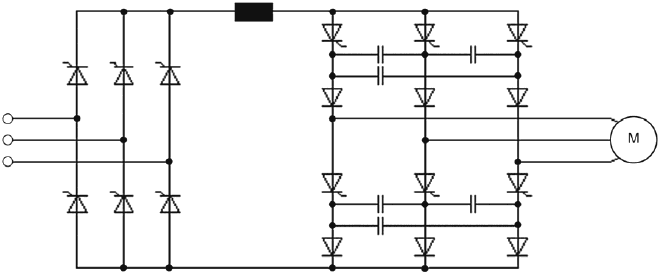
Рисунок 30 - Схема преобразователя с инвертором тока
|
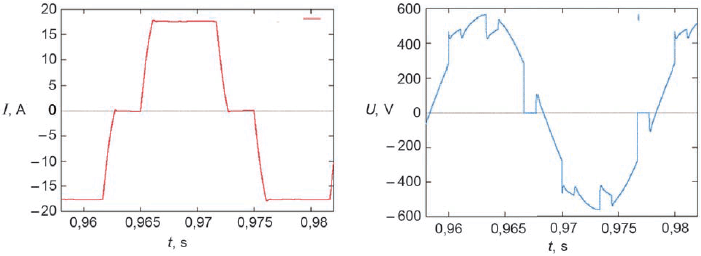
Рисунок 31 - Формы тока и напряжения в преобразователе с инвертором тока
Обмотка статора является частью коммутационной цепи. Поэтому двигатель должен быть спроектирован с индуктивностями, имеющими малое рассеяние. Изготовитель преобразователя должен обеспечить надлежащий выбор коммутирующих конденсаторов.
13.2 Потери и их воздействие
Даже если фазное напряжение является почти синусоидальным, резкие скачки токов во время коммутации, вызванные быстрыми изменениями потока рассеяния паза, вызывают дополнительные потери в стали (так называемые коммутационные потери), особенно в зубцах статора.
Другой значимой составляющей дополнительных потерь, вызванных гармониками, являются вихревые потери в корпусе, вызванные токами высших гармоник с частотой, близкой к ![]() (
(-1). Поэтому дополнительные потери в двигателе, питаемом от преобразователя с инвертором тока, при полной нагрузке обычно выше, чем дополнительные потери такого же двигателя, питаемого от инвертора напряжения с ШИМ. Колонки на рисунке 32 в качестве примера показывают распределение потерь в конкретной электрической машине (типоразмер 315М, исполнение N), питаемой от разных преобразователей с различным сочетанием гармоник и синусоидального источника. Данный пример иллюстрирует значимость различия потерь в наиболее распространенных в настоящее время преобразователях. Это сравнение не может распространяться на иные типы двигателей и преобразователей (с различным принципом модуляции и несущими частотами). Чтобы облегчить сравнение на рисунке 32, основные гармоники напряжений и токов в режиме питания от преобразователей приняты такими же, как при номинальном режиме.
В соответствии с рисунком 32 при питании от преобразователя с инвертором тока гармонические потери выше, чем при питании от инвертора напряжения. Разница уменьшается при неполной нагрузке, поскольку гармонические потери постоянны при питании от инверторов напряжения и увеличиваются при снижении нагрузки при инверторах тока.
|
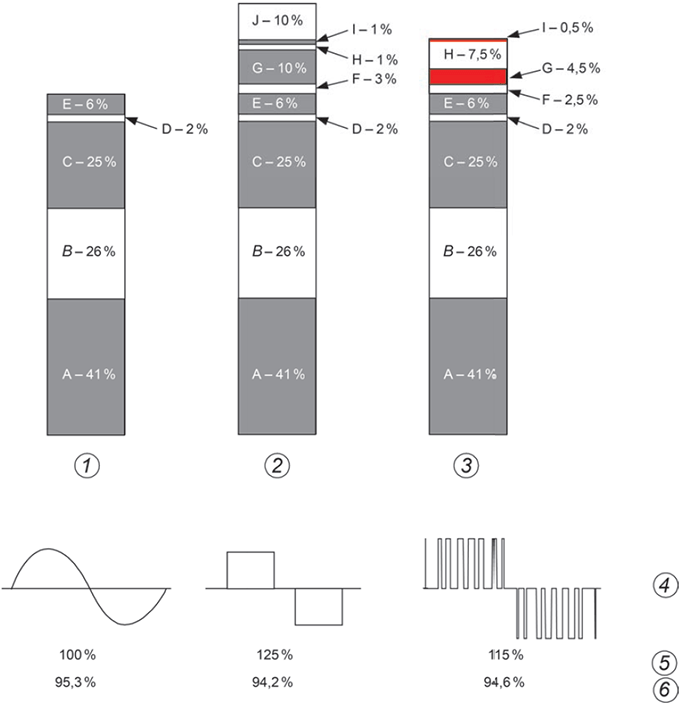
Потери, вызываемые рабочей частотой | Потери, вызываемые гармониками |
E - потери на трение | J - потери на коммутацию |
D - дополнительные потери под нагрузкой | I - дополнительные потери под нагрузкой |
C - потери в стали | H - потери в стали |
B - потери в обмотках ротора | G - потери в обмотках ротора |
A - потери в обмотках статора | F - потери в обмотках статора |
1 - синусоидальное напряжение; 2 - инвертор тока; 3 - инвертор напряжения с ШИМ; 4 - диаграммы напряжения; 5 - потери; 6 - КПД
Рисунок 32 - Влияние инвертора на потери в асинхронном короткозамкнутом двигателе (315 мм исполнения N) при номинальном токе и скорости
Утверждение, приведенное в 11.3.1, о влиянии высоты витков обмотки статора на дополнительные потери в ней из-за токов гармоник имеет особое значение для машин, питаемых от преобразователей с инверторами тока. Что касается витков машин с номинальными мощностями в диапазоне мегаватта, разработанных для синусоидального питающего напряжения, высота витка в несколько миллиметров весьма обычна. Чтобы уменьшить дополнительные потери, рекомендуется проектировать машины, питаемые от преобразователей с инверторами тока, с меньшими витками и ограничить число параллельно соединенных витков, размещенных один над другим в пазу, тремя. Как вариант, может потребоваться перемещение витков или в пределах одной катушки, или между смежными катушками.
Раздел 11.3.2 действителен и для этих машин.
13.3 Шум, вибрация и крутильные колебания
Дополнительные частоты магнитных шумов вызваны взаимодействием основных гармоник (число пар полюсов ![]() ) и основной частоты. Колебания сил, которые определяют появление шумов от магнитных потоков, имеют моды
) и основной частоты. Колебания сил, которые определяют появление шумов от магнитных потоков, имеют моды =0 или
=2
![]() и частоты
и частоты ![]() (
(=1, 2, 3…) соответственно. Гармоники с номера
>13 имеют малую амплитуду, и ими можно пренебречь. Поэтому частоты дополнительных тонов составляют менее 1 кГц, что далеко от частот резонанса статора, которые намного выше. Увеличение шума при питании от преобразователя по сравнению с работой того же двигателя от синусоидального источника питания (при тех же величинах
![]() ,
, ![]() и нагрузке) является относительно малым (в диапазоне от 1 до 5 дБ).
и нагрузке) является относительно малым (в диапазоне от 1 до 5 дБ).
Наиболее существенным негативным воздействием преобразователей с инверторами тока на работу асинхронных короткозамкнутых двигателей является создание пульсирующих вращающих моментов с относительно высокими амплитудами. В шестипульсной схеме практически важными являются колебательные составляющие момента с частотами шести- и 12-кратными основной (![]() ), их амплитуда составляет порядка 15% (гармоника частоты 6
), их амплитуда составляет порядка 15% (гармоника частоты 6![]() ) и 5% (гармоника частоты 12
) и 5% (гармоника частоты 12![]() ) номинального момента. Кроме того, колебательная составляющая момента возрастает от пульсаций тока в промежуточном звене постоянного тока; эти составляющие момента имеют частоты 6(
) номинального момента. Кроме того, колебательная составляющая момента возрастает от пульсаций тока в промежуточном звене постоянного тока; эти составляющие момента имеют частоты 6(![]() ) и 12(
) и 12(![]() ), где
), где ![]() - основная частота питания. Пульсации тока в промежуточном звене
- основная частота питания. Пульсации тока в промежуточном звене ![]() составляют обычно около 10%, поэтому амплитуда колебаний момента составляет несколько процентов от его номинального значения.
составляют обычно около 10%, поэтому амплитуда колебаний момента составляет несколько процентов от его номинального значения.
Из-за этих пульсирующих вращающих моментов рекомендуется проводить тщательный анализ механики всего вращающегося агрегата. Если одна из критических скоростей вращения совпадает с частотой пульсирующего вращающего момента в пределах установленного диапазона скоростей, то непрерывная работа на этой скорости недопустима, так как может вызвать резонанс. Особенно опасен вариант использования сочленения с малым коэффициентом демпфирования (упругие сочленения). В таких случаях желательно формирование частотного окна.
13.4 Электрические перенапряжения в изоляции двигателя
Как установлено в 13.1, фазное напряжение двигателя содержит короткие импульсы, вызванные коммутациями тока. Эти короткие импульсы создают перенапряжения в изоляции обмоток. Однако поскольку в инверторах обычно используются тиристоры, величины пиков и время их нарастания являются не столь критичными, и нет необходимости в усовершенствовании системы изоляции.
13.5 Токи через подшипники
Испытаниями и опытом эксплуатации доказано, что питание двигателя от преобразователя с инвертором тока оказывает небольшое влияние на напряжение на валу, и нет необходимости в специальных мерах по защите подшипников.
13.6 Специфика шестифазных короткозамкнутых асинхронных двигателей
Термин "шестифазная обмотка" часто заменяется словосочетанием "две идентичные трехфазные обмотки, смещенные относительно друг друга на пространственный угол 30°/p". Две обмотки питаются двумя идентичными преобразователями с инверторами тока, как описано в 13.1, но имеют фазовый сдвиг токов на основных выходах, равный 30°.
Преимущество данного решения в том, что поля в области воздушного зазора, которые возбуждены гармоническими токами с номерами обмоток =-5 и
=7, исключают друг друга. Как следствие, не существует никаких потерь в роторе, порожденных этими гармониками, и никаких пульсирующих вращающих моментов, шестикратных основной частоте. Частоты пульсирующих вращающих моментов определяются выражением 12
![]() (
(![]() =1; 2...).
=1; 2...).
Уравнение частот пульсирующих вращающих моментов, основанных на пульсациях постоянного тока, остается неизменным (см. 13.3).
Все утверждения 13.1 и 13.5 относительно других свойств преобразователей со свойствами источника тока остаются в силе.
14 Специфика синхронных двигателей при питании от инверторов тока
14.1 Особенности системы
Синхронные двигатели со статическим или бесщеточным возбуждением могут также питаться от преобразователей с инверторами тока, коммутируемых нагрузкой. Для двигателя этот тип питания - то же самое, что и двухзвенный преобразователь частоты - источник тока (см. рисунок 33). Для уменьшения пульсирующих вращающих моментов, вызванных гармоническими полями, необходима демпфирующая обмотка. Если используется конструкция с явно выраженными полюсами, то индуцированные вихревые токи обладают тем же самым действием, что и демпфирующая обмотка.
Звено преобразователя, подключенное к сети, является ведомым сетью.
|
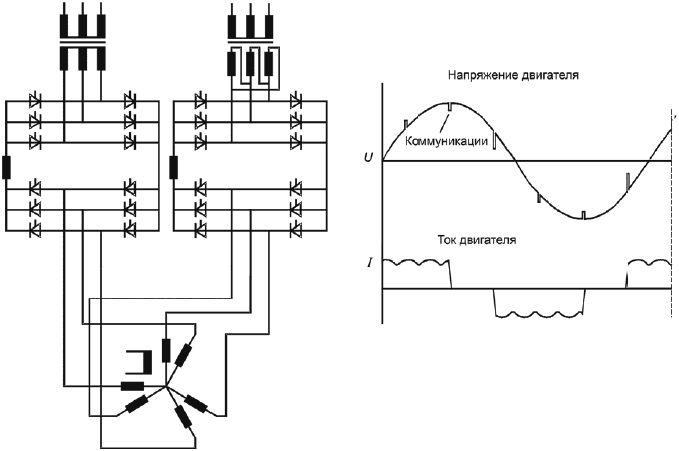
Рисунок 33 - Схема и формы напряжения и тока для синхронного двигателя, питаемого от преобразователя - источника тока
Инвертор, подключенный к двигателю, коммутируется нагрузкой. Синхронная машина работает с перевозбуждением для добавки реактивной мощности, которая необходима для коммутации инвертора. В этом случае реактивная мощность подводится не от преобразователя, как в случае асинхронного двигателя, где активная и реактивная мощности подводятся от преобразователя. Поэтому преобразователь синхронного двигателя может иметь меньшие размеры и стоимость. Кроме того, коммутация столь же проста, как и у инвертора на стороне питающей сети.
Другая отличительная особенность - возможность синхронной машины производить реактивную мощность только при вращении. Поэтому пуск невозможен без дополнительных мер, таких как генерация импульсов в звене постоянного тока. В результате реактивная мощность, которая необходима для осуществления коммутации, должна подводиться при очень низкой скорости, включая остановку.
Устройства с шестью фазами, показанные на рисунке 32, могут быть рассмотрены как два шестипульсных преобразователя - источника тока, каждый питает одну из двух трехфазных обмоток двигателя. В качестве альтернативы может быть установлено 12-пульсное устройство с использованием трехобмоточного трансформатора между двумя шестипульсными преобразователями и трехфазным двигателем.
Это устройство устраняет в трансформаторе частоты -5![]() , +7
, +7![]() , -17
, -17![]() , +19
, +19![]() ..., уменьшая дополнительные потери в обмотке статора. Кроме того, появляется возможность синхронизировать двигатель непосредственно с сетью, если не требуется регулирование скорости в различных режимах работы.
..., уменьшая дополнительные потери в обмотке статора. Кроме того, появляется возможность синхронизировать двигатель непосредственно с сетью, если не требуется регулирование скорости в различных режимах работы.
Двигатели с восемью или более полюсами - это обычно машины с явно выраженными полюсами, с шихтованными полюсами или полюсными башмаками. Демпфирующая клетка встроена в полюсный башмак. Для двигателей с четырьмя или шестью полюсами обычным является шихтованный цилиндрический ротор или ротор с шихтованными или явно выраженными полюсами.
У двигателей с двумя полюсами всегда есть цилиндрический ротор с шихтованной или со сплошной активной частью. Цилиндрические роторы снабжены демпфирующей клеткой. В сплошных роторах с явно выраженными полюсами демпфирующие токи протекают по твердой поверхности полюсного башмака.
Преимущество медной демпфирующей клетки цилиндрических роторов - меньшие дополнительные потери в клетке и несколько меньшие пульсирующие вращающие моменты, чем в двигателях со сплошными явно выраженными полюсами. Однако суждение о полном КПД обеих конструкций невозможно, так как для двигателей с явно выраженными полюсами характерны более высокие потери сопротивления воздуха, чем для двигателей с цилиндрическим ротором.
14.2 Потери и их воздействия
Утверждения 13.2 и 13.6 остаются в силе.
Дополнительные потери из-за гармонических токов требуют надлежащей конструкции демпфирующей обмотки, особенно в случае трехфазного двигателя, питаемого шестипульсным преобразователем. Эти дополнительные потери могут отрицательно влиять на температуру обмотки возбуждения.
Как отмечено в 14.1, применение 12-пульсного преобразователя приводит к сокращению дополнительных потерь в обмотке статора.
14.3 Шум, вибрация и крутильные колебания
Разделы 13.3 и 13.6 остаются в силе.
14.4 Электрические перенапряжения в изоляции двигателя
Раздел 13.4 остается в силе.
14.5 Токи через подшипники
Действуют положения раздела 13.5.
15 Специфика работы асинхронных двигателей при питании от преобразователей с ШИМ-инверторами тока
15.1 Характеристики системы (см. рисунок 34)
Существенное снижение напряжений и токов гармоник, вызванных преобразователем с инвертором тока, может быть достигнуто широтно-импульсной модуляцией выходного тока инвертора в сочетании с применением фильтрующих конденсаторов на выходе преобразователя. В такой системе формы тока и напряжения двигателя близки к синусоидальным (см. рисунок 35). Однако остающиеся гармоники требуется учитывать.
|
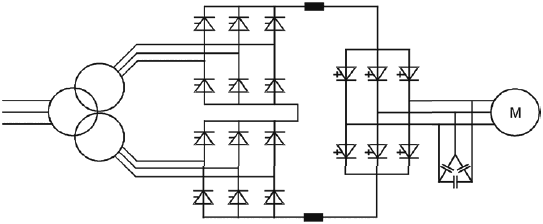
Рисунок 34 - Схема преобразователя с ШИМ-инвертором тока
|
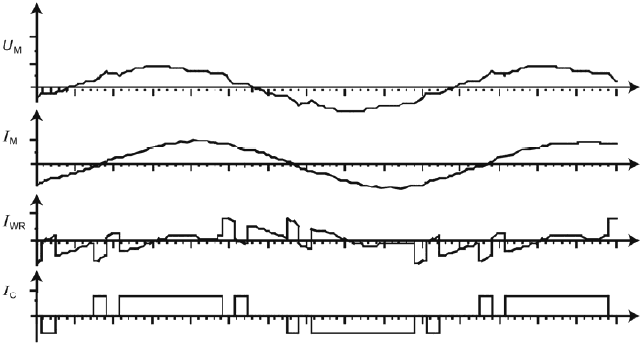
![]() - напряжение на двигателе;
- напряжение на двигателе; ![]() - ток в конденсаторе фильтра;
- ток в конденсаторе фильтра; ![]() - ток в двигателе;
- ток в двигателе; ![]() - ток на выходе инвертора
- ток на выходе инвертора
Рисунок 35 - Формы напряжений и токов системы с ШИМ-инвертором тока
15.2 Потери и их влияние
Из-за относительно низкого содержания высоких гармоник в напряжении и токе дополнительные потери в стали меньше, чем в машинах, питаемых от преобразователей с инверторами напряжения. Не следует ожидать существенных коммутационных потерь. Дополнительные потери в обмотке статора сопоставимы с потерями в машинах, питаемых от преобразователей с инверторами напряжения, поэтому перемещение витков обычно не требуется (в отличие от утверждений в 13.2).
Примечание - Хотя напряжения гармоник ШИМ-инверторов тока ниже, чем таковые у ШИМ-инверторов напряжения, их частоты также ниже. Поэтому невозможно дать общее суждение об относительных амплитудах токов гармоник.
Утверждения 11.3.2 остаются в силе.
15.3 Шум, вибрация и крутильные колебания
Утверждения 11.4 остаются в силе.
15.4 Электрические перенапряжения в изоляции двигателя
Утверждения 13.4 остаются в силе.
15.5 Токи через подшипники
Утверждения 13.5 остаются в силе.
16 Асинхронные двигатели с фазным ротором при питании ротора от преобразователей с инверторами напряжения
16.1 Характеристики системы
Машины с контактными кольцами и питанием ротора от преобразователей с инверторами напряжения обычно используются как генераторы ветровых турбин мощностью выше 1000 кВт, но могут также использоваться и как двигатели. Преобразователи обычно оснащаются активным входным каскадом для коррекции коэффициента мощности (см. IEC/TS 62578). Обмотка статора подключается непосредственно к электрической сети.
Скорость электропривода определяется уравнением ![]() , где
, где ![]() - частота сети,
- частота сети, ![]() - частота на выходе преобразователя. Это означает, что как в двигательном, так и в генераторном режимах возможна работа на скоростях ниже и выше синхронной скорости
- частота на выходе преобразователя. Это означает, что как в двигательном, так и в генераторном режимах возможна работа на скоростях ниже и выше синхронной скорости ![]() .
.
Главное преимущество этой системы состоит в том, что преобразователь не должен быть рассчитан на полную номинальную мощность асинхронной электрической машины, а лишь на небольшую часть, которая зависит от максимального скольжения и требований по реактивной мощности в случае коррекции коэффициента мощности. Кроме того, можно использовать низкое напряжение двухуровневого преобразователя для цепи ротора даже при том, что обмотка статора - для высокого напряжения.
16.2 Потери и их воздействие
Так как обмотка статора подключается непосредственно к электрической сети, содержание гармоник в токе статора очень низкое, и дополнительные потери незначительны. Для обмотки ротора применяются общие утверждения раздела 5. Особое внимание должно быть уделено току смещения в обмотке ротора. Для асинхронных машин с фазным ротором с номиналами в диапазоне МВт обмотку ротора обычно изготавливают в виде твердых медных шин. Так как частота тока в роторе электрических машин с двойным питанием может превышать 10 Гц, потери в обмотке ротора могут быть значительно увеличены путем вытеснения тока, что увеличивает эффективное омическое сопротивление его обмотки. Этот эффект необходимо учитывать и компенсировать потери из-за гармоник тока в обмотке ротора, вызванные работой преобразователя.
16.3 Шум, вибрация и крутильные колебания
Утверждения 11.4 остаются в силе.
16.4 Электрические перенапряжения в изоляции двигателя
Так как статорная обмотка подключена непосредственно к сети, то напряжение изоляции не отличается от обычного для электрических машин с фиксированной скоростью вращения. Для обмотки ротора утверждения 11.5 остаются в силе.
16.5 Токи через подшипники
Из-за непосредственной емкостной связи уровень электрического напряжения на подшипниках намного выше для машин, подключенных к преобразователю по цепи ротора, чем в варианте подключения преобразователя к статору. Поэтому подшипники подвергаются опасности. Рекомендуются заземляющая щетка и изоляция обоих подшипников для обеспечения сопротивления: по крайней мере 100 Ом при 1 МГц. Чтобы защитить приводимое в движение оборудование и его вспомогательные устройства, соединение должно быть электрически изолированным.
17 Другие системы "преобразователь-двигатель"
17.1 Питание двигателей от циклоконверторов
Циклоконвертор (непосредственный преобразователь частоты) не имеет промежуточной цепи постоянного тока. Он состоит из трех отдельных преобразователей для каждой из трех фаз двигателя (см. рисунок 36). Эти отдельные преобразователи управляются независимо с целью выработки синусоидального выходного тока применением непосредственного подключения фазы двигателя к одной из фаз сети на определенный промежуток времени. Выходная частота менее 50% от частоты сети. Для синхронных двигателей возможен единичный коэффициент мощности.
|
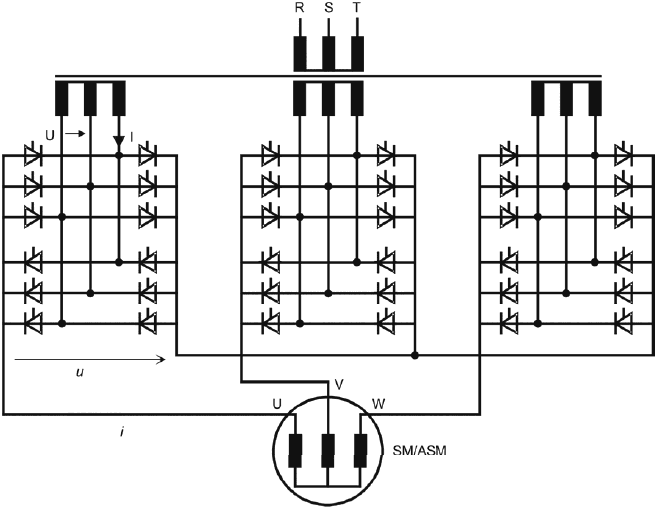
Рисунок 36 - Схема циклоконвертора
Хотя ток регулируют так, чтобы он был почти синусоидальным, работа циклоконвертора предполагает приложение к двигателю напряжения импульсной формы (см. рисунок 37). Вследствие этого нерационально питать двигатель с двумя тангенциально смещенными системами обмоток напряжениями, смещенными по фазе от двух преобразователей. Если используются два преобразователя, то их выходные напряжения должны совпадать по фазе и системы обмоток двигателя не должны быть смещены по окружности статора. Как альтернатива, преобразователи могут быть соединены последовательно, чтобы сформировать 12-пульсный преобразователь.
Так как преобразователи обычно оснащены тиристорами, то усиленная система изоляции двигателя обычно не требуется.
Частоты гармоник напряжения и тока определяются правилом
![]() ,
,
где ![]() - пульсность преобразователя (6 или 12);
- пульсность преобразователя (6 или 12);
![]() ,
, ![]() =0; ±1; ±2… - результирующие частоты колебаний вращающего момента
=0; ±1; ±2… - результирующие частоты колебаний вращающего момента ![]() . Амплитуда колебаний вращающего момента довольно низка, но увеличивается с ростом выходной частоты преобразователя. Хотя гармонические компоненты для
. Амплитуда колебаний вращающего момента довольно низка, но увеличивается с ростом выходной частоты преобразователя. Хотя гармонические компоненты для ![]() =0 обычно не упоминаются в литературе, они являются результатом бестоковых пауз между положительной и отрицательной полуволнами.
=0 обычно не упоминаются в литературе, они являются результатом бестоковых пауз между положительной и отрицательной полуволнами.
|
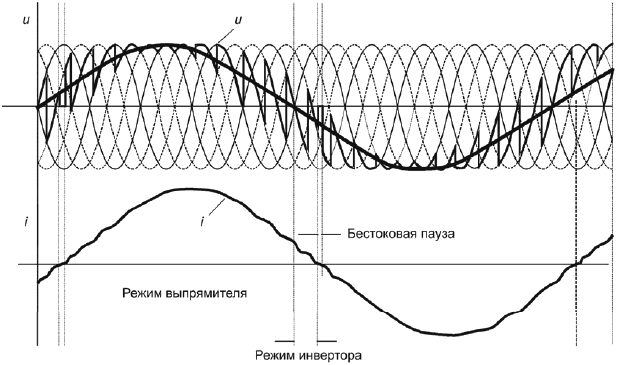
Рисунок 37 - Формы напряжения и тока циклоконвертора
17.2 Асинхронные двигатели с фазным ротором при питании ротора от преобразователей с инвертором тока в цепи ротора
Эти устройства известны как подсинхронные (или суперсинхронные) преобразовательные каскады (super-synchronous converter cascade, SSCC). Статор асинхронной машины с фазным ротором непосредственно соединен с сетью. Контактные кольца подключены к инвертору тока таким образом, что можно передавать электрическую мощность роторной цепи ![]() (
( - скольжение;
![]() - мощность, потребляемая от сети, минус потери в статоре) из цепи ротора назад в сеть.
- мощность, потребляемая от сети, минус потери в статоре) из цепи ротора назад в сеть.
Преимущество таких систем относительно систем с короткозамкнутыми асинхронными двигателями с питанием от преобразователя заключается в том, что номинальная мощность преобразователя в подсинхронном преобразовательном каскаде, является только частью, пропорциональной ![]() , от мощности преобразователя, требующегося для питания статора короткозамкнутого асинхронного двигателя, при предположении, что скорость регулируется в диапазоне от
, от мощности преобразователя, требующегося для питания статора короткозамкнутого асинхронного двигателя, при предположении, что скорость регулируется в диапазоне от ![]() до
до ![]() .
.
Так как характер токов ротора однотипен с токами статора асинхронных короткозамкнутых двигателей, питаемых от преобразователей с инверторами тока, то применимы положения 13.1.
Ток ротора содержит гармоники с номерами n=+1; -5; +7; -11; +13..., вызывающие дополнительные потери в обмотке ротора. В случае обычной обмотки стержневого типа в фазном роторе асинхронных двигателей эти дополнительные потери значительно возрастут из-за вытеснения тока. Так как преобразователи обычно оснащены тиристорами, усиленная система изоляции обычно не требуется.
Токи гармоник приводят к колебаниям момента на валу с частотами 6![]() и кратным им, требуя при проектировании внимания в отношении крутильных резонансов вращающихся частей.
и кратным им, требуя при проектировании внимания в отношении крутильных резонансов вращающихся частей.
Для предотвращения негативных воздействий токов через подшипники рекомендуется применять заземляющую щетку.
18 Особые замечания для стандартных асинхронных машин с фиксированной скоростью при питании от преобразователя с инверторами напряжения
18.1 Снижение номинальных значений крутящего момента во время работы преобразователя
Когда электрическая машина питается от преобразователя, то при номинальной частоте доступный крутящий момент, как правило, меньше, чем номинальный крутящий момент при синусоидальном напряжении из-за увеличения роста температуры (гармонических потерь). Еще одной причиной для снижения может быть падение напряжения преобразователя. Поддержание номинального значения крутящего момента может привести к снижению срока службы изоляции.
Сплошная линия на рисунке 38 относится к производимому преобразователем примерно такому же основному потоку электрической машины, как и при синусоидальном питании. Производитель электрической машины может определить повышение температуры для рабочей точки, если известен спектр гармоник преобразователя. Повышение температуры зависит от индивидуальных особенностей конструкции машины и типа охлаждения (например, IC 01 или IC 0141). При определении коэффициента снижения номинальных величин важное значение имеет тепловой запас конкретной электрической машины. Принимая во внимание все эти влияния, коэффициент снижения при номинальной частоте обычно находится в диапазоне от 0,8 до 1,0.
|
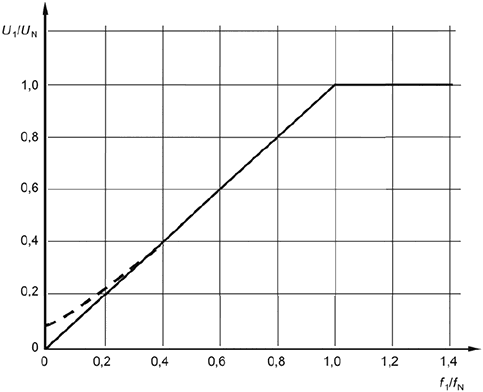
Рисунок 38 - Основное напряжение ![]() в зависимости от рабочей частоты
в зависимости от рабочей частоты ![]()
Часто на практике номинальные параметры преобразователя не предполагают, что номинальный поток двигателя при номинальной частоте такой же, как и при синусоидальном напряжении. Следствием этого является дополнительное отклонение крутящего момента, значение которого зависит от индивидуальных параметров.
В пределах диапазона настройки скорости ниже синхронной скорости на номинальной частоте электрической машины применение постоянного отношения ![]() приводит к постоянному значению критического момента только в том случае, если сопротивление обмотки статора пренебрежимо мало по сравнению с реактивными сопротивлениями электрической машины. Для того чтобы скомпенсировать эффект влияния сопротивления статора электрической машины, система управления преобразователя сконфигурирована так, чтобы иметь характеристику в соответствии с пунктирной линией на рисунке 38. На низких скоростях генерируются более высокие крутящие моменты, чем при отсутствии такой компенсации.
приводит к постоянному значению критического момента только в том случае, если сопротивление обмотки статора пренебрежимо мало по сравнению с реактивными сопротивлениями электрической машины. Для того чтобы скомпенсировать эффект влияния сопротивления статора электрической машины, система управления преобразователя сконфигурирована так, чтобы иметь характеристику в соответствии с пунктирной линией на рисунке 38. На низких скоростях генерируются более высокие крутящие моменты, чем при отсутствии такой компенсации.
Выше рабочей точки, до которой отношение напряжения к частоте равно 1, выходное напряжение преобразователя при увеличении частоты, как показано на рисунке 38, обычно остается постоянным (диапазон ослабления поля). В этом случае в пределах частот рабочего диапазона поток и, соответственно, максимальный крутящий момент снижаются в соответствии с характеристикой, показанной на рисунке 39, выше ![]() =1,0.
=1,0.
На рисунке 39 показан пример кривой уменьшения мощности для обычной электрической машины. Такая кривая может быть предоставлена изготовителем электрической машины, если спектр гармоник и характеристики "напряжение - частота преобразователя" известны. Что касается различных типов охлаждения (IC 01 или IC 411) и методов вентиляции (естественной циркуляции охлаждения или независимое охлаждение), предоставить универсальную кривую не представляется возможным. Снижение номинальных параметров, как правило, ослабляется при увеличении частоты коммутации.
|
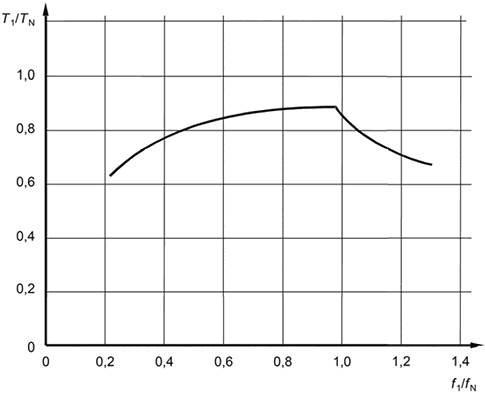
Рисунок 39 - Пример коэффициента снижения момента асинхронного двигателя исполнения N, IC 0141 (самоохлаждение) в функции частоты ![]()
18.2 Потери и их воздействие
В разделе 7.2.1 IEC 60034-1:2010 допустимое содержание гармоник питающего асинхронный короткозамкнутый двигатель напряжения выражено единственной численной величиной, называемой коэффициентом нелинейных искажений (![]() или HVF). Однако этот параметр не применим для случая питания от преобразователя.
или HVF). Однако этот параметр не применим для случая питания от преобразователя.
18.3 Шум, вибрация и крутильные колебания
Утверждения пункта 6 остаются в силе.
18.4 Электрические перенапряжения в изоляции двигателя
Механизм отрицательного воздействия преобразователя на изоляцию двигателя описан в разделе 7. Электрические машины со всыпной обмоткой, выполненной эмалированным проводом круглого сечения, выдерживает импульсы напряжения на клеммах в соответствии с кривой A на рисунке 40 без заметного сокращения срока службы.
Сочетание высокочастотного инвертора с кабелем может вызвать пики напряжения, вызванные эффектом длинной линии. Для машин с номинальным напряжением до 500 В переменного тока включительно изоляционная система выдержит пики напряжения по кривой А на рисунке 40 без сокращения срока службы. Внимание следует уделить электроприводам с регулируемой скоростью, в которых возможно быстрое ее изменение, приводящее к двукратному по отношению к номинальному напряжению на выходе преобразователя.
Для электрических машин напряжением свыше 500 В, питаемых от инвертора, могут понадобиться усовершенствованная изоляционная система и/или фильтры на выходе преобразователя, предназначенные для ограничения времени нарастания и/или пикового значения напряжения.
|
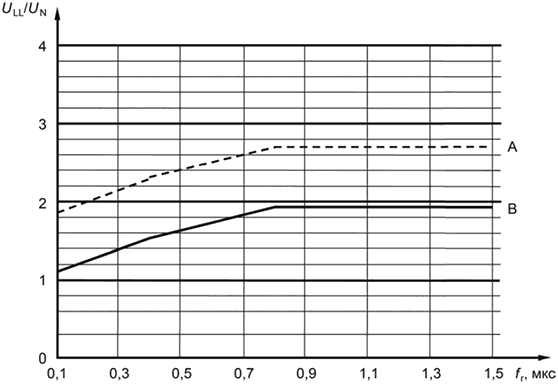
A - стандартные машины; B - машины со старой системой изоляции
Рисунок 40 - Предельные кривые допустимых относительных импульсных напряжений (пиковое значение линейного напряжения, включая отражение и демпфирование, по отношению к номинальному) на клеммах машины в функции времени нарастания скорости
Ожидаемое импульсное напряжение на клеммах двигателя может быть определено, как описано в IEC/TS 61800-8, где ULL эквивалентно UPP.
Найденное повторяющееся импульсное напряжение должно быть меньше изображенного кривой А на рисунке 40. Действительное значение импульсного напряжения определяется топологией электропривода (входной со стороны питания и выходной секциями преобразователя, фильтрами, кабелями и системой заземления). Устойчивость старых изоляционных систем к импульсам напряжения представлена кривой B на рисунке 40. Для уточнения допустимых уровней импульсного напряжения рекомендуется обратиться к производителю машины.
В некоторых электроприводах импульсное напряжение "фаза-земля" может превосходить линейное напряжение, поэтому оно также не может превышать предельные кривые на рисунке 40.
18.5 Токи через подшипники
Механизм возникновения токов через подшипники описан в разделе 8.
Опыт эксплуатации стандартных электрических машин с правильно выбранной системой заземления позволяет констатировать следующее.
- Электрические машины, находящиеся в сфере применения настоящего стандарта и имеющие высоту вала до 280 мм включительно, редко испытывают отказ подшипников из-за преобразователя. Вместе с тем нагрузка на изоляцию подшипников варьируется в широких пределах в зависимости от принципа управления и особенно - частоты коммутации преобразователя. При частотах коммутации свыше 10 кГц и выходном напряжении преобразователя более 400 В изоляция подшипников должна проверяться.
- В электрических машинах, находящихся в сфере применения настоящего стандарта, изоляция подшипников качения может осуществиться путем замены подшипника на изолированный того же типоразмера. Для машин, имеющих высоту вала 315 мм и выше, рекомендуется изоляция сопротивлением по крайней мере 100 Ом при 1 МГц. Необходимость изолировать оба подшипника электрической машины возникает редко. В таких случаях весьма желательна комплексная проверка электропривода экспертом, включая приводную машину (изоляция соединения) и систему заземления (возможно использование заземляющих щеток).
- Для электрических машин, находящихся в сфере применения настоящего стандарта и имеющих высоту вала 315 мм и выше, в которых не рассматривается или невозможна изоляция подшипников, рекомендуется уменьшить du/dt на выходе преобразователя или использовать преобразователь с фильтром, рассчитанным на уменьшение составляющей нулевой последовательности фазного напряжения.
18.6 Максимальная безопасная рабочая частота вращения
Если предполагается работа электрической машины при скоростях выше номинальной, максимальная безопасная рабочая скорость должна быть взята из заводской таблички. Если иное не установлено, предельное значение скорости берется из раздела 9.6 IEC 60034-1:2010. В зависимости от конструкции машины может быть разрешена более высокая скорость, но это должно быть подтверждено производителем.
Работа на скоростях выше номинальной сопровождается усилением уровней шума и вибрации. Может также потребоваться дополнительная балансировка для обеспечения приемлемой работы на повышенных скоростях.
Работа на скоростях, близких к максимально безопасным в течение длительного интервала времени, может привести к заметному сокращению срока службы подшипников. Кроме того, должны быть пересмотрены интервалы замены уплотнителей и смазки.
19 Специфика синхронных индукторных двигателей при питании от преобразователей с инверторами напряжения
19.1 Характеристики системы
Электропривод, состоящий из преобразователя с инвертором напряжения и синхронного индукторного двигателя, по сравнению с асинхронным, управляемым от инвертора напряжения, имеет следующие преимущества.
- Потери в электродвигателе могут быть ниже. Для расчета КПД системы должны быть учтены потери в преобразователе.
- Меньший размер электрической машины по сравнению с асинхронной электрической машиной того же номинала.
- Отсутствие потерь в обмотке ротора определяет более низкую температуру подшипников по сравнению с асинхронной электрической машиной.
- Более простая система охлаждения электрической машины вследствие минимальных потерь в роторе.
19.2 Потери и их воздействие
Утверждения пункта 5 остаются в силе.
19.3 Шум, вибрация и крутильные колебания
Утверждения пункта 6 остаются в силе.
19.4 Электрические перенапряжения в изоляции двигателя
Утверждения пункта 7 остаются в силе.
19.5 Токи через подшипники
Утверждения пункта 8 остаются в силе.
19.6 Отдельные аспекты синхронных индукторных двигателей
- Коэффициент мощности, как правило, не столь высок, как у асинхронных электрических машин.
- Работа в области ослабления поля требует специальных мер для обеспечения необходимого крутящего момента.
Приложение A
(справочное)
Характеристики преобразователя
A.1 Системы регулирования
A.1.1 Общие положения
A.1.1.1 Основные замечания
Существуют различные системы частотного регулирования: скалярная, векторная (бездатчиковая или с обратной связью), прямое управление потоком и прямое управление моментом и т.д. У каждого типа есть различные особенности, которые описаны в A.1.1.2-A.1.1.4.
А.1.1.2 Скалярное управление
Скалярное регулирование - это стандартная структура управления с характеристикой U/f преобразователя. В таком преобразователе выходным напряжением управляют в соответствии с выходной частотой. На рисунке 3 показано, как это происходит.
При выходном напряжении, пропорциональном частоте, двигатель работает с приблизительно постоянным потоком даже без обратной связи по скорости.
Для улучшения пуска и работы на низких скоростях обычно используются увеличение напряжения (к выходному напряжению преобразователя добавляется фиксированное напряжение), обычная IR-компенсация (компенсация падения напряжения на обмотках статора) или динамическая компенсация напряжения.
Форсировка по напряжению более эффективна на низких скоростях при низком напряжении питания двигателя, но важно учитывать, что она не должна приводить к насыщению двигателя.
Более совершенная IR-компенсация предполагает, что увеличение напряжения пропорционально нагрузке двигателя. Существует множество скалярных систем управления со своими особыми алгоритмами для компенсации падения напряжения на сопротивлении обмоток статора и его индуктивности. В результате пусковые характеристики двигателя значительно улучшаются, улучшается и режим работы на малых скоростях благодаря использованию дополнительного напряжения двигателя и обратной связи по току. Подобные системы управления могут обеспечивать качество момента, близкое к векторному управлению, даже на низких частотах.
Скалярная система в основном применяется в решениях, где быстрая реакция по моменту или по скорости не нужна, а также широко применяется в многодвигательных системах, питаемых от одного преобразователя.
А.1.1.3 Векторное управление
Преобразователь с системой векторного управления, по существу, выделяет из тока двигателя два его компонента, управляя потоком намагничивания и вращающим моментом раздельно. Это достигается благодаря применению математической модели двигателя как при использовании датчика обратной связи по скорости, так и без него.
В соответствии с различными требованиями к характеристикам системы могут применяться математические модели двигателя с различным уровнем приближения. Применение датчика обратной связи по скорости может улучшить свойства электропривода.
Векторное управление обычно применяется, когда требуется быстрая реакция системы на воздействие по скорости или моменту.
A.1.1.4 Прямое управление потоком и моментом двигателя
Система прямого управления моментом и потоком двигателя использует релейный принцип управления (скользящий режим работы релейного регулятора), регулируя поток и вращающий момент двигателя с применением математической модели двигателя как с датчиком обратной связи по скорости, так и без него.
В этой системе нет никакого модулятора, коммутация каждого силового ключа преобразователя реализуется отдельно. Применение датчика обратной связи по скорости может улучшить свойства электропривода.
Прямое управление моментом обычно применяется, когда требуется быстрый отклик системы на воздействие по скорости или моменту.
A.1.2 Типы преобразователей
Все три типа регулирования могут использоваться для решений, требующих поддержания момента, как и для применений, где момент увеличивается со скоростью (например, в центробежных насосах или вентиляторах). Однако для гарантии оптимального выбора преобразователя и надежного функционирования системы должны быть учтены все технологические аспекты конкретного решения.
Стоит отметить следующие основные обстоятельства:
- использование скалярной системы регулирования позволяет управлять несколькими двигателями (с разными параметрами) с помощью одного преобразователя;
- системы скалярного регулирования может быть недостаточно из-за специальных требований, например при работе под нагрузкой на низких скоростях (менее 10% номинальной скорости), хотя работа на низких скоростях может быть улучшена применением динамической компенсации падения напряжения;
- как и в векторной бездатчиковой структуре регулирования, в скалярной структуре можно поддерживать постоянный момент, применяя динамическую компенсацию напряжения;
- самое существенное различие между скалярным, векторным регулированием и прямым управлением моментом заключается в динамике;
- векторная система или система прямого управления потоком и моментом может потребоваться, если необходимо:
- регулирование на близких к нулю скоростях;
- прецизионное управление моментом;
- обеспечить пиковое значение момента на низкой скорости;
- при использовании векторной структуры или структуры прямого управления моментом и потоком можно управлять несколькими двигателями от одного преобразователя, но при условии совпадения их характеристик;
- характеристики векторной структуры управления и структуры прямого управления моментом почти одинаковы, так как в обеих использована математическая модель двигателя (с датчиками потока и скорости или без них).
Более подробно см. IEC 61800-2.
A.2 Формирование выходного напряжения преобразователя (для преобразователей напряжения)
A.2.1 Широтно-импульсная модуляция (ШИМ)
ШИМ охватывает такие схемы формирования выходного напряжения, в которых команды коммутации преобразователя образуются контроллером, работающим на несущей частоте (модулятором).
Модулятор управляет импульсами таким образом, что выходное напряжение повторяет заданную величину.
Примечание - Под выходным напряжением понимаются среднее значение за время, соответствующее частоте коммутации, и мгновенное значение относительно периода основной гармоники выходного напряжения преобразователя.
Несущая частота может быть синхронизирована с частотой питания или выходной частотой. Она может выбираться исходя из минимума потерь, пульсаций тока, шума, она может быть переменной ("качающаяся" или "случайная" ШИМ) для распределения спектра гармоник в широком диапазоне.
Для оптимизации формы тока или его спектра, например для уменьшения пиков тока или ликвидации некоторых гармоник, могут применяться специальные средства управления.
A.2.2 Релейное управление (скользящий режим)
Скользящий режим охватывает такие схемы формирования выходного напряжения, в которых команды коммутации преобразователя образуются несинхронизированным контроллером, вырабатывающим команды коммутации лишь в те моменты, когда возникает разница между реальным значением регулируемой переменной и сигналом ее задания.
Такой тип коммутации может использоваться для регулирования напряжения, тока, потока, момента в зависимости от системы управления.
A.2.3 Влияние частоты коммутации
Высокочастотная коммутация преобразователя влияет на все элементы электропривода: вызывает потери в машине и преобразователе, акустический шум и пульсации момента. Затруднительно оценить точно это влияние, однако в общем виде оно представлено на рисунках A.1, A.2 и A.3. Данные рисунки не предназначены для сравнительных вычислений.
Примечание 1 - На рисунке А.1 вертикальная шкала для двигателя и преобразователя имеют разные масштабы.
Примечание 2 - Для схем модуляции, не имеющих несущую частоту, выражение "частота коммутации" означает среднее число переключающих импульсов в секунду.
A.2.4 Многоуровневые преобразователи
В схемах двухуровневых преобразователей, описанных выше, выходное напряжение формируется путем переключения нагрузки с положительной на отрицательную шину звена постоянного тока.
Многоуровневые преобразователи предлагают промежуточные уровни потенциала, а потому частотный спектр гармоник имеет значительно меньшие амплитуды и смещен в область высоких частот.
Примечание - Поскольку многоуровневые инверторы требуют значительно большего числа полупроводниковых ключей, они характерны для высоковольтных применений (см. IEC 61800-4).
A.2.5 Параллельная работа преобразователей
Если преобразователь имеет два и более инверторных моста, работающих параллельно, то к ним можно присоединить столько же параллельных ветвей трехфазного двигателя, соединив их попарно.
Если гармоники напряжения преобразователя имеют заметную по сравнению с основной величину, рекомендуется не смещать выходные напряжения мостов по фазе относительно друг друга, как и не смещать системы обмоток, чтобы избежать больших гармоник тока.
В преобразователях с релейным управлением обмотки геометрически смещаются на 30°/p, а приложенное к ним напряжение - на 30 градусов по фазе.
|
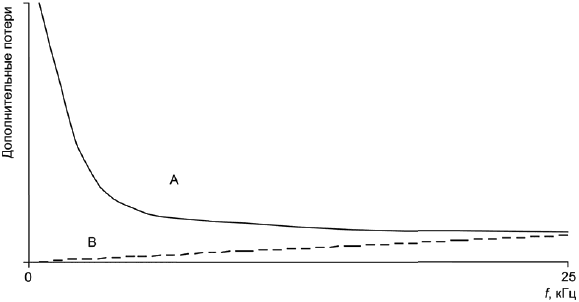
A - потери в электрической машине; B - потери в преобразователе
Рисунок А.1 - Влияние частоты коммутации на потери в двигателе и преобразователе
|
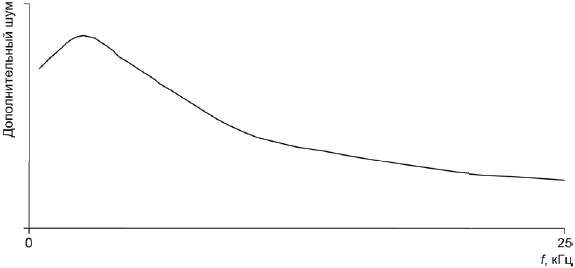
Рисунок А.2 - Влияние частоты коммутации на акустический шум
|
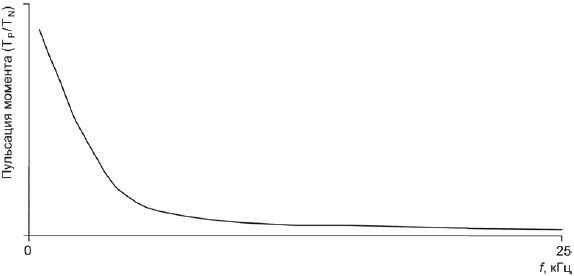
Рисунок А.3 - Влияние частоты коммутации на пульсации крутящего момента
Приложение B
(справочное)
Выходные характеристики двухуровневого преобразователя с инвертором напряжения
Форма выходного напряжения преобразователя, а потому и спектр выходного напряжения, различны в зависимости от принципа работы преобразователя. Типичная форма выходного напряжения представлена на рисунке B.1. Примеры спектров гармоник на выходе инверторов, работающих с постоянной частотой коммутации ШИМ около 2,5 кГц, а также использующих релейную коммутацию при прямом управлении моментом (среднее значение частоты около 2,2 кГц), показаны на рисунке B.2.
|
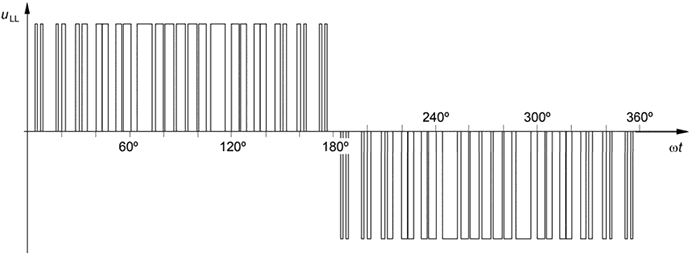
Рисунок B.1 - Форма линейного напряжения ![]() инвертора напряжения с частотой коммутации
инвертора напряжения с частотой коммутации ![]() =30
=30![]()
Преобразователи с модуляцией на несущей частоте по синхронному и асинхронному принципу во многих применениях вырабатывают частоты
![]() ,
,
где ![]() =1, 2, 3… и
=1, 2, 3… и ![]() =1, 2, 4, 5, 7… - коэффициенты частоты коммутации
=1, 2, 4, 5, 7… - коэффициенты частоты коммутации ![]() и рабочей частоты
и рабочей частоты ![]() соответственно.
соответственно.
Данная формула применима также для преобразователей с пространственно-фазовой модуляцией.
Преобразователи без модуляции на несущей частоте, где нет предварительно заданной частоты коммутации, также используются на практике. Для них частотный спектр выходного напряжения характеризуется широкополосным случайным шумом без пиков на определенных частотах.
|
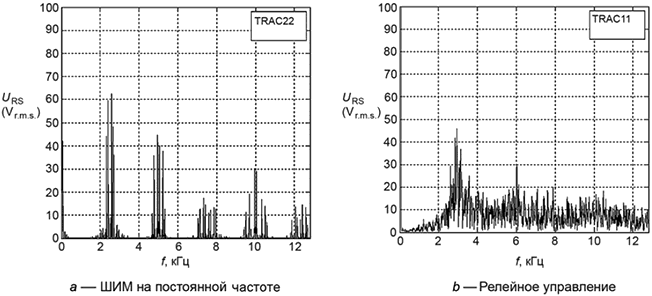
Рисунок B.2 - Типичные частотные спектры выходного напряжения преобразователя
Рисунки B.3 позволяют сравнить типичные выходные спектры инверторов со случайной частотой коммутации ШИМ (среднее значение приблизительно 2,2 кГц) и инверторов, использующих релейную коммутацию.
|
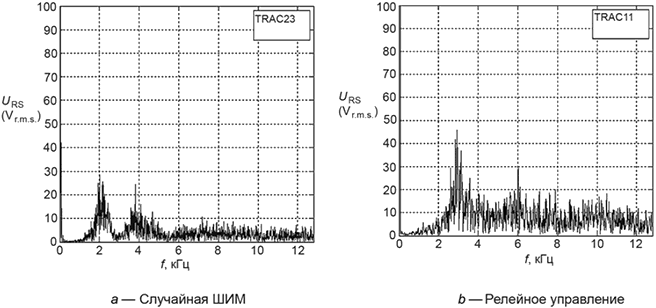
Рисунок B.3 - Типичные частотные спектры выходного напряжения преобразователя
На рисунках B.4 показаны типичные спектры для: a - преобразователя с модуляцией по двум фазам на 4 кГц, средняя частота приблизительно 2,7 кГц; b - преобразователя с релейной модуляцией и прямым управлением моментом на средней частоте 2,7 кГц.
|
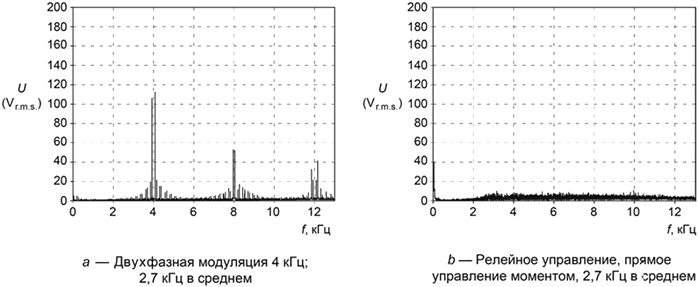
Рисунок В.4 - Типичные спектры выходного напряжения преобразователей
В указанных выше случаях частота выходного напряжения преобразователя составляет приблизительно 40 Гц, а характеристики нагрузки двигателей неизменны. Частотные спектры при релейной коммутации или случайной частоте коммутации ШИМ ниже по амплитуде, чем при постоянной частоте коммутации ШИМ или при модуляции по двум фазам, но распределены более широко по частотному диапазону.
|
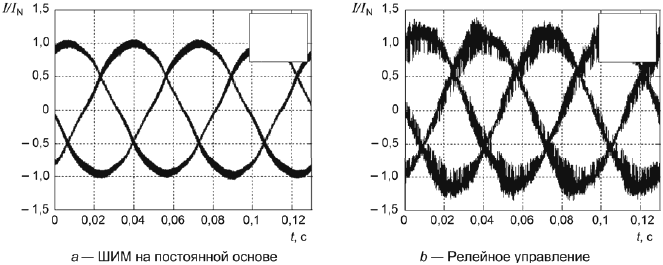
Рисунок B.5 - Типичные осциллограммы тока машины
Рисунки B.5 показывают нормализованные осциллограммы токов двигателей для двух преобразователей, спектры которых приведены на рисунке В.2, в этом случае выходная частота составляет приблизительно 10 Гц.
|
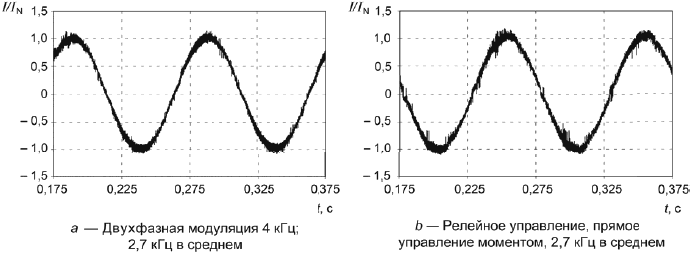
Рисунок B.6 - Типичные осциллограммы тока машины
Рисунки B.6 показывают осциллограммы токов двигателей для двух преобразователей, спектры которых приведены на рисунке B.3, в этом случае выходная частота составляет приблизительно 10 Гц.
Рисунки B.1-B.6 приведены только для иллюстрации. Они не должны использоваться как характеристики типов преобразователей. Все методы получения выходного напряжения могут быть оптимизированы специальными способами для эффективного использования преимуществ и недостатков разных преобразователей в конкретном применении.
Приложение C
(справочное)
Напряжения, возникающие между преобразователем и электрической машиной
На практике напряжение на клеммах электрической машины, питающейся от преобразователя, особенно с инвертором напряжения, отличается от идеальной картины импульсов, представленной на рисунке B.1, из-за высокочастотных переходных процессов. Типичный пример такого отличия представлен на рисунке C.1. На данные процессы значительное влияние оказывают длина и тип кабеля, соединяющего двигатель с преобразователем, элементы системы заземления, время нарастания импульсов напряжения, выходные фильтры и т.п.
|
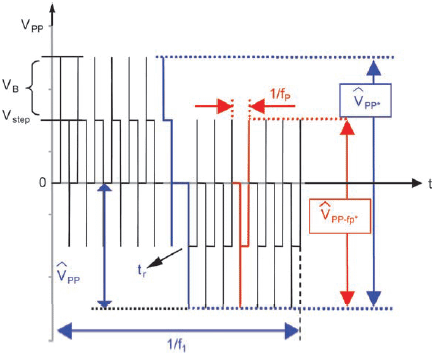
Рисунок C.1 - Пример типичных кривых линейного напряжения двухуровневого инвертора в зависимости от времени на клеммах двигателя (напряжение "фаза - фаза", взят из IEC/TS 61800-8)
Это не дает возможности дать универсальную оценку максимальным значениям импульсов напряжения. Вместо этого предлагается определить перенапряжение для каждого конкретного применения на основе стандарта IEC/TS 61800-8, который предоставляет необходимую информацию.
Примечание - Стандарт IEC/TS 61800-8 использует иные символы, нежели серия стандартов IEC 60034. В частности, для обозначения напряжения ![]() используется
используется ![]() , линейное напряжение
, линейное напряжение ![]() обозначается как
обозначается как ![]() .
.
Для того чтобы найти максимальные значения линейных и фазных напряжений на клеммах двигателя и другие необходимые для правильного выбора изоляции величины, нужна следующая информация.
- По питающей сети: ее номинальное напряжение и система питания (TN, TT, IT).
- Входное звено преобразователя (выпрямитель): однофазный, трехфазный, активный трехфазный, включая звено постоянного тока со сглаживающим реактором (при наличии).
- Выходное звено (инвертор): двух-, трех- или многоуровневый инвертор (с конденсатором).
- Фильтры (при наличии): высокочастотный синфазный, du/dt, выходной дроссель или синусоидальный.
- Кабели: длина и параметры (емкость и индуктивность) на единицу длины.
Стандарт IEC/TS 61800-8 показывает влияние этих данных на максимальное напряжение в форме таблиц с соответствующими коэффициентами. Алгоритм вычислений далее проиллюстрирован двумя примерами, показывающими значительное влияние структуры и состава электропривода на напряжение.
Пример 1
Электрическая машина мощностью 3 кВт с 400-вольтовым питанием от двухуровневого преобразователя с диодным выпрямителем через двухметровый кабель без фильтра.
Система питания
TN - сеть с глухозаземленной нейтралью номинальным напряжением 400 В
Коэффициент усиления в дифференциальном режиме (раздел 5.4, таблица 1)
![]() =1,1, включая 10% допуска на линейное напряжение.
=1,1, включая 10% допуска на линейное напряжение.
Коэффициент усиления в синфазном режиме (раздел 5.5, таблица 2)
![]() =0.
=0.
Входное звено преобразователя
Трехфазный диодный выпрямитель без реактора и динамического торможения
Коэффициент усиления в дифференциальном режиме (раздел 6.8, таблица 6)
![]() =1,35.
=1,35.
Коэффициент усиления в синфазном режиме (раздел 6.9, таблица 7)
![]() =0.
=0.
Выходное звено преобразователя
Двухуровневый инвертор
Коэффициент усиления в дифференциальном режиме (раздел 7.9, таблица 18)
![]() =1.
=1.
Коэффициент усиления в синфазном режиме (раздел 7.10, таблица 19)
![]() =±1/2.
=±1/2.
Динамические параметры (раздел 7.11, таблица 20)
![]() =50 … 200 нс,
=50 … 200 нс, ![]() =5 … 300.
=5 … 300.
Фильтр
Фильтр отсутствует
Коэффициент усиления в дифференциальном режиме (раздел 8.4, таблица 21)
![]() =1.
=1.
Коэффициент усиления в синфазном режиме (раздел 8.5, таблица 22)
![]() =1.
=1.
Динамические параметры (разделы 8.4 и 8.5, таблицы 21 и 22)
![]() 50 … 200 нс.
50 … 200 нс.
Кабель и электрическая машина
Номинальная мощность машины до 3,7 кВт, кабель длиной 2 метра с удельной индуктивностью 650 нГн/м и емкостью 130 пФ/м
Скорость распространения (раздел 9.1, формула 27)
v - 1/sqrt(650 Гн/м130 пФ/м)=109 м/мкс
Критическая длина кабеля (раздел 9.1, формула 28)
![]() =0,5
=0,5109 м/мкс
(50 … 200) нс =2,725 м … 10,9 м
длина кабеля не превышает критическую
Коэффициент отражения (раздел 9.2, таблица 23)
=0,95
Коэффициент усиления дифференциального режима (раздел 9.3, таблица 24)
![]() =(2·0,95/2,725+1)=1,7
=(2·0,95/2,725+1)=1,7
Коэффициент усиления синфазного режима (раздел 9.3, таблица 24)
![]() =(2·0,95/2,725+1)=1,7
=(2·0,95/2,725+1)=1,7
Динамические параметры (раздел 9.3, таблица 24)
![]() =(50 … 200) нс·(2·0,95/2,725+1)=(85 … 340) нс
=(50 … 200) нс·(2·0,95/2,725+1)=(85 … 340) нс
Пиковое напряжение "фаза-земля" на клеммах двигателя
![]() =1,1·400 В / 1,732·(1,35·1·1·1,7)+1,1·400 В·(0+0±0,5)·1·1,7=583 В ±374 В =209 В … 957 В
=1,1·400 В / 1,732·(1,35·1·1·1,7)+1,1·400 В·(0+0±0,5)·1·1,7=583 В ±374 В =209 В … 957 В
Амплитуда пикового напряжения "фаза-фаза" на клеммах двигателя
![]() =1,1·400 В·(1,35·1·1·1,7)=1010 В.
=1,1·400 В·(1,35·1·1·1,7)=1010 В.
Пример 2
Электрическая машина мощностью 3 кВт с 690-вольтовым питанием через 50-метровый кабель от двухуровневого преобразователя с диодным выпрямителем, несимметричным реактором в звене постоянного тока без фильтра, с динамическим торможением.
Система питания
IT - сеть с номинальным напряжением 690 В
Коэффициент усиления в дифференциальном режиме (раздел 5.4, таблица 1)
![]() =1,1, включая 10% допуска на линейное напряжение.
=1,1, включая 10% допуска на линейное напряжение.
Коэффициент усиления в синфазном режиме (раздел 5.5, таблица 2)
![]() =0,577.
=0,577.
Входное звено преобразователя
Трехфазный диодный выпрямитель с несимметричным реактором в звене постоянного тока, с резистором и прерывателем для динамического торможения
Коэффициент усиления в дифференциальном режиме (раздел 6.8, таблица 6)
![]() =1,6.
=1,6.
Коэффициент усиления в синфазном режиме (раздел 6.9, таблица 7)
![]() =±0,675.
=±0,675.
Выходное звено преобразователя
Двухуровневый инвертор
Коэффициент усиления в дифференциальном режиме (раздел 7.9, таблица 18)
![]() =1.
=1.
Коэффициент усиления в синфазном режиме (раздел 7.10, таблица 19)
![]() =±1/2.
=±1/2.
Динамические параметры (раздел 7.11, таблица 20)
![]() =50 … 200 нс,
=50 … 200 нс, ![]() =5 … 300.
=5 … 300.
Фильтр
Фильтр отсутствует
Коэффициент усиления в дифференциальном режиме (раздел 8.4, таблица 21)
![]() =1.
=1.
Коэффициент усиления в синфазном режиме (раздел 8.5, таблица 22)
![]() =1.
=1.
Динамические параметры (разделы 8.4 и 8.5, таблица 21 и 22)
![]() 50 … 200 нс.
50 … 200 нс.
Кабель и электрическая машина
Номинальная мощность машины до 3,7 кВт, кабель длиной 50 метров с удельной индуктивностью 650 нГн/м и емкостью 130 пФ/м
Скорость распространения (раздел 9.1, формула 27)
v - 1/sqrt(650 нГн/м130 пФ/м)=109 м/мкс
Критическая длина кабеля (раздел 9.1, формула 28)
![]() =0,5
=0,5109 м/мкс
(50 … 200) нс =2,725 м … 10,9 м
длина кабеля превышает критическую
Коэффициент отражения (раздел 9.2, таблица 23)
=0,95
Коэффициент усиления дифференциального режима (раздел 9.3, таблица 24)
![]() =1+0,95=1,95
=1+0,95=1,95
Коэффициент усиления синфазного режима (раздел 9.3, таблица 24)
![]() =1+0,95=1,95
=1+0,95=1,95
Динамические параметры (раздел 9.3, таблица 24)
![]() =(50 … 200) нс·(1+0,95)=(97,5 … 390) нс
=(50 … 200) нс·(1+0,95)=(97,5 … 390) нс
Пиковое напряжение "фаза-земля" на клеммах двигателя
![]() =1,1·690 В / 1,732·(1,6·1·1·1,95)+1,1·690 В·(0,577±0,675±0,5)·1·1,95=(1367 В - 885 В) … (1367 В + 2593 В)=482 В … 3960 В
=1,1·690 В / 1,732·(1,6·1·1·1,95)+1,1·690 В·(0,577±0,675±0,5)·1·1,95=(1367 В - 885 В) … (1367 В + 2593 В)=482 В … 3960 В
Амплитуда пикового напряжения "фаза-фаза" на клеммах двигателя
![]() =1,1·690 В·(1,6·1·1·1,95)=2368 В.
=1,1·690 В·(1,6·1·1·1,95)=2368 В.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
IEC 60034-1:2010 | IDT | ГОСТ IEC 60034-1-2014 "Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики" |
IEC 60034-2-1 | IDT | ГОСТ IEC 60034-2-1-2017 "Машины электрические вращающиеся. Часть 2-1. Стандартные методы определения потерь и коэффициента полезного действия по испытаниям (за исключением машин для подвижного состава)" |
IEC 60034-2-2 | - | * |
IEC/TS 60034-2-3 | IDT | ГОСТ IEC/TS 60034-2-3-2015 "Машины электрические вращающиеся. Часть 2-3. Специальные методы определения потерь и коэффициента полезного действия асинхронных двигателей переменного тока с питанием от преобразователя" |
IEC 60034-6 | - | * |
IEC 60034-9:2003 | - | * |
IEC 60034-12 | - | * |
IEC 60034-14:2007 | - | * |
IEC/TS 60034-18-41:2014 | IDT | ГОСТ IEC/TS 60034-18-41-2014 "Машины электрические вращающиеся. Часть 18-41. Квалификационные и типовые испытания для систем электроизоляции типа I, используемых во вращающихся электрических машинах с питанием от преобразователей источника напряжения" |
IEC/TS 60034-18-42 | IDT | ГОСТ IEC/TS 60034-18-42-2014 "Машины электрические вращающиеся. Часть 18-42. Квалификационные и приемочные испытания для систем электроизоляции, стойких к частичному разряду, типа II, используемых во вращающихся электрических машинах с питанием от преобразователей источника напряжения" |
IEC 60050 (all parts) | - | * |
IEC TR 61000-5-1 | - | * |
IEC TR 61000-5-2 | - | * |
IEC 61800-2:1998 | - | * |
IEC 61800-3 | - | * |
IEC 61800-5-1 | - | * |
IEC/TS 61800-8:2010 | IDT | IEC/TS 61800-8:2018* "Электрические приводные системы с регулируемой скоростью. Часть 8. Спецификация напряжения на силовом сопряжении" |
________________ * Вероятно, ошибка оригинала. Следует читать: ГОСТ IEC/TS 61800-8-2017. - . | ||
IEC/TS 62578:2009 | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
УДК 621.313.3:006.351 | МКС 29.160 | Е60 |
Ключевые слова: машины электрические вращающиеся, машины переменного тока, питание от преобразователей | ||
Электронный текст документа
и сверен по:
, 2018
{kind=link}