ГОСТ Р ИСО 20283-4-2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
ИЗМЕРЕНИЯ ВИБРАЦИИ НА СУДАХ
Часть 4
Измерения и оценка вибрации судовой пропульсивной установки
Mechanical vibration. Measurement of vibration on ships. Part 4. Measurement and evaluation of vibration of the ship propulsion machinery
ОКС 17.140.30
47.020.01
Дата введения 2018-06-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 18 октября 2017 г. N 1445-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 20283-4:2012* "Вибрация. Измерения вибрации на судах. Часть 4. Измерения и оценка вибрации судовой пропульсивной установки" (ISO 20283-4:2012 "Mechanical vibration - Measurement of vibration on ships - Part 4: Measurement and evaluation of vibration of the ship propulsion machinery", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Март 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Классификационные общества запрашивают результаты расчетов крутильных колебаний пропульсивной установки морского судна на стадии его проектирования в целях одобрения конструкции судна. В зависимости от результатов расчетов и типа пропульсивной установки для подтверждения полученных значений могут потребоваться дальнейшие исследования. Критерии оценки крутильных колебаний в явном виде установлены правилами международных классификационных обществ, а также в виде унифицированных требований Международной ассоциацией классификационных обществ (IACS), в частности в документе IACS UR М68 ([10]), где основное внимание уделено компонентам, таким как валы, зубчатые передачи, соединительные муфты, передающим крутящий момент. Требование к проведению исследований изгибных или осевых колебаний валопровода может быть выдвинуто классификационными обществами только в особых случаях, когда это диктуют конструктивные особенности судового оборудования.
Вибрация пропульсивной установки, вызываемая двигателем или гребным винтом, может достигать очень высокого уровня. В дополнение к числовым предельным значениям крутильных колебаний могут быть установлены дополнительные требования к конструкции системы, например ограничивающие переменный крутящий момент валопровода. В общем случае конструкция валопровода может допускать функционирование при наличии значительной переменной составляющей, однако указанный запрет может исходить из желания владельцев судна или управляющей компании обеспечить плавную работу движителя.
Пользователи настоящего стандарта должны иметь в виду, что для оценки результатов измерений вибрации пропульсивной установки им следует руководствоваться требованиями последних редакций унифицированных требований IACS. В Российской Федерации эти требования учтены в "Правилах классификации и постройки морских судов" Российского морского регистра судоходства.
1 Область применения
Настоящий стандарт устанавливает методы проведения измерений и обработки их результатов для получения достоверных данных о вибрации пропульсивных установок морских и речных судов. Методы измерений применимы к разным видам привода (от дизельного двигателя, электродвигателя или турбины) с учетом ограничений на них.
Методы настоящего стандарта распространяются на вибрацию в установившемся режиме работы судового оборудования. Их в общем случае не следует применять к анализу переходных, быстропеременных и ударных процессов.
Методы измерений, установленные настоящим стандартом, распространяются преимущественно на определение вибрации главной энергетической установки в процессе ходовых испытаний. Те же самые или аналогичные процедуры могут быть использованы в задачах, например, контроля эксплуатационных характеристик, исследования причин повышенной вибрации или состояния элементов оборудования после ремонта. Однако при этом данные процедуры могут потребовать модификации под требования конкретных задач.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ISO 2041, Mechanical vibration, shock and condition monitoring - Vocabulary (Вибрация, удар и контроль состояния. Словарь)
3 Термины и определения
В настоящем стандарте применены термины по ИСО 2041, а также следующие термины с соответствующими определениями.
3.1 свободное движение (судна) (free route): Условия движения судна с постоянной скоростью и постоянным курсом в пределах перекладки руля на левый и на правый борт 2° без изменения положения органа управления подачей топлива.
[ИСО 20283-2:2008, статья 3.3]
3.2 жесткость вибрации (vibration severity): Значения параметра или совокупности параметров, характеризующих вибрацию.
[ИСО 2041:2009, статья 2.51]
Примечание 1 - Жесткость вибрации - обобщающее понятие. Применительно к вибрации, создаваемой машинами, вместо него чаще используют термин "вибрационное состояние". В прошлом вибрационное состояние машины описывалось через параметры скорости, однако в настоящее время более распространенным является его описание через другие величины, такие как перемещение и ускорение.
________________
В настоящем стандарте по аналогии с другими стандартами, посвященными контролю вибрации машин, использован термин "вибрационное состояние".
3.3 пиковое значение (peak value): Максимальное значение величины на заданном интервале времени.
[ИСО 2041:2009, статья 2.44]
Примечание 1 - Под пиковым значением обычно понимают максимальное отклонение величины, описывающей вибрацию, от среднего значения. Максимальное (по модулю) отклонение в область положительных значений называют положительным пиковым значением, а в область отрицательных значений - отрицательным пиковым значением (см. рисунок 1).
Примечание 2 - Поскольку модули положительного и отрицательного пиковых значений для сигналов вибрации могут быть разными, под пиковым значением часто понимают половину размаха (см. 3.4).
3.4 размах (peak-to-peak value): Разность между положительным и отрицательным пиковыми значениями на заданном интервале времени.
[ИСО 2041:2009, статья 2.45]
Примечание - См. рисунок 1.
|
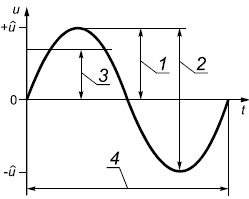
1 - пиковое значение ; 2 - размах (от -
до +
); 3 - среднеквадратическое значение (с.к.з.); 4 - период
Рисунок 1 - Соотношение между параметрами вибрации для гармонического сигнала u(t)
3.5 среднеквадратическое значение (r.m.s. value): Корень квадратный из суммы квадратов эффективных значений гармоник Фурье-преобразования сигнала вибрации в заданной полосе частот
Пример 1 - Во временной области среднеквадратическое значение сигнала u(t) на интервале времени от до
получают по формуле
 (см. рисунок 1).
(см. рисунок 1).
Пример 2 - В частотной области среднеквадратическое значение сигнала, спектр которого включает в себя N линий с амплитудами , n=1, ..., N, получают по формуле
 .
.
Примечание 1 - Формулировка данного определения основана на более общем определении спектра (ИСО 2041, статья 5.11) его адаптации к сигналам вибрации.
Примечание 2 - В случае гармонического сигнала отношение пикового значения к среднеквадратическому значению равно .
Примечание 3 - На практике в случае сигналов сложной формы и обработки их с помощью анализатора спектра представляет собой амплитуду узкополосного сигнала. Для улучшения качества сигнала (защиты от утечек спектра) применяют весовые (оконные) функции, требующие введения коэффициента В, с учетом которого формула для среднеквадратического значения приобретает вид
 . В зависимости от вида окна коэффициент В приобретает разные значения: В=1,5 для окна Ханна, В=3,77 для плосковершинного окна (при отсутствии окна В=1).
. В зависимости от вида окна коэффициент В приобретает разные значения: В=1,5 для окна Ханна, В=3,77 для плосковершинного окна (при отсутствии окна В=1).
4 Вибрационные испытания
4.1 Средства измерений
Преобразователи, устройства формирования сигнала и система записи должны обеспечивать проведение измерений в диапазоне частот, соответствующем измеряемому параметру вибрации с погрешностью, не превышающей ±10%. Диапазон частот измерений должны определить заинтересованные стороны, в качестве которых могут выступать судостроитель, владелец судна, классификационное общество и поставщик движителя. Как правило, для целей настоящего стандарта измерения поступательной вибрации достаточно проводить в диапазоне частот до 1000 Гц. Измерения сил или моментов сил или других величин на вращающихся частях энергетической установки достаточно проводить в диапазоне частот до 100 Гц для малооборотных двухтактных двигателей и до 400 Гц для четырехтактных двигателей (для четырехтактных двигателей верхняя граница должна быть не меньше произведения частоты вращения вала на число цилиндров). При измерениях ускорения на зубчатом редукторе верхняя граница диапазона частот может быть выше и зависит от частот зацепления зубьев.
С учетом возможной необходимости воспроизведения исходных и преобразованных сигналов в целях последующего анализа их предпочтительно записывать в электронном виде (аналоговом или цифровом). Передаточная функция измерительной цепи от преобразователя до устройств записи и воспроизведения должна быть известна и подтверждена на месте проведения измерений или в лаборатории.
Рекомендуется сохранять информацию о фазе вибрации относительно некоторого опорного значения, привязанного к источнику возбуждения. Как правило, опорное значение определяют с помощью маркера, указывающего на фазу цикла двигателя (например, нахождение поршня в верхней мертвой точке цилиндра N 1), но в некоторых особых случаях также важно знать фазу сигнала относительно углового положения гребного винта.
4.2 Условия испытаний
Для обеспечения повторяемости результатов испытаний в целях определения вибрационных характеристик судовой установки их проводят в установившемся режиме работы при следующих условиях:
a) условия нагружения судовой установки во время испытаний максимально близки к номинальным как минимум в части балласта, определенного для ходовых испытаний, и полного погружения гребного винта;
b) глубина воды не менее чем в пять раз превышает осадку судна. Любые отклонения от этого требования должны быть согласованы сторонами и отражены в протоколе испытаний;
c) судно совершает свободное движение;
d) отсутствуют сильные удары встречных волн, а максимальное волнение равно:
- 1 балл для маломерных судов,
- 2 балла для малых кораблей (длиной менее 100 м),
- 3 балла для крупных кораблей (длиной не менее 100 м);
e) двигатель работает в нормальном режиме. Для некоторых видов измерений и некоторых судовых установок по согласованию сторон проводят дополнительные измерения в режиме работы двигателя отличном от нормального;
f) для установок более сложной конструкции, включающей в себя несколько двигателей, перед проведением измерений подлежащие исследованиям режимы работы должны быть согласованы сторонами. При этом может оказаться необходимым соблюсти требования классификационных обществ (например, проводить измерения крутильных колебаний в режимах работы с одним и двумя двигателями, если эти двигатели работают на одном валу, или измерения в нормальном и аварийном режимах для установок со знаком резервирования).
4.3 Правила проведения испытаний
4.3.1 Общие положения
Каждый измерительный канал проверяют на надежность соединений и правильность работы. Тензометрические датчики обычно калибруют после их установки на месте электрическим сигналом.
Если сторонами согласовано одновременное измерение механических колебаний разных видов (крутильных, изгибных, осевых, поперечных), то рекомендуется либо использовать технику синхронного многоканального хранения данных, либо сохранять данные о фазе измерения в каждом канале.
4.3.2 Измерения в установившемся режиме
Сбор данных в установившемся режиме в условиях, указанных в 4.2, осуществляют одним из следующих способов.
a) Фиксируют результаты измерений в режиме с постоянной частотой вращения, ступенчато изменяя ее с равным шагом по всему диапазону изменений от минимального до номинального (максимального) значения. Число шагов должно быть таким, чтобы позволить провести запись вибрации с заданной точностью. В качестве общего руководства рекомендуется изменять частоты вращения с шагом приблизительно 5% ширины всего диапазона ее изменения, уменьшая значение шага или переходя к плавному изменению частоты вращения [см. перечисление b)] в окрестностях резонансов.
b) Измерения выполняют с медленным постоянным нарастанием частоты вращения по всему диапазону от минимального до номинального (максимального) значения. Скорость изменения должна быть достаточно медленной, чтобы обеспечить измерения установившихся значений параметров вибрации. В ряде особых случаев измерения выполняют при постепенном уменьшении частоты вращения, хотя максимальное возбуждение, как правило, наблюдают при ее нарастании. В качестве общей рекомендации можно предложить изменять частоту вращения со скоростью менее 2% ее номинального значения в минуту, что соответствует общей длительности измерения при разгоне (выбеге) для двухтактного двигателя на одном валу около 30 мин. Для средне- и высокооборотных четырехтактных двигателей рекомендуется изменять частоту вращения со скоростью менее 15% номинального значения в минуту, что соответствует длительности измерения около 10 мин.
Изменения частоты вращения вала двигателя и движения судна рекомендуется осуществлять таким образом, чтобы винтовая характеристика двигателя соответствовала зависимости скорости движения судна от потребляемой мощности.
В ряде случаев измерения проводят при маневрировании судна или в переходных режимах (см. приложение А).
4.4 Обработка данных
4.4.1 Общие положения
Данные рекомендуется представлять в виде частотного либо порядкового спектра. Обычно для получения разрешения хорошего качества считают достаточным 400 линий в спектре и применение окна Ханна (хэннинг), однако в ряде случаев может потребоваться индивидуальный подбор параметров преобразования сигнала для получения лучшего разрешение по амплитуде или частоте (например, 1600 спектральных линий в диапазоне до 1 кГц с применением плосковершинного окна).
Спектры усредняют по длине записи сигнала. Их используют для анализа изменений основных гармонических составляющих, связанных с частотой вращения вала (основные гармоники в вибрации главного двигателя, лопастные гармоники), с изменением этой частоты. Альтернативным вариантом является применение следящей фильтрации сигнала вибрации.
Порядковый анализ представляет собой процедуру согласования периодического сигнала с изменением цикла работы машины (циклом возбуждения вибрации). Так, этот цикл будет представлять собой один оборот вала для двухтактного двигателя и два оборота вала для четырехтактного двигателя. Получение зависимости порядкового спектра от частоты вращения вала обычно не требует применения окон и высокого спектрального разрешения.
4.4.2 Вибрационное состояние
Вибрационное состояние судовой установки характеризуется набором измеряемых параметров (см. 4.4.3), которые должны быть выражены в виде пикового или среднеквадратичного значения в зависимости от параметра.
Обычно для измерений на постоянной частоте вращения вала используют технику быстрого преобразования Фурье (БПФ) с усреднением, а на переменной скорости - без усреднения.
Диапазон частотного или порядкового анализа может быть ограничен в зависимости от измеряемого параметра. Если предполагается осуществлять дополнительную фильтрацию сигнала после его записи (например, для очистки от нежелательных помех), то это должно быть согласовано сторонами. В таком случае параметры вибрационного состояния получают после фильтрации нежелательных частотных составляющих (гармоник). При этом если параметр оценивают через его пиковое значение, то при фильтрации должны быть сохранены фазовые соотношения.
4.4.3 Измеряемые параметры
При измерениях параметров, определяющих динамическое поведение вращающихся частей (например, переменного крутящего момента или тяги движителя, переменного напряжения крутильных или изгибных колебаний) получают и графически отображают пиковое значение величины за цикл работы машины. Эти величины могут быть выражены через их абсолютное значение или в виде процентной доли номинального значения. Также на график могут быть добавлены средние значения величин, что позволяет обнаруживать появление реверса двигателя.
Примечание - Если переменная составляющая тяги превышает среднюю тягу, то наблюдают изменение направления тяги от носа к корме судна. Аналогично, при превышении переменной составляющей крутящего момента валопровода установки с зубчатой передачи его среднего значения наблюдается слышимый удар зубьев передачи. Возможности таких режимов работы машины рассматриваются на стадии утверждения проекта. Реверсные нагрузки могут быть допустимы, особенно в диапазоне низких скоростей работы двигателя.
Для поступательной вибрации (на стационарных частях установки, перечисленных в 4.5.5) обычно измеряют среднеквадратичное значение сигнала скорости или ускорения на основе БПФ. Ценную дополнительную информацию могут дать также пики в спектре сигнала.
Включение в перечень измеряемых параметров амплитуд основных гармоник (вала, лопастной частоты) и наблюдение за их изменением с изменением частоты вращения вала помогает выявлять резонансы судовой установки.
4.5 Измерения
4.5.1 Общие положения
Объем измерений является предметом соглашения сторон.
Результаты некоторых измерений не могут быть использованы непосредственно в целях оценки вибрационного состояния и нуждаются в обработке с использованием некоторых математических моделей. Применение таких моделей также должно быть согласовано сторонами.
4.5.2 Измерения крутильных колебаний валопровода
Характеристики крутильных колебаний перед тем, как подтвердить в результате измерений, обычно рассчитывают с помощью теоретической модели валопровода. Результаты этих расчетов должны быть согласованы заинтересованными сторонами (классификационным обществом, судостроителем, судовладельцем, консультантами и т.п.).
Измерения проводят в точках, которые обеспечивают максимальную информацию о всех существенных модах вибрации. Результаты измерений должны быть преобразованы в контролируемые параметры, такие как крутящий момент или механические напряжения, связанные с крутильными колебаниями, в разных элементах судовой установки, с использованием соответствующей модели крутильных колебаний. Обычно переменный крутящий момент рассматривают для таких элементов, как гибкие муфты, зубчатые зацепления, соединительные элементы, а напряжения (сдвиговые) - для валов.
В качестве метода измерений используют один из следующих:
- измерение динамических напряжений тензодатчиками;
- измерение крутильных колебаний с помощью оптического дешифратора или других средств измерения угловых колебаний.
4.5.3 Измерения осевой вибрации вала
Осевую (продольную) вибрацию измеряют по согласованию между заинтересованными сторонами (классификационным обществом, судостроителем, судовладельцем, консультантами и т.п.).
Измерения проводят в точках, которые обеспечивают максимальную информацию о всех существенных модах вибрации.
Если результаты измерений не могут быть непосредственно использованы для оценки состояния, то их преобразуют в контролируемые параметры с помощью соответствующей математической модели.
Применяют один из следующих методов измерений:
a) измерение параметров осевой вибрации вала посредством:
- измерения параметров движения фланцев относительно подшипников или фундамента;
b) измерение осевого давления (силы) посредством:
- измерения продольных динамических напряжений вала тензодатчиками;
- применения упорной шайбы с датчиком давления;
- измерения параметров движения (вибрации) упорного подшипника с последующим пересчетом в осевую силу с помощью динамической модели подшипника;
- измерения изгибных напряжений на стационарных частях упорного подшипника с последующим пересчетом в осевую силу с помощью динамической модели подшипника.
Примечание 1 - Осевую вибрацию измеряют только в случае особой технической необходимости.
Примечание 2 - Для двухтактных дизельных двигателей измерения обычно выполняют на свободном конце коленчатого вала.
Примечание 3 - Измерения упорного давления (осевой силы) на упорных подшипниках выполняют только в особых случаях (например, для конкретных видов судов или с целью исследования повреждений). Их не применяют для крупных двухтактных дизельных двигателей и судовой установки с зубчатыми редукторами и упорными подшипниками, встроенными в корпус редуктора.
4.5.4 Измерения изгибных колебаний вала
Изгибные колебания вала измеряют по согласованию между заинтересованными сторонами (классификационным обществом, судостроителем, судовладельцем, консультантами и т.п.).
Измерения проводят в точках, которые обеспечивают максимальную информацию о всех существенных модах вибрации.
Если результаты измерений не могут быть непосредственно использованы для оценки состояния, то их преобразуют в контролируемые параметры с помощью соответствующей математической модели.
Применяют один из следующих методов измерений:
- измерение изгибных напряжений тензодатчиками;
- измерение перемещений вала двумя датчиками-зондами, расположенными под углом 90° друг к другу.
Примечание - Измерения изгибных колебаний вала выполняют только в особых случаях (например, если результаты расчетов показывают близость их собственных частот к частотам возбуждения). Такие измерения могут дать особо важную информацию в случае быстровращающихся валов малого диаметра, в случае увеличенного расстояния между подшипниками или в условиях действия изгибных моментов, что характерно для быстровращающихся карданных валов с большими углами сочленения.
При измерениях изгибных колебаний вала для определения истинных динамических изгибных напряжений необходимы два полных измерительных моста под углом 90° друг к другу.
4.5.5 Измерения поступательной вибрации на невращающихся частях
4.5.5.1 Общие положения
Поступательную вибрацию обычно измеряют с помощью акселерометров или датчиков скорости.
Если вибрацию измеряют на борту судна, то она включает в себя как собственную вибрацию судового оборудования, так и вибрацию, наведенную извне.
Условия измерений - по 4.2. Программа измерений и точки измерений должны быть согласованы заинтересованными сторонами.
4.5.5.2 Дизельный двигатель
4.5.5.2.1 Общие положения
Выбор точек измерений и критерии оценки вибрационного состояния зависят от вида опирания двигателя: упругое или жесткое.
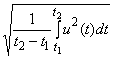
Судовые дизельные двигатели, как правило, имеют свидетельства об одобрении типа, что предполагает их способность выдерживать вибрацию определенного уровня. Кроме того, изготовители двигателей устанавливают для них критерии оценки вибрационного состояния, как правило, для вибрации на уровне 3 (верхней поверхности машинной рамы - см. рисунок 2). Иногда изготовители указывают диапазон типичных значений для определенного вида двигателей и способов их применения.
Однако сведения, предоставляемые изготовителями двигателей, обычно исходят из возможности долговременной эксплуатации двигателей без нарушения их целости. Вместе с тем при жестком закреплении двигателя на фундаменте необходимо принимать во внимание вибрацию и динамические силы, передаваемые им на корпус судна. По этой причине во внимание необходимо также принимать вибрацию на уровне 1 (на опорах двигателя - см. рисунок 2), которая должна быть существенно ниже установленной для уровня 3 при нормальной работе двигателя (обычно более чем вполовину в зависимости от направления измерения и метода крепления двигателя). Это относится не только к большинству низкооборотных двухтактных двигателей (см. 4.5.5.2.2), но также к жестко закрепленным четырехтактным двигателям.
Средне- и высокооборотные двигатели обычно устанавливают на упругих опорах. Измеряемая вибрация на раме и выступающих частях таких двигателей представляет собой результат совокупного действия сил, создаваемых самим двигателем, и его колебаний на упругих опорах. Обычно эти составляющие следует оценивать по отдельности. Упругие опоры двигателя, как правило, способны удовлетворить требованиям по низкой вибрации и силам, передаваемым на корпус судна. Таким образом, вибрация в месте соединения опоры с фундаментом обычно много ниже наблюдаемой на корпусе двигателя (см. 4.5.5.2.3). Типичные точки измерений и измеряемые параметры установлены в [5] и [9] (см. рисунок 2). Рекомендации этих стандартов можно использовать при отсутствии соответствующих рекомендаций от изготовителей двигателей.
|
|
а) Низкооборотный двухтактный двигатель | b) Четырехтактный двигатель |
L - левая сторона (со стороны привода); R - правая сторона (со стороны привода); х - продольное направление; у - поперечное направление; z - вертикальное направление; 1 - 1-й уровень (опоры); 2 - 2-й уровень (коленчатого вала); 3 - 3-й уровень (верхней поверхности рамы); 1 - конец рамы с приводной стороны;
2 - середина рамы (по длине двигателя);
3 - конец рамы с неприводной стороны
Рисунок 2 - Типичные точки измерений вибрации на дизельном двигателе
4.5.5.2.2 Поступательная вибрация двухтактных двигателей
Для соединения на одном валу обычно используют двухтактные двигатели с номинальными скоростями вращения от 70 до 250 мин. В большинстве своем такие двигатели жестко закрепляют на фундаменте судна с помощью болтовых соединений. Поэтому их вибрация, особенно вблизи фундамента, в большой степени зависит от конструкции фундамента и собственной частоты механической системы, состоящей из двигателя и устройств его соединения с фундаментом.
Если изготовителем двигателя не установлены критерии оценки его вибрационного состояния, то в качестве общего руководства можно использовать таблицу А.1 из [9], а также следующие рекомендации.
Вибрацию (среднеквадратическое значение) измеряют в диапазоне частот от 1 до 100 Гц, исключая при этом (отфильтровывая) участки резонансов (эта рекомендация отличается от приведенной в [9], пункт 4.1 и раздел 5).
Для вибрации рамы двигателя (уровень 3 согласно [9], пункт 4.2) в качестве начальной оценки максимальной вибрации можно принять класс вибрационной жесткости 28.
В зависимости от технических условий изготовителя или поставщика компонентов могут быть приняты более высокие уровни допустимой вибрации.
Для присоединенных устройств, таких как турбокомпрессоры, охладители воздуха турбонаддува, устройства управления, предельно допустимые уровни вибрации в соответствующем диапазоне частот и в соответствующих точках измерений должны быть определены из рекомендаций изготовителя двигателя и изготовителей этих устройств.
Вибрацию большинства присоединенных устройств (платформ, выхлопных труб и т.п.) следует рассматривать как местную, и к ней не применяют общие критерии оценки. Обычно такие устройства проектируются изготовителем двигателя, и он же устанавливает для них допустимые значения вибрации. Вибрация вспомогательных устройств (плит настила, поручней, трубопроводов) часто включает в себя локальные резонансы и поэтому требует отдельного рассмотрения.
Такие присоединенные устройства, как турбокомпрессоры и охладители воздуха турбонаддува, обычно поставляются по договору субподряда в типовом исполнении, имеют свидетельства об одобрении типа и по своим конструктивным характеристикам способны выдерживать вибрацию определенного уровня в зависимости от применения. Обычно для них можно допустить такие же уровни вибрации, что и для самого двигателя.
Примечание 1 - Указанный класс вибрационной жесткости следует рассматривать как ориентировочный поскольку стандарт [9] распространяется только на машины с номинальной скоростью свыше 200 мин.
Примечание 2 - Рисунок С.1 из [9] нельзя использовать для крупных двухтактных двигателей, поскольку указанные на нем частоты перехода 10 и 250 Гц не отражают влияние относительно низкой скорости двигателя и составляющих на низких частотах.
4.5.5.2.3 Поступательная вибрация средне- и высокооборотных четырехтактных двигателей
Судовые четырехтактные двигатели работают обычно в диапазоне скоростей от 300 до 2500 мин. Меньшие скорости можно наблюдать для крупных среднеоборотных двигателей, большие - для компактных высокооборотных двигателей. Обычно такие двигатели устанавливают на упругие опоры, а их вал соединен с гребным винтом через зубчатый редуктор.
В случае жесткой установки на фундамент взаимодействие двигателя, фундамента и конструкции судна аналогично тому, что было рассмотрено для двухтактного двигателя в 4.5.5.2.2. Кроме того, справедливы общие положения в отношении вибрации на уровне 1, приведенные в 4.5.5.2.1. Это означает, что помимо допустимых уровней вибрации двигателя следует рассматривать также силы, воздействующие на фундамент со стороны двигателя.
Для упруго опертых двигателей наблюдают вибрацию более высокого уровня, поскольку в нее дополнительно входят низкочастотные колебания опор. Эти же опоры существенно снижают силы, передаваемые на конструкцию судна. Соответственно, выше допустимая вибрация для уровня 1 (на опорах двигателя - см. рисунок 2), которая становится сопоставима с допустимой вибрацией для уровня 3 (верхняя поверхность рамы), установленной изготовителем.
Если изготовителем двигателя не установлены критерии оценки его вибрационного состояния, то в качестве общего руководства можно использовать [9], а также следующие рекомендации.
С учетом вышесказанного в качестве начальной оценки максимальной вибрации для вибрации рамы (уровень 1 согласно [9], пункт 4.2) упруго опертого высокооборотного четырехтактного двигателя можно принять класс вибрационной жесткости 45, а жестко опертого четырехтактного двигателя - класс вибрационной жесткости 28. Измерения на уровне 3 (верхняя поверхность рамы) для четырехтактного двигателя могут быть затруднены из-за недостатка места или четко определенных точек измерений, а также зачастую из-за наличия мешающего высокочастотного шума, если измерения проводят на головке цилиндра.
В зависимости от технических условий изготовителя могут быть приняты более высокие уровни допустимой вибрации. Особенно это справедливо для упруго опертых высокооборотных высокопроизводительных двигателей (см. также таблицу А.1 из [9]).
Вибрацию присоединенных устройств (выхлопных труб, трубопровода, охладителя воздуха турбонаддува, поручней и т.п.) следует рассматривать как местную, и к ней не применяют общие критерии оценки. Для них предельно допустимые уровни вибрации в соответствующем диапазоне частот и в соответствующих точках измерений должны быть определены из рекомендаций изготовителя двигателя и изготовителей этих устройств.
Такие присоединенные устройства, как турбокомпрессоры, охладители воздуха и распределительные патрубки, обычно имеют свидетельства об одобрении и по своим конструктивным характеристикам способны выдерживать вибрацию определенного уровня в зависимости от применения. Обычно для них можно допустить такие же уровни вибрации, что и для самого двигателя.
4.5.5.3 Газовая турбина
Если изготовителем газовой турбины не даны инструкции по оценке ее вибрационного состояния, то в качестве общего руководства можно использовать стандарты [7] и [8].
Если газовую турбину используют в качестве двигателя, то следует различать вибрацию, создаваемую самой турбиной, и вибрацию, наведенную от стороннего судового оборудования (например, гребного винта). Обычно изготовитель определяет расчетные значения для вибрации, производимой самой турбиной, а измерения вибрации выполняют в целях контроля ее состояния. Как правило, с этой целью контролируют дисбаланс ротора (1-я и 2-я гармоники частоты вращения в радиальном направлении), а также осевые перемещения валов. Оценку осуществляют согласно критериям, которые были использованы при представлении данных квалификационному обществу.
Примечание 1 - В отношении вибрации, наведенной от судового оборудования, большинство изготовителей указывают, что для нее среднеквадратичное значение скорости не должно превышать 14 мм/с. Однако некоторые модели серийно выпускаемых турбин способны выдерживать удары и вибрацию более высокого уровня.
Газовая турбина входит также в состав турбонаддувочного агрегата двигателя (турбокомпрессора). Поскольку турбокомпрессор закрепляют на двигателе, то он может рассматриваться как присоединенное устройство. Однако, как правило, большинство турбокомпрессоров специально сконструировано для работы в условиях тяжелых вибрационных нагрузок. В качестве допустимых следует брать те уровни вибрации, которые были указаны при одобрении устройства. Изготовитель приводит допустимые значения для общего ускорения вибрации, например 25 м/с. Это значение относится к вибрации от двигателя, усиленной устройством крепления турбокомпрессора на двигателе. Ее нужно отличать от вибрации, создаваемой дисбалансом самого турбокомпрессора. Система мониторинга турбокомпрессора обычно оценивает его внутреннее состояние, для чего применяет методы фильтрации сигнала. Полученный сигнал не дает оценку общей вибрации турбокомпрессора.
4.5.5.4 Паровая турбина
Если изготовителем паровой турбины не даны инструкции по оценке ее вибрационного состояния, то в качестве общего руководства можно использовать стандарты [6] и [7].
Если паровую турбину используют в качестве двигателя, то следует различать вибрацию, создаваемую самой турбиной, и вибрацию, наведенную от стороннего судового оборудования (например, гребного винта). Обычно изготовитель определяет расчетные значения для вибрации, производимой самой турбиной, а измерения вибрации выполняют в целях контроля ее состояния. Как правило, с этой целью контролируют дисбаланс ротора (1-я и 2-я гармоники частоты вращения в радиальном направлении), а также осевые перемещения валов. Оценку осуществляют согласно критериям, которые были использованы при представлении данных квалификационному обществу.
Примечание 1 - В отношении вибрации, наведенной от судового оборудования, большинство изготовителей указывают, что для нее среднеквадратичное значение скорости не должно превышать 14 мм/с.
Примечание 2 - Паровые турбины меньших размеров, работающие на выхлопных газах двигателя, применяют для производства электроэнергии. Их, как правило, устанавливают на отдельной раме, и к ним применяют требования по вибрационному состоянию для зоны А по стандарту [5]. Для других условий применения, например при установке турбины непосредственно на двигатель, изготовителю следует предусмотреть более высокие уровни допустимой вибрации.
Паровые турбины с раздельными валами для привода гребного винта передают вибрацию через общий зубчатый редуктор. Вибрацию зубчатого редуктора оценивают отдельно согласно критериям, использованным при его одобрении.
4.5.5.5 Гребной электродвигатель
Если изготовителем электродвигателя не даны инструкции по оценке его вибрационного состояния, то в качестве общего руководства можно использовать стандарт [7].
Если электродвигатель используют в качестве привода движителя, то следует различать вибрацию, создаваемую самим электродвигателем, и вибрацию, наведенную от судового оборудования (например, гребного винта). Обычно изготовитель определяет расчетные значения для вибрации, производимой самим электродвигателем. Повышенная вибрация электродвигателя, чаще всего, связана с дисбалансом ротора и проблемами электромагнитного характера. Влияния сторонней вибрации можно избежать, если проводить измерения вибрации электродвигателя на стенде. Обычно среднеквадратичное значение скорости на корпусе двигателя значительно меньше 5 мм/с (значение, обусловленное допустимым дисбалансом). Дополнительные составляющие вибрации могут возникнуть в результате соединения электродвигателя с судовыми системами и непосредственно валом гребного винта.
Примечание - В отношении вибрации, наведенной от судового оборудования, большинство изготовителей указывают, что для нее среднеквадратичное значение скорости не должно превышать 14 мм/с. Однако конструкции многих электродвигателей рассчитаны на воздействие более сильной вибрации.
Составляющая вибрации на частоте вращения может быть обусловлена не только наличием дисбаланса, но также, в основном, дефектами сопряжения в валопроводе (несоосностью). Эти две составляющие необходимо различать между собой: первая должна оставаться в пределах расчетного допуска (обычно менее 5 мм/с), вторая - соответствовать критериям, которые были использованы при представлении данных квалификационному обществу. Обычно для второй составляющей первая гармоника частоты вращения попадает в зону В по [5].
Для других электрических машин, таких как генераторы, ключевым является вопрос правильного выбора опор ротора. Следует исследовать возможность подшипников ротора выдерживать вибрацию высокого уровня.
4.5.5.6 Зубчатый редуктор
Измерения поступательной вибрации на коробке редуктора позволяют косвенным образом оценить нагрузку на зубчатую передачу. Эта вибрация может быть вызвана как внутренними, так и внешними силами.
Обычно вибрация, производимая самой зубчатой передачей, проявляется на гармониках зубцовой частоты, характерных частотах подшипника качения, а также гармониках частот вращения валов редуктора.
Внешние силы связаны с работой двигателя, гребного винта, а также могут быть вызваны несоосностью соединений.
Следует разделять вибрацию от разных источников. Гармоники зубцовой частоты на корпусе редуктора находятся в верхней части диапазона частот измерений, а их амплитуды малы по сравнению с вибрацией, связанной с работой другого судового оборудования. Для правильной оценки этой вибрации применяют фильтрацию сигнала.
Измерения следует проводить во всем диапазоне рабочих скоростей редуктора. Следует убедиться, что присоединенные к редуктору элементы судовой установки не попадают в резонанс с основными частотами возбуждения от двигателя и гребного винта.
Вибрацию измеряют в диапазоне частот от 2 до 1000 Гц.
Поскольку точно оценить нагрузку зубчатой передачи на основе результатов измерений вибрации затруднительно, последнюю всегда следует поддерживать на низком уровне. Допустимый уровень вибрации зависит от многих факторов, таких как тип и размер редуктора, тип двигателя, материал корпуса, тип фундамента, точки измерений и источники вибрации. По этой причине невозможно дать каких-либо общих рекомендаций в отношении допустимой вибрации.
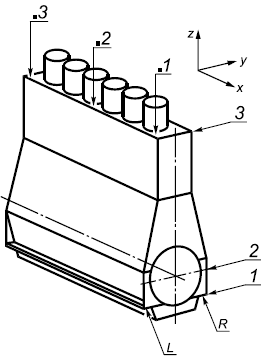
При оценке вибрации следует руководствоваться рекомендациями изготовителя. Заинтересованные стороны могут сами договориться о том, какой уровень вибрации редуктора можно считать приемлемым. Обычно рассматривают вибрацию в рабочих условиях в трех направлениях: продольном, поперечном и вертикальном. Типичные точки измерений показаны на рисунке 3. Изготовитель редуктора может указать другие точки измерений, для которых им установлены предельно допустимые значения.
Обычно целью установления предельного уровня вибрации является обеспечение целости конструкции редуктора. Вопросы, связанные с комфортом, а также с требованиями классификационных обществ могут потребовать применения специальных критериев, но эти вопросы выходят за рамки настоящего стандарта.
Уровни вибрации, рекомендуемые изготовителем или согласованные заинтересованными сторонами, выражаются через классы жесткости. При отсутствии рекомендаций используют минимальный класс жесткости для данного вида оборудования.
Обычно для долговременной работы редуктора (зоны А и В вибрационного состояния) приемлемой считают жесткость 7, 11 или 18 (см. [9]) в зависимости от технических характеристик редуктора.
Допустима кратковременная работа (зона С) при жесткости вибрации 11, 18 или 28 (см. [9]) в зависимости от технических характеристик редуктора. Также такую вибрацию можно считать приемлемой для судов с малой продолжительностью работы судового оборудования (например, яхт).
Чтобы определить, является ли доминирующей вибрация на частоте вращения, необходимо исследовать максимальные пики БПФ-спектра. Обычно такие пики не должны превышать 7 мм/с, но в ряде случаев в зависимости от технических характеристик редуктора допустимы значения 11 и даже 18 мм/с.
При превышении установленных норм вибрации об этом должен быть поставлен в известность изготовитель оборудования, который в определенных обстоятельствах и на основе детального изучения сделанных записей может разрешить работу при повышенной вибрации.
При консольном нагружении вала для его опирания используют упругую выносную стойку (например, первый подшипник редуктора с входным валом от компактной газовой турбины), для которой может быть допустима вибрация более высокого уровня.
Вибрацию присоединенных устройств (охладителей, панелей, патрубков и пр.) рассматривают как местную, на которую не распространяются положения настоящего стандарта.
Примечание - В определенных условиях может оказаться необходимым рассматривать преобразование крутильных колебаний валов редуктора в поступательную вибрацию.
|
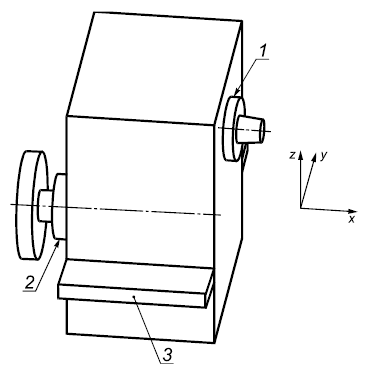
1 - крышка подшипника входного вала; 2 - крышка подшипника выходного вала; 3 - полка редуктора
Рисунок 3 - Типичные точки измерений вибрации на судовом редукторе
4.5.5.7 Подшипники скольжения
Измерение продольной вибрации валов и выявление связанных с нею проблем (например, работы валопровода в условиях резонанса) представляет собой сложную задачу, которую проще решать через измерения вибрации на подшипниковых опорах.
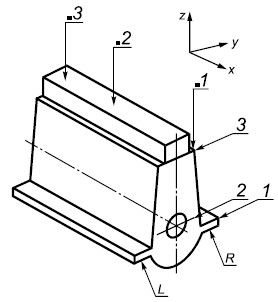
Общее руководство по измерению вибрации на подшипниках приведено в [5]. Типичные токи измерения показаны на рисунке 4.
|
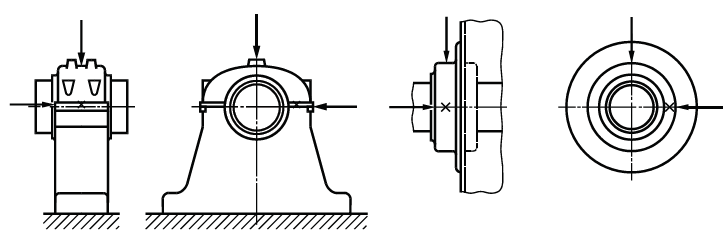
Рисунок 4 - Точки измерений на подшипниках
Для судовых установок как с двухтактными, так и с четырехтактными двигателями часто используют конструкции с отдельно стоящим выносным подшипником. Поскольку сами подшипники не являются источниками вибрации, то при измерениях основной упор делают на оценку уровня вибрации (скорости или ускорения), передаваемой на подшипник через вал (изгибные колебания) или фундамент (обычно от гребного винта или двигателя). Сторонняя вибрация от винта или двигателя может, однако, передаваться и по другому пути - через вал, вызывая его осевую или радиальную вибрацию. Поэтому при анализе вибрации подшипников важно разделить основные источники и пути распространения вибрации, особенно в случаях, когда математические модели предсказывают близкое соседство резонансных частот с основными частотами возбуждения. Для более точной оценки вибрационного состояния измерения рекомендуется проводить по крайней мере на двух уровнях: на корпусах и основаниях подшипников, - а также использовать технику модального анализа.
Руководство [5] распространяется также на подшипники, впрессованные в корпус, например, зубчатого редуктора судовой установки с четырехтактным двигателем.
Примечание 1 - В качестве опор промежуточных валов могут быть использованы подшипники качения, чувствительные к вибрации (вносимой, в основном, дисбалансом), несоосностям и силам, действующим в карданном соединении. Конструкция таких подшипников должна соответствовать уровням вибрации, возникающей при их применении. Изготовители подшипников предоставляют рекомендации по их применению в условиях сильной вибрации.
Примечание 2 - Особенно чувствительны к вибрации подшипники качения в сочетании с малонагруженными легкими валами (например, армированными углеродным волокном). В таких ситуациях для снижения вибрации может оказаться полезным предварительное нагружение подшипника за счет намеренно создаваемой несоосности подшипника и вала или же следует использовать подшипники специальной конструкции.
4.5.5.8 Интегрированный движительный агрегат
Интегрированные движительные агрегаты (или подруливающие устройства), такие как механические или электрические азимутальные подруливающие устройства, движитель Фойта-Шнайдера или водометный движитель в основном состоят из тех же машин и механизмов, вибрация которых была рассмотрена выше. Так, для электрических азимутальных подруливающих устройств анализ вибрации проводят по тем же принципам, что и для гребного электродвигателя, а для механических - по тем же принципам, что и для зубчатых передач, подшипников и валов.
В отношении азимутальных устройств и водометных движителей руководствуются следующими общими рекомендациями:
a) измерения осуществляют:
- в трех направлениях на корпусах и опорах подшипников (см. 4.5.5.7),
- на трубе водовода;
b) в целях оценки вибрации:
- преобразуют ускорение, измеренное в каждой точке и в каждом направлении, в скорость,
- выделяют составляющие узкополосной вибрации в полосе 1 Гц в диапазоне до 1 кГц в зависимости от применяемого критерия оценки,
- сравнивают результат с установленным предельным значением (см. приложение В),
- сохраняют все данные для возможной последующей проверки и подтверждения результатов.
Примечание 1 - Рекомендации по измерениям для азимутальных подруливающих устройств и водометных движителей приведены в приложении В.
Рассмотренное выше не распространяется на винты с прямым приводом.
В отношении подруливающих устройств специальной конструкции расчетные значения вибрации предоставляет изготовитель. Особо высокие требования предъявляются к измерениям для водометных движителей, поскольку при этом необходима фильтрация составляющих вибрации от многочисленных источников. Уровни вибрации, связанные с потоком выбрасываемой воды, обычно много выше вызываемых дисбалансом или другими неисправностями механической природы.
Примечание 2 - Рекомендации по измерениям для движителей Фойта-Шнайдера приведены в приложении С.
Измерения вибрации боковых движителей осуществляют:
- в трех направлениях на фланце туннеля;
- в месте соединения туннеля с вертикальной рамой корпуса (только в целях наблюдения);
- в трех направлениях на верхней части электродвигателя (в случае его непосредственного соединения с туннелем).
Измерения выполняют во всем диапазоне рабочих скоростей. В случае подруливающего устройства с постоянной скоростью вращения винта (с регулируемым шагом) измерения проводят на номинальной скорости в диапазоне выходной мощности от 80% до 100%.
5 Критерии оценки
Критерии оценки должны быть согласованы между всеми заинтересованными сторонами. При этом необходимо (особенно в отношении крутильных колебаний) руководствоваться существующими правилами классификационных обществ и принятыми на международном уровне критериями оценки элементов судовых установок, таких как зубчатые передачи, валы и устройства сопряжения. В любом случае первоочередным является выполнение требований к конструкции и предельным уровням вибрации, установленных изготовителем оборудования.
В отсутствии рекомендаций от изготовителя и других руководств используют рекомендации, приведенные в 4.5.
6 Протокол испытаний
Протокол измерения вибрации судовых установок должен содержать как минимум следующие сведения:
a) назначение измерений;
b) использованное измерительное и, если необходимо, испытательное оборудование;
c) результаты калибровки, выполненной на месте (например, тензометрических датчиков электрическим сигналом);
d) места установки и ориентация преобразователей (желательно с приложением схемы расположения точек измерений);
e) программу измерений, включая условия испытаний, условия работы оборудования и его конфигурацию при каждом испытании (см. 4.2);
f) результаты измерений в форме таблиц, диаграмм и т.п. (могут включать в себя записи временных сигналов, спектры, графики зависимости параметров от скорости или нагрузки, перечень выявленных собственных частот);
g) комментарии, оценки и заключения;
h) дату и место проведения испытаний, название и адрес проводившей их организации;
i) данные судна в соответствии с нижеприведенной формой.
Название судна: | Номер ИМО: |
Судостроительная организация: | Верфь: |
Корпус: | |
Тип (танкер, контейнеровоз, трейлер и т.п.): | |
Класс: | |
Длина между перпендикулярами | |
Осадка (с полным грузом) Т, м: | |
Гребной винт: | |
Номер: | |
Тип (фиксированный шаг, регулируемый шаг): | |
Число лопастей: | |
Диаметр | |
Номинальная скорость вращения, мин | |
Двигатель: | |
Изготовитель: | |
Тип: | |
Максимальная длительная мощность (MCR), кВт: | |
Номинальная скорость вращения (при MCR), мин | |
Число цилиндров: | |
Двух- или четырехтактный: | |
Приложение А
(справочное)
Переходная вибрация и вибрация при маневрировании судна
В дополнение к испытаниям, описанным в 4.3, или вместо них для измерения пиковых значений вибрации заинтересованные стороны могут согласовать следующие условия измерений:
a) резкая перекладка руля (право на борт и лево на борт) при заданной скорости хода судна;
b) работа на швартовах (особенно для буксиров, сторожевых кораблей и рыболовецких судов);
c) движение задним ходом;
d) испытания с отключением гребных винтов (для многовинтовых судов);
e) переключения муфт;
f) пуск и останов установки;
g) включение и отключение крупных энергопотребляющих устройств (например, боковых движителей) при работающем валогенераторе.
Измерения в таких условиях могут проводиться в специальных целях и потребовать применения специальных средств измерений и обработки данных.
Приложение В
(рекомендуемое)
Оценка вибрации азимутальных движителей и валопроводов по измерениям на невращающихся частях
В таблице В.1 приведены критерии оценки вибрационного состояния для пропульсионных установок мощностью от 100 кВт до 4 МВт по измерениям среднеквадратичного значения скорости в диапазоне частот от 5 до 1000 Гц.
В зависимости от результатов измерений вибрационное состояние относят к одной из следующих трех зон:
Зона А (вибрация низкого уровня). При попадании в эту зону допускается непрерывная работа устройства без ограничений.
Зона В (вибрация среднего уровня, допускающая продолжение работы в течение длительного времени). Если вибрация находится в этой зоне, то рекомендуется проверить состояние соединений, фундамента и подшипников, а также возможность неправильного функционирования оборудования.
Зона С (вибрация высокого уровня, не допускающая продолжения работы в течение длительного времени). Если вибрация находится в этой зоне, то необходимо проверить состояние соединений, фундамента и подшипников, а также возможность неправильного функционирования оборудования. Квалифицированный персонал должен принять меры по снижению вибрации.
Таблица В.1 - Границы зон вибрационного состояния
Зона | Среднеквадратическое значение скорости, мм/с |
А | До 4,5 включительно |
В | От 4,5 до 11,2 включительно |
С | Свыше 11,2 |
Приложение С
(рекомендуемое)
Оценка вибрации движителей Фойта-Шнайдера по измерениям на невращающихся частях
С.1 Измерения
С.1.1 Рекомендуемые условия измерений
Для корректной оценки вибрации движителя судно должно двигаться строго по курсу с номинальной скоростью при максимальной длительной мощности 100%.
С.1.2 Точки измерений
Измерения вибрации проводят в точках, показанных на рисунке С.1:
- М1 в верхней части вблизи ведущей шестерни;
- М2 в области первой распределительной тяги;
- М3 в области второй распределительной тяги.
Во всех точках измерения проводят в вертикальном направлении.
|
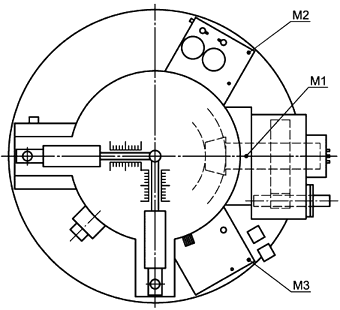
Рисунок С.1 - Точки измерений
С.1.3 Измеряемые величины
Измеряют среднеквадратичное значение скорости, мм/с, в узких полосах частот в диапазоне от 1 до 1000 Гц.
С.2 Оценка
Все данные измерений должны быть сохранены, преимущественно в электронном формате, чтобы иметь возможность их последующей обработки. Вибрацию в узких полосах частот сравнивают с предельными значениями согласно заданному критерию (см. также [5]).
В зависимости от результатов измерений вибрационное состояние относят к одной из следующих трех зон:
Зона А (вибрация низкого уровня, менее 4,5 мм/с). При попадании в эту зону допускается непрерывная работа устройства без ограничений.
Зона В (вибрация среднего уровня, от 4,5 до 7,1 мм/с). Условия работы еще считают допустимыми, однако с помощью частотного анализа следует выявить максимальные пики и связанные с ними частоты.
Зона С (вибрация высокого уровня, свыше 7,1 мм/с). Такие условия непригодны для продолжительной работы. Следует провести детальный анализ вибрации и принять меры к ее снижению. Эти работы должны быть выполнены квалифицированным персоналом.
Примечание - Обычно при анализе не учитывают эффекты, связанные с резонансами.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 2041 | IDT | ГОСТ Р ИСО 2041-2012 "Вибрация, удар и контроль технического состояния. Термины и определения" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - IDT - идентичный стандарт. | ||
Библиография
[1] | ISO 3046-5, Reciprocating internal combustion engines - Performance - Part 5: Torsional vibrations |
[2] | ISO 7919-3, Mechanical vibration - Evaluation of machine vibration by measurements on rotating shafts - Part 3: Coupled industrial machines |
[3] | ISO 8528-9, Reciprocating internal combustion engine driven alternating current generating sets - Part 9: Measurement and evaluation of mechanical vibrations |
[4] | ISO 8579-2, Acceptance code for gears - Part 2: Determination of mechanical vibrations of gear units during acceptance testing |
[5] | ISO 10816-1:1995, Mechanical vibration - Evaluation of machine vibration by measurements on nonrotating parts - Part 1: General guidelines |
[6] | ISO 10816-2, Mechanical vibration - Evaluation of machine vibration by measurements on nonrotating parts - Part 2: Land-based steam turbines and generators in excess of 50 MW with normal operating speeds of 1500 r/min, 1800 r/min, 3000 r/min and 3600 r/min |
[7] | ISO 10816-3, Mechanical vibration - Evaluation of machine vibration by measurements on nonrotating parts - Part 3: Industrial machines with nominal power above 15 kW and nominal speeds between 120 r/min and 15000 r/min when measured in situ |
[8] | ISO 10816-4, Mechanical vibration - Evaluation of machine vibration by measurements on nonrotating parts - Part 4: Gas turbine sets with fluid-film bearings |
[9] | ISO 10816-6:1995, Mechanical vibration - Evaluation of machine vibration by measurements on nonrotating parts - Part 6: Reciprocating machines with power ratings above 100 Kw |
[10] | IACS UR M68, Dimensions of propulsion shafts and their permissible torsional vibration stresses. Available (viewed 2012-04-11) from: //www.iacs.org.uk. Follow "Documents", "Unified requirements", "UR M" |
[11] | VDI 3838, Measurement and evaluation of mechanical vibration of reciprocating piston engines and piston compressors with power ratings above 100 kW - Addition to ISO 10816-6 |
УДК 534.322.3.08:006.354 | ОКС | 17.140.30 |
47.020.01 | ||
Ключевые слова: судовое оборудование, вибрация, энергетическая установка, движитель, вибрация, крутильные колебания, изгибные колебания, поступательная вибрация, ходовые испытания | ||
Электронный текст документа
и сверен по:
, 2019
{kind=link}