ГОСТ IEC 62127-1-2015
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Государственная система обеспечения единства измерений
ПАРАМЕТРЫ УЛЬТРАЗВУКОВЫХ ПОЛЕЙ
Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц
State system for ensuring the uniformity of measurements. Parameters of ultrasonic fields. General requirements to measuring methods and characterization of fields in tine frequency range 0,5 to 40 MHz
МКС 17.140.50
Дата введения 2017-07-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-2015 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2015 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт физико-технических и радиотехнических измерений" (ФГУП "ВНИИФТРИ") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Межгосударственным техническим комитетом по стандартизации МТК 206 "Эталоны и поверочные схемы"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 28 декабря 2015 г. N 83-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Казахстан | KZ | Госстандарт Республики Казахстан |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 7 сентября 2016 г. N 1073-ст межгосударственный стандарт ГОСТ IEC 62127-1-2015 введен в действие в Российской Федерации для применения в качестве национального стандарта с 1 июля 2017 г.
5 Настоящий стандарт идентичен международному стандарту IEC 62127-1:2007* "Ультразвук. Гидрофоны. Часть 1. Измерение и описание ультразвуковых полей медицинского назначения на частотах до 40 МГц" ("Ultrasonics - Hydrophones - Part 1: Measurement and characterization of medical ultrasonic fields up to 40 MHz", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ 1.5 (подраздел 3.6).
Международный стандарт разработан Техническим комитетом 87 "Ультразвук" Международной электротехнической комиссии (IEC).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 Настоящий стандарт подготовлен на основе применения ГОСТ Р МЭК 62127-1-2009*
_______________
* Приказом Федерального агентства по техническому регулированию и метрологии от 7 сентября 2016 г. N 1073-ст ГОСТ Р МЭК 62127-1-2009 отменен с 1 июля 2017 г.
7 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт распространяется на гидрофоны для измерений параметров ультразвукового поля, генерируемого в воде ультразвуковым медицинским оборудованием в диапазоне частот от 0,5 до 40 МГц, и устанавливает:
- группу акустических параметров, которые могут быть измерены акустическими методами;
- вторую группу параметров, значения которых могут быть вычислены по результатам этих измерений при определенных допущениях и называются вычисляемыми параметрами интенсивности;
- условия, при которых могут быть измерены акустические параметры с помощью гидрофонов в частотном диапазоне до 40 МГц;
- процедуры введения поправок и ограничений, связанных с использованием гидрофонов с ограниченной полосой частот и конечными размерами активного элемента.
Примечания
1 В настоящем стандарте использованы величины в единицах международной системы единиц СИ. Однако для удобства представления некоторых параметров, таких, например, как площадь пучка или интенсивность, могут быть применены и другие кратные 10 единицы. Например, площадь пучка может быть выражена в см, а интенсивности - в Вт/см
или в мВт/см
.
2 По определению гидрофоны могут быть как пьезоэлектрическими, так и оптоволоконными. Настоящий стандарт не распространяется на оптоволоконные гидрофоны.
3 Термины, устанавливаемые в разделе 3, выделены в тексте полужирным шрифтом.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие международные стандарты*:
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
IEC 60050-801:1994 International Electrotechnical Vocabulary. Chapter 801. Acoustics and electroacoustics (Международный электротехнический словарь. Глава 801. Акустика и электроакустика)
IEC 60565:2006, Underwater acoustics - Hydrophones - Calibration in the frequency range 0,01 Hz to 1 MHz (Гидроакустика. Гидрофоны. Калибровка в частотном диапазоне от 0,01 Гц до 1 МГц)
IEC 60854:1986, Methods of measuring the performance of ultrasonic pulse-echo diagnostic equipment (Методы измерения характеристик ультразвукового эхоимпульсного диагностического оборудования)
IEC 61689:2007, Ultrasonics - Physiotherapy systems - Field specifications and methods of measurement in the frequency range 0,5 MHz to 5 MHz (Ультразвук. Аппараты для ультразвуковой терапии. Требования к параметрам излучаемого поля и методам их измерения в диапазоне частот от 0,5 до 5 МГц)
IEC 61828:2001, Ultrasonics - Focusing transducers - Difinitions and measurement methods for the transmitted fields (Ультразвук. Фокусирующие преобразователи. Определения и методы измерения параметров излучаемых полей)
IEC 61846:1998, Ultrasonics - Pressure pulse lithotripters - Characteristics of fields (Ультразвук. Литотриптеры, излучающие импульсы давления. Характеристики полей)
IEC 61847:1998, Ultrasonics - Surgical systems - Measurement and declaration of the basic output characteristics (Ультразвук. Хирургические системы. Измерение основных акустических характеристик и информация о них)
IEC 62127-2:2007, Ultrasonics - Hydrophones - Part 2: Calibration for ultrasonic fields up to 40 MHz (Ультразвук. Гидрофоны. Часть 2. Калибровка для измерения параметров ультразвуковых полей до 40 МГц)
IEC 62127-3:2007, Ultrasonics - Hydrophones - Part 3: Properties of hydrophones for ultrasonic fields up to 40 MHz (Ультразвук. Гидрофоны. Часть 3. Свойства гидрофонов для измерения параметров ультразвуковых полей до 40 МГц)
ISO 16269-6:2005, Statistical interpretation of data - Part 6: Determination of statistical tolerance intervals (Статистическая обработка данных. Часть 6. Определение статистических интервалов допусков)
ISO/IEC Guide 98-3:2008 Uncertainty of measurement - Part 3: Guide to the expression of uncertainty in measurement (GUM:1995) (Неопределенность измерений. Часть 3. Руководство по выражению неопределенности измерений)
Примечание - Надлежащего использования настоящего стандарта требуют следующие документы:
IEC 61157, Standard means for the reporting of the acoustic output of medical diagnostic ultrasonic equipment (Стандартные способы представления информации о параметрах акустического выхода медицинского диагностического ультразвукового оборудования)
IEC 62359, Ultrasonics - Field characterization - Test methods for the determination of thermal and mechanical indices related to medical diagnostic ultrasonic fields (Ультразвук. Описание поля. Методы испытаний для определения тепловых и механических индексов, относящихся к медицинским диагностическим ультразвуковым полям)
IEC 61847, Ultrasonics - Surgical systems - Measurement and declaration of the basic output characteristics (Ультразвук. Хирургические системы. Измерение основных акустических характеристик и информация о них)
3 Термины, определения и обозначения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 волновая форма акустического импульса (acoustic pulse waveform): Зависимость от времени мгновенного значения акустического давления в определенной точке акустического поля, наблюдаемая за достаточно большой период, для получения существенной акустической информации о простом или заполненном импульсе за один или несколько периодов непрерывной волны [69] (см. дополнение к библиографии).
3.2 период акустического повторения (acoustic repetition period) arp, с: Период повторения импульсов для несканирующих систем и период повторения сканирования для систем автоматического сканирования, равный интервалу времени между двумя эквивалентными точками следующих друг за другом заполненных импульсов.
3.3 акустическая частота, частота акустического воздействия (acoustic frequency, acoustic-working frequency), Гц: Частота акустического сигнала, определяемая по сигналу с гидрофона, установленного в точке акустического поля, соответствующей максимальному (во времени и в пространстве) значению акустического давления.
Примечания
1 Сигнал с гидрофона исследуют с помощью анализатора спектра или измерением времени пересечения волновой формы сигнала нулевых значений (подробнее см. 3.3.1 и 3.3.2).
2 Часто данное определение неприемлемо, особенно для широкополосных преобразователей. В этом случае для введения частотно-зависимых поправок в результаты измерений целесообразно пользоваться более полным описанием спектра принимаемого гидрофоном сигнала.
3.3.1 частота акустического воздействия "по нулевым точкам" (zero-crossing acoustic-working frequency) : Величина, определяемая временем пересечения волновой формы линии нулевых значений по методике, описанной в IEC 60854.
Примечание - Это определение предназначено только для систем непрерывной волны.
3.3.2 среднеарифметическая частота акустического воздействия (arithmetic-mean acoustic-working frequency) : Арифметическое среднее наиболее удаленных друг от друга частот
и
, лежащих в диапазоне, равном 3
, на которых амплитуда спектра акустического давления снижается на минус 3 дБ относительно пикового значения.
Примечания
1 Данное определение применимо только для импульсно-волновых систем.
2 Подразумевается, что <
.
3.3.3 акустическая частота по пику импульса (peak pulse acoustic frequency) , Гц: Среднеарифметическая частота акустического воздействия в импульсе с наибольшим значением пик-отрицательного акустического давления, измеренная в точке поля, соответствующей максимальному значению пик-отрицательного акустического давления.
3.3.4 усредненная во времени акустическая частота (time average acoustic frequency) , Гц: Среднеарифметическая частота акустического воздействия по усредненному по времени акустическому давлению в спектре акустического сигнала, измеренного в точке поля, соответствующей максимальному значению усредненной по времени интенсивности.
3.4 азимутальная ось (azimuth axis): Линия пересечения азимутальной плоскости и плоскости апертуры источника (определенной при измерениях) или плоскости апертуры преобразователя (определенной при его проектировании) (см. IEC 61828 и рисунок 1).
3.5 азимутальная плоскость (azimuth plane): Плоскость сканирования для сканирующих ультразвуковых преобразователей или главная продольная плоскость для несканирующих преобразователей (см. IEC 61828 и рисунок 1).
3.6 ширина полосы (bandwidth) BW, Гц: Разность наиболее отдаленных друг от друга частот и
, на которых амплитуда спектра акустического давления в заданной точке акустического поля снижается до уровня минус 3 дБ ниже пикового значения.
3.7 площадь пучка (beam area) , м
: Площадь в заданной плоскости, перпендикулярной к оси ультразвукового пучка, включающая в себя все точки, для которых интеграл квадратов давления в импульсе больше определенной (см. примечание 3) части максимального значения интеграла квадратов давления в импульсе в этой плоскости.
Примечания
1 Если положение плоскости не обусловлено, то подразумевается, что она включает в себя точку, соответствующую максимальному (в пространстве и времени) акустическому давлению.
2 Во многих случаях термин "интеграл квадратов давления в импульсе" заменяют его линейными эквивалентами, например:
a) для непрерывного волнового излучения - среднеквадратичным акустическим давлением [IEC 61689];
b) термином "усредненная во времени интенсивность", если трудно достичь синхронизации измеряемого и излучаемого сигналов.
3 За определенную часть максимального давления как правило принимают его значения, умноженные на 0,25 и 0,01, соответствующие площади пучка "на уровне минус 6 дБ" и "на уровне минус 20 дБ" соответственно.
4 Это определение несколько изменено по сравнению с приведенным в IEC 61828.
3.8 ось ультразвукового пучка (beam axis): Прямая линия, проходящая через центральные точки пучка, принадлежащие двум параллельным плоскостям, перпендикулярным к прямой линии, соединяющей точку максимального интеграла квадратов давления в импульсе с центром внешней апертуры преобразователя (см. рисунок 1).
х - азимутальная ось; у - ось пучка; z - ось обзора; 1 - плоскость внешней апертуры преобразователя; 2 - плоскость апертуры источника; 3 - плоскость апертуры; 4 - плоскость площади пучка; 5 - линии ширины пучка; 6 - азимутальная плоскость, плоскость сканирования; 7 - плоскость обзора; 8 - продольная плоскость; 9 - главная продольная плоскость
Рисунок 1 - Схема расположения различных плоскостей и линий при сканировании ультразвукового поля
Примечания
1 Положение первой из плоскостей определяется нахождением в ней точки с максимальным интегралом квадратов давления в импульсе (т.е. фокуса). Вторая плоскость должна отстоять от первой как можно дальше, а сканирование в ней следует осуществлять по тем же ортогональным осям х и у, что и в первой плоскости.
2 Во многих случаях термин "интеграл квадратов давления в импульсе" заменяют его линейными эквивалентами, например:
a) для непрерывно-волнового излучения он может быть заменен среднеквадратичным акустическим давлением (см. IEC 61689);
b) если трудно достичь синхронизации измеряемого и излучаемого сигналов, то термин "интеграл квадратов давления в импульсе" можно заменить усредненной во времени интенсивностью.
3 Это определение несколько изменено по сравнению с приведенным в IEC 61828.
3.9 центральная точка ультразвукового пучка (beam centrepoint): Точка пересечения двух линий, соответствующих середине пучка в двух ортогональных плоскостях ху и yz (IEC 61828).
3.10 середина пучка (beamwidth midpoint): Усредненная линия, проходящая через точки половинных значений ширины пучка, лежащей в какой-то одной плоскости (IEC 61828).
Примечание - Усреднение проводят по множеству значений ширины пучка, указанных в таблице К.1 приложения К.
3.11 ширина пучка (beamwidth) ,
,
, м: Наибольшее расстояние между двумя точками, лежащими на заданной оси, перпендикулярной к оси ультразвукового пучка, на которых интеграл квадратов давления в импульсе уменьшается по сравнению с его максимумом (на оси ультразвукового пучка) на определенное значение.
Примечания
1 Во многих случаях термин "интеграл квадратов давления в импульсе" заменяют пропорциональными ему величинами, например:
a) для непрерывно-волнового излучения термин "интеграл квадратов давления в импульсе" может быть заменен среднеквадратичным акустическим давлением, определенным в IEC 61689;
b) если трудно достичь синхронизации измеряемого и излучаемого сигналов, то термин "интеграл квадратов давления в импульсе" допускается заменить термином "усредненная во времени интенсивность".
2 Как правило, используют значения ширины пучка на уровнях уменьшения интенсивности, равных минус 6 дБ, минус 12 дБ и минус 20 дБ. При этом децибел определяют как десять десятичных логарифмов отношения интегралов.
3 Это определение несколько изменено по сравнению с приведенным в IEC 61828.
3.12 широкополосный преобразователь (broadband transducer): Преобразователь, генерирующий акустические импульсы, ширина полосы которых больше среднеарифметической частоты акустического воздействия.
3.13 центральная линия сканирования (central scan line): Для систем автоматического сканирования линия ультразвукового сканирования, ближайшая к оси симметрии плоскости сканирования.
3.14 диаметральное сканирование пучка (diametrical beam scan): Ряд измерений напряжения на выходе гидрофона при перемещении последнего вдоль прямой линии, проходящей через точку на оси пучка и в направлении, перпендикулярном к его оси.
Примечание - Диаметральное сканирование пучка может распространяться на различные расстояния по разные стороны от оси пучка.
3.15 расстояние (distance) , м: Расстояние по оси пучка от плоскости, содержащей пиковое значение акустического давления разрежения, до плоскости внешней апертуры преобразователя.
3.16 расстояние (distance) , м: Расстояние по оси пучка от плоскости, содержащей пиковое значение акустического давления сжатия, до плоскости внешней апертуры преобразователя.
3.17 расстояние (distance) , м: Расстояние по оси пучка от плоскости, содержащей максимальное значение интеграла квадратов давления в импульсе, до плоскости внешней апертуры преобразователя.
3.18 расстояние (distance) , м: Расстояние по оси пучка от плоскости, содержащей пик-пространственную усредненную во времени интенсивность, до плоскости внешней апертуры преобразователя.
Примечание - На практике значения ![]() и
и равны друг другу.
3.19 расстояние (distance) , м: Расстояние по оси пучка от плоскости излучающей поверхности ультразвукового преобразователя или группы элементов преобразователя до плоскости внешней апертуры преобразователя.
Примечание - Определение заимствовано из IEC 61828, но обозначение термина изменено.
3.20 импеданс электрической нагрузки (electric load impedance) , Ом: Комплексное значение входного электрического импеданса (включающее в себя реальную и мнимую части), к которому подключен или должен быть подключен выходной разъем кабеля гидрофона (IEC 62127-3).
3.21 эффективный радиус гидрофона (effective hydrophone radius) ,
, м: Радиус гидрофона в виде жесткого диска, который имеет расчетную диаграмму направленности, угловой сектор которой равен угловому сектору измеренной диаграммы направленности рассматриваемого гидрофона (IEC 62127-3).
Примечания
1 Угловой сектор определяют по уровню снижения диаграммы направленности относительно ее максимального значения. Для уровней снижения, равных 3 и 6 дБ, эффективный радиус обозначают как и
/
2 Значения радиуса зависят от частоты. Типичные экспериментальные данные см. в [1].
3.22 эффективный радиус несфокусированного преобразователя (effective radius of a non-focused ultrasonic transducer) , м: Радиус идеального поршневого ультразвукового преобразователя, имеющего расчетную зависимость акустического давления от расстояния от преобразователя по его оси, приблизительно эквивалентную наблюдаемой зависимости рассматриваемого преобразователя на расстояниях не менее чем до последнего осевого максимума акустического давления.
3.23 ось обзора (elevation axis): Линия, лежащая в плоскости измеренной апертуры источника или в плоскости проектируемой апертуры преобразователя и перпендикулярная к азимутальной оси (см. IEC 61828 и рисунок 1).
3.24 плоскость обзора (elevation plane): Продольная плоскость, содержащая ось обзора (см. IEC 61828 и рисунок 1).
3.25 чувствительность на конце кабеля под нагрузкой; чувствительность гидрофона (или гидрофона с предусилителем) на конце кабеля под нагрузкой (end-of-cable loaded sensitivity); (end-of-cable loaded sensitivity of a hydrophone or hydrophone-assembly) (f), B/Па: Отношение мгновенного значения электрического напряжения на конце постоянно подсоединенного кабеля или разъема гидрофона (или гидрофона с предусилителем), подсоединенного к электрическому импедансу нагрузки, к мгновенному акустическому давлению в свободном невозмущенном акустическом поле плоской волны в точке, соответствующей акустическому центру гидрофона, при отсутствии гидрофона в этой точке (IEC 62127-3).
3.26 чувствительность холостого хода на конце кабеля; чувствительность холостого хода на конце кабеля гидрофона [end-of-cable open-circuit sensitivity (of a hydrophone)]; (f), B/Па: Отношение мгновенного значения электрического напряжения холостого хода на конце постоянно подсоединенного кабеля или разъема гидрофона (или гидрофона с предусилителем) к мгновенному акустическому давлению в свободном невозмущенном акустическом поле плоской волны в точке, соответствующей акустическому центру гидрофона, при условии отсутствия гидрофона в этой точке (IEC 62127-3).
3.27 внешняя апертура преобразователя (external transducer aperture): Часть поверхности преобразователя или группы элементов преобразователя, которая излучает ультразвук в среду распространения (см. IEC 61828 и рисунок 1).
Примечание - Эта поверхность либо находится в непосредственном контакте с телом пациента, либо контактирует с ним через воду или другую жидкую среду.
3.28 дальнее поле (far field): Акустическое (звуковое) поле на тех расстояниях от ультразвукового преобразователя, на которых мгновенное акустическое давление и колебательная скорость частиц практически совпадают по фазе (IEC 60050-801).
Примечание - В настоящем стандарте предполагается, что дальнее поле начинается с расстояния, равного ![]() , где
, где - площадь выхода пучка, а
- длина ультразвуковой волны, соответствующая акустической частоте. Это предположение строго выполняется только для круглых поршневых преобразователей.
3.29 геометрический радиус гидрофона (hydrophone geometrical radius) , м: Радиус, определяемый размерами активного элемента гидрофона (IEC 62127-3).
3.30 гидрофон (hydrophone): Преобразователь, который генерирует электрические сигналы при воздействии на него акустических сигналов в воде.
3.31 гидрофон с предусилителем (hydrophone assembly): Гидрофон, совмещенный с предварительным усилителем в одном корпусе (IEC 62127-3).
3.32 предусилитель гидрофона (hydrophone pre-amplifier): Активное электронное устройство, которое соединяют или требуется соединить с гидрофоном для снижения его выходного импеданса (IEC 62127-3).
Примечания
1 Предусилитель гидрофона требует электрического питания.
2 Коэффициент усиления предусилителя гидрофона может быть и менее 1, т.е. предусилитель может и не быть усилителем.
3.33 мгновенное значение акустического (звукового) давления (instantaneous acoustic pressure) p(t), Па: Разность между давлением, существующим в рассматриваемый момент времени в некоторой точке среды, и статическим давлением.
3.34 мгновенное значение интенсивности (instantaneous intensity) I(t), Вт/м: Акустическая энергия, проходящая за единицу времени в направлении распространения акустической волны через единичную площадь, перпендикулярную к этому направлению, в рассматриваемый момент времени в некоторой точке акустического поля.
Примечание - Мгновенное значение интенсивности представляет собой произведение мгновенных значений акустического давления и колебательной скорости. Измерить интенсивность в ультразвуковом диапазоне частот затруднительно. При измерении параметров в соответствии с настоящим стандартом в условиях дальнего поля мгновенное значение интенсивности I(t) выражают как:
![]() , (1)
, (1)
где p(t) - мгновенное значение акустического давления, Па;
- плотность среды распространения, кг/м
;
с - скорость звука в среде, м/с.
3.35 продольная плоскость (longitudinal plane): Плоскость, содержащая ось пучка и заданную ортогональную ей ось (см. IEC 61828 и рисунок 1).
3.36 среднее пиковое акустическое давление (mean peak acoustic pressure) , Па: Арифметическое среднее значение пикового акустического давления разрежения и пикового акустического давления сжатия (IEC 61949).
3.37 ближнее поле (near field): Область генерируемого ультразвуковым преобразователем акустического (звукового) поля, в которой разность фаз мгновенного акустического давления и колебательной скорости частиц непрерывно меняется от точки к точке в акустическом (звуковом) поле.
Примечание - Для круглых поршневых преобразователей это происходит на расстояниях, меньших ![]() , где
, где - площадь выхода пучка, а
- длина ультразвуковой волны, соответствующая акустической частоте.
3.38 параметр нелинейности распространения (non-linear propagation parameter) : Коэффициент, позволяющий вычислить нелинейное искажение ультразвука для конкретного ультразвукового преобразователя и определяемый по формуле:
 , (2)
, (2)
где - параметр нелинейности (для чистой воды при 20°С
=1+В/2А=3,5 [2]);
- угловая частота (
![]() , где
, где - частота акустического воздействия);
- расстояние от поверхности ультразвукового преобразователя до плоскости, содержащей точку, соответствующую пространственному пику пик-временного акустического давления;
- 0,69-я часть отношения геометрической площади ультразвукового преобразователя к площади пучка на уровне минус 6 дБ;
- среднее пиковое акустическое давление в точке акустического поля, соответствующей пространственному пику пик-временного акустического давления.
Примечание - Выражение (2) применимо к ультразвуковым полям, для которых >2,1.
3.39 Режимы работы системы (operating modes).
3.39.1 комбинированный режим (combined-operating mode): Режим работы системы, состоящий из комбинации двух или более дискретных режимов.
Примечание - К комбинированным режимам относятся режимы, в которых для получения изображения структур и доплеровской информации о них используются различные типы акустических импульсов: режим В в реальном времени, сочетающийся с режимом М (В+М); режим В в реальном времени, сочетающийся с импульсно-волновым доплером (B+D); цветовой режим М (сМ); режим В в реальном времени, сочетающийся с режимом М и импульсно-волновым доплером (B+M+D); режим В в реальном времени, сочетающийся с доплером цветового картирования в реальном времени (B+rD).
3.39.2 дискретный режим (discrete-operating mode): Режим работы медицинского ультразвукового диагностического оборудования, при котором возбуждение ультразвукового преобразователя или группы элементов ультразвукового преобразователя используется только для одного метода диагностики.
Примечание - К дискретным режимам относятся: режим А (А); режим М (М); статический режим В (sB); режим В в реальном времени (В); непрерывно-волновой доплер (cwD); импульсно-волновой доплер (D); режимы доплеровского картирования кровотока в статическом режиме (sD) или режиме реального времени (rD), использующие только один тип акустических импульсов.
3.39.3 инклюзивный режим (inclusive mode): Комбинированный режим, параметры акустического выхода ( и
) которого менее соответствующих им в конкретных дискретных режимах.
3.39.4 несканирующий режим (non-scanning mode): Режим работы системы, при котором следующие друг за другом ультразвуковые импульсы распространяются по одной и той же линии ультразвукового сканирования.
3.39.5 режим сканирования (scanning mode): Режим работы системы, включающий в себя последовательность ультразвуковых импульсов, образующих линии ультразвукового сканирования, смещенные друг относительно друга.
Примечание - Последовательность импульсов может содержать и неидентичные импульсы, например, в многофокусных системах.
3.40 площадь выхода пучка (output beam area) , м
: Площадь поперечного сечения ультразвукового пучка, вычисленная по площади (поперечного сечения) пучка на уровне минус 12 дБ на внешней апертуре преобразователя.
Примечания
1 Для повышения точности измерений площадь выхода пучка на уровне минус 12 дБ допускается вычислять по результатам измерений на расстоянии, наиболее близком (по возможности, не более 1 мм) к поверхности преобразователя.
2 Для контактных преобразователей за площадь выхода пучка допускается принимать геометрическую площадь ультразвукового преобразователя или группы элементов ультразвукового преобразователя.
3.41 размеры на выходе пучка (output beam dimensions) ,
, м: Размеры ультразвукового пучка (по ширине пучка на уровне минус 12 дБ) в определенных направлениях, перпендикулярных друг к другу и к оси ультразвукового пучка, на внешней апертуре преобразователя.
Примечания
1 Для повышения точности измерений размеры на выходе пучка на уровне минус 12 дБ допускается вычислять по результатам измерений на расстоянии, наиболее близком (по возможности, не более 1 мм) к поверхности преобразователя.
2 Для контактных датчиков за размеры на выходе пучка допускается принимать геометрические размеры ультразвукового преобразователя или группы элементов ультразвукового преобразователя.
3.42 интенсивность на внешней стороне датчика (output beam intensity) , Вт/м
: Усредненная по времени выходная мощность, деленная на площадь выхода пучка.
3.43 пиковое акустическое давление (peak acoustic pressure) (или
) или
(или
) Па: Пиковое акустическое давление сжатия или пиковое акустическое давление разрежения.
3.44 пиковое акустическое давление разрежения (peak-rarefactional acoustic pressure) (или
), Па: Максимум модуля отрицательного мгновенного значения акустического давления в акустическом поле или в определенной плоскости за период повторения акустических импульсов [см. рисунок С.4 (приложение С)].
Примечания
1 Значение пикового акустического давления разрежения выражают положительным числом.
2 Определение пикового акустического давления разрежения применимо также к используемому термину "пик-отрицательное акустическое давление".
3.45 пиковое акустическое давление сжатия (peak-compressional acoustic pressure) (или
), Па: Максимальное положительное мгновенное значение акустического давления в акустическом поле или в определенной плоскости за период повторения акустических импульсов.
Примечание - Определение пикового акустического давления сжатия применимо также к используемому в литературе термину "пик-положительное акустическое давление".
3.46 главная продольная плоскость (principal longitudinal plane): Плоскость, содержащая ось пучка и линию ширины пучка на уровне минус 6 дБ (см. IEC 61828 и рисунок 1).
Примечание - Для прямоугольных ультразвуковых преобразователей эта плоскость параллельна их длинной стороне.
3.47 усредненная по импульсу интенсивность (pulse-average intensity) , Вт/м
: Отношение интеграла интенсивности за импульс к длительности импульса в определенной точке акустического поля.
3.48 длительность импульса (pulse duretion) , с: 1,25-я часть временного интервала между моментами времени, когда интеграл по времени от квадрата мгновенного акустического значения достигает 0,1-й и 0,9-й частей своего конечного значения (см. рисунок 2).
Примечание - Конечное значение интеграла по времени от квадрата мгновенного акустического значения соответствует интегралу квадратов давления за импульс.
3.49 интеграл интенсивности в импульсе (pulse-intensity integral) pii, Дж/м: Интеграл по времени от мгновенной интенсивности в определенной точке акустического поля, взятый по всей волновой форме акустического импульса.
Примечание - Для измерений, установленных настоящим стандартом, интеграл интенсивности за импульс пропорционален интегралу квадратов давления за импульс.
3.50 интеграл квадратов давления в импульсе (pulse-pressure-squared integral) ppsi, Па·с: Интеграл по времени от квадратов мгновенных значений акустического давления, интегрируемых по всей волновой форме акустического импульса, в определенной точке акустического поля.
3.51 период повторения импульсов (pulse repetition period) prp, с: Интервал времени между двумя эквивалентными точками следующих друг за другом простых или заполненных импульсов.
Примечание - Данный термин применим как к несканирующим системам с одним элементом, так и к системам автоматического сканирования [69] (см. дополнение к библиографии).
3.52 частота повторения импульсов (pulse repetition rate) prr, Гц: Величина, обратная периоду повторения импульсов.
3.53 эффективное акустическое давление (rms acoustic pressure) , Па: Среднеквадратичное значение мгновенных акустических давлений в определенной точке акустического поля.
Примечание - Усреднение рекомендуется проводить по всем периодам акустического повторения, если не обусловлен иной способ усреднения.
3.54 площадь сканирования (scan-area) , м
: Для систем автоматического сканирования площадь на конкретной плоскости (поверхности), включающая в себя все точки в пределах площади пучка, пересекающего эту поверхность в процессе сканирования.
Примечание - Конкретная плоскость (поверхность) имеет ту же форму, что и внешняя апертура преобразователя.
3.55 плоскость апертуры источника (source aperture plane): Плоскость, наиболее близко расположенная к внешней апертуре преобразователя и перпендикулярная к оси пучка, на которой еще возможно провести измерения (см. IEC 61828 и рисунок 1).
3.56 плоскость сканирования (scan plane): Для систем автоматического сканирования плоскость, содержащая все ультразвуковые линии сканирования.
Примечание - В некоторых системах сканирования ультразвуковой пучок допускается перемещать в двух направлениях; к таким системам не применимо определение плоскости сканирования. Тем не менее и в этом случае может быть полезным рассмотреть плоскость, включающую в себя основную ось симметрии ультразвукового преобразователя и перпендикулярную к плоскости преобразователя, в качестве эквивалента плоскости сканирования.
3.57 период повторения сканирования (scan repetition period) srp, с: Интервал времени между идентичными точками на двух следующих друг за другом изображениях, получаемых с помощью системы автоматического сканирования.
Примечание - В общем случае настоящим стандартом предполагается, что каждая отдельная линия сканирования точно повторяется после излучения некоторого числа акустических импульсов. Если такой повторяемости нет, то параметры для такого режима сканирования невозможно определить методами, рассмотренными в настоящем стандарте. При отсутствии синхронизации может быть использован метод, приведенный в приложении F.
3.58 частота повторения сканирования (scan repetition rate) srr, Гц: Величина, обратная периоду повторения сканирования.
3.59 усредненная по пространству и времени интенсивность (spatial-average temporal-average intensity) , Вт/м
: Величина, равная значению усредненной по времени интенсивности, усредненному по площади сканирования или площади пучка.
3.60 пространственный пик усредненной по импульсу интенсивности (spatial-peak pulse-average intensity) , Вт/м
: Максимальное значение усредненной по импульсу интенсивности в акустическом поле или в конкретной плоскости.
3.61 пространственный пик эффективного акустического давления (spatial-peak rms acoustic pressure) , Па: Максимальное значение эффективного акустического давления в акустическом поле или в конкретной плоскости.
3.62 пространственный пик усредненной во времени интенсивности (spatial-peak temporal-average intensity) , Вт/м
: Максимальное значение усредненной во времени интенсивности в акустическом поле или определенной плоскости.
Примечание - Для систем, работающих в комбинированном режиме, интервал времени усреднения должен быть достаточным для того, чтобы включить в себя и время, при котором сигнал отсутствует.
3.63 пространственный пик временного пика акустического давления (spatial-peak temporal-peak acoustic pressure) , Па: Наибольшее из значений пикового акустического давления разрежения и пикового акустического давления сжатия.
3.64 пространственный пик временного пика интенсивности (spatial-peak temporal-peak intensity) , Вт/м
: Максимальное значение временного пика интенсивности в акустическом поле или в конкретной плоскости.
3.65 усредненная во времени интенсивность (temporal-average intensity) , Вт/м
: Усредненные по времени мгновенные значения интенсивности в конкретной точке акустического поля.
Примечание - Усреднение осуществляют, как правило, по всем периодам акустического повторения, если не установлен иной интервал усреднения.
3.66 временной пик интенсивности (temporal-peak intensity) , Вт/м
: Максимальное во времени мгновенное значение интенсивности в конкретной точке акустического поля.
3.67 временный пик акустического давления (temporal-peak acoustic pressure) , Па: Максимальное значение модуля мгновенного значения в конкретной точке акустического поля.
3.68 плоскость апертуры преобразователя (transducer aperture plane): Плоскость, перпендикулярная к оси пучка для несканирующих систем или оси симметрии азимутальной плоскости для систем автоматического сканирования и физически примыкающая к ультразвуковому преобразователю (IEC 61828).
Примечание - Для плоского ультразвукового преобразователя плоскость апертуры совпадает с его излучающей поверхностью; для вогнутого - соприкасается с периферийной частью излучающей поверхности; для выпуклого - касается центра излучающей поверхности (см. рисунок 1).
3.69 датчик (transducer assembley): Компонент медицинского ультразвукового диагностического оборудования, включающий в себя ультразвуковой преобразователь и/или группу элементов ультразвукового преобразователя совместно с некоторыми встроенными элементами, такими как акустические линзы, держатель и пр.
Примечание - Датчик, как правило, отделен от блока управления ультразвуковым прибором.
3.70 пульт управления ультразвуковым прибором (ultrasound instrument console): Электронная часть, к которой подсоединяют датчик.
3.71 линия ультразвукового сканирования (ultrasonic scan line): Для систем с режимами сканирования ось ультразвукового пучка как для некоторой группы элементов ультразвукового преобразователя, так и для конкретного возбуждения ультразвукового преобразователя или группы элементов ультразвукового преобразователя.
Примечания
1 Под линией сканирования понимают проходимый акустическим импульсом путь, а не линию, видимую на экране монитора системы.
2 Настоящим стандартом предполагается, что каждая отдельная линия сканирования повторяется после излучения некоторого числа акустических импульсов. Если такой повторяемости нет, то параметры для такого режима сканирования невозможно определить методами, описанными в настоящем стандарте. При отсутствии синхронизации может быть использован метод, приведенный в приложении F.
3 Излучение одновременно по нескольким направлениям в настоящем стандарте не рассмотрено.
3.72 разделение линий ультразвукового сканирования (ultrasonic scan line separation) , м: Для систем автоматического сканирования расстояние между точками пересечения двух оговоренных однотипных следующих друг за другом линий сканирования с заданной плоскостью.
Примечание - Предполагается, что следующие друг за другом линии сканирования соседние, что не всегда возможно для систем различных типов сканирования.
3.73 ультразвуковой преобразователь (ultrasonic transducer): Устройство преобразования электрической энергии в механическую и/или механическую энергию в электрическую в ультразвуковом диапазоне частот.
3.74 элемент ультразвукового преобразователя (ultrasonic transducer element): Элемент ультразвукового преобразователя, возбуждаемый для получения акустического сигнала.
3.75 группа элементов ультразвукового преобразователя (ultrasonic transducer element group): Группа элементов ультразвукового преобразователя, возбуждаемых совместно для получения акустического сигнала.
3.76 размеры группы элементов ультразвукового преобразователя (ultrasonic transducer element group dimensions), м: Размеры поверхности группы элементов группы элементов ультразвукового преобразователя, учитывающей размеры элементов и расстояния между ними.
Примечание - Для датчика секторного сканирования эти размеры определяют вдоль центральной линии сканирования. Если ультразвуковой преобразователь симметричен, то эти размеры определяют по главному лепестку направленности как можно ближе к оси или плоскости симметрии ультразвукового преобразователя.
3.77 неопределенность (измерений) (ucertainty): Параметр, связанный с результатом измерения, характеризующий дисперсию значений, которые обоснованно могут быть приписаны измеряемой величине [3].
4 Список обозначений
- эффективный радиус гидрофона; | |
- геометрический радиус гидрофона; | |
- эффективный радиус несфокусированного ультразвукового преобразователя; | |
| - эффективные радиусы активного элемента гидрофона, определенные по измерениям диаграммы направленности, при уровнях снижения минус 3 дБ и минус 6 дБ; |
- максимальный эффективный радиус гидрофона в его конкретном применении; | |
arp | - период акустического повторения; |
- площадь пучка; | |
- геометрическая площадь ультразвукового преобразователя; | |
- площадь выхода пучка; | |
- площадь сканирования; | |
BW | - ширина полосы; |
с | - скорость звука в среде распространения (как правило, в воде); |
C | - емкость на конце кабеля гидрофона; |
- входная емкость, параллельная нагрузке; | |
- акустическая частота, частота акустического воздействия; | |
- акустическая частота по пику импульса; | |
- усредненная по времени акустическая частота; | |
- 0,69· | |
I | - мгновенное значение интенсивности; |
- интенсивность на выходе пучка; | |
- усредненная по импульсу интенсивность; | |
- усредненная в пространстве и по импульсу интенсивность; | |
- усредненная в пространстве и во времени интенсивность; | |
- пространственный пик усредненной по импульсу интенсивности; | |
- усредненная по времени интенсивность; | |
- временной пик интенсивности; | |
- пространственный пик усредненной по времени интенсивности; | |
- пространственный пик пик-временной интенсивности; | |
k | - волновое число (= |
- поправочный коэффициент на пространственное усреднение; | |
| - чувствительность холостого хода на конце кабеля; |
| - чувствительность на конце кабеля под нагрузкой; |
p | - мгновенное значение акустического давления; |
pii | - интеграл интенсивности в импульсе; |
ppsi | - интеграл квадратов давления в импульсе; |
- среднее пиковое значение акустического давления; | |
- временной пик акустического давления; | |
prr | - частота повторения импульсов; |
prp | - период повторения импульсов; |
- пространственный пик эффективного акустического давления; | |
- пространственный пик временного пика акустического давления; | |
- эффективное акустическое давление; | |
| - пиковое акустическое давление сжатия; |
| - пиковое акустическое давление разрежения; |
P | - полная ультразвуковая мощность; |
- полная мощность ультразвукового излучения по одной линии сканирования; | |
- отношение ширины пучка на уровне минус 6 дБ к эффективному диаметру гидрофона; | |
- разделение линий ультразвукового сканирования; | |
srp | - период повторения сканирования; |
srr | - частота повторения сканирования; |
- длительность импульса; | |
| - напряжение на конце кабеля гидрофона; |
v | - мгновенная скорость частиц; |
| - выходные размеры пучка; |
z | - расстояние между гидрофоном и ультразвуковым преобразователем; |
- расстояние | |
- расстояние | |
- расстояние | |
- расстояние | |
- расстояние | |
- комплексный выходной электрический импеданс гидрофона или гидрофона с предусилителем; | |
- электрический импеданс нагрузки; | |
| - ширина пучка (на уровнях минус 6 дБ, минус 12 дБ и минус 20 дБ); |
- параметр нелинейности; | |
- угол падения ультразвуковой волны относительно оси гидрофона ( | |
- длина акустической волны в жидкости; | |
- удельная плотность среды распространения (как правило, воды); | |
- параметр нелинейности распространения; | |
- угловая частота. |
5 Требования к измерениям
5.1 Требования к гидрофонам и усилителям
5.1.1 Введение
Гидрофон и усилитель выбирают в соответствии с приведенными ниже требованиями. Изложенные в этом разделе требования к гидрофонам и усилителям дополняют или заменяют требования, установленные в IEC 62127-3.
5.1.2 Общие положения
В настоящем стандарте гидрофон рассматривают как устройство, реагирующее на акустические волны таким образом, что генерируемое им электрическое напряжение пропорционально акустическому давлению (IEC 60050-801). В общем случае это соотношение зависит от частоты, и его представляют следующим выражением (см. приложение D):
![]() , (3)
, (3)
где - мгновенное акустическое давление;
- обратное преобразование Фурье;
- результат преобразования Фурье от
.
Примечание - Реализация этого метода рассмотрена в приложении D.
Если гидрофон или гидрофон с предусилителем соответствуют узкополосному приближению, как это изложено в 5.1.7, то мгновенное акустическое давление можно определить из уравнения:
![]() , (4)
, (4)
где ![]() - чувствительность на конце кабеля под нагрузкой на частоте акустического воздействия.
- чувствительность на конце кабеля под нагрузкой на частоте акустического воздействия.
5.1.3 Чувствительность гидрофона
Если гидрофон применяют без предварительного усилителя, то чувствительность такого гидрофона должна соответствовать чувствительности на конце кабеля под нагрузкой, которая должна быть определена для конкретной электрической нагрузки (см. 3.20).
Если применяют предварительный усилитель, то чувствительность гидрофона также определяют как чувствительность на конце кабеля под нагрузкой, которая относится к конкретному гидрофону с предусилителем.
Примечания
1 Метод, изложенный в IEC 62127-3, может быть использован для определения чувствительности на конце кабеля под нагрузкой по известной чувствительности холостого хода на конце кабеля.
2 Примеры технических характеристик гидрофонов представлены в таблице В.1 приложения В.
5.1.4 Характеристика направленности гидрофона
Характеристика направленности гидрофона должна быть известной.
Симметрия диаграммы направленности должна соответствовать требованиям IEC 62127-3.
Примечание - Характеристику направленности гидрофона необходимо знать по двум причинам. Во-первых, это может понадобиться как часть процедуры описания поля в соответствии с приложением В, где рекомендуется, чтобы диаграмма направленности была известна на соответствующей частоте акустического воздействия. Во-вторых, диаграмму направленности используют при определении эффективного радиуса гидрофона.
5.1.5 Эффективный радиус гидрофона
Должен быть известен эффективный радиус гидрофона, определение которого следует выполнять методом, изложенным в IEC 62127-3.
5.1.6 Выбор размеров активного элемента гидрофона
5.1.6.1 Общие положения
При выборе эффективного радиуса гидрофона для конкретных задач необходимо учитывать следующее.
В идеале радиус элемента должен быть сравним или быть меньше четверти длины акустической волны так, чтобы изменения амплитуды или фазы не оказывали существенного влияния на неопределенность результата измерения.
Из-за большого числа типов ультразвуковых преобразователей невозможно установить простое соотношение между оптимальным значением эффективного размера гидрофона и такими параметрами, как размеры ультразвукового преобразователя, длина акустической волны и расстояние от ультразвукового преобразователя. Тем не менее в условиях дальнего поля возможно ослабить указанный выше критерий. При определении максимального радиуса активного элемента гидрофона, пригодного для измерения параметров круглых ультразвуковых преобразователей, допускается использовать следующий критерий [4], [5]:
![]() , (5)
, (5)
где - эффективный радиус ультразвукового преобразователя;
l - расстояние между гидрофоном и излучающей поверхностью ультразвукового преобразователя;
- длина акустической волны, соответствующая частоте акустического воздействия.
Это выражение может быть использовано и для фокусируемых ультразвуковых преобразователей.
Для ультразвуковых преобразователей с некруглыми активными элементами выражение (5) может быть использовано, если заменить значением половины максимального размера ультразвукового преобразователя или группы элементов ультразвукового преобразователя.
Требования к размеру активного элемента гидрофона при измерении параметров ультразвукового поля, генерируемого аппаратами для ультразвуковой терапии, могут быть снижены (см. 8.3.1).
Результаты экспериментальных исследований представлены в [1].
5.1.6.2 Эффект пространственного усреднения
Реальные требования к обеспечению необходимого отношения сигнал/шум или другие требования могут вынудить использовать гидрофон с размерами активного элемента, большими по сравнению с рекомендуемыми выше. В этом случае следует с осторожностью подходить к интерпретации результатов измерений, так как пьезоэлектрический гидрофон - это фазочувствительный приемник, который интегрирует комплексное акустическое давление в пределах своего активного элемента.
При необходимости следует выполнить пространственное усреднение по процедуре, описанной в приложение Е.
Если гидрофон переместить из точки, соответствующей максимальному значению принимаемого сигнала, на расстояние, равное эффективному радиусу гидрофона, в направлении, перпендикулярном к оси пучка, то уменьшение сигнала не должно превышать 1 дБ. Если это требование не выполняется, то необходимо ввести поправку на пространственное усреднение (см. приложение Е). Более точные поправки допускается вводить, если учтены дифракционные эффекты [4]-[7].
5.1.7 Ширина полосы
5.1.7.1 Узкополосное приближение
Узкополосные приближения следует рассматривать как допустимые каждый раз, когда параметр нелинейности распространения меньше 0,5 (см. 7.2.4).
В этом случае значение чувствительности на частоте акустического воздействия представляет значения чувствительности на всех интересующих частотах.
Примечания
1 При измерениях узкополосных акустических сигналов предполагается, что все существенные частотные составляющие сигнала проявляются на частотах, близких к частоте акустического воздействия. В этом случае будут происходить лишь небольшие изменения чувствительности гидрофона на конце кабеля под нагрузкой.
2 Приведенное выше упрощенное предположение может быть использовано и при измерении акустических полей с далеко отстоящими друг от друга частотными составляющими при условии, что чувствительность гидрофона на конце кабеля под нагрузкой лишь незначительно изменяется в частотном диапазоне, требуемом для точного представления акустического сигнала.
Если значение параметра нелинейности распространения превышает 0,5 (см. 7.2.4), тогда чувствительность гидрофона (или гидрофона с предусилителем) на конце кабеля под нагрузкой не должна изменяться более чем на ±3 дБ в диапазоне частот (f) от одной октавы ниже до не менее чем на три октавы выше частоты акустического воздействия или до 40 МГц, причем опорное значение 0 дБ соответствует частоте акустического воздействия . Таким образом, для частот
![]() (6)
(6)
уровень чувствительности ![]() должен быть в пределах
должен быть в пределах
![]() , (7)
, (7)
где ![]() и
и =1 В/Па.
Примечание - Имеется научное обоснование для установления верхней границы частот (). Другой предел (40 МГц) выбран потому, что 40 МГц - предельная частота при калибровке гидрофонов по IEC 62127-2. По возможности следует выполнять рекомендации, выработанные в [6], [7], в соответствии с которыми
![]() , т.e. частотный диапазон простирается от четырех октав ниже
, т.e. частотный диапазон простирается от четырех октав ниже и до трех октав выше
. См. также [8], [9] и приложение А.
Если узкополосные приближения неоправданны, то следует выполнить измерения в широкой полосе частот в соответствии с 5.1.7.2.
5.1.7.2 Измерения в широкой полосе частот
В тех случаях, когда узкополосные приближения недопустимы, а неопределенность результатов измерений становится неприемлемо большой из-за ограниченности частотного диапазона гидрофона, рекомендуется вводить поправки на частотную зависимость чувствительности гидрофона и наличие частотных составляющих в волновой форме ультразвукового импульса. При выполнении требований к методу обратной свертки применение методов, описанных в приложении В, может привести к более точным результатам.
5.1.8 Линейность
Линейность преобразования гидрофоном акустического сигнала рекомендуется соблюдать до 5 МПа.
Должен быть указан верхний предел динамического диапазона (особенно если он ниже 5 МПа).
5.1.9 Усилитель сигнала гидрофона
Характеристики гидрофонных усилителей должны удовлетворять следующим требованиям.
Для всех усилителей:
Коэффициент усиления гидрофона с предусилителем должен обеспечивать выполнение требований 5.1.7.
Общая чувствительность гидрофона с предусилителем в пределах установленной полосы частот не должна изменяться более чем на ±0,5 дБ на любом частотном отрезке шириной 100 кГц.
Отклонения от линейности отклика на входной сигнал в динамическом диапазоне 50 дБ не должны превышать ±0,3 дБ.
Измеряемый спектр шума, генерируемый гидрофоном с предусилителем, должен быть существенно низок, чтобы обеспечить требуемое при измерениях отношение сигнал/шум на любой частоте в рассматриваемом диапазоне частот.
Должны быть указаны следующие функциональные параметры:
- частотная зависимость коэффициента усиления;
- частотная зависимость входного импеданса в виде реальной и мнимой частей (см. 3.20) или резистивной и емкостной составляющих;
- выходной импеданс.
Дополнительные требования к дифференциальным усилителям:
Импеданс таких усилителей должен удовлетворять изложенным выше требованиям, за исключением того, что импеданс измеряют между двумя активными входами.
В частотном диапазоне от одной октавы ниже и до двух октав выше ослабление входного сигнала должно быть не менее 40 дБ.
5.1.10 Длина кабеля гидрофона и усилители
Соединительный кабель следует выбирать такой длины и с таким волновым сопротивлением, чтобы его электрический резонанс не влиял на ширину полосы гидрофона или гидрофона с предусилителем. Кабель должен иметь также соответствующий выходной разъем.
Для уменьшения влияния резонанса в соединительном кабеле его длина, м, должна быть не более чем 50/(+
![]() ), где
), где - частота акустического воздействия, МГц;
![]() - ширина полосы сигнала гидрофона на уровне минус 20 дБ, МГц. В большинстве случаев подходит кабель длиной
- ширина полосы сигнала гидрофона на уровне минус 20 дБ, МГц. В большинстве случаев подходит кабель длиной 15 см [12].
Примечания
1 Рекомендуется обращать внимание на согласование выходного импеданса гидрофона с предусилителем и входного импеданса подсоединенного измерительного устройства.
2 Методы, которые могут быть использованы для введения поправок из-за влияния конечной ширины полосы гидрофона с предусилителем на волновую форму, искаженную из-за эффектов нелинейного распространения, представлены в приложении D.
5.2 Требования к системам позиционирования и измерительному баку с водой
5.2.1 Общие положения
Существует множество различных систем, которые могут быть использованы для установки гидрофона и испытуемого ультразвукового преобразователя. Ниже перечислены общие требования к оптимальным характеристикам этих систем, применимых для целей настоящего стандарта. Допускается применять и другие системы позиционирования с эквивалентными характеристиками. В приложении J рассмотрена простая конфигурация измерительного бака с размещенным в нем гидрофоном и ультразвуковым преобразователем, на которой показаны оси координат и степени свободы, соответствующие требованиям настоящего стандарта.
5.2.2 Системы позиционирования
5.2.2.1 Позиционирование ультразвукового преобразователя
Испытуемый ультразвуковой преобразователь должен быть установлен в системе позиционирования таким образом, чтобы его излучающая поверхность была полностью погружена в воду, и на таком расстоянии от ближайшей поверхности, например поверхности воды, чтобы отраженный от нее сигнал не интерферировал с основным сигналом, принимаемым гидрофоном. В этом случае должно быть соблюдено следующее условие.
Если z - расстояние между активным элементом гидрофона и излучающей поверхностью ультразвукового преобразователя, a t - отрезок времени между приходом прямого импульсного сигнала на гидрофон и окончанием периода измерения сигнала с гидрофона, то минимальное расстояние h между осью ультразвукового пучка и отражающей поверхностью следует определять из выражения:
![]() . (8)
. (8)
Представляется предпочтительным погружать ультразвуковой преобразователь в воду и не использовать мембрану между его излучающей поверхностью и водой. Если, однако, мембрана необходима, то она должна быть тонкой, насколько это осуществимо, и расположенной по возможности наиболее близко к излучающей поверхности ультразвукового преобразователя. При этом рекомендуется использовать связующий гель на водной основе и принять меры, чтобы в нем не было пузырьков воздуха. В результаты измерений должны быть внесены поправки на потери акустического сигнала в мембране, если они окажутся существенными.
5.2.2.2 Позиционирование гидрофона
Гидрофон должен быть установлен в координатной системе позиционирования таким образом, чтобы направление максимальной чувствительности гидрофона было приблизительно параллельным ожидаемому направлению оси пучка испытуемого ультразвукового преобразователя.
Примечание - Для устранения влияния отражений ультразвука от поверхности мембранного гидрофона на результаты измерений полей непрерывной волны гидрофон может быть немного наклонен. Такой наклон обеспечит отсутствие значимой интерференции прямого сигнала от преобразователя с отраженным сигналом от гидрофона и исключит влияние сигнала, отраженного от ультразвукового преобразователя и также вызывающего интерференционные эффекты. Две методики, используемые для определения требуемого поворота (наклона) гидрофона, описаны в приложении В.
5.2.2.3 Пространственное позиционирование
Гидрофон и/или ультразвуковой преобразователь должны быть расположены в системе позиционирования таким образом, чтобы обеспечить их перемещение относительно друг друга и установку в заданную точку пространства измерительного бака с соблюдением следующих требований:
a) предусмотреть возможность перемещения вдоль трех ортогональных осей (x, у, z), одна из которых (называемая осью z) должна совпадать с осью активного элемента ультразвукового преобразователя;
b) предусмотреть возможность воспроизведения положения гидрофона или преобразователя, их перемещений и поворотов, что рекомендуется реализовывать с помощью индикаторов перемещений и поворотов;
c) погрешность установки гидрофона или преобразователя в заданную точку не должна превышать меньшего из значений: 0,10, или 0,05 мм.
Примечания
1 После юстировки ось z должна быть параллельна оси пучка ультразвукового преобразователя.
2 Для некоторых измерений допускается снизить требования к точности позиционирования. Разумным основанием для этого может быть соотношение между точностью позиционирования и диаметром активного элемента гидрофона. Так, в направлении, перпендикулярном к направлению распространения ультразвука, достаточно точности, соответствующей 10% диаметра активного элемента гидрофона, а в направлении, параллельном направлению распространения ультразвука, точность позиционирования может быть равной диаметру активного элемента гидрофона.
5.2.3 Бак с водой
5.2.3.1 Общие положения
Размеры измерительного бака должны быть такими, чтобы ультразвуковой преобразователь и гидрофон можно было перемещать относительно друг друга на такое расстояние, которое бы обеспечило установку активного элемента гидрофона в любую точку акустического поля, в которой требуется провести измерения.
Должны быть предусмотрены способы минимизации влияния эффекта отражений ото дна и стенок бака, а также от других отражающих поверхностей внутри бака (см. также 5.2.3.2).
В направлении, параллельном оси пучка для систем неавтоматического сканирования или оси симметрии азимутальной плоскости для систем автоматического сканирования, стенка измерительного бака должна быть расположена на расстоянии от ультразвукового преобразователя, существенно (на 30-100%) превышающем максимальное расстояние между ультразвуковым преобразователем и гидрофоном.
В направлении, перпендикулярном к оси пучка для систем неавтоматического сканирования или оси симметрии азимутальной плоскости для систем автоматического сканирования, стенка измерительного бака должна быть расположена на расстоянии, существенно (на 30-100%) превышающем максимальное удаление гидрофона от оси пучка для систем неавтоматического сканирования или от крайней линии сканирования для систем автоматического сканирования.
Примечания
1 Должны быть приняты во внимание и размеры гидрофона; для мембранных гидрофонов может оказаться существенным внешний диаметр гидрофона в направлении, перпендикулярном к оси пучка.
2 Указанные выше критерии для выбора размеров измерительного бака справедливы для импульсов длительностью менее 10 мкс. Для импульсов большей длительности см. 5.2.2.1 и [13].
5.2.3.2 Поглощающее покрытие
Измерения рекомендуется проводить в условиях, аппроксимирующих свободное акустическое поле. Для ультразвуковых преобразователей, генерирующих непрерывную волну, акустические поглотители рекомендуется устанавливать таким образом, чтобы они улавливали по возможности существенную часть ультразвукового излучения, попадающего на стенки измерительного бака. Для ультразвуковых преобразователей с импульсным излучением и в том случае, когда для выделения прямого сигнала, принимаемого гидрофоном, применяют технику стробирования, использование акустических поглотителей необязательно. Тем не менее и в этом случае целесообразно устанавливать акустические поглотители на ту стенку измерительного бака, которая принимает основную часть излучения ультразвукового преобразователя.
Для оценки необходимости установки акустических поглотителей рекомендуется выполнить приведенную ниже процедуру. При этом критерием необходимости применения акустических поглотителей принимают однородное повышение уровня шумов в сигнале с гидрофона или появление ложных сигналов вблизи от основного сигнала, принимаемого гидрофоном.
Для проверки наличия ложных сигналов перемещают ультразвуковой преобразователь относительно измерительного бака и гидрофона вдоль оси z [см. рисунок J.1 (приложение J)] и наблюдают по осциллографу за изменением сигнала на гидрофоне. Некоторые из ложных сигналов будут перемещаться по экрану осциллографа по крайней мере вдвое быстрее, чем основной сигнал, принимаемый гидрофоном, а другие не попадут во временное окно строба, соответствующее расстоянию между ультразвуковым преобразователем и гидрофоном. Такая проверка возможна только для систем с импульсным излучением.
При непрерывно-волновом излучении следует наблюдать за фазовыми изменениями и искажениями основного сигнала с гидрофона при перемещении ультразвукового преобразователя. Во многих случаях можно наблюдать частичное образование стоячих волн.
Условия свободного поля будут соблюдены в существенной мере, если уровень отраженных от поглощающего слоя сигналов будет снижен более чем на 25 дБ. Для проверки этого требования могут быть применены различные методы. Один из них рассмотрен в приложении В.
5.2.3.3 Качество воды
При измерениях параметров полей с высокими значениями акустического давления или характеризующихся непрерывным излучением высокой мощности возможен значительный эффект кавитации. В этом случае рекомендуется использовать дегазированную воду (см. приложение G).
Во всяком случае рекомендуется использовать дистиллированную или деионизированную воду, ее температура должна быть известной. При применении однослойных мембранных гидрофонов на основе поливинилиденфторида (ПВДФ) без электрического экрана рекомендуется, чтобы удельная электропроводность воды была менее чем 5 мкСм·см.
5.3 Требования к системам сбора и обработки результатов измерений
Передаточные характеристики системы сбора и обработки результатов измерений должны обеспечивать соответствие требованиям 5.1.6-5.1.9 в комбинации с используемыми гидрофоном, предусилителем и усилителем.
5.4 Рекомендации к испытуемому ультразвуковому оборудованию
Если системы автоматического сканирования имеют режим "замораживания" (остановки сканирования), рекомендуется проводить соответствующие акустические измерения с целью убедиться в том, что между параметрами "замороженного" и сканирующего пучков нет существенных различий.
Примечание - Эта процедура зависит от типа системы сканирования. Кроме того, усредненные во времени параметры невозможно определить для "замороженного" пучка.
Если в системе не предусмотрен выходной разъем электрического сигнала, синхронизированного с излучением ультразвукового преобразователя или группы элементов ультразвукового преобразователя, то допускается применять и другие методы синхронизации сигнала триггера.
Примечание - Такие альтернативные методы предусматривают применение внешнего электромагнитного пробника в виде рамки (антенны) или дополнительного акустического датчика, помещенного в ультразвуковое поле [14]-[16].
Если излучение ультразвукового преобразователя или группы элементов ультразвукового преобразователя не имеет последовательной повторяемости, то такую систему будет невозможно синхронизировать методом, описанным в настоящем стандарте. Дополнительные методы измерений, в наибольшей степени соответствующие требованиям акустической безопасности, приведены в приложении F и могут быть использованы, если синхронизация невыполнима.
Рекомендуется выключить системы, управляющие уровнем акустического выхода ультразвукового преобразователя посредством изменения акустического импеданса. При невозможности такого отключения следует принять в расчет дополнительную погрешность измерения.
6 Проведение измерений
6.1 Общие положения
Описанные в настоящем разделе и разделе 7 процедуры применимы для описания ультразвуковых полей с использованием гидрофонов пьезоэлектрического типа. Могут быть использованы и другие процедуры измерений, базирующиеся на использовании пьезоэлектрических гидрофонов, обеспечивающие результаты, эквивалентные тем, что изложены в настоящем разделе.
6.2 Подготовка к измерениям и юстировка ультразвукового преобразователя и гидрофона
6.2.1 Подготовка
Может возникнуть необходимость герметизации ультразвукового преобразователя для предотвращения проникновения в него воды, особенно через кабельный ввод, если преобразователь погружают в воду полностью. Герметизацию рекомендуется проводить в соответствии с указаниями изготовителя испытуемого прибора.
Перед измерениями гидрофон и ультразвуковой преобразователь должны быть осмотрены, чтобы выявить наличие на них загрязнений. При наличии загрязнений поверхности приборов должны быть очищены в соответствии с указаниями изготовителей. Для правильного использования гидрофона и ультразвукового преобразователя рекомендуется выполнять и конкретные меры предосторожности, которые указывает изготовитель или которые сочтет необходимыми пользователь (оператор, испытатель), например, предварительное погружение в воду гидрофона на определенное время.
После погружения в воду гидрофона и ультразвукового преобразователя необходимо убедиться в том, что на их активных поверхностях отсутствуют пузырьки воздуха. Контроль за отсутствием пузырьков воздуха проводят и в процессе всех измерений.
6.2.2 Юстировка ультразвукового преобразователя и гидрофона
Гидрофон необходимо сориентировать таким образом, чтобы ось z, соответствующая направлению его максимальной чувствительности, была параллельной направлению распространения ультразвуковой волны. Необходимая процедура юстировки изложена в IEC 61828.
6.3 Измерения
Измерения следует проводить с соответствующим гидрофоном с предусилителем. В заданной точке ультразвукового поля исследуют акустический сигнал в течение относительно большого отрезка времени, чтобы получить достаточно представительную часть этого сигнала. Обычно для этого требуется менее 1 с.
Необходимо убедиться в том, что ширина полосы, частота выборки и/или временное разрешение системы сбора данных достаточны для точного представления сигнала гидрофона.
Примечания
1 В настоящее время доступны новые высокотехнологичные цифровые осциллографы, обеспечивающие сбор и анализ большого объема данных. В общем случае использование таких приборов представляется предпочтительным, потому что с их помощью могут быть реализованы более перспективные методы определения всех необходимых параметров.
2 Если акустический сигнал не повторяется и эквивалентная времени выборка невозможна, то для точного представления сигнала гидрофона необходима оцифрованная ширина полосы для одиночного импульса.
6.4 Анализ
6.4.1 Поправки на ограничение ширины полосы и на пространственное усреднение
Если на результаты измерений оказывают влияние ограниченная ширина полосы (см. 5.1.7) и резонансы (см. 5.1.10), то необходимо вводить поправки. При применении метода обратной свертки процедуры, приведенные в приложении D, могут обеспечить более точные результаты.
Поправки вводят и в том случае, когда на результаты измерений влияют эффекты пространственного усреднения, указанные в 5.1.6.2. Такие поправки вводят методом, описанным в приложении Е.
6.4.2 Неопределенности
При оценке и выражении неопределенности калибровки необходимо следовать ISO GUM. Более детальные указания по оценке неопределенности приведены в приложении I.
7 Описание пучка
7.1 Общие положения
Таблица 1 дает представление об акустических параметрах, которые могут быть использованы для описания параметров акустического выхода ультразвукового медицинского оборудования различных типов. В 7.2.2 и 7.2.3 приведены указания по измерению первичных параметров давления. Некоторые из параметров импульса схематично показаны на рисунке 2.
Таблица 1 - Акустические параметры, соответствующие различным типам ультразвукового медицинского оборудования
Тип оборудования | Первичные параметры акустического давления | Вычисляемые параметры интенсивности | Другие параметры |
Эхо-импульсное: | |||
- статическое | 1, 2 | 4-6 | 7, 8, 10-16, 18-20 |
- автоматического сканирования | 1, 2 | 4-6 | 7, 8, 10-20 |
Доплеровское: | |||
- сосудистое | 1*, 2 | 4-6 | 7, 10, 11, 14, 18, 19 |
- сердцебиения плода | 1*, 2 | 4-6 | 7, 10, 11, 14, 18, 19 |
- импульсное | 1, 2 | 4-6 | 7, 8, 10-16, 18-20 |
Физиотерапевтическое: | |||
- непрерывной волны | 1*, 2, 3 | 5, 6 | 7, 9, 12, 14, 18, 19 |
- тональных импульсов | 1*, 2, 3 | 4-6 | 7, 9, 12, 14-16, 18, 19 |
* Для этих применений пиковое акустическое давление сжатия предполагается равным модулю пикового акустического давления разрежения. | |||
Примечание - В таблице 1 обозначены цифрами:
1 - пиковое акустическое давление сжатия (см. 3.45);
2 - пиковое акустическое давление разрежения (см. 3.44);
3 - эффективное акустическое давление (см. 3.53);
4 - пространственный пик усредненной по импульсу интенсивности (см. 3.60);
5 - пространственный пик усредненной во времени интенсивности (см. 3.62);
6 - усредненная по пространству и времени интенсивность (см. 3.59);
7 - вычисляемая ультразвуковая мощность по 7.2.7 (или измеренная по [71]) (см. дополнение к библиографии);
8 - ширина пучка (см. 3.11);
9 - площадь пучка на уровне минус 20 дБ (см. 3.7);
10 - площадь пучка на уровне минус 6 дБ (см. 3.7);
11 - размеры на выходе пучка на уровне минус 12 дБ (см. 3.41);
12 - параметр нелинейности распространения (см. 3.38);
13 - волновая форма акустического импульса (см. 3.1);
14 - местоположение точки, в которой был измерен соответствующий параметр (см. 3.15);
15 - длительность импульса (см. 3.48);
16 - частота повторения импульсов (см. 3.52);
17 - частота повторения сканирования (см. 3.58);
18 - частота акустического воздействия (см. 3.3);
19 - группа элементов ультразвукового преобразователя (см. 3.75);
20 - размеры группы элементов ультразвукового преобразователя (см. 3.76).
x - время; у - давление; - время достижения 10% значения ppsi;
- время достижения 10% значения ppsi
Рисунок 2 - Определение длительности импульса
7.2 Первичные параметры давления
7.2.1 Общие положения
Перечисленные ниже акустические параметры могут быть определены при установке ультразвукового преобразователя и гидрофона в соответствии с 5.2.2, 5.2.3 и 7.1:
- ширина пучка на уровне минус 6 дБ;
- ширина пучка на уровне минус 12 дБ;
- площадь пучка на уровне минус 6 дБ;
- площадь пучка на уровне минус 20 дБ;
- размеры на выходе пучка;
- площадь сканирования;
- местоположение точки пространственного пика временного пика акустического давления;
- местоположение точки максимального значения интеграла квадратов давления в импульсе;
- местоположение точки пространственного пика усредненной по времени интенсивности;
- разделение линий ультразвукового сканирования;
- размеры группы элементов ультразвукового преобразователя;
- частота повторения импульсов;
- частота повторения сканирования;
- длительность импульса;
- среднеарифметическая частота акустического воздействия;
- волновая форма акустического импульса;
- параметр нелинейности распространения;
- пиковое акустическое давление сжатия;
- пиковое акустическое давление разрежения;
- пространственный пик эффективного акустического давления.
Примечание - В [17] среднеарифметическая частота акустического воздействия эквивалента центральной частоте.
Выбор этих параметров зависит от характеристик измеряемого поля. Если измерения выполняют в заданной плоскости, то должно быть обусловлено ее положение относительно поверхности ультразвукового преобразователя и указано, что полученные параметры относятся только к этой области.
7.2.2 Пиковые акустические давления сжатия и разрежения
Для определения местонахождения точки или точек, соответствующих пиковым акустическим давлениям сжатия и разрежения, должны быть проведены тщательные исследования.
Примечание - Особо следует отметить точки на оси пучка, в которых наблюдаются максимальные или минимальные значения этих параметров.
7.2.3 Пространственный пик эффективного акустического давления
Для нахождения точки пространственного пика эффективного акустического давления должны быть проведены детальные исследования.
Примечание - Особо следует отметить точки на оси пучка, в которых наблюдаются максимальные или минимальные значения этого параметра.
Измерения проводят по всем периодам акустического повторения за время, пока ультразвуковой сигнал воздействует на гидрофон.
При определении эффективного акустического давления за период повторения сканирования в системах автоматического сканирования важно измерять принимаемый гидрофоном сигнал по всем следующим друг за другом линиям ультразвукового сканирования. Это соответствует излучениям поочередно от каждой из групп элементов ультразвукового преобразователя для многоэлементных ультразвуковых преобразователей или ротационному перемещению линии ультразвукового сканирования для секторных сканеров или сканеров с фазированной решеткой.
Однако в большинстве случаев при испытаниях ультразвукового оборудования, излучающего короткие импульсы, более удобно определять не среднеквадратичное акустическое давление, а интеграл квадратов давления в импульсе (см. 7.2.5).
Примечание - Для получения максимального сигнала на гидрофоне при сканировании им поля может потребоваться ориентировать его постепенными поворотами вокруг оси, перпендикулярной к азимутальной плоскости.
7.2.4 Параметр нелинейности распространения
Распространение ультразвука в воде при акустических давлениях и частотах, широко используемых в медицинских ультразвуковых полях представляет собой нелинейный процесс, в результате чего искажается волновая форма акустического импульса. При наличии эффекта дифракции разница между пиковыми акустическими давлениями сжатия и разрежения увеличивается. Существенность влияния искажений при описании ультразвуковых полей может быть оценена по степени нелинейности распространения, которая может быть определена путем вычисления параметра нелинейности распространения (см. 3.38) [2].
Могут быть определены следующие режимы:
a) <0,5, когда имеются лишь малые нелинейные искажения. Амплитуда на частоте акустического воздействия отличается от амплитуды при отсутствии нелинейных эффектов не более чем на 5%;
b) 0,5![]() 1,5, когда имеются видимые искажения. Рекомендуется использовать широкополосный гидрофон, изменения чувствительности которого не превышают требований 5.1.7.1. Значение амплитуды сигнала в полуоктавной полосе с центром на частоте акустического воздействия будет отличаться от ее значения в отсутствие нелинейных эффектов на 5-25%;
1,5, когда имеются видимые искажения. Рекомендуется использовать широкополосный гидрофон, изменения чувствительности которого не превышают требований 5.1.7.1. Значение амплитуды сигнала в полуоктавной полосе с центром на частоте акустического воздействия будет отличаться от ее значения в отсутствие нелинейных эффектов на 5-25%;
c) >1,5, когда наблюдаются значительные нелинейные искажения, а также затухание на частоте акустического воздействия. Здесь, как и в b), необходимо применять широкополосный гидрофон. Значение амплитуды в полуоктавной полосе с центром на частоте акустического воздействия будет отличаться от ее значения в отсутствие нелинейных эффектов более чем на 25%.
Примечания
1 В случаях b) и с) верхняя граница полосы частот нередко превышает 15 МГц.
2 Параметр нелинейности распространения - это наиболее реальный параметр для количественных вычислений нелинейных искажений [2].
7.2.5 Параметры интенсивности, при расчетах которых используют мгновенное акустическое давление
Так как гидрофонами измеряют акустическое давление, то и набор величин, базирующихся на этих измерениях, приводят в терминах акустического давления. Именно поэтому при описании полей наиболее предпочтительны параметры, приведенные в 7.2 и в разделе 3.
Параметры мгновенного акустического давления возможно точно преобразовать в интенсивность лишь в корректном предположении плосковолнового распространения. Именно поэтому при пользовании параметрами интенсивности должно быть четко указано, что подразумевается аппроксимация плоской бегущей волны.
В этом предположении мгновенную интенсивность выражают как:
![]() , (9)
, (9)
где - плотность воды;
с - скорость звука в воде (см. приложение В).
Непосредственно из параметров давления могут быть рассчитаны следующие параметры интенсивности:
- пространственный пик пик-временной интенсивности
![]() , (10)
, (10)
- пространственный пик усредненной по времени интенсивности
![]() , (11)
, (11)
- усредненная по пространству и импульсу интенсивность ,
- усредненная по пространству и времени интенсивность .
Процедуры, используемые для определения последних двух параметров, должны быть одинаковыми с теми, которые описывают эквивалентные им параметры акустического давления. Однако в этом случае параметр, записываемый для каждой точки акустического поля, будет представлять собой квадрат мгновенного акустического давления.
Примечание - Если параметр нелинейности распространения превышает 0,5, то переход от параметров давления к параметрам интенсивности может быть некорректным или существенно неточным [18].
7.2.6 Параметры интенсивности, при расчетах которых используют интеграл квадратов давления в импульсе
7.2.6.1 Длительность импульса
Длительность импульса равна 1,25 части времени, за которое интеграл по времени от квадратов мгновенного акустического давления увеличивается с 10 до 90% интеграла квадратов давления в импульсе. Моменты времени и
, в которые интеграл достигает значений 10 и 90%, рассчитывают из:
 (12)
(12)
и
 , (13)
, (13)
где M - чувствительность гидрофона;
U(t) - измеряемое напряжение на выходе гидрофона.
Длительность импульса вычисляют как:
![]() . (14)
. (14)
7.2.6.2 Пространственный пик усредненной по импульсу интенсивности
Пространственный пик усредненной по импульсу интенсивности вычисляют по максимальному значению интеграла квадратов давления в импульсе, измеренного на оси пучка, как:
![]() , (15)
, (15)
где - плотность воды;
с - скорость звука в воде (см. приложение В);
- удельный акустический импеданс дистиллированной воды (=1,48·10
кг·м
с
при 20°С);
- длительность импульса.
7.2.6.3 Пространственный пик усредненной по времени интенсивности
Для несканирующего режима пространственный пик усредненной по времени интенсивности вычисляют из значения интеграла квадратов давления в импульсе одиночного пучка как:
![]() , (16)
, (16)
где prr - максимальное значение частоты повторения импульсов в несканирующем режиме.
При сканировании (например, в режиме В) значение следует измерять, учитывая вклад перекрытия линий ультразвукового сканирования. Это означает, что интеграл квадратов давления в импульсе определяют суммой:
![]() , (17)
, (17)
где - интеграл квадратов давления в импульсе по центральной линии сканирования;
![]() ,
, ![]() и т.д. - постепенно уменьшающиеся значения интеграла квадратов давления в импульсе для следующих друг за другом смежных линий сканирования.
и т.д. - постепенно уменьшающиеся значения интеграла квадратов давления в импульсе для следующих друг за другом смежных линий сканирования.
По частоте повторения сканирования и числу линий ультразвукового сканирования вычисляют значение разделения линий ультразвукового сканирования на глубине, при которой будет определено максимальное значение . Значение разделения линий ультразвукового сканирования может быть найдено и иным способом - при перемещении гидрофона в направлении сканирования и измерении расстояния между точками, соответствующими максимальным значениям сигнала на его выходе.
Вклад от перекрытия смежных линий сканирования вычисляют, используя полученное значение разделения линий ультразвукового сканирования и результаты поперечного сканирования. При суммировании значений ppsi должны быть учтены вклады всех линий ультразвукового сканирования за существенно большой период времени, обеспечивающий получение всей значимой акустической информации.
По значению пространственного пика усредненной по времени интенсивности для несканирующего режима получают соответствующее значение для режима автоматического сканирования из следующего выражения:
![]() , (18)
, (18)
где srr - максимальное значение частоты повторения сканирования в режиме сканирования.
7.2.7 Вычисление мощности ультразвука
Если полную ультразвуковую мощность Р одиночного стационарного пучка определяют по результатам его плоского сканирования, то это должно быть выполнено с помощью калиброванного гидрофона в соответствии с IEC 62127-2 на основании следующего выражения:
![]() , (19)
, (19)
где ![]() - усредненная по времени интенсивность в точке, определяемой ортогональными координатами х и у.
- усредненная по времени интенсивность в точке, определяемой ортогональными координатами х и у.
Энергию Е пучка вычисляют как сумму всех значений ppsi(x,y) по всем точкам площади сканирования:
![]() , (20)
, (20)
где dS - площадь одного шага, т.е. произведение dx на dy, между двумя следующими друг за другом точками измерений на площади сканирования в предположении, что dx и dy постоянны на всей площади сканирования и что площадь сканирования имеет прямоугольную геометрию. Затем определяют полную ультразвуковую мощность из выражения:
![]() . (21)
. (21)
Полная ультразвуковая мощность может быть также определена из выражения:
![]() . (22)
. (22)
В режимах сканирования полная ультразвуковая мощность для каждого режима работы может быть определена из выражения:
![]() , (23)
, (23)
где Е - энергия пучка, вычисленная по формуле (20);
М - число линий ультразвукового сканирования, необходимых для создания одного кадра изображения;
n - число возбуждений каждой линии сканирования.
Полная ультразвуковая мощность во время сканирования - это сумма всех значений ультразвуковой мощности в рабочих режимах.
Примечание - Этот метод особенно полезен в тех случаях, когда чувствительность коммерчески доступных измерителей мощности (радиометров) недостаточна или когда физические размеры ультразвукового преобразователя не позволяют использовать эти приборы. Как правило, измерения полной ультразвуковой мощности методом радиометра более точны, чем приведенные выше вычисления (см. [71] в дополнении к библиографии).
8 Требования к измерениям конкретных ультразвуковых полей
8.1 Общие положения
Указанные в этом подразделе требования или дополняют, или заменяют требования, рассмотренные в разделе 5 (см. также приложение Н).
8.2 Диагностические поля
8.2.1 Упрощенные процедуры и рекомендации
8.2.1.1 Процедуры
Измерения интеграла квадратов давления в импульсе необходимы для определения многих параметров ультразвукового поля. В тех случаях, когда волновая форма акустического импульса не изменяет своих очертаний в пределах определенной измерительной плоскости, перпендикулярной к оси пучка, вместо интеграла квадратов давлений в импульсе допускается использовать пиковое акустическое давление, что следуют из определения площади пучка.
Примечание - Как правило, такие ситуации возникают в ультразвуковых полях непрерывной волны, используемых, например, в доплеровских приборах непрерывной волны или в аппаратах для физиотерапии.
Если предполагается, что всем линиям акустического сканирования соответствуют сигналы равной амплитуды и с одинаковым профилем пучка, то вклад перекрытия линий сканирования может быть определен по профилю пучка и известному расстоянию между линиями сканирования в измерительной плоскости.
При этом рекомендуется для нахождения местоположения линии с наибольшим значением пикового акустического давления исследовать все линии акустического сканирования.
Примечание - На практике различия в акустической мощности излучения на разных линиях сканирования будут зависеть от типа сканера. Для датчиков секторного сканирования с вращающимся одиночным элементом и неизменным каналом акустической связи это различие будет малым. В данном случае можно проводить исследование по центральной и двум крайним линиям сканирования и затем оценивать необходимость продолжения исследований по другим линиям сканирования. Если различие не превышает 10%, то в исследованиях по другим линиям сканирования нет необходимости.
8.2.2 Импульсно-волновое диагностическое оборудование
8.2.2.1 Общие положения о диагностических полях
Следует использовать гидрофон с активным элементом диаметром 0,5 мм или менее.
Точность установки гидрофона (или преобразователя, если сканирование проводят путем его перемещения) в заданную точку по трем ортогональным координатам должна быть не хуже ±0,1 мм.
Для сигналов с волновой формой, искажаемой из-за эффектов нелинейного распространения, т.е. в том случае, когда параметр нелинейности распространения (см. 3.38) превышает 0,5, необходимо либо выбирать гидрофон с соответствующей шириной полосы (см. 5.1.7), либо вводить поправки (см. приложение D), либо принимать в расчеты дополнительную неопределенность результатов измерений.
Для таких измерений более подходят мембранные или зондовые гидрофоны на основе пленки ПВДФ (см. раздел В.9 приложения В), чем керамические гидрофоны зондового типа.
Примечания
1 На практике точность и воспроизводимость системы позиционирования наиболее важны в направлении, перпендикулярном к направлению распространения, и в большинстве случаев достаточно, чтобы они не превышали ±0,05 мм. В большинстве измерений по направлению распространения достаточно точности ±0,1 мм. Наивысшая точность требуется при измерении параметров сильно сфокусированных полей (для датчиков с широкой апертурой) и на высоких частотах (см. 5.2.2.3).
2 При измерениях сигналов с искаженной волновой формой предъявляют дополнительные требования к ориентации гидрофона из-за частотной зависимости его диаграммы направленности. При этом важно оптимизировать ориентацию гидрофона, чтобы обеспечить максимальный сигнал на его выходе (см. 5.2.2).
3 В фокальной области, как правило, предполагается квадратичное соотношение между давлением и интенсивностью, что позволяет вычислить параметры интенсивности. Такое предположение оправданно, несмотря на возрастание погрешности, связанной с возможным появлением нелинейных искажений.
8.2.2.2 Диагностические поля при отсутствии синхронизации сканирования
В связи с развитием технологии ультразвуковые поля, генерируемые современными приборами ультразвуковой визуализации, все больше и больше усложняются. Параметры, определенные в разделе 3 для описания пространственных и временных изменений давления и интенсивностей в ультразвуковом поле, могут быть применимы лишь для несканирующих полей, используемых в импульсно-волновых доплеровских приборах и сканерах, работающих в режиме М. Однако эти параметры все труднее и труднее использовать для описания сложных последовательностей импульсов, генерируемых сканерами в таких режимах, как цветовое доплеровское картирование. В некоторых случаях в подобных последовательностях невозможно даже определить такой параметр, как период акустического повторения.
Модифицированный набор акустических параметров, которые лучше подходят для описания полей современных систем визуализации, приведен в приложении F.
8.2.3 Диагностическое оборудование с непрерывно-волновым излучением
Необходимо использовать гидрофон с активным элементом диаметром 0,5 мм или менее.
Точность установки гидрофона (или преобразователя, если сканирование проводят путем его перемещения) в заданную точку по трем ортогональным координатам должна быть не хуже ±0,1 мм.
Для сигналов с волновой формой, не искажаемой из-за эффектов нелинейного распространения, т.е. в том случае, когда параметр нелинейности распространения (см. 3.38) меньше чем 0,5, нет необходимости в использовании широкополосного гидрофона (см. 5.1.7).
Для ультразвуковых полей, в которых местоположение пикового акустического давления находится в непосредственной близости к излучающей поверхности ультразвукового преобразователя, в расчетах интенсивности ультразвука допустимо плосковолновое приближение с учетом соответствующей дополнительной погрешности.
Для измерения полей доплеровских преобразователей непрерывной волны подходят зондовые гидрофоны на основе пьезокерамики или пленки ПВДФ (см. раздел В.9 приложения В). Допускается использовать и мембранные гидрофоны, если принять меры, чтобы исключить интерференцию прямого сигнала от ультразвукового преобразователя и сигнала, отраженного от мембраны гидрофона (см. 5.2.2.2).
8.3 Поля аппаратов физиотерапии
8.3.1 Оборудование для ультразвуковой физиотерапии
Должны быть применены методы и средства, указанные в IEC 61689.
Для сигналов с волновой формой, не искажаемой из-за эффектов нелинейного распространения, т.е. в том случае, когда параметр нелинейности распространения (см. 3.38) меньше чем 0,5, нет необходимости в использовании широкополосного гидрофона.
Для получения абсолютных значений давления или интенсивности следует использовать гидрофон, откалиброванный на частоте акустического воздействия в соответствии с IEC 62127-2.
Для измерения полей, генерируемых аппаратами ультразвуковой терапии, как правило, подходит гидрофон с линейностью (см. 5.1.8) до 1 МПа.
Измерения эффективной площади излучения (см. IEC 61689) следует проводить с помощью зондового гидрофона с активным элементом из пьезокерамики или пленки ПВДФ. При этом следует принять меры для исключения интерференции прямого сигнала с сигналами, отраженными от корпуса зондового гидрофона и его держателя.
Эффекты кавитации, возникающие при давлениях, характерных для излучателей аппаратов для ультразвуковой физиотерапии, могут стать причиной выхода гидрофона из строя. Поэтому измерения давлений выше 0,3 МПа следует проводить в дегазированной воде.
Максимальное значение эффективного радиуса гидрофона , используемого при измерениях, должно соответствовать условию:
![]() , (24)
, (24)
где - длина звуковой волны, соответствующая частоте акустического воздействия.
Примечания
1 В большинстве случае при испытаниях аппаратов для физиотерапии указанный выше критерий представляет максимальное значение эффективного радиуса гидрофона, существенно большее, чем это рекомендовано в 5.1.6. Это обосновано анализом влияния радиуса на результаты измерения, прежде всего эффективной площади излучения, а не пиковых значений давления, а она менее чувствительна к эффектам пространственного усреднения. Гидрофоны используют также для измерений отношения неоднородности пучка, критерий (24) применим и в этом случае [19, 20].
2 Для лечебных головок некоторых типов (излучателей аппаратов ультразвуковой терапии) ультразвуковая волна, отраженная назад к головке, может влиять на значение излучаемой ею мощности, что, в частности, наблюдается при когерентных отражениях от поглотителей с плоской гладкой поверхностью. В этих случаях применение поглотителей с текстурированной поверхностью может дать лучшее приближение к условиям свободного поля.
8.3.2 Оборудование для гипертермии
Оборудование для гипертермии использует сфокусированное ультразвуковое излучение высокой интенсивности (High Intensity Focused Ultrasound, HIFU). Конкретные требования к этому оборудованию разрабатывают в рамках отдельного стандарта IEC.
8.4 Поля хирургического применения
8.4.1 Литотриптеры и источники импульсов давления для других лечебных применений
Специальные требования к измерениям полей, генерируемых литотриптерами импульсов давления, изложены в IEC 61846.
Линейность отклика гидрофона (см. 5.1.8) должна быть известна в диапазоне давлений от 80 до 150 МПа. Если имеется какая-то значимая нелинейность, то она должна быть учтена при определении акустических параметров поля литотриптера и связанных с этим погрешностей.
Примечание - Импульсы давления используют не только в литотрипсии, но и для лечения таких болезней, как, например, отложения солей в плечевом суставе, теннисный "локоть", пяточная шпора и т.д., а также для лечения некоторых кардиологических заболеваний.
8.4.2 Низкочастотные хирургические применения
Для описания низкочастотных полей, генерируемых хирургическими аппаратами, используют гидрофоны, которые должны быть калиброваны в соответствии с IEC 60565.
Для оборудования этого типа не применимы требования разделов 5-7. Специальные требования к методам измерения полей, генерируемых низкочастотными хирургическими аппаратами, указаны в IEC 61847.
8.5 Поля для других медицинских применений
К настоящему времени для оборудования этого типа конкретные требования отсутствуют.
9 Установление соответствия
9.1 Общие положения
Должны быть выбраны те акустические параметры, которые определены настоящим стандартом. Для обеспечения прослеживаемости и воспроизводимости параметров оборудования рекомендуется записывать положения органов управления прибора (аппарата), которые могут повлиять на параметры излучаемого поля.
В соответствии с требованиями настоящего стандарта по каждому представляемому параметру должны быть установлены:
a) среднеарифметическое значение, определенное по группе из n номинально идентичных экземпляров систем (приборов, аппаратов), каждый из которых настроен на излучение максимальной мощности;
b) неопределенность результатов измерений.
Неопределенность результатов измерений включает в себя много составляющих (см. приложение I). Она служит оценкой вклада всех неопределенностей, относящихся к измерениям параметров одного экземпляра. Неопределенность результата измерений должна быть представлена как расширенная неопределенность при доверительной вероятности Р=95%. При этом необходимо соблюдать правила учета вклада отдельных составляющих неопределенности, изложенные в ISO/IEC GUM.
9.2 Максимально возможные значения
Требование в формулировке "должен соответствовать" означает, что при сравнении измеренных значений определенных параметров с их допустимыми значениями к результатам измерений следует прибавлять значения неопределенности результата измерений и допуска на разброс параметров систем (приборов, аппаратов) одного и того же типа. Максимально возможные значения следует определять в соответствии со следующими процедурами:
а) требуемый параметр измеряют на группе из n номинально идентичных экземпляров систем (приборов, аппаратов), каждый из которых должен быть настроен на максимальные уровни излучения;
б) вычисляют максимально возможные значения линейным суммированием предельного допуска (половина интервала при доверительной вероятности Р=95% и для 95% выборки) и расширенной неопределенности результата измерений (при доверительной вероятности Р=95%).
Интервал допуска (допустимый разброс параметров однотипной продукции) определяют в соответствии с ISO 16269-6. Более подробные указания по оценке неопределенностей приведены в приложении I.
Примечание - "Интервал допуска" относится к разбросу параметров систем одного типа, а "неопределенность" связана с точностью измерений параметров.
Выполнение всех требований настоящего стандарта не всегда возможно. Если измерения выполняли для того, чтобы определить параметры акустического выхода и внести их значения в документацию, но они были проведены с отклонениями от некоторых требований настоящего стандарта, то такое несоответствие должно быть четко зафиксировано в результатах испытаний. Должно быть указано, к какому разделу или подразделу относятся несоответствия, а также объяснены их причины.
Примечание - Ниже даны отдельные примеры записи о таких несоответствиях:
a) соответствует ГОСТ IEC 62127-1, за исключением 5.1.6; чувствительность гидрофона на 20 МГц была на 60% ниже, чем чувствительность на 5 МГц;
b) соответствует ГОСТ IEC 62127-1, за исключением 5.1.8; изменение коэффициента усиления усилителя в диапазоне от 5 до 20 МГц составляло минус 5 дБ;
c) соответствует ГОСТ IEC 62127-1, за исключением 5.1.5; эффективный радиус гидрофона был равен 0,5 мм.
9.3 Отбор образцов
Система качества производства требует, чтобы испытаниям была подвергнута определенная часть изготавливаемой продукции, а иногда и каждый ее экземпляр. Для оценки разброса параметров систем (приборов, аппаратов) одного типа, если повторные измерения всех параметров отличаются трудоемкостью, значения разброса допускается оценивать по результатам измерений сокращенного числа параметров. Метод такой сокращенной оценки приведен в ISO 16269-6.
Приложение А
(справочное)
Обоснование положений настоящего стандарта
В настоящем приложении дано краткое обоснование наиболее важных требований настоящего стандарта и представлена основополагающая информация для тех, кто хорошо знаком с тематикой стандарта, но не имел возможности участвовать в его разработке. Разъяснение смысла основных требований важно для правильного применения настоящего стандарта. В связи с тем, что медицинское ультразвуковое оборудование продолжает совершенствоваться, представляется, что обоснование современных требований облегчит применение требований настоящего стандарта к новому, еще только разрабатываемому оборудованию и поможет в разработке дополнений к настоящему стандарту.
Нумерация разделов, подразделов и пунктов в настоящем приложении соответствует нумерации в основном тексте настоящего стандарта.
Раздел 3: большинство акустических параметров определены таким образом, который позволяет представить их либо однозначно, либо соотнести с измерениями в какой-то заданной плоскости. Это обеспечивает более гибкий подход к применению стандарта. Например, для преобразователей, применяемых в ультразвуковой физиотерапии, или для преобразователей с широко расходящимся пучком, таких как используемые для мониторинга материнского плода, акустические параметры в плоскости, содержащей максимальное значение пространственного и временного пика акустического давления, могут оказаться неприемлемыми. Однако система определений, принятая в настоящем стандарте, позволяет выбрать измерительную плоскость по другим критериям, отличным от приведенных в настоящем стандарте.
3.25 и 3.26: оба определения чувствительности гидрофона, как подсоединенного к конкретной электрической нагрузке, например к осциллографу, так и при бесконечном импедансе этой нагрузки, соответствуют практике применения гидрофонов.
3.38: при высоких значениях акустического давления, генерируемого ультразвуковым диагностическим оборудованием (пиковое акустическое давление сжатия в диапазоне от 0,1 до 10 МПа), могут наблюдаться ощутимые искажения волновой формы акустического импульса, особенно в фокальной области. Настоящий стандарт, что очень важно, учитывает нелинейные эффекты, связанные с распространением ультразвука в воде. Указанные искажения вызваны тем, что за время акустического цикла часть волны, соответствующая сжатию, движется быстрее, чем часть, соответствующая разрежению, что приводит к прогрессирующему искажению волновой формы. В общем случае степень искажений, существующих в определенной точке акустического поля, растет с увеличением многих факторов: расстояния от преобразователя, частоты акустического воздействия, пикового акустического давления на поверхности ультразвукового преобразователя, параметра нелинейности среды распространения (воды) и степени фокусировки. Настоящим стандартом установлено, что поглощение и рассеяние ультразвука в тканях различных типов в процессе многих медицинских обследований приводит к уменьшению пикового акустического давления, но в некоторых ситуациях это уменьшение будет несущественным. Например, просвечивание через глаз, мочевой пузырь и околоплодные воды - это примеры распространения ультразвука в основном в жидкости. Для того чтобы учесть связанную с этим нелинейность, в список параметров, используемых для описания полей (см. 7.2.1), включен параметр, относящийся к нелинейности. Это параметр нелинейности распространения в виде коэффициента, по которому может быть предсказана значимость нелинейных искажений в фокусе преобразователя [2]. По этому параметру может быть определена требуемая ширина полосы гидрофона и усилителя, а также необходимость введения поправок в результаты измерений пиковых давлений.
3.44 и 3.45: здесь приведены два определения пиковых акустических давлений, так как часто они отличаются друг от друга в три раза. Важно различать их и в связи с тем, что пиковое акустическое давление разрежения (фаза разрежения в цикле) в наибольшей степени определяет акустическую кавитацию.
3.72: это определение приведено для того, чтобы отличить линии ультразвукового сканирования, пересекающие выбранную плоскость в точке, постепенно меняющей свое местоположение в процессе акустического сканирования, от линий, которые ее не пересекают. Последние, например, встречаются при сложных возбуждениях одного и того же ультразвукового преобразователя или одной и той же группы элементов преобразователя для фокусировки на различных глубинах или для уплотнения доплеровских линий в дуплексных сканерах.
5.1.7: широкополосные гидрофоны важно применять при описании временных параметров ультразвуковых полей медицинского назначения, характеризующихся наличием коротких импульсов или существенных нелинейных искажений. Одно из следствий наличия нелинейных искажений - это появление в спектре сигнала высокочастотных составляющих, что требует расширения полосы частот гидрофона в высокочастотную область [8]. В [8] было показано, что для проведения измерений с погрешностью менее 5% требуется ширина полосы (при неравномерности ±3 дБ), верхняя граница которой превышает частоту акустического воздействия не менее чем в восемь раз. Также желательно, чтобы нижняя граница полосы частот гидрофона была существенно ниже
, что, в частности, важно при измерениях пикового акустического давления разрежения
[9]. Необходимость повышения чувствительности гидрофона в низкочастотной области связана с тем, что уменьшение длительности импульса сопровождается расширением его спектра в сторону как высоких, так и низких частот. К тому же асимметрия волновой формы, возникающая из-за совместного воздействия эффектов дифракции на излучателе и нелинейности распространения, вызывает появление низкочастотных составляющих в спектре той части сигнала, которая характеризуется разрежением. Приведенные в [9] результаты моделирования и измерений коротких импульсов гидрофонами с ограниченной шириной полосы показывают, что для снижения погрешности измерения не более 5-10% нижняя граница частотной полосы гидрофона с предусилителем должна быть ниже
по крайней мере на порядок. Поэтому в настоящем стандарте рекомендуется, чтобы границы частотного диапазона системы приема, усиления и записи волновой формы импульса находились в пределах от
/16 до 8
. Однако из практических соображений в определении ширины полосы гидрофона установлены меньшие ограничения: от
/2 до меньшего из значений: 8
и 40 МГц.
Раздел 7: здесь приведено много параметров, определения которых даны в разделе 3 и которые служат основой для описания широкого диапазона ультразвуковых полей, хотя основное внимание уделено медицинскому ультразвуковому оборудованию. Тем не менее для оборудования некоторых конкретных видов, а также для составления этикеток может быть выбрана лишь небольшая часть акустических параметров.
Раздел 9: в этом разделе содержатся необходимые рекомендации к декларированию параметров акустического выхода в кратких технических характеристиках оборудования, хотя это и не представляет собой основную цель настоящего стандарта. Рекомендованы и правила представления результатов измерений, выполненных не в полном соответствии с требованиями настоящего стандарта.
Обсуждение точности измерения акустических параметров представлено в приложении I.
Приложение В
(справочное)
Гидрофоны и система позиционирования
В.1 Общие положения
В настоящее время используют гидрофоны четырех основных типов. В гидрофонах двух типов применяют активный элемент, выполненный или из пьезоэлектрической керамики, или из полимера (как правило, ПВДФ), укрепленный на конце иглоподобной конструкции. Третий тип - это мембранный гидрофон с большой пленкой из ПВДФ, центральная область которой обладает пьезоэлектрической активностью. Четвертый тип - это оптоволоконный гидрофон. Более детальное рассмотрение гидрофонов этих типов приведено в подразделе В.9.
Ни одна из существующих конструкций гидрофонов не удовлетворяет всем требованиям настоящего стандарта в частотном диапазоне от 50 кГц до 40 МГц. Предварительные материалы, посвященные исследованиям характеристик оптоволоконных гидрофонов, показывают, что в перспективе эти гидрофоны могли бы обеспечить выполнение всех требований и исключить необходимость введения поправок на пространственное усреднение [21]-[23]. Вместе с тем важность того или иного требования зависит от конкретного ультразвукового поля, подлежащего описанию. Например, в дальнем поле плоского поршневого ультразвукового преобразователя размер активного элемента гидрофона может быть в два-три раза больше длины акустической волны. Для акустических давлений, меньших 0,1 МПа, широкополосность гидрофона не столь важна, поскольку маловероятно, чтобы на обычно используемых расстояниях нелинейные искажения были бы существенными. Подобным же образом при измерениях в импульсных полях отражения от мембранных гидрофонов не так существенны, как в полях непрерывной волны.
В.2 Электрическая нагрузка
Чувствительность гидрофона на конце кабеля под нагрузкой (см. 5.1.3) рекомендуется определять по чувствительности холостого хода гидрофона на конце кабеля, используя метод, изложенный в IEC 62127-2. В этом же документе рассмотрено влияние изменения нагрузки.
В.3 Усилитель сигнала гидрофона
Назначение усилителя сигнала гидрофона - быть буфером между гидрофоном и измерительной системой. Такой буфер ослабляет резонансные эффекты кабеля на высоких частотах, а также обеспечивает дополнительное усиление и постоянную электрическую нагрузку для гидрофона. Усилитель может быть вставлен в гидрофон как встроенный в его корпус предусилитель, и в таком случае невозможно разделить эти два устройства. В альтернативном варианте это может быть отдельное устройство, к которому или непосредственно, или с помощью переходника на конце гидрофонного кабеля присоединяют гидрофон. Недостатки усилителей состоят в том, что они ограничивают динамический диапазон и требуют электрического питания, а также усложняют конструкцию гидрофона в целом. Встроенные предусилители имеют еще один недостаток: они нуждаются в дополнительных жилах (питания) гидрофонного кабеля [10].
В.4 Усилители сигнала гидрофона и длина кабеля
Когда гидрофон подсоединяют к прибору для измерения напряжения, например осциллографу или усилителю, важно учесть электрические характеристики такой составной измерительной системы.
Как правило, согласовать выходной электрический импеданс гидрофона без постоянно подсоединенного к нему кабеля с импедансом кабеля невозможно, поскольку импеданс гидрофона обычно превышает импеданс кабеля. Поэтому непрактично использовать на конце кабеля какую-то электрическую нагрузку, согласованную с импедансом кабеля, если необходимо избежать существенных потерь в амплитуде сигнала и сохранности его волновой формы. Но без согласования кабеля и нагрузки на конце кабеля будут появляться отражения, вызывающие "звон". Резонансы в кабеле становятся максимальными, когда его длина достигает четверти длины электромагнитной волны, распространяющейся по кабелю. Для обычных коаксиальных кабелей резонансы наблюдаются при длине кабеля (выраженной в метрах), равной 50/f, где f - частота, МГц. Так, например, на частоте 50 МГц причиной появления резонансов может быть кабель длиной 1 м. Значимость резонансных эффектов будет зависеть от согласования электрических импедансов на переходах кабель-нагрузка и кабель-гидрофон, а также от наличия определенных составляющих в спектре сигнала с гидрофона. Последнее зависит от ширины полосы как собственно гидрофона, так и гидрофона с постоянно подсоединенным к нему кабелем. Если толщину активного элемента гидрофона выбрать такой, чтобы резонансная частота толщинной моды колебаний была ниже резонансных частот в кабеле, то влияние последних будет пренебрежимо мало.
Если резонансы в кабеле могут попасть в частотный диапазон, соответствующий ширине полосы гидрофона, то рекомендуется выбирать кабель минимальной длины и располагать усилитель как можно ближе к гидрофону. Для ослабления влияния кабельных резонансов на выходной сигнал усилителя рекомендуется согласовывать выходной импеданс усилителя с импедансом подсоединяемого к нему кабеля, а импеданс нагрузки выбирать равным волновому импедансу кабеля. Для увеличения динамического диапазона усилителя важен правильный выбор коэффициента его усиления и ширины полосы. Для гидрофонов с чувствительностью около 0,03 мкВ/Па (типичного значения для мембранных гидрофонов из пленки ПВДФ с диаметром активного элемента 0,5 мм), используемых при измерениях параметров полей ультразвукового диагностического оборудования, пиковые акустические давления в которых могут достигать 10 МПа, будет необходим усилитель с коэффициентом усиления, равным единице, и динамическим диапазоном пиковых значений входного напряжения, равным 0,6 В [10].
Кроме того, при выборе усилителя необходимо учитывать согласование частотных характеристик гидрофона и усилителя. В частности, чтобы избежать проблем с резонансами, верхняя граница полосы частот усилителя с неравномерностью коэффициента усиления не более 3 дБ не должна превышать частоту, соответствующую резонансу толщинной моды колебаний активного элемента гидрофона. Важно также, чтобы за частотой, соответствующей толщинному резонансу, крутизна спадания коэффициента усиления усилителя была не менее минус 6 дБ на октаву.
В.5 Установка преобразователя
При установке ультразвукового преобразователя рекомендуется обеспечивать следующие условия:
Прежде всего это точная ориентация преобразователя при повороте его вокруг трех ортогональных осей, одну из которых рекомендуется выбирать параллельной оси пучка.
Несмотря на то что наличие степеней свободы непрерывных (плавных) перемещений преобразователя необязательно, может потребоваться его перемещение для установки в заданные места измерительного бака.
Ультразвуковой преобразователь устанавливают в координатную систему позиционирования таким образом, чтобы ось симметрии активного элемента была параллельна оси z системы позиционирования гидрофона. Ось симметрии ультразвуковых преобразователей с цилиндрическими активными элементами должна быть осью цилиндра, а преобразователей со сферическими активными элементами - осью, проходящей через геометрические центры сферы и излучающей поверхности ультразвукового преобразователя.
Ультразвуковой преобразователь должен быть установлен таким образом, чтобы была предусмотрена возможность его поворота вокруг оси симметрии на 360°.
Примечание - Для сферических ультразвуковых преобразователей в виде сферического сегмента за ось симметрии рекомендуется принимать ось, проходящую через геометрический центр сферы и центр окружности, ограничивающей сегмент. Для сферических ультразвуковых преобразователей в виде полной (или почти полной) сферической оболочки, поддерживаемой тонким элементом, таким, например, как трубка или стержень, осью симметрии будет ось, проходящая через центры сферы и ее опорной площадки.
В.6 Установка и юстировка гидрофона
В настоящем подразделе рекомендованы полезные процедуры установки и юстировки гидрофона в точку, соответствующую пространственному пику временного пика акустического давления в плоскости, перпендикулярной к оси распространения пучка.
Правильность установки мембранного гидрофона может быть проверена путем его поворота на 180° вокруг оси, лежащей в плоскости мембраны, наблюдая при этом за изменением сигнала на гидрофоне при приеме им импульсных сигналов. Изменение времени задержки между принимаемым гидрофоном сигналом и сигналом, излучаемым преобразователем, свидетельствует о неправильной установке гидрофона в направлении, перпендикулярном к плоскости активного элемента гидрофона, а изменение амплитуды принимаемого сигнала - о неправильном расположении активного элемента гидрофона в плоскости его мембраны. При непрерывно-волновом излучении допускается провести ту же самую процедуру с наблюдением за изменением амплитуды, а затем, если гидрофон уже установлен с точностью до одной четверти длины акустической волны в воде, выполнить более тщательную юстировку, наблюдая за изменением фазы сигнала, принимаемого гидрофоном при вращении последнего.
Правильность установки гидрофона зондового типа может быть проверена путем его поворота на угол, меньший 180°, вокруг оси, лежащей в плоскости активного элемента гидрофона.
Для юстировки гидрофонов обоих типов могут быть применены оптические технологии, например, длиннофокусный перемещаемый микроскоп или лазер с узким лучом. И в этом случае рекомендуется наблюдать за изменением положения активного элемента гидрофона при его вращении в системе микропозиционирования.
Примечание - Для того чтобы устранить влияние отражений ультразвука от поверхности мембранного гидрофона при непрерывно-волновом излучении, гидрофон может быть слегка наклонен. Такой наклон устраняет интерференцию отраженного от гидрофона сигнала с сигналом, излучаемым преобразователем или отраженным от него. Для оценки требуемого угла наклона и значения поправки, которую будет необходимо ввести для компенсации уменьшения сигнала из-за направленности гидрофона, допускается использовать два метода.
Первый метод состоит в наблюдении сигнала гидрофона при его вращении (наклоне) для определения момента, когда интерференционные эффекты станут пренебрежимо малыми. Интерференционные эффекты при их появлении можно наблюдать при изменении расстояния между гидрофоном и преобразователем на ±0,5 мм, что вызывает колебания амплитуды измеряемого сигнала. Амплитуда этих колебаний будет уменьшаться с увеличением угла наклона (поворота) гидрофона. Найденный этим методом угол обычно меньше угла, определенного вторым методом, который заключается в нахождении угла, при котором большая часть ультразвука, отраженного от мембраны, уже не попадает на преобразователь. Этот угол определяют как tg(a/2), где а - геометрический радиус активного элемента преобразователя, а
- расстояние между излучающей поверхностью преобразователя и гидрофоном. Для примера рассмотрены измерения поля преобразователя для физиотерапии с активным элементом диаметром 20 мм, работающим на частоте 1,5 МГц, с помощью двухслойного мембранного гидрофона толщиной 0,05 мм с диаметром активного элемента 0,5 мм. Для измерений на расстоянии 20 мм необходим поворот на угол 14°. Поправку в результаты измерений, связанную с направленностью гидрофона, следует определить по результатам измерений диаграммы направленности (см. 5.1.4). В рассматриваемом примере в результаты измерений акустического давления следует добавить 6%, а в результаты расчета интенсивности - 12%.
В.7 Поглощающее покрытие измерительного бака с водой
Соответствие требованиям 5.2.3.2 к суммарному снижению отражений акустического поглотителя может быть проверено с использованием процедур, изложенных ниже. Снижение уровня отражений рекомендуется измерять на частоте акустического воздействия с использованием ультразвуковых тональных импульсов и акустического поглотителя, расположенного в дальнем поле ультразвукового преобразователя. Сигнал гидрофона ![]() (по пиковым или эффективным значениям электрического напряжения), принимающего акустические сигналы, отраженные от передней поверхности акустического поглотителя, сравнивают с сигналом
(по пиковым или эффективным значениям электрического напряжения), принимающего акустические сигналы, отраженные от передней поверхности акустического поглотителя, сравнивают с сигналом ![]() этого же гидрофона при приеме им акустического сигнала, отраженного от плоского идеального отражателя. Акустический поглотитель и отражатель рекомендуется устанавливать приблизительно перпендикулярно к оси ультразвукового пучка, но немного под углом к этому перпендикуляру для того, чтобы отраженные сигналы попадали на гидрофон. Снижение уровня отражений подсчитывают как
этого же гидрофона при приеме им акустического сигнала, отраженного от плоского идеального отражателя. Акустический поглотитель и отражатель рекомендуется устанавливать приблизительно перпендикулярно к оси ультразвукового пучка, но немного под углом к этому перпендикуляру для того, чтобы отраженные сигналы попадали на гидрофон. Снижение уровня отражений подсчитывают как
![]() . (B.1)
. (B.1)
Хорошей аппроксимацией плоского идеального отражателя будет пластина из нержавеющей стали толщиной 25 мм.
В.8 Рекомендации к конструкции ультразвукового оборудования, подлежащего испытаниям
Для запуска измерительной системы необходим электрический сигнал, синхронизированный с началом возбуждения ультразвукового преобразователя или каждой группы элементов ультразвукового преобразователя.
В системах автоматического сканирования такой сигнал запуска должен быть синхронизирован по каждому периоду акустического повторения. Эти запускающие сигналы ("синхроимпульсы") рекомендуется применять при анализе принимаемых гидрофоном сигналов по любой из выбранных линий ультразвукового сканирования.
Если в системах автоматического сканирования предусмотрен режим остановки ("замораживания") сканирования, то в них должен быть обеспечен доступ к синхроимпульсу на каждой выбранной линии ультразвукового сканирования. Однако в этом случае с целью убедиться в том, что нет существенных различий в параметрах остановленного ("замороженного") и сканирующего пучков, необходимо проводить специальные исследования. Такая проверка достаточно сложна, она зависит от типа испытуемой системы сканирования. Следует учесть также, что для остановленного ("замороженного") пучка невозможно определить усредненные во времени параметры давления и интенсивности.
Примечание - Для разделения чередующихся доплеровских сигналов и линий сканирования в дуплексных системах автоматического сканирования полезно вывести сигналы запуска на отдельный осциллограф для оценки их времени задержки. Синхроимпульсы с этого осциллографа могут быть использованы для запуска измерительной системы.
В.9 Типы гидрофонов
В.9.1 Керамические гидрофоны зондового типа
Эти гидрофоны, как правило, имеют маленький круглый диск из пьезоэлектрической керамики, укрепленный на конце иглоподобного держателя. Активный элемент гидрофона опирается на акустически поглощающий материал (подложку) и имеет размер, близкий к диаметру держателя, т.е. от 0,5 до 1,5 мм в диаметре. Сигнальный кабель неизбежно пересекает ультразвуковое поле, что может привести к проблемам из-за трибоэлектрического эффекта.
Чувствительность холостого хода на конце кабеля этих гидрофонов, как правило, составляет 0,7 мкВ/Па для гидрофона с активным элементом диаметром 1 мм. При тщательной разработке они могут иметь плоскую частотную характеристику до 6 МГц. Однако в общем случае радиальные резонансные моды в активном элементе и реверберация в материале подложки нередко приводят к неравномерности частотной характеристики, достигающей ±10 дБ в частотном диапазоне от 0,5 до 15 МГц. Кроме того, характеристика направленности большинства существующих керамических гидрофонов зачастую непредсказуема и может существенно отличаться от теоретических предположений [24], [25].
В.9.2 Зондовые гидрофоны из ПВДФ
По внешней конструкции эти гидрофоны похожи на описанные выше керамические гидрофоны зондового типа. Однако здесь в качестве активного элемента используют ПВДФ. Как правило, чувствительность холостого хода на конце однометрового кабеля такого гидрофона с активным элементом диаметром 1 мм составляет 0,12 мкВ/Па, а резонансная частота - выше 25 МГц. Аккуратно изготовленные образцы имеют ровную частотную характеристику (±1,5 дБ) и близкую к расчетной диаграмму направленности. Эффективный диаметр таких гидрофонов очень близок к физическому диаметру активного элемента [10], [25]-[27].
В.9.3 Мембранные гидрофоны на основе ПВДФ
Гидрофон этого типа состоит из тонкой пленки из ПВДФ, натянутой на кольцеобразную рамку. Электроды напылены на обе поверхности, и область их перекрытия после ее поляризации образует активный элемент. Выпускаются различные конструкции с разными типами электрического экранирования активного элемента. Важно, чтобы диаметр мембраны был значительно больше поперечного размера ультразвукового пучка, тогда она пропускает большую часть ультразвука. В этой конструкции гидрофона радиальные резонансные моды в мегагерцовой области частот отсутствуют, и поэтому зависимость чувствительности от частоты не столь выражена. Как правило, для активных элементов диаметром 1 мм чувствительность холостого хода мембранного гидрофона на конце кабеля длиной 0,7 м составляет около 0,10 мкВ/Па, а резонансная частота для пленки ПВДФ толщиной 0,025 мм приблизительно 40 МГц. Характеристика направленности близка к расчетной на всех частотах, включая и низкую мегагерцовую область, где поверхностные волны приводят к росту боковых лепестков диаграммы направленности ([11], [25], [28], 29]).
В.9.4 Оптоволоконные гидрофоны
В оптоволоконных гидрофонах, разрабатываемых для измерений параметров медицинских ультразвуковых полей, волокно ориентируют таким образом, чтобы его торец был перпендикулярен к направлению распространения ультразвуковой волны, т.е. так же, как и активный элемент в пьезоэлектрических гидрофонах зондового типа. При такой конфигурации оптоволокно работает скорее как внешний, а не внутренний чувствительный элемент, основная функция которого заключается в простой передаче когерентной волны света к кончику волокна, где и происходит процесс преобразования. Для создания отраженного светового сигнала, на который воздействует акустическое поле, разработаны три основные конструкции. В наиболее простейшей из них волокно без оболочки уложено в форме прямого круглого цилиндра. В двух других конструкциях для получения чувствительности, сравнимой с чувствительностью пьезополимерных гидрофонов, применяют технологическую доработку торца оптоволокна, однако собственно конструкция достаточно проста и ремонтопригодна. При выборе типа оптоволоконного гидрофона учитывают следующие обстоятельства:
a) для гидрофонов, основанных на изменении показателя преломления, например, на торце оптоволокна [21].
В наипростейшем случае свет от лазерного светодиода передается по многомодовому волокну к зачищенному торцу. Хорошей аппроксимацией для коэффициента отражения R по интенсивности будет выражение ![]() , где
, где и
- коэффициенты отражения сердцевины волокна и воды соответственно. Изменения давления в акустической волне вызывают изменения плотности, а значит, и показателей преломления, а также и интенсивности отраженного света. Минимальное значение определяемого изменения давления составляет 0,5 МПа, но это значение может быть уменьшено применением более мощных источников света или более чувствительных фотодетекторов. Торец волокна устойчив к повреждениям, но все-таки подвержен им при воздействии кавитации. В таком случае поврежденный торец допускается отрезать без существенного изменения чувствительности гидрофона. Иной модификацией гидрофона этого типа будет использование на торце волокна толстого стеклянного блока ([30], [31]);
b) для гидрофонов на основе двухлучевого интерферометра [32]-[34].
Для повышения чувствительности торец волокна может быть выполнен зеркальным и встроен в одно из плеч двухлучевого интерферометра. Изменение фазы светового сигнала из-за перемещения торца волокна пропорционально акустическому смещению или (при применении техники гетеродинирования) скорости частиц среды, по которым может быть вычислено значение акустического давления.
c) для гидрофонов на основе интерферометра Фабри-Перо [35]-[40].
В качестве альтернативы оптически сложному двухлучевому интерферометру, но с сохранением высокой чувствительности, может быть интерферометр Фабри-Перо, если на торце оптического волокна установить ячейку Фабри-Перо. При прохождении света по оптоволокну возникают отражения от поверхностей раздела волокна и ячейки, ячейки и нагрузки (воды). Коэффициенты отражения определяют по формуле Френеля для необлицованной ячейки или по материалу и толщине покрытия поверхностей ячейки.
Отмечены различные причины искажений сигнала оптоволоконными гидрофонами и исследованы некоторые способы компенсации этих эффектов [41]-[44]. Были разработаны также гидрофоны на основе интерферометра Фабри-Перо с плоскими подложками. Их преимущество состоит в возможности использования матрицы (решетки) датчиков [45], [46] и устранении влияния эффектов акустического резонанса в оптоволокне на частотную характеристику гидрофона [47].
В.9.5 Сравнение характеристик гидрофонов различных типов
Выбор конкретного типа гидрофона для определенных измерений будет зависеть от множества факторов. При наличии многочисленных разновидностей конструкций гидрофонов рассмотренных выше типов невозможно выработать однозначные рекомендации по выбору наиболее подходящего гидрофона. Тем не менее во внимание могут быть приняты следующие положения:
a) мембранный гидрофон имеет меньшую неравномерность частотной характеристики чувствительности, чем гидрофон зондового типа;
b) чувствительность гидрофона с керамическим активным элементом, как правило, выше чувствительности гидрофона с активным элементом того же самого диаметра из ПВДФ;
c) мембрана в мембранных гидрофонах представляет собой для ультразвукового пучка большое плоское препятствие с конечной отражательной способностью. Отраженная часть ультразвуковой волны может возвратиться в когерентном виде к ультразвуковому преобразователю и вызвать на нем интерференцию [48]. Это особенно важно для ультразвуковых преобразователей, излучающих непрерывную волну, и следует учесть этот источник погрешности, хотя его вклад в результаты измерений, как правило, может быть сведен к минимуму. Эффекты отражений от гидрофонов зондового типа тоже существуют, но проявляются в меньшей степени.
В.10 Типичные характеристики гидрофонов
Типичные характеристики гидрофонов приведены в таблице В.1.
Таблица В.1 - Типичные характеристики гидрофонов на частоте 1 МГц [49]
Тип гидрофона | Чувствительность на конце кабеля под нагрузкой | Импеданс электрической нагрузки | Длина кабеля, м | Емкость на конце кабеля С или импеданс гидрофона | Чувствительность холостого хода на конце кабеля |
Зондовый ПВДФ диаметр 1 мм | 0,100 | 1 МОм | 1 | 130 пФ | 0,123 |
Зондовый ПВДФ диаметр 0,6 мм | 0,032 | 1 МОм | 1 | 130 пФ | 0,039 |
Мембранный ПВДФ диаметр 1 мм | 0,098 | 50 кОм | 0,7 | Re(Z)=170 Ом | 0,102 |
Мембранный ПВДФ диаметр 0,5 мм | 0,033 | 50 кОм | 0,7 | Re(Z)=220 Ом | 0,035 |
Керамический зондовый диаметр 1 мм | 0,56 | 1 МОм | 1 | 150 пФ | 0,67 |
Приложение С
(справочное)
Акустическое давление и интенсивность
Традиционно ультразвуковые поля описывают параметрами интенсивности, что соответствует и непосредственно относится ко многим их применениям.
Тем не менее мгновенная интенсивность (t) может быть задана как:
![]() , (С.1)
, (С.1)
где - мгновенное акустическое давление;
- колебательная скорость частиц среды.
Мгновенная интенсивность в плоской бегущей волне может быть выражена как:
![]() (С.2)
(С.2)
или
![]() . (С.3)
. (С.3)
Эти выражения имеют ограниченное действие и не могут быть применены в общем случае для всего акустического поля. Тем не менее для вычисления мгновенных значений интенсивности по результатам измерений мгновенных значений акустического давления с помощью гидрофонов используют только выражение (С.2).
Для подтверждения значимости этого выражения может быть показано, например, что отношение истинного значения интенсивности к ее значению, полученному в предположении плоской бегущей волны, равно 0,66 на расстоянии 5 мм от поверхности круглого поршневого ультразвукового преобразователя диаметром 30 мм, генерирующего непрерывную волну. На расстоянии, равном диаметру ультразвукового преобразователя, это отношение равно 0,94 [50].
С учетом этого в настоящем стандарте для описания акустического поля рекомендуется использовать измеряемые параметры акустического давления.
Необходимые для расчета интенсивности значения плотности р и скорости звука с для дистиллированной или деионизированной воды в зависимости от температуры представлены в таблице С.1.
Таблица С.1 - Свойства дистиллированной или деионизированной воды в зависимости от температуры [51]
Температура Т, °С | Плотность воды | Скорость звука в воде с, м/с | Удельный акустический импеданс |
16 | 0,9989 | 1469,4 | 1,4678 |
18 | 0,9986 | 1476,0 | 1,4739 |
20 | 0,9982 | 1482,3 | 1,4796 |
22 | 0,9978 | 1488,3 | 1,4850 |
24 | 0,9973 | 1494,0 | 1,4900 |
26 | 0,9968 | 1499,3 | 1,4945 |
28 | 0,9962 | 1504,4 | 1,4987 |
_______________
* Текст документа соответствует оригиналу, здесь и далее по тексту. - .
Приложение D
(справочное)
Преобразование электрического напряжения в давление
D.1 Общие положения
Соотношение между давлением, воздействующим на гидрофон, и электрическим напряжением на его выходе выражается через чувствительность на конце кабеля гидрофона под нагрузкой, часто определяемой в широком диапазоне частот. В настоящем стандарте преобразование измеренного электрического напряжения (t) на конце кабеля гидрофона в мгновенное значение акустического давления p(t) осуществляют при использовании выражения:
![]() , (D.1)
, (D.1)
если частотная характеристика гидрофона соответствует критерию, приведенному в 5.1.7, или при использовании выражения:
![]() , (D.2)
, (D.2)
приведенного в 5.1.2.
Такой подход обоснован тем, что выражение (D.1) верно в тех случаях, когда:
- излучаемое ультразвуковым преобразователем акустическое поле характеризуется очень узкой полосой частот или
- чувствительность на конце кабеля гидрофона под нагрузкой в его полосе частот не сильно отличается от чувствительности, измеренной на частоте акустического воздействия.
Во всех других случаях частотную характеристику гидрофона следует получить обратной сверткой напряжения на конце кабеля, используя выражение (D.2). Это требование дополняет требования к ширине полосы, изложенные в 5.1.7.
Чувствительность на конце кабеля гидрофона под нагрузкой ![]() - комплексная величина, но исторически используют только значение ее модуля. Тем не менее в настоящее время некоторые национальные лаборатории эталонов могут измерять и фазочастотные характеристики гидрофонов. В этом случае при обратной свертке выражения (D.2) могут быть использованы и измеренные фазовые характеристики [22], [52].
- комплексная величина, но исторически используют только значение ее модуля. Тем не менее в настоящее время некоторые национальные лаборатории эталонов могут измерять и фазочастотные характеристики гидрофонов. В этом случае при обратной свертке выражения (D.2) могут быть использованы и измеренные фазовые характеристики [22], [52].
D.2 Процедура обратной свертки результатов гидрофонных измерений
Процедура обратной свертки результатов гидрофонных измерений в соответствии с выражением (D.2) показана на рисунке D.1 в виде блок-схемы операций обработки.
D.3 Преобразование двухстороннего спектра в односторонний и обратно
Результаты калибровки гидрофона, как правило, представляют в диапазоне положительных значений частоты, в то время как после традиционного быстрого преобразования Фурье получают ряд данных, расположенных по частотам с центром на нулевой частоте, т.е. с компонентами, лежащими как в области положительных, так и отрицательных частот. Симметрия частотного спектра упрощает переход к одностороннему спектру (содержащему только положительные значения частоты) для последующей обработки результатов гидрофонных измерений методом обратной свертки. Часто эти данные представляют в виде только одностороннего спектра, не подозревая о двухсторонней природе исходного спектра частот. Следует учесть, что некоторые коммерческие программы преобразования Фурье не обеспечивают точного выполнения этого процесса. Ниже приведено подробное описание данных проблем и путей их решения.
Рассмотрен набор данных, распределенных по частотам с частотой Найквиста
=
/2. Типовой алгоритм быстрого преобразования Фурье (БПФ) возвращает точки, расположенные так, что первая точка имеет частоту
, затем
,
, ... и до
. Следующая точка расположена на
, а затем на
![]() ,
, ![]() . Для всех составляющих, отличных от нулевой частоты (соответствующей постоянному току), амплитуды точек, соответствующих положительным и отрицательным частотам, равны, и односторонний спектр может быть получен простым удваиванием амплитуд всех составляющих, отличных от постоянного тока. Исчерпывающее обсуждение проблем, связанных с преобразованием Фурье, приведено в [53].
. Для всех составляющих, отличных от нулевой частоты (соответствующей постоянному току), амплитуды точек, соответствующих положительным и отрицательным частотам, равны, и односторонний спектр может быть получен простым удваиванием амплитуд всех составляющих, отличных от постоянного тока. Исчерпывающее обсуждение проблем, связанных с преобразованием Фурье, приведено в [53].
Проблема некоторых имеющихся на рынке программ по преобразованию двухстороннего спектра в односторонний состоит в том, что они делят пополам размер матрицы данных и удваивают амплитуды всех составляющих, кроме первой. Такой метод некорректен, поскольку для ряда из N-данных сигнал постоянного тока представляет собой первую точку в ряде данных с положительными значениями частоты, занимающими следующие N/2 положений в матрице. Таким образом, данные на частоте Найквиста (весьма важной) находятся в положении N/2+1. Однако вышеуказанный метод простого выделения первой половины последовательности данных исключает эту точку. Невозможность включить точку с данными на частоте Найквиста приведет к ошибкам и фазовым искажениям, будет мешать проведению обратного преобразования Фурье заведомо правильной последовательности. В таблице D.1 показан правильный метод выполнения этого преобразования.
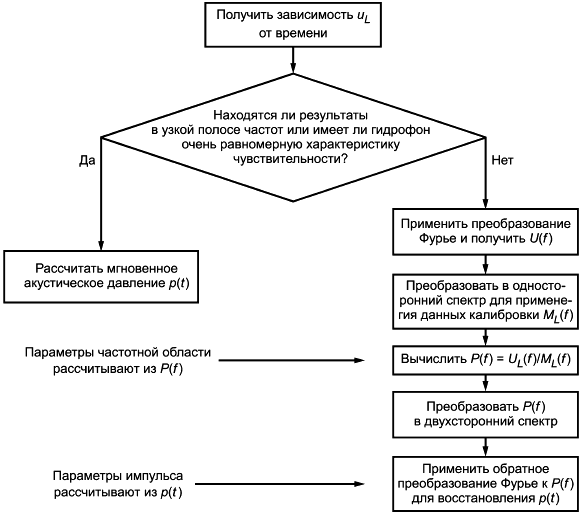
Рисунок D.1 - Блок-схема обработки результатов гидрофонных измерений методом обратной свертки
Таблица D.1 - Метод преобразования двухстороннего спектра (DS) в односторонний (SS)
Двухсторонний спектр. | Односторонний спектр. |
DS[1] | SS[1]=DS[1] |
DS[2] | SS[2]=2·DS[2] |
DS[3] | SS[3]=2·DS[3] |
… | … |
DS[N/2] | SS[N/2]=2·DS[N/2] |
DS[N/2 +1] на частоте Найквиста | SS[N/2+1]=2·DS[N/2+1] |
DS[N/2+2] | Отбрасывают |
… | … |
Подобную осторожность следует соблюдать и при обратном преобразовании одностороннего спектра в двухсторонний с использованием обратного преобразования Фурье, учитывая, что данные на нулевой частоте (постоянный ток) и частоте N/2+1 (частота Найквиста) появляются в двухстороннем спектре лишь один раз, в то время как все другие составляющие появляются дважды (в виде составляющих положительной и отрицательной частот). В таблице D.2 показан правильный метод выполнения преобразования из одностороннего в двухсторонний спектр.
Таблица D.2 - Метод преобразования одностороннего спектра (SS) в двухсторонний (DS)
Односторонний спектр. | Двухсторонний спектр. |
SS[1] | DS[1]=SS[1] |
SS[2] | DS[2]=SS[2]/2 |
SS[3] | DS[3]=SS[3]/2 |
… | … |
SS[N/2] | DS[N/2]=SS[N/2]/2 |
SS[N/2+1] | DS[N/2+1]=SS[N/2+1] |
DS[N/2+2]=SS[N/2]/2 | |
DS[N/2+3]=SS[N/2-1]/2 | |
… | |
DS[N]=SS[1]/2 |
D.4 Использование данных калибровки гидрофона
Комбинация интервала выборки и числа отсчетов определяет частотный интервал спектра измеряемого сигнала в соответствии с выражением:
приращение частоты=1,0/(приращение времени·число точек).
Часто бывает так, что это приращение частоты измеренных значений отличается от промежутков между частотами калибровки гидрофона. Для того чтобы данные калибровки были применимы для частот, на которых получены результаты измерений, может потребоваться интерполировать значения соседних по частоте данных калибровки. Эффективным средством получения дополнительных данных калибровки может быть процедура интерполяции кубическими сплайнами или сплайнами Безье. Одно из преимуществ этих методов состоит в том, что первоначальная компьютерная обработка интерполяционной функции необходима лишь один раз. Затем интерполяционную функцию можно применить и для других промежутков частот. Таким образом может быть предварительно рассчитана и сохранена для дальнейшего применения более детальная частотная характеристика чувствительности гидрофона.
Данные калибровки гидрофона необходимы и для экстраполяции его частотной характеристики в сторону высоких частот. Подходящая частота выборки, например 5·10 отсчетов в секунду, соответствует частоте Найквиста, равной 250 МГц. Именно до этой частоты требуются данные калибровки гидрофона для выполнения операции обратной свертки. Экстраполяцию данных калибровки необходимо провести таким образом, чтобы устранить влияние высокочастотного шума на волновую форму сигнала, полученную методом обратной свертки. Такой шум может возрастать из-за низкочастотной чувствительности гидрофона и с проявлением так называемого феномена Гиббса. Приемлемое подавление этих шумов может быть достигнуто низкочастотной фильтрацией спектра импульсов давления перед его преобразованием к временному представлению, а затем проверено методом сравнения вклада высокочастотного шума в волновую форму после применения операции обратной свертки и без ее применения (см. рисунок D.2).
D.5 Влияние процедуры обработки результатов гидрофонных измерений методом обратной свертки на продолжительность измерений
Определение многих акустических параметров связано с трудоемкими процессами сканирования гидрофоном всего акустического поля. Данные, изображенные на рисунке D.2, получены при существенном увеличении продолжительности измерений. Тем не менее при правильном применении процедуры предлагаемой обработки может быть уменьшено добавочное время на ее проведение.
Большинство систем автоматического сканирования гидрофоном акустического поля работают под управлением персонального компьютера (ПК). Несмотря на то что современные цифровые осциллографы имеют большие возможности в первоначальной обработке результатов измерений, их окончательную обработку осуществляют на ПК. Снижение продолжительности этой процедуры заключается в своевременном поступлении результатов измерений на ПК за время перемещения гидрофона от одной к другой точке измерений. Если эти данные поступили на ПК, то обратная свертка (два преобразования Фурье и деление) может быть проведена быстро. Эффективная реализация этого процесса обеспечивает пользователю обзор волновой формы сигнала в реальном времени и позволяет ему проводить своевременную установку гидрофона в точки с максимальными значениями измеряемых параметров.
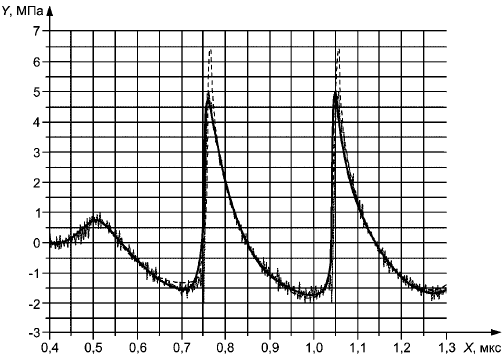
- результаты расчета давления через
и
![]() ;
;
- результаты обратной свертки
![]() ;
;
- результаты обратной свертки с низкочастотной фильтрацией (-6 дБ на 80 МГц)
Рисунок D.2 - Результаты обратной свертки волновой формы на примере доплеровского импульса давления, измеренного зондовым гидрофоном
Приложение Е
(справочное)
Поправки на пространственное усреднение
При проведении большинства измерений параметров ультразвуковых диагностических полей диаметр активного элемента используемого гидрофона сравним с шириной ультразвукового пучка, и гидрофон измеряет некое давление, усредненное по площади его активного элемента, а не давление в центре активного элемента. Разница между этими давлениями зависит от пространственного изменения ультразвукового поля. Разработан простой метод [54], [55] введения поправки на эффекты пространственного усреднения, в котором используют профиль ультразвукового пучка, полученный при его сканировании с шагом, равным радиусу активного элемента гидрофона. Применяют и другие упрощенные методы [56]-[61].
Введение поправок предполагает следующие допущения:
a) Выходной сигнал гидрофона пропорционален акустическому давлению, усредненному по его активному элементу, приемная поверхность которого предполагается круглой с радиусом, равным геометрическому радиусу активного элемента.
b) Распределение поля в радиальном направлении в фокальной плоскости преобразователя от точки, соответствующей пиковому значению давления на оси пучка, до точки, отстоящей от первой на расстояние, равное радиусу активного элемента гидрофона, может быть представлено квадратичной зависимостью давления p(r) от расстояния r в виде: ![]() , где b - постоянный коэффициент. Пределы погрешности этой поправки связаны с предположением, что идеальный профиль пучка может быть представлен функцией Бесселя:
, где b - постоянный коэффициент. Пределы погрешности этой поправки связаны с предположением, что идеальный профиль пучка может быть представлен функцией Бесселя:
![]() , (E.1)
, (E.1)
где k - волновое число;
а - радиус преобразователя;
r - расстояние от оси в фокальной плоскости;
d - фокусное расстояние;
- функция Бесселя первого рода первого порядка.
c) Процедура введения поправок для сигналов пилообразной волновой формы (искаженной из-за нелинейности распространения) будет несколько другой.
При этих предположениях поправочный множитель в центре пучка будет равен:
![]() , (E.2)
, (E.2)
где
![]() . (Е.3)
. (Е.3)
Выражение (Е.2) получено в результате свертки частотной характеристики гидрофона в предположении "правильного" профиля ультразвукового поля для двух его точек и предположении того, что представляет собой отношением истинного значения давления в удаленной от оси точке к давлению, измеренному на оси пучка. Введение поправки в виде
=(
-1) правомочно при
>0,8, что соответствует использованию гидрофона с радиусом активного элемента, меньшим 0,6 радиуса пучка (на уровне минус 6 дБ). Для применяемых в настоящее время гидрофонов с активным элементом диаметром 0,5 мм при измерении ультразвукового пучка радиусом (на уровне минус 6 дБ) больше 0,4 мм поправка будет меньше 10%.
Такой метод введения поправки может оказаться неверным при измерении сигналов пилообразной волновой формы, и в этом случае более приемлемым может быть другое выражение [55].
Поправочный множитель в центре пучка будет равен:
![]() , (E.4)
, (E.4)
где
![]() . (Е.5)
. (Е.5)
Погрешность поправки =(
-1) будет около 10% для
>0,92.
Следует отметить, что эффективный диаметр правильно сконструированных зондовых гидрофонов на основе ПВДФ достаточно предсказуем. Частотная характеристика мембранных гидрофонов более сложна, и в некоторых случаях на низких частотах геометрический радиус активного элемента мембранного гидрофона может не быть равным его эффективному радиусу, определяемому из измерений диаграммы направленности [25]. В этом случае процедуру изменяют и перемещают гидрофон на расстояние, равное не геометрическому, а эффективному радиусу.
Экспериментальные результаты с использованием множества гидрофонов с активными элементами различных размеров [18] показывают, что изложенная выше процедура для сильно сфокусированных ультразвуковых полей занижает величину поправки. В других работах [62] показано, что основная причина занижения - это остаточные (неустраненные обработкой) искажения волновой формы из-за нелинейности распространения.
Исследования показали [62], что при <0,5 рассмотренная выше процедура дает обоснованную оценку поправок на пространственное усреднение для всех акустических параметров с погрешностью от 10 до 15%. Для оценки поправок на пространственное усреднение сигналов с более искаженной волновой формой могут быть предусмотрены перечисленные ниже режимы в зависимости от параметра
- отношения ширины пучка (на уровне минус 6 дБ) к эффективному диаметру гидрофона. Возможные значения поправок для пикового акустического давления сжатия
, пикового акустического давления разрежения
и интеграла квадратов давления в импульсе ppsi составят [62]:
Для >2: при 0,5<
<1,5 максимальные поправки для
и
составят приблизительно 13%, для ppsi меньше 25%; при
>1,5 поправки к пиковым давлениям будут выше, но маловероятно, что они будут превышать 20%.
Для 1,52: при
<1,5 поправки к
и
будут меньше 20%, а для ppsi они не превысят 40%. Для более высоких значений
поправки для
,
и ppsi могут превысить 30, 20 и 50% соответственно.
Для <1,5: в этом режиме эффекты пространственного усреднения проявляются более существенно, и особенно для
и
при всех значениях
. Поправки для
могут достигать 50%, но они незначительно отличаются от поправок, полученных по рассмотренной выше методике. В противоположность этому поправки для
могут быть порядка 100% при 0,5<
<1,5, а при
>2 могут превышать 200% при том, что для ppsi такое превышение составит 300%. Поэтому в ситуациях, когда
<1,5, важно использовать гидрофон более малых размеров.
Приложение F
(справочное)
Параметры акустического выхода ультразвукового медицинского оборудования, работающего в многомодовом режиме, при отсутствии синхронизации сканирования
F.1 Общие положения
В первых моделях ультразвуковых сканеров для генерирования ультразвукового поля использовали одиночные кристаллические преобразователи с фиксированным фокусным расстоянием. Такой преобразователь или закрепляли стационарно (для работы в режимах А и М), или механически перемещали из стороны в сторону (для работы в В-режиме). Изобретение фазированных и линейных решеток позволило обеспечить электронное управление фокусировкой и процессом сканирования в В-режиме. До настоящего времени применяют внедренный 15 лет назад статический доплеровский режим (D-режим или PWD-импульсно-волновой доплер) и цветовую визуализацию кровотока (CF-режим). В последние годы появились технологии, основанные на использовании гармонических составляющих отраженного сигнала и трехмерной визуализации, причем каждый из этих режимов может функционировать в совокупности с другими режимами или их комбинациями. Такие возможности не охватываются методами измерений, рассмотренными в настоящем стандарте. Действующие в настоящее время национальные и международные стандарты, касающиеся измерений параметров акустического выхода, основаны на методах, разработанных до 1993 года, реализация которых для измерения современных систем очень трудоемка, а зачастую и невозможна. Поэтому назрела необходимость пересмотра определений некоторых существующих параметров и методов измерений, а возможно, и разработки новых, более подходящих для испытаний современных систем ультразвуковой визуализации. В настоящем приложении обоснованы новые подходы, которые, возможно, будут отражены в нормативных документах. Такие подходы могут оказаться полезными при испытаниях систем, которые не генерируют повторяющихся циклов сканирования.
F.2 Современный подход
Подход, положенный в основу существующих стандартов, касающихся методов измерений, предполагает, что ультразвуковое поле генерируют с помощью одиночного кристалла неизменной геометрии. Отправная точка такого подхода состоит в том, что излучают ультразвуковые импульсы одного и того же типа, характеризующиеся акустической частотой, длительностью и параметрами его фокусировки. Импульсы излучаются или по одному и тому же направлению - оси пучка (для несканирующих режимов А, М или D), или по ряду отдельных однозначно определяемых направлений (для сканирующих режимов В или CF). Каждый из этих режимов представляют как отдельный ("дискретный") режим работы прибора; причем для сканирующих режимов предполагается, что повторяющиеся последовательности импульсов образуют "кадр сканирования" и каждый из этих "кадров" содержит одно и то же число импульсов.
Для простых дискретных режимов такой подход вполне приемлем. Измерения в несканирующих режимах могут быть выполнены при перемещении гидрофона вдоль оси пучка и установке его в точку фокуса на этой оси. Основные параметры ультразвукового поля, определенные стандартами IEC, перечислены в таблице F.1.
Таблица F.1 - Основные параметры ультразвукового поля
Пиковое акустическое давление сжатия | |
Пиковое акустическое давление разрежения | |
Частота акустического воздействия | |
Длительность импульса | |
ppsi | Интеграл квадратов давления в импульсе |
Пространственный пик усредненной за импульс интенсивности | |
Пространственный пик усредненной по времени интенсивности | |
Ширина пучка на уровне минус 6 дБ | |
Усредненная по пространству и времени интенсивность | |
P | Полная ультразвуковая мощность |
Расстояние от внешней апертуры преобразователя до точки, соответствующей максимальному значению интеграла квадратов давления в импульсе | |
Расстояние от внешней апертуры преобразователя до точки, соответствующей пространственному пику усредненной во времени интенсивности | |
prr | Частота повторения импульсов |
srr | Частота повторения сканирования |
Для дискретных режимов сканирования, в которых "кадр сканирования" состоит из N отдельных линий сканирования, измерения по каждой из этих линий сканирования можно упростить и характеризовать их тем же самым способом, что и для несканирующего пучка, за исключением того, что следует учесть некоторые отклонения в значениях , связанные с перекрытием линий сканирования, и полной мощности, включающей в себя вклад всех линий сканирования. Дополнительные сложности возникают также из-за того, что перекрытие линий сканирования различно на различных расстояниях от преобразователя, а положения точек, соответствующих максимумам
и ppsi на оси пучка в общем случае не совпадают друг с другом. Предполагается также, что при усложнении режимов возбуждения остается возможность выделить конкретные дискретные режимы с регулярными периодами повторения сканирования.
F.3 О необходимости внесения изменений
Рассмотренный выше подход возможен лишь в том случае, когда число линий сканирования в "кадре сканирования" остается неизменным после соответствующих установок органов управления прибора. Во многих современных сканерах число линий сканирования непрерывно меняется, в результате чего синхронизация измерительного процесса с возбуждением определенного требуемого импульса становится невозможной. Это означает, что измерение требуемых параметров может быть проведено только фирмой-изготовителем, имеющей специальное оборудование, предназначенное для этих целей. Более того, эти измерения чрезвычайно трудоемки и возможность их проведения для контроля основных характеристик систем визуализации, а также безопасности их акустического выхода остается под вопросом.
F.4 Предлагаемые изменения
F.4.1 Новый подход
Предлагаемый здесь новый подход не требует синхронизации с "кадром сканирования". По крайней мере такой подход предусматривает включение параметров, определяющих длительное безопасное (для пациента) ультразвуковое исследование. В настоящее время под этими параметрами подразумевают факторы, которые могут вызвать нагрев тканей и кавитацию (или иное воздействие пузырьков). Необходимо предусмотреть возможность измерения этих параметров для какого-то поля, не имея специальных сведений о сканере (несмотря на то что такие сведения ускорили бы проведение измерений). Тем не менее будет возможно использовать и существующие методы измерений, и аппаратуру, а также вычислять параметры поля из соответствующей комбинации параметров отдельных импульсов. Такой подход важен потому, что позволяет фирмам-изготовителям и другим измерительным лабораториям использовать уже существующую метрологическую базу.
По мере возможности требуемые акустические параметры будут базироваться на части существующих параметров, определенных IEC, но несколько модифицированных с учетом изменений в подходе, заключающемся в том, что поле не рассматривается далее состоящим из повторяющихся посылок дискретных импульсов с легко определяемой центральной частотой каждый.
F.4.2 Новые параметры
Для систем, излучение которых не соответствует узкополосному приближению, необходимо записать волновую форму, а также привести поправки на ограничение полосы частот или конечные размеры активного элемента гидрофона, как это требуется или рекомендуется в основном тексте настоящего стандарта. Тем не менее большинство новых параметров выбрано таким образом, чтобы их можно было определить для систем, соответствующих узкополосному приближению, с помощью приборов, измеряющих только пиковые или эффективные значения электрического напряжения, за исключением частоты акустического воздействия, для определения которой необходимо провести спектральный анализ. В таблице F.2 представлены параметры, которые следует использовать или исключить.
Таблица F.2 - Параметры, которые следует использовать или исключить
Как в действующем определении. | |
Как в действующем определении. | |
Вычисляют по спектру измеренных давлений в течение не менее 1 с или из анализа Фурье импульса, содержащего пик-отрицательное давление (детальное рассмотрение см. ниже). | |
Не требуется. | |
ppsi | Не требуется. |
Не требуется. | |
Как в действующем определении. | |
Определяют по распределению | |
Как в действующем определении. | |
P | Как в действующем определении. |
Как в действующем определении. | |
Как в действующем определении. | |
prr | Не требуется |
srr | Не требуется |
F.5 Новые методы измерений
F.5.1 Общие положения
Измерения выполняют с использованием соответствующего гидрофона с предусилителем. Измерения в каждой конкретной точке следует проводить настолько долго, сколько это требуется для того, чтобы захватить всю значимую часть акустического сигнала, но, как правило, не более 1 с.
В настоящее время все большее применение находят современные осциллографы и цифровые устройства памяти, которые обеспечивают чрезвычайно длительный прием и сохранение информации для ее последующего анализа. Использование таких устройств перспективно для определения всех необходимых параметров акустического поля. Поскольку уже не предполагается повторяемость акустических сигналов, невозможна их выборка, эквивалентная масштабу времени, следовательно, для точного представления сигнала гидрофона необходимо использовать однократный цифровой отбор сигнала по всей ширине полосы.
F.5.2 Для измерений пиковых значений давления
Для поиска пиковых положительных и отрицательных значений давления можно принять и сохранить большое число импульсов, отдельно выделив те из них, которые имеют предельные значения параметров. В целях упрощения допускается использовать режим выделения "огибающей" или схему пикового детектора.
F.5.3 Для определения усредненной по времени интенсивности
Наиболее общим методом является оцифровка каждого акустического импульса и вычисление по этим данным усредненной по времени интенсивности.
При наличии сигнала запуска, соответствующего моменту возбуждения преобразователя, процесс измерений был бы проще. При его отсутствии сбор данных может быть осуществлен путем непрерывной выборки принимаемого сигнала. В этом случае может потребоваться предварительная обработка сигнала гидрофона, чтобы уменьшить электрические шумы и устранить сигналы неакустического происхождения.
Примечание - Во многих случаях для измерения очень высокая частота выборки может и не потребоваться, так как энергия N-гармонической составляющей, связанной с нелинейностью распространения, будет равной или меньше, чем (1/N
) энергии составляющей на основной частоте.
В принципе может быть измерена и более простым способом: с помощью вольтметра эффективных значений (измерителя мощности в радиочастотном диапазоне) с соответствующим датчиком. На практике электрический шум и инерционность датчика могут затруднить измерения низких значений
. Однако для большинства полей клинического назначения, в которых
приближается к предельным значениям [установленным нормативами США FDA510(k)], этот метод может быть применен как для определения местоположения точек с пиковыми значениями
, так и для измерения
и ширины пучка на уровне минус 6 дБ.
F.5.4 Для измерения частоты
С точки зрения стандартов по безопасности различают две причины, почему необходимо знать акустическую частоту. Первая связана с возникновением кавитации, мощность которой определена центральной частотой импульса с наибольшим значением модуля отрицательного акустического давления. Вторая связана с нагревом, значение которого приближенно определено медианной частотой спектра акустического давления. В дискретном режиме работы аппаратуры эти две частоты, как правило, совпадают. Однако в комбинированных режимах они могут существенно отличаться. Например, при работе в режиме В+CF "кадр сканирования", как правило, состоит из небольшого числа коротких импульсов с высокой амплитудой (для расширения серой шкалы) и большого числа длинных доплеровских импульсов с низкой амплитудой. Центральная частота импульсов каждого типа может лежать в пределах частотной полосы преобразователя.
Поэтому предлагают два отдельных частотных параметра:
- "механическую" акустическую частоту, определяемую в точке, где отрицательное акустическое давление достигает максимального значения. Эту частоту обозначают как частоту по пику импульса ;
- "тепловую" акустическую частоту, определяемую в точке, где максимального значения достигает усредненная по времени интенсивность. Эту частоту обозначают как усредненную по времени акустическую частоту .
Примечания
1 Для правильного определения спектра усредненного по времени акустического давления, особенно в тех случаях, когда в спектре имеются два или более далеко отстоящих друг от друга пика одинаковой амплитуды, может потребоваться ввести поправку в частотную зависимость чувствительности гидрофона и усилителя.
2 Подробную процедуру получения спектра акустической мощности в настоящее время разрабатывают.
F.5.5 Для измерения мощности
Мощность следует измерять методами радиометра или плоского сканирования.
F.6 Обсуждение
F.6.1 Взаимосвязь с существующими стандартами IEC
F.6.1.1 Стандарт IEC 61157
Изменения будут состоять в том, что измерения следует проводить не в точке, соответствующей максимальному значению интеграла квадратов давления в импульсе, а в точке максимального значения модуля акустического давления разрежения и в точке, соответствующей максимуму пространственного пика усредненной по времени интенсивности
.
Перечень декларируемых параметров для систем с низким уровнем ультразвукового излучения будет сохранен за исключением того, что определение площади выхода пучка будет основано не на ppsi, а на . Это может привести к изменению значения
для систем автоматического сканирования, но не для несканирующих систем, которые, как правило, характеризуются низким уровнем ультразвукового излучения.
F.6.1.2 Стандарты IEC 62359 и IEC 60601-2-37 ([70], см. дополнение к библиографии)
В принципе эти стандарты значительно не изменятся. Основные отличия будут заключаться в методике расчета тех тепловых индексов TI, которые связаны с изменением интенсивности с расстоянием от преобразователя. В действующем стандарте TI для каждого типа импульсов подсчитывают независимо и комбинируют не вполне удовлетворительным образом, чтобы получить значения для каждого режима сканирования. При новом подходе измеряют (или вычисляют) усредненную по времени интенсивность для режима сканирования в целом и с учетом ее изменения с расстоянием от преобразователя определяют значение TI. Это изменение будет связано и с зависимостью эффективного диаметра пучка от расстояния. Небольшие изменения будут возможны и для частоты акустического воздействия, которая влияет на затухание сигнала и приведет к внесению источником поправок при расчете TI в мягких тканях. Для несканирующих режимов результаты расчета TI будут идентичными получаемым по действующим стандартам.
При расчетах механического индекса MI следует учитывать, что используемые при расчетах значения частоты в некоторых случаях могут различаться.
F.6.2 Преимущества предлагаемого подхода
Основные преимущества заключаются в следующем:
- существенно сокращается число требуемых измерений и декларируемых параметров, так как при новом подходе необходимо выполнить только два набора измерений для каждого датчика вместо двух наборов измерений для каждого режима, в которых работает каждый датчик;
- определения новых параметров могут быть применимы и для более сложных излучений, которые могут быть реализованы в будущем с развитием новых технологий визуализации;
- измерения даже сложных режимов работы могут быть выполнены на относительно простом измерительном оборудовании.
Могут быть использованы и существующие методы измерений, которые дадут непротиворечивые результаты. Для простых несканирующих систем (а возможно, и для многих других) значения акустических параметров не будут отличаться от значений, полученных существующими методами.
F.6.3 Недостатки
Недостатками технического характера можно считать:
- введение второго числового значения частоты;
- возможную чувствительность метода к электрическому шуму;
- вероятную потребность в небольших изменених в существующем измерительном оборудовании и методиках выполнения измерений;
- вероятность существенного увеличения памяти для долговременной (более 1 с) записи последовательностей импульсов.
Приложение G
(справочное)
Среда распространения и ее дегазирование
Признано, что акустическая кавитация существенно влияет на результаты измерений. Кавитация - это рост, колебания и схлопывание присутствующих в среде микропузырьков газа или пара. В процессе измерений эти пузырьки рассеивают ультразвук, генерируемый испытуемым преобразователем, что приводит к нестабильности результатов измерений и занижению значений измеряемой величины. Поэтому необходимо знать момент возникновения кавитации во время измерений, а также создавать условия, при которых эффекты кавитации будут минимизированы.
Метод измерения, позволяющий определить начало кавитации, изложен в [63], [64]. В частности, возникновение инерционной кавитации обычно сопровождается появлением гармоник основной частоты работы преобразователя, обнаруживаемым по спектру акустического сигнала, измеренного, например, зондовым гидрофоном [63], [64].
Методы дегазации воды исследованы в [65] и перечислены в [71] (см. дополнение к библиографии).
Приложение Н
(справочное)
Ультразвуковые поля конкретного назначения
Н.1 Диагностические поля
Н.1.1 Полезные соотношения между акустическими параметрами
Существует несколько соотношений между различными акустическими параметрами, которые могут быть использованы для проверки правильности измерений акустического выхода. Некоторые из них приведены ниже.
Пространственный пик усредненной по импульсу интенсивности связан с пространственным пиком усредненной во времени интенсивности
через выражение:
![]() . (Н.1)
. (Н.1)
Для определения полной ультразвуковой мощности могут быть использованы методы, изложенные в 7.2.7 или [71] (см. дополнение к библиографии). Если полная мощность Р известна, то может быть определена усредненная по пространству и во времени интенсивность, которая будет оценкой сверху. Если представляет собой полную мощность, излучаемую системой автоматического сканирования по одной из линий сканирования, тогда могут быть установлены следующие соотношения:
![]() . (Н.2)
. (Н.2)
Для систем ручного сканирования:
>усредненная по пространству и времени интенсивность.
Для систем автоматического сканирования:
Р/(площадь сканирования)>усредненная по пространству и времени интенсивность,
ширина сканирования>·общее число линий сканирования,
где - разделение линий сканирования (см. 3.72).
Здесь предполагается, что линии сканирования расположены на равном расстоянии друг от друга, но это не обязательно. Для некоторых типов преобразователей, таких как линейные решетки, ширина сканирования определена по прямой линии, параллельной поверхности линейной решетки, и не зависит от расстояния от поверхности, т.е. имеется прямолинейная геометрия сканирования. Для других преобразователей, таких как секторные датчики, ширина сканирования определена шириной сканирования на поверхности с центром в точке, лежащей, как правило, в теле преобразователя. В этом случае ширина сканирования зависит от расстояния, оговариваемого при указании значения .
Н.1.2 Импульсно-волновое диагностическое оборудование
Все импульсно-волновые диагностические приборы излучают акустические импульсы, а затем принимают и анализируют их после отражения или прохождения через озвучиваемую среду.
Акустическое излучение эхо-импульсного диагностического оборудования обычно представляет собой ультразвуковые импульсы с частотой акустического воздействия от 1 до 12 МГц, повторяющиеся с частотой от 1 до 5 кГц. Импульсы доплеровских приборов включают в себя, как правило, большое число колебаний и повторяются с частотой, сходной с частотой повторения импульсов в эхо-импульсных приборах или превышающей ее. В приборах обоих типов ультразвуковой пучок обычно сфокусирован на расстоянии от нескольких сантиметров до 20 см от преобразователя, причем пиковое акустическое давление в фокусе составляет от 0,2 до 10 МПа. Несмотря на то что сканеры с датчиками в виде линейных, секторных и фазированных решеток излучают последовательности импульсов вдоль различных линий ультразвукового сканирования, волновая форма акустических импульсов остается приблизительно постоянной.
Диаметр фокальной области эхо-импульсных приборов обычно меньше 3 мм, и, как показано в 5.1.6, для измерения их полей необходим гидрофон с диаметром активного элемента, составляющим приблизительно 0,5 мм, а также требуется соответствующая точность установки гидрофона в поле.
Высокие значения акустического давления определяют и значение параметра нелинейности распространения (см. 3.38), как правило, превышающее 0,5, что предъявляет повышенные требования к ширине полосы гидрофона и к точности его ориентации, если принять во внимание частотную зависимость характеристики направленности гидрофона. Важно поэтому своевременно корректировать ориентацию гидрофона, добиваясь максимального сигнала на нем в каждой точке его расположения (см. 5.2.2).
Испытания диагностического оборудования предъявляют наибольшие требования к частотной характеристике гидрофона и к точности систем его позиционирования. Наиболее подходящими будут мембранные или зондовые гидрофоны на основе ПВДФ (см. раздел В.9 приложения В). Необходимость применения широкополосных гидрофонов обоснована в [12], [66]-[68].
Измерения максимальных значений акустических параметров проводят в плоскости, соответствующей пространственному пику пикового акустического давления и расположенной вблизи фокуса преобразователя. На этих расстояниях, как правило, предполагают квадратичную зависимость интенсивности от давления, что позволяет вычислить соответствующие параметры интенсивности. Такое предположение допустимо, несмотря на погрешность, связанную с нелинейностью распространения ультразвуковой волны.
Н.1.3 Диагностические приборы с непрерывно-волновым излучением
Доплеровские системы непрерывной волны работают, как правило, в диапазоне частот от 2 до 10 МГц. Для фокусировки ультразвукового пучка на расстояниях до 8 см от преобразователя используют акустическую линзу. Иногда применяют активный элемент выпуклой формы, что затрудняет нахождение максимальных значений в какой-то заданной плоскости. Поскольку для приборов этого типа пиковые значения акустического давления, как правило, не превышают 0,1 МПа, то значение параметра нелинейности распространения составляет менее 0,5 и широкополосный гидрофон не используют.
В связи с тем, что диаметр фокальной области может быть менее 3 мм, то, как показано в 5.1.6, следует использовать гидрофон с активным элементом диаметром 0,5 мм или менее. При испытаниях высокочастотных приборов может потребоваться дополнительный поворот гидрофона, когда измерения проводят в точках, отстоящих от оси пучка на расстояниях, больших радиуса преобразователя.
Датчики частоты сердечных сокращений акушерских мониторов могут генерировать расходящийся ультразвуковой пучок, для которого пиковые значения акустического давления нередко находятся в плоскости, совпадающей с выходной поверхностью датчика. В этом случае допускаемая аппроксимация плоской бегущей волны неверна (см. 7.5.2). Следовательно, если не принято компромиссное решение, акустический выход таких датчиков можно описывать только параметрами акустического давления. Компромиссным решением будет, например, проведение измерений в плоскости, не содержащей максимальные (по пространству) значения пиковых давлений, но допускающей плосковолновую аппроксимацию, что позволит вычислять параметры интенсивности. С целью оценки разницы между истинным значением интенсивности и значением, полученным как квадрат акустического давления, может быть использован приведенный в [1] критерий для преобразователей поршневого типа, хотя это и не совсем верно для сфокусированных полей. Приемлемым компромиссом решения этой проблемы будет проведение измерений на расстоянии от ультразвукового преобразователя, составляющем один-два диаметра его активного элемента. Для преобразователя поршневого типа это приведет к погрешности, не превышающей 4 и 2% соответственно.
Н.2 Поля терапевтического назначения
Н.2.1 Аппараты для ультразвуковой терапии
Ультразвуковые преобразователи для физиотерапии, как правило, работают на частотах от 0,75 до 3 МГц в режиме непрерывной волны или тональных импульсов. Как правило, применяют преобразователи с активным элементом диаметром 20 мм, иногда имеющим акустическую линзу для корректировки излучаемого ультразвукового поля. Поле характеризуется акустическим давлением, не превышающим 0,5 МПа, с несущественными искажениями волновой формы в ближней зоне ультразвукового преобразователя.
Измерения акустических параметров могут быть проведены в любой плоскости, хотя, как правило, выполняют их в ближнем поле. При измерениях на расстояниях меньших, чем два диаметра преобразователя, возникают те же самые проблемы с пересчетом акустического давления в интенсивность, что и в доплеровских приборах непрерывной волны (см. Н.1.3). Таким образом, чтобы получить абсолютное значение интенсивности, рекомендуется проводить измерения на расстоянии, превышающем диаметр преобразователя.
Н.2.2 Аппараты для гипертермии
Этот пункт зарезервирован для описания оборудования для лечения сфокусированным ультразвуком высокой интенсивности (High Intensity Focused Ultrasound, HIFU), разрабатываемого в настоящее время.
Н.3 Поля хирургического назначения
Н.3.1 Литотриптеры
Методы измерения полей, генерируемых литотриптерами импульсов давления, изложены в стандарте IEC 61846.
Н.3.2 Низкочастотные хирургические аппараты
Специальные методы измерения полей, генерируемых низкочастотными хирургическими аппаратами, изложены в IEC 61847.
Приложение I
(справочное)
Оценка неопределенности результатов измерений акустических параметров с помощью гидрофонов
I.1 Общие положения
Для правильной интерпретации каждый результат измерения следует сопровождать указанием на неопределенность, с которой он получен. В 6.4.2 установлено, что при оценивании и выражении неопределенностей следует руководствоваться документом ISO GUM.
Составляющие неопределенности группируют в соответствии с тем, каким образом их оценивают:
- типа А - оцениваемые статистическими способами;
- типа В - оцениваемые иными способами.
I.2 Суммарная (расширенная) неопределенность
Суммарную неопределенность получают с учетом всех составляющих неопределенности.
При сложении источников неопределенности следует обратить внимание на те из них, значения которых выражены в децибелах. Перед сложением эти значения следует представить в линейной, а не в логарифмической форме. Окончательное значение расширенной неопределенности может быть выражено в абсолютных единицах, в процентах или переведено в децибелы.
Примечания
1 Использование децибельной шкалы для выражения неопределенности можно приводить к несимметричному распределению (например, плюс 1,5 дБ эквивалентно плюс 19%, а минус 1,5 дБ эквивалентно минус 16%);
2 Если каждая из составляющих неопределенности мала, например меньше 1 дБ, то суммарная неопределенность может быть вычислена в децибелах.
I.3 Распространенные источники неопределенности
Ниже приведен перечень наиболее распространенных источников неопределенности результатов измерений с использованием гидрофонов. Этот перечень не следует рассматривать как исчерпывающий, но он может быть полезен при оценивании неопределенности результатов измерений определенных требуемых параметров. В зависимости от измеряемого параметра некоторые из этих источников (возможно, и не все) будет необходимо оценить. Например, неопределенности, связанные с измерительным прибором, можно минимизировать, если все сигналы измерять одним и тем же измерительным каналом и представлять результаты в виде амплитудных отношений. Но такой случай применим не всегда, поэтому в перечень включены и составляющие этих источников неопределенности.
Ниже приведены различные потенциальные источники неопределенности результатов измерений.
Источники неопределенности, связанные с измерительным баком и системой позиционирования:
- установка гидрофона по максимальному значению принимаемого им сигнала;
- разъюстировка, в частности на высоких частотах, где направленность гидрофона может быть особенно неравномерной; интерференция с отраженными сигналами, приводящая к нарушению условий свободного поля;
- акустическое рассеяние от держателя гидрофона (или вибрации, улавливаемые держателем и передающиеся к гидрофону);
- прилипание воздушных пузырьков к преобразователю и/или гидрофону; их влияние рекомендуется уменьшать предварительным смачиванием преобразователей и гидрофонов;
- кавитационные пузырьки и частички пыли в воде;
- измерение окружающих условий в процессе измерений (например, температуры, глубины, усилий закрепления гидрофона и пр.);
- погрешность измерения расстояний (до гидрофона).
Источники неопределенности, связанные с измерением сигналов:
- наличие электрического шума в сигнале с гидрофона, в том числе и наведенного радиочастотного сигнала;
- неточность учета поправки на электрическую нагрузку кабеля и предварительного усилителя;
- погрешности используемых аттенюаторов;
- погрешности, связанные с плохой линейностью измерительной системы (их вклад можно существенно снизить применением калиброванного аттенюатора);
- погрешности калибровки используемых усилителей, фильтров и других цифровых измерительных устройств;
- погрешность измерения напряжения (включая погрешности измерительных приборов - вольтметра, АЦП и пр.);
- погрешность, связанная с разрядностью АЦП;
- погрешности, связанные с выбором времени измерения.
Источники неопределенности, относящиеся к измеряемому ультразвуковому полю:
- перекрытие линий акустического сканирования;
- неидентичность линий сканирования;
- неустойчивость измеряемого поля;
- погрешность измерения акустической частоты;
- погрешность определения плотности воды;
- кратковременные изменения температуры между измерениями;
- нестабильность ультразвукового преобразователя (т.е. нестабильность - напряжения его возбуждения или излучаемого им акустического сигнала);
- погрешность калибровки гидрофона;
- нестабильность характеристик гидрофона;
- зависимость чувствительности гидрофона от температуры;
- наличие нелинейных искажений в среде распространения;
- влияние эффектов пространственного усреднения из-за конечных размеров гидрофона.
Приложение J
(справочное)
Системы позиционирования преобразователя и гидрофона
Существует много способов установки ультразвукового преобразователя и гидрофона в ультразвуковом поле, соответствующих требованиям подраздела 5.2. Одна из возможных реализаций этих требований схематично показана на рисунке J.1.
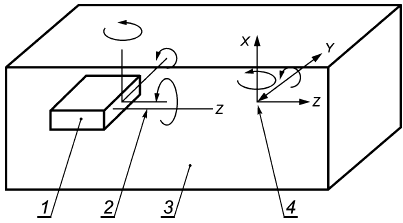
1 - ультразвуковой преобразователь (линейная решетка); 2 - ось пучка; 3 - измерительный бак; 4 - активный элемент гидрофона; х, у и z - направления осей относительно установленных преобразователя и гидрофона
Рисунок J.1 - Схематичное изображение степеней свободы ультразвукового преобразователя и гидрофона
Приложение K
(справочное)
Метод определения средних точек по ширине пучка
В этом методе, разработанном Нидерландским институтом TNO в Лейдене, используют ортогональное линейное сканирование, а значения квадратного корня из интеграла квадратов давления в импульсе делят на 20 интервалов, соответствующих уровням от минус 0,1 до минус 26 дБ (см. таблицу К.1).
Значения ширины пучка вычисляют по настолько большому числу уровней, приведенных в таблице в децибелах, насколько это позволяет уровень измеренного сигнала, а затем положения их центров усредняют для получения средних точек как по оси х, так и по оси у. Пересечение линии, перпендикулярной к линии сканирования, и линии, проходящей через средние точки, определяет центральную точку пучка.
В таблице К.1 ppsi обозначает интеграл квадратов давления в импульсе, a SQRT - квадратный корень.
Таблица K.1 - Уровни ширины пучка, дБ, для определения средних точек
Нормированный SQRT (ppsi). Линейные значения | Нормированный ppsi. Линейные значения | Уровни, дБ |
0,9885 | 0,9771 | -0,1006 |
0,95 | 0,9025 | -0,4455 |
0,9 | 0,8100 | -0,9151 |
0,85 | 0,7225 | -1,4116 |
0,8 | 0,6400 | -1,9382 |
0,75 | 0,5625 | -2,4988 |
0,7 | 0,4900 | -3,0980 |
0,65 | 0,4225 | -3,7417 |
0,6 | 0,3600 | -4,4370 |
0,55 | 0,3025 | -5,1927 |
0,5 | 0,2500 | -6,0206 |
0,45 | 0,2025 | -6,9357 |
0,4 | 0,1600 | -7,9588 |
0,35 | 0,1225 | -9,1186 |
0,3 | 0,0900 | -10,4576 |
0,25 | 0,0625 | -12,0412 |
0,2 | 0,0400 | -13,9794 |
0,15 | 0,0225 | -16,4782 |
0,1 | 0,0100 | -20,0000 |
0,05 | 0,0025 | -26,0206 |
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO/IEC Guide 98-3:2008 | - | * |
_______________
| ||
ISO 16269-6:2005 | - | * |
_______________
| ||
IEC 60050-801:1994 | - | * |
IEC 60565:2006 | - | * |
IEC 60854:1986 | - | * |
IEC 61689:2007 | IDT | ГОСТ IEC 61689-2016 "Государственная система обеспечения единства измерений. Аппараты для ультразвуковой терапии. Общие требования к методикам измерения параметров акустического выхода в диапазоне частот от 0,5 до 5,0 МГц"** |
IEC 61828:2006 | - | * |
_______________
| ||
IEC 61846:1998 | - | * |
_______________
| ||
IEC 61847:1998 | - | * |
IEC 62127-2:2007 | - | * |
IEC 62127-3:2007 | - | * |
_______________
| ||
* Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Официальный перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. ** Стандарт идентичен стандарту IEC 61689:2013. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | Radulescu E.G., Lewin P.A., Nowicki A. and Berger W.A. Hydrophones' effective diameter measurements as a quasi-continuous function of frequency. Ultrasonics, 2003, vol.41 iss.8, p.635-641 |
[2] | Bacon D.R. Finite amplitude distortion of the pulsed fields used in diagnostic ultrasound. Ultrasound Med. Biol., 1984, vol.10, no.2, p.189-195 |
[3] | ISO/IEC Guide 98-3:2008 Uncertainty of measurement - Part 3: Guide to the expression of uncertainty in measurement (GUM:1995) |
[4] | Beissner K. Maximum hydrophone size in ultrasonic field measurements. Acustica, 1985, vol.59, p.61-66 |
[5] | Harris G.R. Transient field of a baffled planar piston having an arbitrary vibration amplitude distribution. J.Acoust. Soc. Am., 1981, vol.70, p.186-204 |
[6] | Fay B. Numerische Berechnung der Beugungsverluste im Schallfeld von Ultraschallwandlern. Acustica, 1976, vol.36, p.209-213 |
[7] | Khimunin A.S. On the ultrasound diffraction losses for circular transducers of different radii. Acustica, 1983, vol.54, p.13-22 |
[8] | Harris G.R. A model of the effects of hydrophone and amplifier frequency response on ultrasound exposure measurements. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., September 1991, vol.38, iss.5, p.413-417 |
[9] | Harris G.R. Are current hydrophone low frequency response standards acceptable for measuring mechanical/cavitation indices? Ultrasonics, 1996, vol.34, iss.6, p.649-654 |
[10] | Lewin P.A., Schafer M.E. and Chivers R.C. Factors affecting the choice of preamplification for ultrasonic hydrophone probes. Ultrasound Med.Biol., March 1987, vol.13, no.3, p.141-148 |
[11] | Preston R.C., Bacon D.R., Livett A.J. and Rajendran K. PVDF membrane hydrophone performance properties and their relevance to the measurement of the acoustic output of medical ultrasonic equipment. J.Phys. E: Sci. Instrum., 1983, vol.16, p.786-796 |
[12] | Smith R.A. The importance of the frequency response of a hydrophone when characterising medical ultrasonic fields. Proc. Inst. Acoustics, 1986, vol.8, Part 2, p.119-128 |
[13] | Lewin P.A. Calibration of Hydrophones. Technical Rewiew, |
________________ | |
[14] | Preston R.C., Bacon D.R. and Smith R.A. Calibration of medical ultrasonic equipment - procedures and accuracy assessment. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 1988, vol.35, iss.2, p.110-121 |
[15] | Harris G.R. Hydrophone measurements in diagnostic ultrasound fields. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 1988, vol.35, iss.2, p.87-101 |
[16] | Shombert D.G. and Harris G.R. Use of miniature hydrophone to determine peak intensities typical of medical ultrasound devices. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., May 1986, vol.33, iss.3, p.287-294 |
[17] | AIUM/NEMA. Acoustic output measurement standard for diagnostic ultrasound equipment. (NEMA Standards Publication UD 2-2004, Revision 3). Laurel, MD: American Institute of Ultrasound in Medicine (AIUM); Rosslyn, VA: National Electrical Manufacturers Association (NEMA), 2004 |
[18] | Zeqiri B. and Bond A.D. The influence of waveform distortion on hydrophone spatial-averaging corrections - Theory and measurement. J.Acoust. Soc. Am., 1992, vol.92, p.1809-1821 |
[19] | EC Community Bureau of Reference (BCR). Development of standard measurement methods for essential properties of ultrasound therapy equipment (TNO Report CMT/92.031). Leiden, The Netherlands: Centre for Medical Technology, 1992 |
[20] | Hekkenberg R.T., Reibold R. and Zeqiri B. Development of standard measurement methods for essential properties of ultrasound therapy equipment. Ultrasound Med.Biol., 1994, vol.20, no.1, p.83-98 |
[21] | Staundenraus J. and Eisenmenger W. Fiber-optic hydrophone for ultrasonic and shockwave measurements in water. Ultrasonics, 1993, vol.31, iss.4, p.267-273 |
[22] | Wilkens V. and Koch C. Amplitude and phase calibration of hydrophones up to 70 MHz using broadband pulse excitation and an optical reference hydrophone. J.Acoust. Soc.Am., 2004, vol.115, p.2892-2903 |
[23] | Lewin P.A. Umchid S., Sutin A. and Sarvazyan A. Beyond 40 MHz frontier: the future technologies for calibration and sensing of acoustic fields. J.Phys.: Conf.Ser., 2004, vol.1, p.38-43 |
[24] | Lewin P.A. and Chivers R.C. Two miniature ceramic ultrasonic probes. J.Phys. E: Sci. Instrum., 1981, vol.14, p.1420-1424 |
[25] | Shombert D.G., Smith S.W. and Harris G.R. Angular response of miniature ultrasonic hydrophones. Med. Physics, July-August 1982, vol.9, no.4, p.484-492 |
[26] | Lewin P.A. Miniature piezoelectric polymer ultrasonic hydrophone probes. Ultrasonics, September 1981, vol.19, iss.5, p.213-216 |
[27] | Wilson D.T., Tancrell R.H. and Callerame J. PVF2 polymer microprobe. Proceedings of the IEEE Ultrasonics Symposium, 1979, p.506-510 |
[28] | Bacon D.R. Characteristics of a PVDF membrane hydrophone for use in the range 1-100 MHz. IEEE Transactions on Sonics and Ultrasonics, January 1982, vol.SU-29, no.1, p.18-25 |
[29] | Dereggi A.S., Roth S.G., Kenney J.M., Edelman S. and Harris G.R. Piezoelectric polymer probe for ultrasonic applications. J.Acoust. Soc. Am., 1981, vol.69, p.853-859 |
[30] | Ueberle F. Shockwave Measurements Using an Optical Light Spot Hydrophone. BMT Conference Proceedings, Zurich, September 2006 |
[31] | Granz B., Nanke R., Fehre J., Pfister T. and Engelbrecht R. Light Spot Hydrophone, Innovation in Lithotripsy. Medical Solutions, June 2004, p.86-87 |
[32] | Koch C. and Reibold R. Interferometric fiber-optic sensor for measurement of lithotripter shock waves. Proceedings in the 1995 World Congress on Ultrasonics, 1995, p.931-934, ISBN 3-9805013-0-2 |
[33] | Koch C. Measurement of ultrasonic pressure by heterodyne interferometry with a fiber-tip sensor. Appl. Optics, May 1999, vol.38, iss.13, p.2812-2819 |
[34] | Koch C., Molkenstruck W. and Reibold R. Shock-wave measurement using a calibrated interferometric fiber-tip sensor. Ultrasound Med.Biol., 1997, vol.23, iss.8, p.1259-1266 |
[35] | Beard P.C. and T.N. Extrinsic optical-fiber ultrasound sensor using a thin polymer film as a low-finesse Fabry-Perot interferometer. Appl. Optics, February 1996, vol.35, iss.4, p.663-675 |
[36] | Koch C. Coated fiber-optic hydrophone for ultrasonic measurement. Ultrasonics, August 1996, vol.34, iss.6, p.687-689 |
[37] | Coleman A.J., Draguioti E., Tiptaf R., Shotri N. and Saunders J.E. Acoustic performance and clinical use of a fibre-optic hydrophone. Ultrasound Med. Biol., January 1998, vol.24, iss.1, p.143-151 |
[38] | Uno Y. and Nakamura K. Pressure sensitivity of a fibre-optic microprobe for high frequency ultrasonic field. Jpn.J. Appl. Phys., 1999, vol.38, p.3120-3123 |
[39] | Beard P.C., Perennes F. and Mills T.N. Transduction mechanisms of the Fabry-Perot polymer film sensing concept for wideband ultrasound detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., November 1999, vol.46, iss.6, p.1575-1582 |
[40] | Beard P.C., Hurrell A.M. and Mills T.N. Characterization of a polymer film optical fiber hydrophone for use in the range 1 to 20 MHz: A comparison with PVDF needle and membrane hydrophones. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., January 2000, vol.47, iss.1, p.256-264 |
[41] | Wurster C., Kohler M., Pech R., Eisenmenger W., Suhr D., Irmer U., Brummer F. and Hulser D. Negative pressure measurements of water using the glass fiber optic hydrophone. Proceedings of the 1995 World Congress on Ultrasonics. 1995, p.635-698. ISBN 3-9805013-0-2 |
[42] | Wang Z.Q., Lauxmann P, Wurster C., Kohler M., Gompf B. and Eisenmenger W. Impulse response of fiber optic probe hydrophone determined with shock waves in water. J.Appl. Phys., March 1999, vol.85, iss.5, p.2514-2516 |
[43] | Krucker J.F., Eisenberg A., Krix M., Lotsch R., Pessel M. and Trier H. Rigid piston approximation for computing the transfer function and angular response of a fiber-optic hydrophone. J.Acoust. Soc. Am., 2000, vol.107, p.1994-2003 |
[44] | Weise W., Wilkens V. and Koch C. Frequency response of fiber-optic multi-layer hydrophones: experimental investigation and finite element simulation. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., July 2002, vol.49, iss.7, p.937-945 |
[45] | Wilkens V. and Koch C. Optical multilayer detection array for fast ultrasonic field mapping. Opt. Lett., 1999, vol.24, p.1026-1028 |
[46] | Beard P.C. Two-dimensional ultrasound receive array using an angle-tuned Fabry-Perot Polymer film sensor for transducer field characterization and transmission ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., 2005, vol.52, p.1002-1012 |
[47] | Wilkens V. Characterization of an optical multilayer hydrophone with constant frequency response in the range from 1 to 75 MHz. J.Acoust. Soc. Am., 2003, vol.113, p.1431-1438 |
[48] | Beissner K. The influence of membrane reflections on ultrasonic power measurements. Acustica, 1982, vol.50, p.194-200 |
[49] | Lewin P.A. and Schafer M.E. Ultrasonc probes in measurement practice. Medical Device and Diagnostic Industry, 1986, vol.8, no.5, p.40-45 |
[50] | Beissner K. On the plane-wave approximation of acoustic intensity. J.Acoust. Soc. Am., 1982, vol.50, p.194-200 |
[51] | Kaye G.W.C. and Laby T.H. Tables of Physical and Chemical Constants and Some Mathematical Functions. 14 |
[52] | Koch C. Amplitude and phase calibration of hydrophones by heterodyne and time-gated time-delay spectrometry. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 2003, vol.50, iss.3, p.344-348 |
[53] | Oran Brigham E. The Fast Fourier Transform and its Applications. Prentice Hall, 1988. ISBN 0-13-307547-8 |
[54] | Preston R.C., Bacon D.R. and Smith R.A. Calibration of medical ultrasonic equipment - procedures and accuracy assessment. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 1988, vol.35, iss.2, p.110-121 |
[55] | Smith R.A. Are hydrophones of diameter 0,5 mm small enough to characterise diagnostic ultrasound equipment? Phys. Med. Biol., 1989, vol.34, p.1593-1607 |
[56] | Selfridge A. and Lewin P.A. Wideband Spherically Focused PDVF Acoustic Sources for Calibration of Ultrasound Hydrophone Probes. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., November 2000, vol.47, iss.6, p.1372-1376 |
[57] | Radulescu E.G., Lewin P.A., Goldstein A. and Nowicki A. Hydrophone spatial averaging corrections from 1-40 MHz. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., November 2001, vol.48, iss.6, p.1575-1580 |
[58] | Radulescu E.G., Wojcik J., Lewin P.A. and Nowicki A. Nonlinear propagation model for ultrasound hydrophones calibration in the frequency range up to 100 MHz. Ultrasonics, June 2003, vol.41, iss.4, p.239-245 |
[59] | Radulescu E.G., Lewin P.A. and Nowicki A. 1-60 MHz Measurements in Focused Acoustic Fields using Spatial Averaging Corrections. Ultrasonics, May 2002, vol.40, iss.1-8, p.497-501 |
[60] | Lewin P.A., Barrie-Smith N., Hynynen K., Ide M. and MacDonald M. Interlaboratory Acoustic Power Measurement. J.Ultrasound in Medicine, 2003, vol.22, p.207-213 |
[61] | Radulescu E.G., Lewin P.A., Wojcik J. and Nowicki A. A Calibration of ultrasonic hydrophone probes up to 100 MHz using time gating frequency analysis and finite amplitude waves. Ultrasonics, June 2003, vol.41, iss.4, p.247-254 |
[62] | Smith R.A. The evaluation of small area hydrophones [NPL Report RSA(EXT)2]. Teddington, Middlesex, UK: National Physical Laboratory, 1989 |
[63] | Hekkenberg R.T., Beissner K., Zeqiri B., Bezemer R.A. and Hodnett M. Validated ultrasonic power measurements up to 20 W. Ultrasound Med. Biol., 2001, vol.27, no.3, p.427-438 |
[64] | Hekkenberg R.T., Beissner K. and Zeqiri B. Therapy-level ultrasonic power measurement. Final Technical Report. EC project SMT4-CT96-2139, European Commission report EUR 19510, 2000. ISBN 92-828-9027-9 |
[65] | Hekkenberg R.T., Beissner K. and Zeqiri B. Guidance on propagation medium and degassing for ultrasonic power measurements in the range of physiotherapy-level ultrasonic power. EC project SMT4-CT96-2139, European Commission report EUR 19511, 2000. ISBN 92-828-9838-5. |
[66] | Radulescu E.G., Lewin P.A., Wojcik J. and Nowicki A. Probing acoustic fields of clinically relevant transducers: the effect of hydrophone probes' finite apertures and bandwidths. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., October 2004, vol.51, iss.10, p.1262-1270 |
[67] | Duck F.A. and Starritt H.C. Acoustic shock generation by ultrasonic imaging equipment. Brit. J. Radiol., 1984, vol.57, p.231-240 |
[68] | Hekkenberg R.T., Oosterbaan W.A., McCarty K. and Mead D. Acoustic output and related performance of 5 duplex scanners: ATL UM-9, ESAOTE SIM 5000, HITACHI EUB-450, QUANTUM QAD-PV, VINGMED CFM-700. Report: MTD/90.033, June 2990/ |
Дополнение: документы IEC, касающиеся настоящего стандарта
[69] | IEC 60469-1:1987 | Pulse techniques and apparatus - Part 1: Pulse terms and definitions (Импульсная техника и аппаратура. Часть 1: Термины и определения импульсов) |
[70] | IEC 60601-2-37 | Medical electrical equipment - Part 2-37: Particular requirements for the safety of ultrasonic medical diagnostic and monitoring equipment (Медицинское электрическое оборудование. Часть 2-37. Частные требования безопасности для приборов ультразвуковой диагностики и исследований) |
[71] | IEC 61161:2006 | Ultrasonics - Power measurement - Radiation force balances and performance requirements (Ультразвук. Измерения мощности. Системы уравновешивания радиационной силы и требования к их характеристикам) |
УДК 616-073.43-71:006.354 | МКС 17.140.50 | IDT | |
Ключевые слова: акустическое давление, интенсивность, медицинское диагностическое ультразвуковое оборудование, мощность ультразвука, ультразвуковой преобразователь, ультразвуковой пучок | |||
Электронный текст документа
и сверен по:
, 2016
{kind=link}