ГОСТ Р 55717-2013/IEC/TS 62558:2011
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Ультразвук
ЭХО-ИМПУЛЬСНЫЕ УЛЬТРАЗВУКОВЫЕ ДИАГНОСТИЧЕСКИЕ ПРИБОРЫ, РАБОТАЮЩИЕ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ
Фантом с цилиндрическими искусственными кистами в ткане-имитирующем материале, методы оценки трехмерных распределений коэффициента обнаружения пустот при периодических испытаниях
Ultrasonics. Real-time pulse-echo scanners. Phantom with cylindrical, artificial cysts in tissue-mimicking material and method for evaluation and periodic testing of 3D-distributions of void-detectability ratio (VDR)
ОКС 17.140.50
Дата введения 2015-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным учреждением "Всероссийский научно-исследовательский и испытательный институт медицинской техники" Федеральной службы по надзору в сфере здравоохранения и социального развития (ФГБУ "ВНИИИМТ" Росздравнадзора) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 411 "Аппараты и оборудование для лучевой диагностики, терапии и дозиметрии"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 8 ноября 2013 г. N 1394-ст
4 Настоящий стандарт идентичен международному документу IEC/TS 62558:2011* "Ультразвук. Эхо-импульсные ультразвуковые диагностические приборы, работающие в режиме реального времени. Фантом с цилиндрическими искусственными кистами в ткане-имитирующем материале, методы оценки трехмерных распределений коэффициента обнаружения пустот при периодических испытаниях" (IEC/TS 62558:2011 "Ultrasonics - Real-time pulse-echo scanners - Phantom with cylindrical, artificial cysts in tissue-mimicking material and method for evaluation and periodic testing of 3D-distributions of void-detectability ratio (VDR)", IDT)
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Ноябрь 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт является примером метода оценки изделия и описания, используемого для этих целей тест-объекта (фантома). Приведенные в стандарте методы и оборудование позволяют, без информации от производителя дать оценку технического уровня ультразвукового диагностического прибора (УЗДП).
Настоящий стандарт описывает требуемые показатели и эксплуатационные характеристики ткане-имитирующего материала (ТИМ) фантома с искусственными кистами, расположенными в трехмерном пространстве. Дан пример реализации соответствующего фантома. Результаты измерений на фантоме не зависят от конструкции и программного обеспечения УЗДП и ультразвуковых (УЗ) датчиков.
УЗДП и УЗ-датчики требуют периодического контроля, поскольку из-за ухудшения в течение времени их технических параметров может снижаться качество УЗ-изображений. Предлагаемый фантом предназначен для проведения измерений, позволяющих в течение нескольких лет эксплуатации УЗДП в рамках периодических испытаний определять изменения коэффициента обнаружения пустот (VDR).
________________
VDR является сокращением английского термина для коэффициента обнаружения пустот "void-detectobiliti ratio".
В конструкции данного фантома используется ТИМ, в котором слоями поочередно расположены слой "кисты" и слой "затухания". Фантом позволяет проводить измерения по трем осям ультразвукового пучка и определять VDR в зависимости от глубины изображения, полученного с УЗ-датчика. Основой конструкции фантома являются звукопоглощающие искусственные кисты (далее - кисты), имитирующие протоки поджелудочной железы, по изображениям этих кист производятся измерения VDR. Кисты на изображении должны казаться звукопоглощающими. Измерение VDR позволяет количественно определять способность УЗДП достоверно отображать эти объекты. Рост артефактных сигналов (далее артефакты) изображений кист указывает на ухудшение некоторых параметров изображения. Определенное количество артефактов ожидаемо для любого УЗДП из-за формы УЗ-пучка и характеристик приема сигнала. Рост артефактов может быть вызван и другими причинами. Процедура измерения позволяет достоверно и воспроизводимо определять границу видимости небольших пустот, являющуюся важным параметром качества изображения УЗДП в процессе эксплуатации. Специальное программное обеспечение позволяет не только собирать и обрабатывать данные, но и протоколировать полученные результаты.
1 Область применения
Настоящий стандарт устанавливает основные характеристики фантома и методики измерений VDR для УЗДП и соответствующих УЗ-датчиков. Действие стандарта может быть ограничено с точки зрения долгосрочной воспроизводимости результатов измерений.
Стандарт устанавливает:
- основные характеристики и требования к фантому с ТИМ и трехмерно распределенными искусственными кистами в виде звукопоглощающих пустот;
- конструкцию фантома, оборудование, необходимое для измерений, и соответствующие алгоритмы для программного обеспечения.
В настоящее время стандарт применим для линейных датчиков. Рекомендуется выполнить проверку однородности до измерения VDR.
Примечание - Основная концепция фантома может быть применима и для других типов УЗ-датчиков, однако это требует дальнейшей проверки (см. приложение D).
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
IEC 60050-802, International Electrotechnical Vocabulary - Part 82: Ultrasonics (Международный электротехнический словарь. Часть 802. Ультразвук)
3 Термины и определения
В настоящем стандарте применены термины по МЭК 60050-802, а также следующие термины с соответствующими определениями:
3.1 акустически согласующая среда: Среда, как правило жидкость или гель, которая позволяет без отражения УЗ-сигнала связать поверхность УЗ-датчика с диафрагмой фантома.
3.2 артефактный сигнал: Сигнал в конкретном сегменте изображения, там где он наименее ожидаем (например, изображения пустот).
3.3 коэффициент затухания, м: Степень уменьшения амплитуды колебаний в плоской волне на единицу длины в среде для одного направления распространения на заданной частоте.
Примечание - Коэффициент затухания выражается в дБ м, получается умножением степени уменьшения на 8,686 дБ.
[МЭК 61391-2:2010, определение 3.4]
3.4 коэффициент обратного рассеивания, м ср
: Средняя акустическая мощность, рассеянная определенным объектом под углом 180° к направлению падающего пучка в единичном телесном угле на единицу объема, деленная на интенсивность падающего пучка; средняя мощность, полученная из различных пространственных реализаций рассеивающего объема на заданной частоте.
Примечание - Частотную зависимость следует учитывать там, где при использовании коэффициента обратного рассеяния частота значительно влияет на результаты.
[МЭК 61391-1:2006, определение 3.6, измененное]
3.5 контраст обратного рассеяния: Отношение между коэффициентами обратного рассеяния от двух объектов или областей
[МЭК 61391-2:2010, определение 3.8]
Примечание - Контраст обратного рассеяния может быть частотно-зависимым, но он не зависит от системы отображения.
3.6 B-, C-, D-изображение: Основные слои трехмерных линий акустического сканирования:
B-изображение - в плоскости, которая получается из линий акустического сканирования (плоскость сканирования);
C-изображение - в плоскости, перпендикулярной линиям акустического сканирования из B-изображения;
D-изображение - в плоскости, перпендикулярной плоскости B-изображения и плоскости C-изображения.
3.7 B-, C-, D-(изображение) плоскость:
B-плоскость - плоскость сканирования;
C-плоскость - восстановленная плоскость изображения, которая перпендикулярна линиям акустического сканирования в B-плоскости;
D-плоскость - восстановленная плоскость изображения, которая перпендикулярна плоскости сканирования и C-плоскости.
3.8 диафрагма: Элемент корпуса фантома, осуществляющий вход и выход распространяемых УЗ-волн к/от ТИМ без существенного затухания или искажения.
Примечание - Диафрагма обычно состоит из тонкой мембраны, которая защищает ТИМ от испарения, протекания и механического повреждения датчиком и существенно не искажает УЗ-сигналы.
3.9 пороговая чувствительность: Наименьшее достоверное значение измерения, которое можно обнаружить при данной методике измерения.
[МЭК 60761-1:2002, определение 3.10, измененное]
3.10 данные изображения в цифровом виде: Двумерный или трехмерный набор значений пикселей (вокселей), полученных из значений уровней серого для изображения, полученного в B-режиме, отправленного на экран монитора УЗДП.
3.11 документация: Удобочитаемая информация о реализации устройства.
[МЭК 62453-1:2009, определение 3.1.18]
Примечание - В техническое описание может входить как печатная документация, так и документация, прописанная через расширенный язык разметки (XML). Документация может состоять из нескольких документов и изображений.
3.12 фиксированный образ: Части изображения, полученного в B-режиме, которая остается неподвижной в кадре при перемещении УЗ-датчика.
3.13 значение уровня серого: Значение яркости пикселей изображения, полученного в B-режиме (из амплитуды сигнала, отраженного от соответствующего участка тела).
Примечание - Значения уровня серого определяются яркостями конкретных пикселей изображения, их диапазон от 0 (черный) до 255 (белый). Черный свидетельствует о слабом сигнале, белый - о сильном, что используется в настоящем стандарте для последующих расчетов. В изображениях, где применено инвертированное отображение, черный имеет уровень 256, а белый - 0.
3.14 линия сканирования (акустического): Одна из линий сканирования, которые формируют в B-режиме изображение на мониторе УЗДП, где каждая линия является огибающей линии A-сканирования, в которой амплитуды эхосигналов преобразуются в значения яркости.
[МЭК 61391-1:2006, определение 3.26, измененное]
3.15 плоскость сканирования: Плоскость полученного изображения, содержащая линии акустического сканирования.
[МЭК 61391-2:2010, определение 3.30]
3.16 частотный коэффициент затухания, м Гц
: На заданной частоте наклон кривой графика коэффициента затухания в зависимости от частоты.
3.17 ткане-имитирующий материал; ТИМ: Материал, для которого значения параметров скорости распространения (скорость звука), характеристики отражения, рассеяния и затухания аналогичны значениям параметров для мягких тканей в диапазоне ультразвуковых частот от 1 до 15 МГц.
[МЭК 61391-1:2006, 3.36, измененное]
3.18 фантом на основе ТИМ с трехмерно распределенными искусственными кистами: Фантом, содержащий ТИМ, в котором есть определенные области, контраст обратного рассеяния которых ниже, чем 60 дБ, по сравнению с областями, содержащими ТИМ.
3.19 проверка однородности: Проверка однородности передаваемых сигналов всех элементов решетки датчика.
3.20 пустота: Звукопоглощающая искусственная киста, область с определенной геометрией в ТИМ, в которой распространяются звуковые волны без рассеяния.
Примечание - В физиологическом растворе определенной концентрации, как известно, чрезвычайно низкий уровень сигналов рассеяния и, следовательно, он является оптимальным приближением к идеальной пустоте.
3.21 коэффициент обнаружения пустот; VDR: Величина, характеризующая видимость области изображения, соответствующая пустоте определенного диаметра, окруженной ТИМ в фантоме. Определяется по формуле
![]() ,
,
где - среднее значение пикселей изображения ТИМ в области, окружающей пустоту, для заданной C-плоскости;
- среднее значение пикселей изображения в области изображения, где расположена пустота;
- среднеквадратичное отклонение (СКО) средних значений пикселей по отдельным областям ТИМ, равным области пустот и лежащих в области пустот, среднее значение объема пикселей изображения ТИМ в области изображения, где расположена пустота, для заданной C-плоскости;
- количество объема вокселей (пикселей) для заданной C-плоскости или для определенной части C-плоскости (например, область изображения одной пустоты или область изображения всех пустот в C-плоскости).
Примечания
1 Изображение окружающего ТИМ предположительно будет отображено в меняющихся уровнях серого [то есть УЗ-изображение спекл-структуры (зернистое)] за счет УЗ интерференционной картины.
2 Формула для вычисления VDR взята из [4].
3.21.1 коэффициент обнаружения для единичного воксела; ![]() : Коэффициент обнаружения для единичного воксела определяется по формуле
: Коэффициент обнаружения для единичного воксела определяется по формуле
![]() ,
,
где - среднее значение объема пикселей изображения ТИМ в области, окружающей пустоту, для заданной C-плоскости;
- значение уровня серого i-го воксела (пиксела) для заданной C-плоскости или для определенной части C-плоскости (например, для области изображения одной пустоты или для области изображения всех пустот в C-плоскости);
- СКО средних значений объема пикселей по отдельным областям ТИМ, равным области пустот и лежащих в области пустот, для заданной C-плоскости.
Примечание - Формула для вычисления VDR взята из [4].
3.21.2 максимальное значение VDR в пустоте; ![]() : Максимальное значение VDR в пустоте определяется по формуле
: Максимальное значение VDR в пустоте определяется по формуле
![]() ,
,
где - среднее значение пикселей изображения ТИМ в области, окружающей пустоту, для заданной C-плоскости;
- минимальное значение уровня серого области изображения. соответствующего области внутри пустоты;
- СКО средних значений пикселей по отдельным областям ТИМ, равным области пустот и лежащих в области пустот, для заданной C-плоскости.
Примечание - Формула для вычисления VDR взята из [4].
3.21.3 максимальное значение VDR в ROI в C-плоскости; VDR(max): Максимальное значение VDR в определенной области интереса (ROI) в C-плоскости.
________________
ROI является сокращением английского термина для области интереса "region of interest".
3.21.4 абсолютный максимум VDR в ROI в объеме; ![]() : Абсолютно максимальное значение из всех значений
: Абсолютно максимальное значение из всех значений ![]() в объеме, составляющем оцениваемую ROI, т.е. в представлении функции VDR(max) на полную глубину z в оценке ROI.
в объеме, составляющем оцениваемую ROI, т.е. в представлении функции VDR(max) на полную глубину z в оценке ROI.
3.22 порог VDR: Минимальное значение VDR, при котором пустота на УЗ-изображении визуализируется.
Примечание - Порог обнаружения пустот определенных размеров (см. А.10.1), где уровень шума зависит от электронных помех, для сферических пустот был выбран равным VDR=2,5 [4].
4 Обозначения
- скорость звука, мс
;
- значение уровня серого
-го воксела (пиксела) для заданной C-плоскости или для определенной части C-плоскости (например, для области изображения одной пустоты или для области изображения всех пустот в C-плоскости);
- минимальное значение уровня серого области изображения, соответствующего области внутри пустоты;
T - температура, °С;
S - минерализация (процентное содержание соли), промилле;
![]() - максимальное значение цифровых данных изображения (значения уровня серого);
- максимальное значение цифровых данных изображения (значения уровня серого);
VDR - коэффициент обнаружения пустот - среднее значение по изображению пустоты;
![]() - коэффициент обнаружения для единичного воксела (пиксела) i, измеряемый по области из цифровых данных изображения;
- коэффициент обнаружения для единичного воксела (пиксела) i, измеряемый по области из цифровых данных изображения;
![]() - коэффициент обнаружения пустот - максимальное значение в изображении пустоты;
- коэффициент обнаружения пустот - максимальное значение в изображении пустоты;
VDR(max) - максимальное значение VDR в определенной ROI на C-плоскости;
![]() - абсолютный максимум значения VDR в представлении функции
- абсолютный максимум значения VDR в представлении функции ![]() по глубине;
по глубине;
- глубина, м;
- среднее значение пикселей изображения ТИМ в области, окружающей пустоту, для заданной C-плоскости;
- среднее значение пикселей изображения в той области изображения, где расположена пустота;
- среднее значение пикселей изображения в трехмерной ROI;
- СКО средних значений пикселей по отдельным областям ТИМ, равным области пустот и лежащих в области пустот, для заданной C-плоскости.
5 Условия окружающей среды для проведения измерений с фантомом
Типичные условия окружающей среды во время проведения измерений должны быть следующими:
- температура - 20°С-24°С;
- относительная влажность - 45%-75%;
- атмосферное давление - 86-106 кПа.
6 Описание фантома на основе ТИМ с трехмерно распределенными искусственными кистами
6.1 Общее представление о трехмерном фантоме
Трехмерный фантом состоит из ТИМ с расположенными в нем пустотами заданной формы (например, цилиндрическими) и размерами, соответствующими частотному диапазону испытуемых УЗ-датчиков.
Примечание - Пример фантома, соответствующего этому описанию, представлен в приложении А.
6.2 Общие технические требования к фантому
Фантом, позволяющий реализовать методику измерения, описанную в настоящем стандарте, должен содержать звукопоглощающие мишени с заданным местоположением в ТИМ.
Анализ изображений осуществляется на основе цифровых данных изображения, которые были получены во время сканирования фантома. Производитель должен предоставлять руководство по эксплуатации, содержащее информацию по правильному использованию и техническому обслуживанию.
6.3 Требования к ТИМ
Следующие параметры ТИМ должны находиться в пределах установленных требований:
- скорость звука - (1540±10) м с на 3 МГц;
- плотность - (1,00±0,11) г см;
- частотный коэффициент затухания - (0,7+0,2/-0,05) дБ см МГц
в диапазоне частот от 1 до 15 МГц. Если фантом изготовлен с использованием слоистых материалов (см. приложение А), то среднее значение его частотного коэффициента затухания должно соответствовать указанному выше значению;
- коэффициент обратного рассеяния - (3х10 см
ср
) 10 дБ на 3 МГц; с частотной зависимостью такого типа, где 2<
<4 в диапазоне от 1 до 15 МГц. Значение коэффициента обратного рассеяния фантома как функцию частоты следует указывать в протоколе вместе с результатами испытаний УЗДП, полученными с помощью этого фантома. Плотность размещения рассеивателей в фантоме должна быть достаточно высокой, чтобы обеспечить рэлеевскую статистику в распределении амплитуды эхосигналов (см. рисунок А.3). Для проведения измерений в соответствии с настоящим стандартом, необходимо, чтобы плотность распределения рассеивателей зависела от частоты и характеристик фокусировки УЗ-датчиков и УЗДП. Около 10 рассеивателей на 1 мм
достаточно для большинства датчиков, работающих на частоте до 15 МГц.
Фантомы с такими характеристиками ТИМ могут быть сделаны с использованием, например, губчатого материала с открытыми порами или пенополиуретана, погруженного в солевой раствор. Эти материалы имеют микроскопические неоднородности, которые равномерно распределены по всему объему материала для получения необходимого уровня затухания.
6.4 Звукопоглощающие мишени
Контраст обратного рассеяния звукопоглощающих мишеней должен быть не менее -60 дБ относительно фона ТИМ. Дегазированный солевой раствор является подходящим материалом для заполнения звукопоглощающих мишеней. Концентрация соли должна быть подобрана таким образом, чтобы скорость звука соответствовала (1540±10) м с. Значения скорости звука в солевых растворах как функции концентрации соли и температуры приведены на рисунке А.6.
Звукопоглощающие мишени должны располагаться на разных глубинах по всему объему фантома. Мишени заданного диаметра с центрами, находящимися в одной плоскости, должны быть расположены так, чтобы в плоскости сканирования было не менее шести таких мишеней, просматриваемых в различных латеральных положениях, на каждой глубине от УЗ-датчика. Мишени должны располагаться в латеральных положениях так, чтобы их можно было визуализировать из разных положений в плоскости сканирования. Мишени в фантоме, представленном в приложении A, являются цилиндрами, чьи торцы параллельны поверхности сканирования.
Звукопоглощающие мишени различных размеров должны быть представлены на каждой глубине и в латеральном положении. Для каждого частотного диапазона должны быть представлены пустоты двух размеров. Размеры пустот должны быть выбраны, исходя из реалистических значений толщины и ширины пучка и частоты УЗ-датчика, а именно:
- пустоты диаметром 4 и 2,5 мм подходят для УЗ-датчиков, работающих в диапазоне 1-4 МГц;
- пустоты диаметром 3 и 1,5 мм подходят для УЗ-датчиков, работающих в диапазоне 4-8 МГц;
- пустоты диаметром 2,5 и 1 мм подходят для УЗ-датчиков, работающих в диапазоне 8-15 МГц.
Одной из причин возникновения артефактных сигналов внутри звукопоглощающей пустоты является наличие боковых лепестков ультразвукового луча [9]. Предпосылкой для выявления артефактных сигналов на изображении звукопоглощающих пустот является разница в амплитудах УЗ-сигнала и окружающей ТИМ на величину более чем -60 дБ.
6.5 Корпус фантома
Основной функцией корпуса является защита от ухудшения свойств содержимого фантома (испарения жидкости) с течением времени в процессе эксплуатации и хранения. Материал, используемый для стенок корпуса, должен предотвратить ухудшение свойств содержимого фантома.
6.6 Поверхность сканирования
Поверхность сканирования должна обеспечивать акустический контакт всей активной поверхности УЗ-датчика с фантомом. Если поверхность сканирования включает в себя окно сканирования, содержащее пленку или мембрану для предотвращения высыхания ТИМ или защиты содержимого ТИМ от повреждения датчиком, то свойства мембраны и материалов, в ней содержащихся, таких как толщина, плотность, частотный коэффициент затухания, должны соответствовать требованиям, перечисленным выше. При несоответствии этим требованиям должны быть представлены потери при распространении УЗ-сигнала как функции частоты.
6.7 Размеры
Размеры фантома должны позволять проводить оценку VDR УЗ-датчиков для не менее чем 2/3 отображаемого поля, на котором УЗ-датчик обычно используется. Например, для проведения измерений на УЗДП, в котором обеспечивается глубина обзора 24 см, требуется фантом глубиной не менее 16 см. Обычно это не менее чем четырехкратный размер приемо-передающей апертуры УЗ-датчика, так что любое ухудшение качества изображения, вызванное боковыми лепестками или плохим пространственным разрешением, будет проявляться в пределах этого диапазона.
6.8 Стабильность характеристик фантома
Изготовитель должен оценить стабильность характеристик фантома во времени и привести критерии оценки сохранения его свойств.
6.9 Цифровые данные изображения
Методики испытаний и последующего анализа данных, описанные в настоящем стандарте, применяются к цифровым данным изображения, полученным в результате проверки УЗДП и соответствующих УЗ-датчиков. Для всех случаев должны быть представлены значения уровня серого для всех областей пространства на изображении. Данные изображения, обычно это матрица, состоящая примерно из 300x300 пикселей и имеющая разрешение по амплитуде (прямо пропорциональное шкале серых тонов) не менее 8 бит (256 градаций).
Цифровые данные изображения могут быть получены путем захвата видеокадра для оцифровки изображений, полученных с выходных каналов, обычно используемых для передачи данных изображения на аналоговый монитор или записывающее устройство. Во время оцифровки видеосигнала должны быть обеспечены определенные условия, чтобы избежать или свести к минимуму искажение сигнала. Необходимо обратить особое внимание на следующие параметры:
- динамический диапазон входного сигнала устройства захвата видеоизображения должен быть скорректирован в соответствии с максимальной амплитудой сигнала видеовыхода;
- разрешение по оцифрованной амплитуде (определяется размером пикселя в байтах) должно быть лучше, чем у серошкального разрешения сигнала ультразвукового изображения, полученного с видеовыхода. Минимальное требование - 8 бит или 256 оттенков серого;
- для сигнала ультразвукового изображения, полученного с помощью ТВ-функции преобразования, должна быть обеспечена линейность. Пространственное разрешение (определяется размером воксела) цифрового изображения должно быть лучше, чем линейная плотность изображения оригинального видео;
- частота кадров видеосигнала для устройства захвата видеоизображения должна быть достаточно высокой для получения данных, чтобы не отставать от частоты передачи входных данных, если отображаемые области находятся в движении. Следует учитывать разницу между частотой кадров сканирования и частотой кадров видеовыхода;
- должен быть использован подходящий по входному/выходному сопротивлению кабель, чтобы избежать отражений (наводок) на линии. Кабель длиной от 1 до 2, как правило, является достаточным;
- цифровые данные изображения должны соответствовать отображенным данным на мониторе УЗДП. Цифровые данные изображения, полученные с УЗДП, не должны быть подвергнуты любым последующим обработкам с момента подготовки данных и выходного сигнала УЗДП на монитор до их анализа, описанного в документе.
Данные также могут быть получены с использованием изображений формата DICOM (отраслевой стандарт создания, хранения, передачи и визуализации медицинских изображений и документов обследованных пациентов) [13] или изображений, полученных на УЗДП в других форматах. Этот метод используется большинством производителей УЗДП для внутреннего контроля качества изображения и совершенствования обработки изображения. Также существует возможность распространения метода для использования персоналом ЛПУ, например, через ресурсы протоколов передачи данных (ftp).
Кроме того, многие УЗДП обеспечивают сохранение файлов изображения на сменных носителях, таких как USB-флэш-накопителях, магнитооптических дисках, zip-дисках или компакт-дисках, а также на других цифровых носителях.
Кроме того, многие ЛПУ используют системы передачи и архивации изображений PACS для просмотра и хранения данных УЗ-изображений. Производители PACS-систем обычно предоставляют средства для получения изображений в несжатом формате, таком как формат хранения растровых графических изображений tiff- или DICOM-формате и рабочие станции с доступом к данным изображений.
В любом случае, когда данные изображения получены не с помощью видеовыхода (аналогового или цифрового), а из данных, полученных с УЗДП, следует убедиться, что оцифрованным амплитудам действительно соответствуют уровни серого, показанные на экране.
До тех пор пока DICOM не предложит стандарт для трехмерных изображений, лучшим решением будет использование VGA- или DVI-конвертера для оцифровки сигнала видеовыхода УЗДП.
7 Основные принципы измерений на фантоме с трехмерными звукопоглощающими пустотами
7.1 Общие положения
Оборудование для измерения VDR состоит из фантома, проверяемых УЗ-датчика и УЗДП и средств для получения цифровых данных изображения в плоскостях сканирования, которые распространяются по всему объему фантома, содержащего пустоты.
Приемлемым методом для получения трехмерных данных является применение механического позиционера УЗ-датчика для записи цифровых данных изображения с близко расположенных плоскостей сканирования, описанного в приложении А. Интервал между плоскостями сканирования должен быть равен расстоянию между вокселами в пределах плоскостей сканирования, однако он должен быть меньше 1/4 диаметра пустоты, по которой будет вычисляться VDR.
В других способах получения трехмерных данных используются специальные УЗ-датчики, например, со встроенным механическим перемещением или с использованием ручного перемещения УЗ-датчика в процессе записи данных изображения на киноповторе (кинопетле, функция УЗДП), если они поддерживаются в УЗДП. Однако последний метод не обеспечивает нужного для B-плоскости интервала.
Проверка однородности, проводимая на УЗ-датчиках, имеет важное значение. Она должна быть проведена до измерения VDR. Один из возможных методов проверки однородности описан в приложении D.
7.2 Анализ
Ниже приводится допустимый метод анализа.
Вычисление VDR для звукопоглощающих мишеней (например, пустот) заданного диаметра, глубины и латерального положения в плоскостях, параллельных к доступным C-плоскостям, описано в приложении A. Однако для настоящего стандарта результаты должны быть описаны для C-плоскостей, содержащих пустоты.
Внутри реконструированных изображений из полученных данных по трехмерному пространству определяют ROI.
Данными в этой области должны быть кубические вокселы (т.е. размеры воксела должны быть одинаковыми во всех трех направлениях) известного размера. Для обеспечения этого должен быть известен масштаб изображения. Трехмерные параметры ROI хранятся в виде матрицы с возможностью просмотра и обработки этого трехмерного набора данных.
Для каждой C-плоскости в рамках трехмерного ROI рассчитываются значения среднего и СКО
для ТИМ. Могут быть предложены различные подходы для исключения из расчетов некоторых областей пустот:
- использование дополнительной информации;
- использование локальной шкалы серого для сравнения с другими амплитудами вокселей в C-плоскости, чтобы выяснить, является ли отдельный воксел частью пустоты.
Различные подходы для исключения областей пустот из расчетов значения среднего и СКО для ТИМ приведены в приложении А.
Значения и
используются для расчета
![]() для каждого воксела в соответствии с формулой
для каждого воксела в соответствии с формулой
![]() (1)
(1)
с заданным трехмерным набором данных.
Для удобства просмотра и дальнейшей обработки значения ![]() записываются в матрицу, подобную матрице, содержащей набор информации о трехмерном ROI в градациях серого.
записываются в матрицу, подобную матрице, содержащей набор информации о трехмерном ROI в градациях серого.
Значения ![]() рассчитываются для каждой C-плоскости различными методами. Либо статистические данные могут быть получены непосредственно для полной C-плоскости, либо VDR-данные могут быть предварительно рассчитаны для каждой пустоты, а затем информацию об отдельных пустотах можно отнести к единому набору данных для плоскости. Для статистической оценки может быть использован расчет либо средних, либо максимальных значений VDR.
рассчитываются для каждой C-плоскости различными методами. Либо статистические данные могут быть получены непосредственно для полной C-плоскости, либо VDR-данные могут быть предварительно рассчитаны для каждой пустоты, а затем информацию об отдельных пустотах можно отнести к единому набору данных для плоскости. Для статистической оценки может быть использован расчет либо средних, либо максимальных значений VDR.
Примечание - Использование максимальных значений - разумный подход, т.к. на примере распределения градаций серого внутри каждой пустоты можно видеть резкий спад к центру пустоты (см. приложение А), и практический опыт показывает, что возможность визуализации пустоты сильно коррелирует с этим максимальным значением.
Средние значения получить гораздо сложнее, т.к. должны быть определены границы каждой пустоты либо путем определения порогового значения амплитуды, либо с помощью дополнительной информации о локализации отдельных пустот.
Примечание - Такое определение границ пустот является основным источником ошибок при определении среднего значения.
Средние или максимальные значения VDR для всех C-плоскостей, показанные на графике, дают представление о распределении VDR по глубине. Статистические данные могут быть рассчитаны по этим данным путем построения сглаженной кривой.
Пустота заданного диаметра и ее расположение могут быть названы определенными, если значение VDR для нее превышает 2,5. Диапазон, где VDR превышает это значение, является полезными рабочим диапазоном для диаметров пустот, содержащихся в этой ROI [4].
Сохраненные градации серого ROI и набор трехмерных данных ![]() используются для визуального контроля автоматизированной оценки УЗ-датчика.
используются для визуального контроля автоматизированной оценки УЗ-датчика. ![]() -визуализация областей без пустот также имеет важное значение, т.к. она показывает, будет ли интерференционная картина создавать видимость пустоты там, где ее нет.
-визуализация областей без пустот также имеет важное значение, т.к. она показывает, будет ли интерференционная картина создавать видимость пустоты там, где ее нет.
Примечание - Значения ![]() сами по себе представляют несущественную информацию, однако все значения
сами по себе представляют несущественную информацию, однако все значения ![]() для изображения пустоты C-плоскости или ROI являются основополагающими для получения трехмерной картины уровней VDR, средних и максимальных значений VDR в изображении одной пустоты или группы пустот.
для изображения пустоты C-плоскости или ROI являются основополагающими для получения трехмерной картины уровней VDR, средних и максимальных значений VDR в изображении одной пустоты или группы пустот.
Приложение A
(справочное)
Описание конструкции фантома и результатов проверки
А.1 Общие положения
В этом приложении описывается фантом, конструкция и свойства которого удовлетворяют требованиям настоящего стандарта, а также примеры испытаний с его использованием.
Оборудование, необходимое для измерения VDR, состоит из фантома, ползунка позиционирования УЗ-датчика с платформой, ПК (или ноутбука), с программным обеспечением для записи и анализа изображений, оборудования для подключения к видеовыходу УЗДП и ползунка позиционирования (см. рисунок А.1).
|
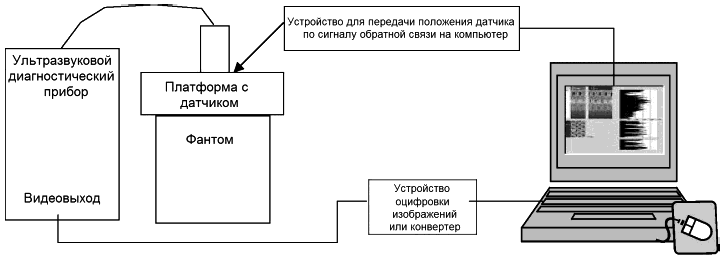
Рисунок А.1 - Пример оборудования для проведения измерений
Это техническое решение подходит для проверки УЗ-датчиков с линейными решетками и криволинейными решетками при определенных условиях (см. приложение D).
А.1.1 Термины и определения, применяемые в приложении А
А.1.1.1 система сбора данных: Централизованная система, получающая данные из одной или нескольких удаленных точек.
Примечания
1 Данные могут передаваться в аналоговом виде, а затем быть оцифрованы, если это необходимо.
2 В данном случае данные получаются при помощи устройства захвата кадра или конвертера доступных выходных сигналов УЗДП.
[МЭК 62270:2004, 3.14]
А.1.1.2 слой: Срез ТИМ с затуханием и обратным рассеянием.
А.1.1.2.1 слой затухания: Срез ТИМ, у которого коэффициент затухания больше, чем средний коэффициент затухания по фантому в целом.
А.1.1.2.2 слой пустот: Срез ТИМ, содержащий пустоты и имеющий коэффициент затухания меньше, чем средний коэффициент затухания по фантому в целом.
А.1.1.3 фантом с искусственными кистами для трехмерного отображения: Фантом содержит чередующиеся слои материала ("затухание" и "пустота") с обратным рассеянием, ориентированные перпендикулярно к направлению распространения звука и наполненные звукопоглощающим жидким материалом, таким, что скорость звука, среднее затухание и коэффициенты обратного рассеяния фантома приблизительно те же, что у мягких тканей человека.
Примечание - Эта информация взята из документа "Tissue Characterization Consulting, А-4850 Timelkam Austia". Она дается для удобства пользователей настоящего стандарта и не является одобренной МЭК.
А.2 Фантом
А.2.1 Общие сведения
Фантом размещается в жесткой пластиковой коробке со следующими размерами: высота - 22 см, длина - 15 см, ширина - 8 см.
Фантом состоит из чередующихся слоев пенополиуретана (слои затухания и слои пустот), каждый из которых имеет толщину 5 мм. Каждый второй слой (слой пустот) содержит цилиндрические пустоты, вырезанные в пене (см. рисунки А.2, А.3 и А.4). Пена и пустоты пропитаны дегазированной (7%-ной весовой концентрации) соленой водой. Концентрация соли регулируется таким образом, чтобы скорость звука в пропитанной пене была (1540±10) м с на 20°С. Было установлено, что уровень обратного рассеяния для пенополиуретана, пропитанного солевым раствором, был тем же.
Примечание - Свойства пенополиуретана достаточно стабильны, и он доступен от разных производителей по всему миру.
Пачка слоев имеет высоту около 18 см. После заполнения фантома солевым раствором необходимо выполнить вакуумирование, чтобы удалить оставшиеся пузырьки воздуха. Фантом герметизируют полиуретановой пленкой толщиной 0,25 мм над первым слоем пустот. Пленка используется в качестве связующего окна площадью 11x5,5 см, ее затухание пренебрежимо мало.
| |
а) Группа слоев ТИМ, содержащая попеременно слои пустот и слои затухания из пенополиуретана (поролона) | б) Отверстия разных диаметров в слоях пустот, позволяющие использовать фантом на различных ультразвуковых частотах (1-15 МГц) |
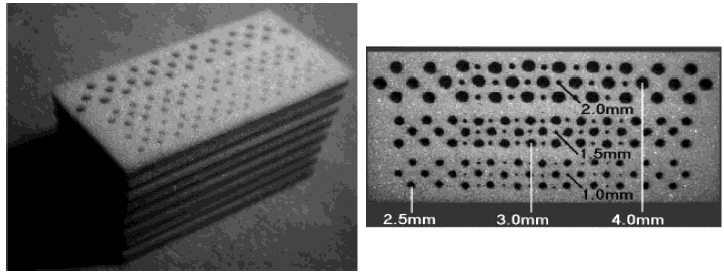
Рисунок А.2 - Слои ТИМ
Пенополиуретановый слой затухания имеет плотность от 120 до 130 кг м, а слой с пустотами - от 20 до 30 кг м
. Для слоев затухания частотный коэффициент затухания - около 0,7 дБ см
МГц
, для слоев пустот - около 0,2 дБ см
МГц
. Таким образом, средний частотный коэффициент затухания фантома - около 0,45 дБ см
МГц
.
Слои затухания используются для того, чтобы ослабить УЗ-импульсы, потому что "слои пустот" не ослабляют их. В этом случае не происходит выделение сигнала от искусственных кист. Наличие пустот с низким коэффициентом затухания, находящихся в слоях фантома, обладающих низким коэффициентом затухания, делает выделение удаленных от центра (дистальных) артефактов, полученных от пустот, пренебрежимо малым.
А.2.2 Структура пены
Структуру пены с открытыми стенками пор (толщиной от 0,1 до 0,25 мм) см. на рисунке А.3. Для получения рассеяния важно, чтобы толщина не была больше, чем длина волны исследуемого ультразвукового сигнала.
| ||
a) Пена в разрезе | b) Увеличенное изображение пены слоев затухания | c) Увеличенное изображение пены слоев пустот |
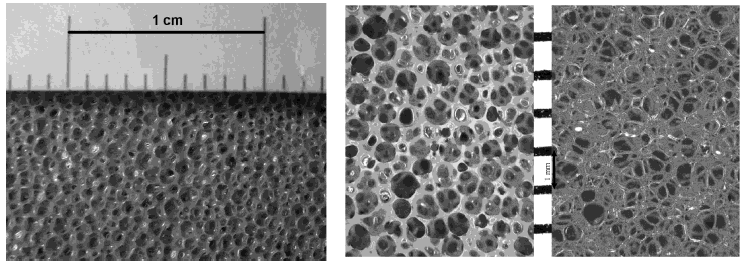
Рисунок А.3 - Структура пены
|
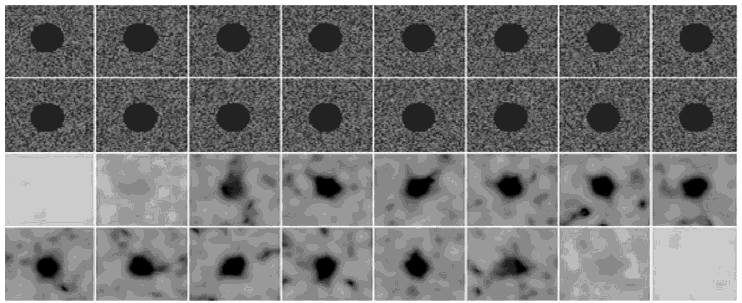
C-изображения пустот показывают результаты математического моделирования одной цилиндрической пустоты. В качестве исходных данных моделирования пустот использованы 16 поперечных срезов (C-изображения). Смоделированные "изображения фантома" (нижние изображения), рассчитанные с использованием 3D-свертки, показывают искажения формы пустот, вызванные спекл-структурой. В реальных изображениях фантома они не могут быть ожидаемыми, т.к. в них будут меньшие искажения пустот из-за структуры пены. Изменение VDR в пустотах одного размера также имеет место.
Рисунок А.4 - C-изображения пустот
А.2.3 Рэлеевское распределение для пены
Структура пенополиуретана характеризуется случайным распределением рассеяния ультразвука. Поэтому можно ожидать рэлеевского распределения уровней эхосигналов.
На нижней части рисунка А.5 приведено сравнение распределения амплитуд, выпрямленных эхосигналов в пенополиуретане и рэлеевского распределения. Оба распределения представлены в линейном масштабе. Сигналы изображения, полученного с УЗДП, обычно отображаются в логарифмическом или похожем на него сжатом масштабе. Рэлеевское распределение меняется на нормальное логарифмическим сжатием.
|
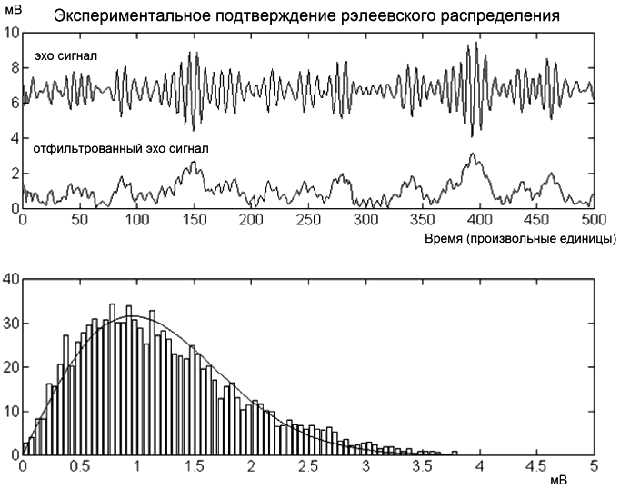
Верхний рисунок - верхняя кривая - эхосигнал амплитуды сканирования;
нижняя кривая - отфильтрованный эхосигнал
нижний рисунок - гистограмма отфильтрованного эхосигнала и соответствующего рэлеевского распределения
Рисунок А.5 - Экспериментальное подтверждение рэлеевского распределения для ТИМ с затуханием
А.2.4 Скорость звука
Температура и соленость воды, заполняющей фантом, влияют на скорость звука. Их влияние на характеристики фантома можно оценить, исходя из данных о солености воды (без пены), показанных на рисунке А.6. Зависимость скорости звука от температуры и солености воды, а также от глубины можно представить в виде формулы
![]() , (А.1)
, (А.1)
где c - скорость звука, мс;
T - температура, °С;
S - соленость, промилле;
z - глубина, м.
Информация взята из [8], [9], [10].
Зависимость скорости звука от температуры при солености х 10.
|
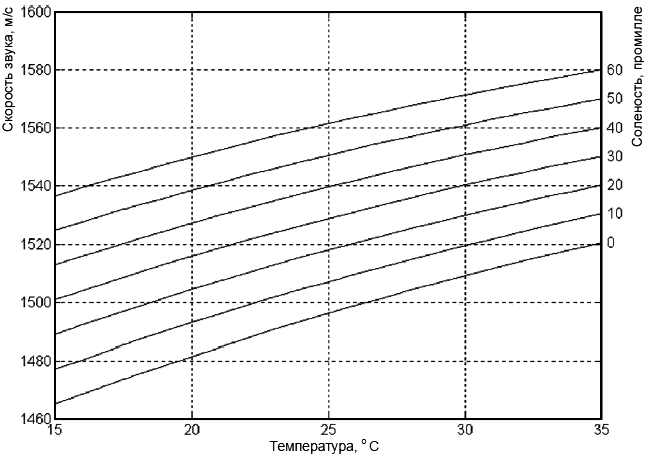
Рисунок А.6 - Скорость звука в соленой воде
А.3 Платформа, обеспечивающая проверку датчика на трехмерном фантоме
В левой части рисунка А.7 показаны сменные адаптеры для различных типов датчиков, например линейных, конвексных, фазированных и секторных (для основного использования). Справа показан адаптер для внутриполостных датчиков (на рисунке - адаптер без трансректальных или трансвагинальных датчиков).
|

Рисунок А.7 - Фантом с электрическим приводом и двумя типами адаптеров
На верхней части фантома датчики помещаются внутри каретки, которая либо перемещается вручную, либо с помощью привода с шаговым двигателем.
Движение каретки перпендикулярно B-плоскости сканирования датчика. Движение возможно как назад, так и вперед. Датчик скользит по диафрагме фантома. Для того чтобы обеспечить хороший акустический контакт между датчиком и фантомом, между датчиком и окном фантома вводят акустический гель. Для конвексных датчиков в качестве связующего элемента может быть использована вода (водяная баня).
Программное обеспечение использует электрический привод для сканирования ROI, находящийся за акустическим окном фантома. Устройство, определяющее положение УЗ-датчика, посылает сигнал обратной связи. Это позволяет избежать проблем с корректировкой расположения.
А.4 Соединение УЗ-оборудования с ПК
Изображения, полученные с УЗДП, передаются в режиме реального времени на компьютер с помощью цифрового преобразователя или конвертера, в зависимости от доступного выхода сигнала УЗДП (см. рисунок А.1). Для конвертера необходим, например, VGA- или DVI-выход. В УЗДП рекомендуется применять устройство захвата кадров с VHS- или SVHS-выходом.
А.5 Порядок проведения измерений
Измерения осуществляются в полуавтоматическом режиме. Они включают в себя:
1) фиксацию датчика на фантоме, обеспечение акустического контакта;
2) настройку УЗДП [яркость, контрастность, размер изображения, динамический диапазон (60 дБ), параметры препроцессинга и постпроцессинга];
3) соединение выхода УЗДП с выходом цифрового преобразователя ПК;
4) настройку цифрового преобразователя и окна записи изображения ПО;
5) начало сканирования (моторизированное или ручное).
|
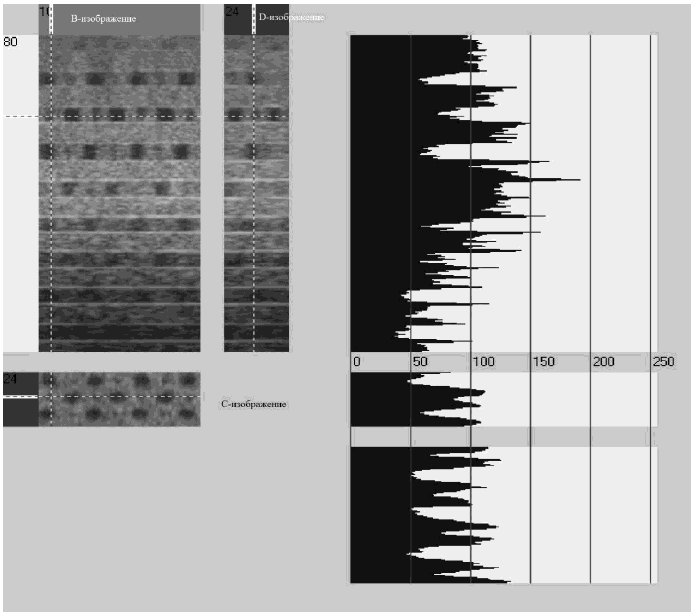
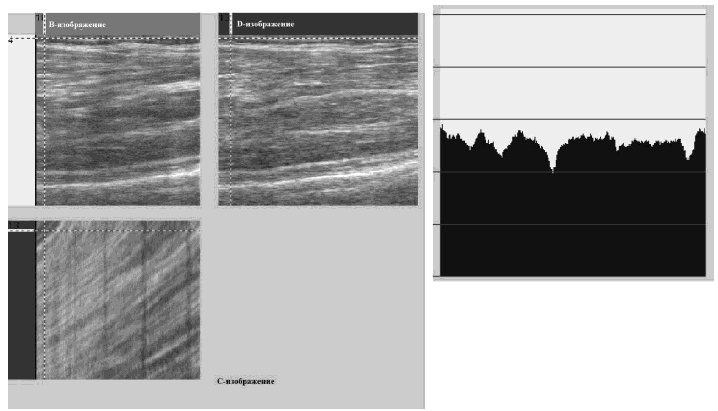
Cлева - B-, D-, C-изображения (пустоты показаны как темные области);
справа - уровни яркостей серого (горизонтальная шкала) вдоль трех линий изображения;
справа - линии, являющиеся пересечениями плоскостей BD, CD и BC
Рисунок А.8 - B-, D-, C-изображения и шкала серого
ПО, установленное на ПК, с помощью электрического привода позволяет сканирование ROI с постоянной скоростью. Для визуального контроля изображения фантома в B-, C-, D-плоскостях вместе с динамическим диапазоном на серой шкале отображаются на мониторе ПК (см. рисунок А.1 или А.8). Кроме того, возможны различные варианты отображения значений VDR (см. ниже).
Обсчет данных можно сделать уже независимо от сохраненных данных. УЗ-изображения анализируются с помощью специального ПО (см. ниже). Первым шагом в этом анализе является открытие серии измерений в окне оцифровщика на экране и задание на нем ROI вручную. После автоматического рендеринга изображений можно переходить к дальнейшим операциям.
А.6 Автоматизированная оценка результатов измерения
В процессе измерения получается множество УЗ-изображений. Изображения B-плоскостей сохраняются в трехмерной матрице. Из этой матрицы строятся также изображения C- и D-плоскостей. C-плоскости параллельны поверхности сканирования; на них пустоты отображаются в виде круглого сечения.
Боковые стенки имеют неправильные контуры из-за структуры пены (см. рисунки А.3 и А.4). D-плоскости перпендикулярны к B- и C-плоскостям. На B- и D-плоскостях пустоты отображаются в виде прямоугольников (см. рисунок А.8, слева). Нижняя и верхняя части пустоты чаще всего дают сильный сигнал из-за когерентного рассеяния, что можно видеть на рисунке А.8. В правой части рисунка А.8 показаны уровни серого вдоль трех направлений фантома, показанных линиями на изображениях (см. левую часть рисунка А.8).
Для этого типа отображения полезно проверять, чтобы уровни серого при отображении не достигали максимального значения, но и не падали до нулевого уровня. Большие пустоты отображаются насыщенными, когда динамический диапазон УЗДП менее 60 дБ.
А.7 Расчет VDR
Для расчета значений VDR нужно проделать следующее. Первая область интереса (трехмерная ROI) задается вручную на изображении. Обычно это трехмерный объем (как показано на рисунке А.10), но для пояснения мы будем использовать данные одной линии (как показано на рисунке А.5). Для трехмерной ROI автоматизация разницы между областями соответствующих пустот и областей ТИМ выполнена по следующему алгоритму (см. рисунок А.9).
В пределах трехмерной ROI рассчитывается средний уровень сигнала . Все точки с уровнем серого
![]() определяются как пустоты, остальные точки определяются как ТИМ. Высокие значения
определяются как пустоты, остальные точки определяются как ТИМ. Высокие значения , включенные в значения ТИМ, вызваны отражением от нижних или верхних частей пустот. Для точек ТИМ рассчитывается среднее значение
и среднеквадратичное отклонение
. Для всех вокселей в трехмерной ROI
![]() рассчитывается для
рассчитывается для по формуле
![]() . (А.2)
. (А.2)
Появление наибольшего значения VDR в определенной области (линия, плоскость, ROI или изображение пустоты) используется для описания сигналов в этой области и соответствует точке с самым низким уровнем серого.
Таким образом, ![]() для пустоты рассчитывается с самого низкого уровня серого
для пустоты рассчитывается с самого низкого уровня серого для изображения этой пустоты по формуле
![]() . (А.3)
. (А.3)
|
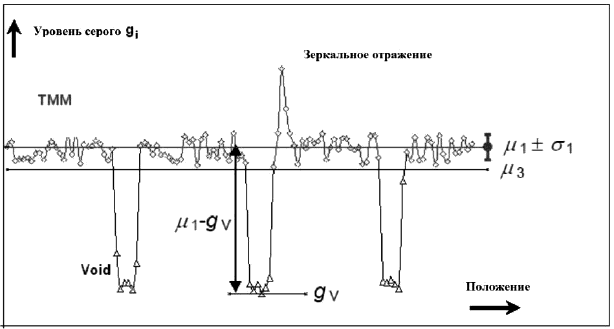
Рисунок А.9 - Иллюстрация расчета VDR для области интереса, состоящей из одной линии
На рисунке А.9 проиллюстрирована разница между точками пустот и точками ТИМ в обозначениях, используемых в формулах (А.2) и (А.3).
Мониторы с инвертированной шкалой уровней серого могут быть полезны, т.к. пустоты будут отображаться как белые пятна на черном фоне. Они лучше распознаются, чем темные пятна на белом фоне. Инвертированная шкала серого используется на большинстве следующих рисунков.
Примечание - Определение ![]() предполагает некоторое снижение уровня спекл-структуры, возникающее в обработке УЗ-изображений, таким образом случайные нулевые уровни сигнала в спекл-структуре не делают
предполагает некоторое снижение уровня спекл-структуры, возникающее в обработке УЗ-изображений, таким образом случайные нулевые уровни сигнала в спекл-структуре не делают ![]() исключительно полезной мерой шума.
исключительно полезной мерой шума.
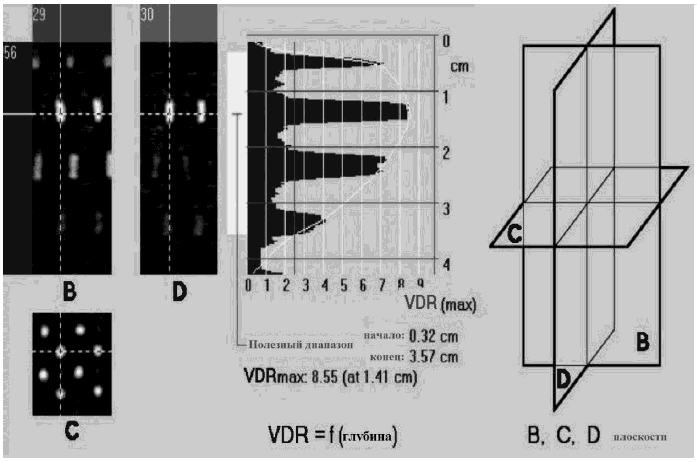
|
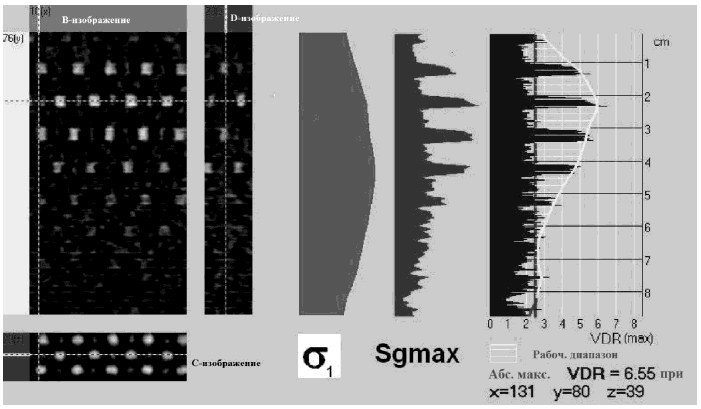
Рисунок А.10 - B-, C-, D-плоскости
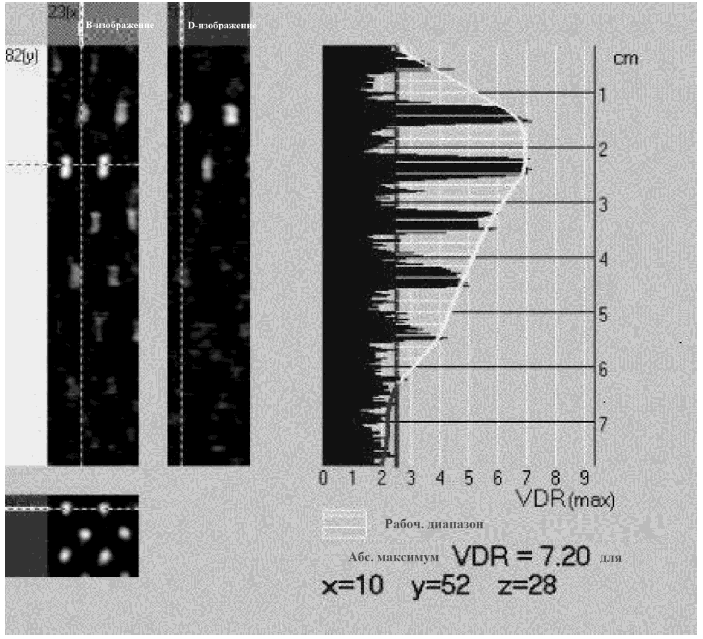
На рисунке А.10 показано:
слева - B-, C-, D-плоскости для трехмерных значений ![]() , которые были получены, исходя из информационной шкалы серого ультразвуковых изображений;
, которые были получены, исходя из информационной шкалы серого ультразвуковых изображений;
справа - для набора ROI выбранных из следующих друг за другом C-плоскостей значения VDR(max) показаны как функция глубины. Положение абсолютного максимума VDR приведено в координатах XYZ.
Примечание - и
![]() отображаются как основная информация без количественной шкалы оценки, потому что характеристики частей приема сигнала УЗДП весьма разнятся и сравнение УЗДП А с УЗДП В невозможно. Сравнимы лишь различные нахождения пустот в рамках одного УЗДП.
отображаются как основная информация без количественной шкалы оценки, потому что характеристики частей приема сигнала УЗДП весьма разнятся и сравнение УЗДП А с УЗДП В невозможно. Сравнимы лишь различные нахождения пустот в рамках одного УЗДП.
На рисунке А.10 показаны различные варианты изображений в градациях серого в трех взаимно перпенднкулярных B-, D-, C-плоскостях. Три элемента, находящиеся справа, используемые в формуле (А.2), показаны как функция глубины (для последовательности -плоскостей):
,
![]() равны максимальным значениям
равны максимальным значениям ![]() и VDR(max).
и VDR(max).
Обратите внимание, что при использовании значений C-плоскостей теряется необходимость в соответствии ультразвукового пучка пустотам. Для вычислений можно использовать максимальное значение от УЗ-пучка, совпадающего с пустотой.
А.8 Интерпретация геометрии
На рисунке А.11 показано прохождение ультразвукового луча через искусственные кисты фантома. На рисунке А.12 показана связь между геометрией датчика (сканера) и изображениями B-, D- и C-плоскостей на рисунке А.11. Ультразвуковой пучок показан в определенный момент сканирования. Некоторые пьезокристаллы в датчике способствуют фокусировке пучка в B-плоскости (плоскости сканирования). Фокусировка на вертикальной плоскости получается из-за конструкции пассивной линзы. УЗДП вызывает перемещение УЗ-луча в B-плоскости, а электрический привод перемещает датчик, обеспечивая таким образом движение в D-плоскости. Различные C-плоскости получаются из-за задержки УЗ-эхосигнала.
|
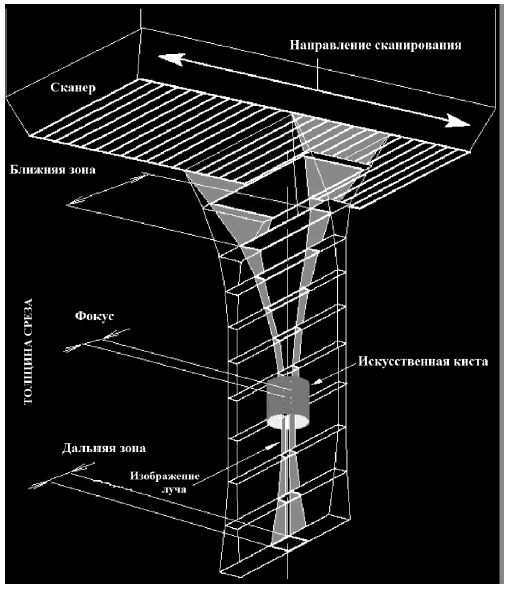
Прохождение ультразвукового пучка через искусственные кисты в фантоме
Рисунок А.11 - Описание работы элементов УЗ-датчика и УЗ-пучка
|
Слева - B-, D-, C-плоскости с изображенными пустотами, отображенными по глубине;
справа - схема B-, D-, C-плоскостей
Рисунок А.12 - Схематическое изображение B-, D-, C-плоскостей
А.9 Возможность обнаружения пустоты с помощью измерения VDR
|
B- , D-, C-плоскости и выбранные ROI, 3 и 1,5 мм, в C-изображениях. Диапазон по глубине показан на B- и D-изображениях.
Рисунок А.13 - Изображения, полученные на трехмерном фантоме
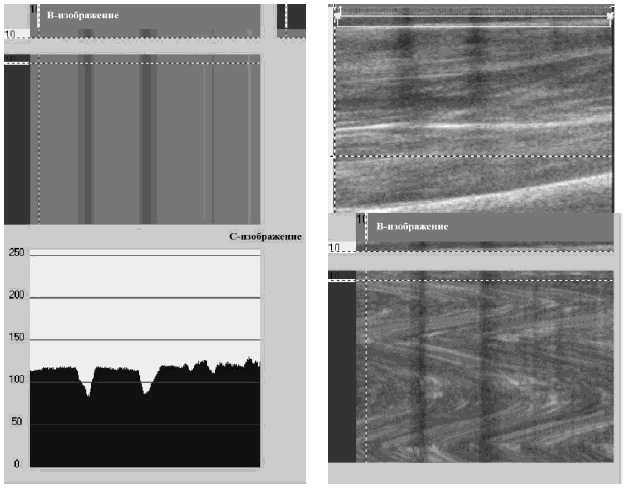
Объемная визуализация на изображении фантома представлена как B-, C- и D-изображения в сечениях по осям "x y z". Три видимые линии в B-, D-, C-изображениях показывают пересечения плоскостей. На C-изображении могут быть определены три области, содержащие пустоты различного размера (см. 6.4). ROI, выделенные вручную и расположенные на B-, C-изображениях (прямоугольники), определяют пустоты, требуемые для измерения VDR (см. рисунок А.13). Какие пустоты будут включены в ROI, зависит от частоты датчика (см. 6.4). Полоса в правой части рисунка А.13 необходима для калибровки толщины среза (два среза равны 10 мм) изображения фантома относительно коэффициента масштабирования УЗДП. На рисунке А.14 B-, D-, C-изображения отображаются в инвертированной шкале градаций серого для лучшей визуализации; рабочий диапазон VDR по глубине показан на рисунке А.14 справа.
|
Слева - B-, D-, C-изображения;
справа - рабочий диапазон VDR по глубине. B-, D-, C-изображения отображаются в инвертированной шкале градаций серого для лучшей визуализации
Рисунок А.14 - B-, D-, C-изображения и VDR
| ||||
а) Пример: криволинейная решетка (40-мм радиус, 3,5 МГц) с приемлемыми значениями VDR. | b) Пример: криволинейная решетка (40-мм радиус, 3,5 МГц) с неудовлетворительными значениями VDR. | |||
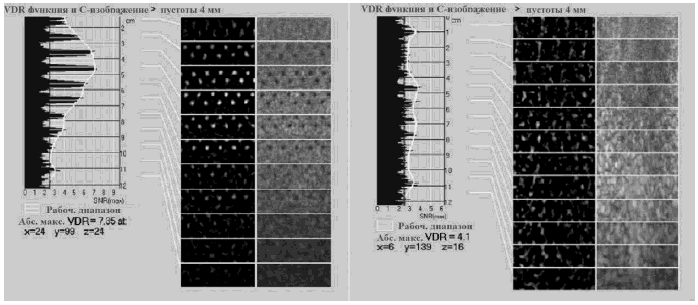
Рисунок А.15 - Значения VDR
По рисунку А.15 следует отметить следующие особенности:
а) - диаграмма в левой части демонстрирует результаты тестирования для датчика с криволинейной решеткой элементов, 40-мм радиус, 3,5 МГц, с рассчитанными значениями VDR обнаруженных пустот диаметром 4 и 2,5 мм. Разделенные изображения на правой стороне (C-изображения на глубинах, показанных горизонтальными линиями) показывают различимость пустот. Уровни серого слева инвертированы для лучшей визуализации. Срок эксплуатации датчика составлял 3 г.
b) - диаграмма в левой части демонстрирует рассчитанные значения VDR для пустот диаметром 4 и 2,5 мм и в диапазоне между 4 и 5 см по глубине. Разделенные изображения на правой стороне (C-изображения на глубинах, показанных горизонтальными линиями) показывают, что артефактных сигналов больше, чем различимость пустот.
Примечание - Прежде чем приступить к испытаниям, все криволинейные решетки элементов должны быть проверены на однородность, как описано в приложении D.
|
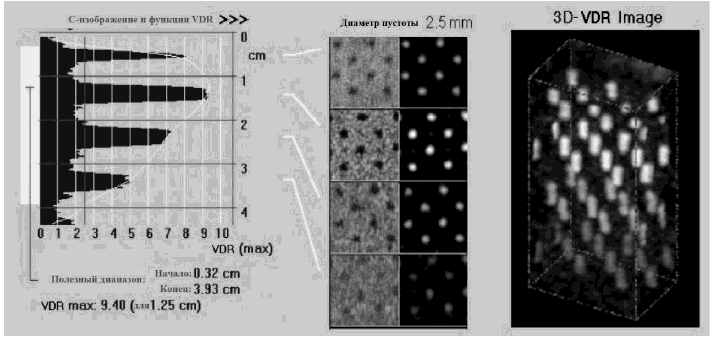
Рисунок А.16 - Пример: линейный датчик, 13 МГц
На рисунке А.16 показан рабочий диапазон линейного датчика (13 МГц) и четкое изображение обнаруженных пустот диаметром 2,5 и 1 мм вместе с изображением рендеринга наблюдаемых пустот. Рендеринг является частью ПО и делает визуальную оценку измерения VDR более информативной.
А.10 Интерпретация параметра
А.10.1 Характерные особенности
Следующий пример, показанный на рисунке А.17, характерен для линейного датчика (3,5 МГц).
|
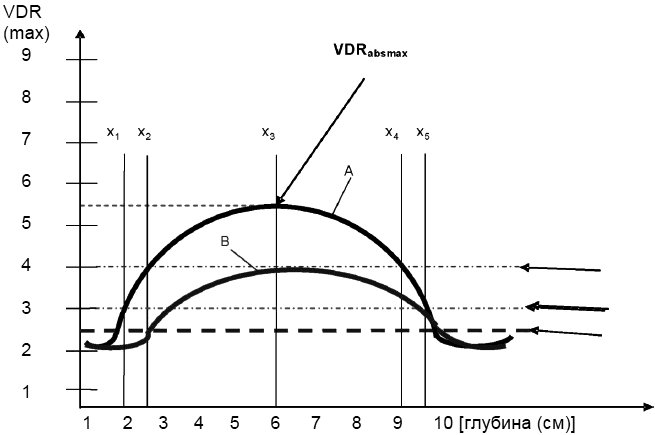
Рисунок А.17 - Интерпретация параметра VDR
По рисунку А.17 необходимо отметить следующие особенности:
- VDR(max) функция A (верхняя кривая):
кривая определяет коэффициент обнаружения пустот;
это типовая кривая для хорошо работающего линейного датчика;
![]() является переменной величиной и зависит от характеристик работы датчика, его производителя и типа;
является переменной величиной и зависит от характеристик работы датчика, его производителя и типа;
глубина ![]() - переменная величина и зависит от выбора шкалы (масштаба) для УЗДП и характеристик соответствующего датчика;
- переменная величина и зависит от выбора шкалы (масштаба) для УЗДП и характеристик соответствующего датчика;
верхняя кривая представляет функцию VDR(max) для диапазона глубин от до
;
положение глубины ![]() со значением
со значением соответствует акустической точке фокуса системы в целом;
- VDR(max) функция B (нижняя кривая):
является возможной кривой для измерений подобного линейного датчика с центральной частотой 3,5 МГц, но с значительно более низкой акустической мощностью (![]() 4,0). Датчик достиг эмпирического предела применимости в диагностике;
4,0). Датчик достиг эмпирического предела применимости в диагностике;
- пороговые значения VDR:
эмпирический порог для измерений по обнаружению пустот лежит на ![]() 2,5 (нижняя пунктирная линия). Эта линия соответствует пределу шума, и информация об изображении ниже этого предела отсутствует;
2,5 (нижняя пунктирная линия). Эта линия соответствует пределу шума, и информация об изображении ниже этого предела отсутствует;
эмпирический порог для визуального распознавания пустот представляет собой VDR(max), приблизительно равный трем (штрих-пунктирная линия);
значения VDR(max) выше заданного порога включают в себя полный рабочий диапазон УЗДП с соответствующим датчиком. Этот диапазон характеризуется обнаружением пустот с размерами, пригодными для постановки диагноза;
эмпирический порог для хорошего и безопасного визуального распознавания пустот представляет собой VDR(max) приблизительно равный четырем (штрих-пунктирная линия). Значения VDR(max) выше заданного порога включают в себя оптимальный рабочий диапазон УЗДП с соответствующим датчиком. Этот диапазон характеризуется хорошим распознаванием пустот необходимых размеров.
А.10.2 Насыщение
Малые и большие пустоты формируют на профиле серой шкалы похожие клиновидные фигуры (см. рисунок А.18). Больший клин "вырезан" по форме локальной динамической кривой. Для УЗДП с большим локальным динамическим диапазоном насыщение возможно только при низком усилении сигнала. Для сравнения качества аналогичных УЗДП и типов датчиков параметр ![]() не может использоваться как единственный для оценки качества. Оценка качества зависит от обнаружения пустот определенных размеров относительно соответствующей частоты преобразователя и предельных значений VDR (см. А.10.1).
не может использоваться как единственный для оценки качества. Оценка качества зависит от обнаружения пустот определенных размеров относительно соответствующей частоты преобразователя и предельных значений VDR (см. А.10.1).
|
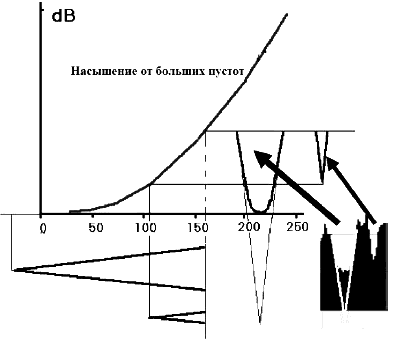
Рисунок А.18 - Интерпретация насыщения (диапазон серой шкалы от 0 до 255)
Изображения на рисунке А.19 показывают эффект насыщения, который можно наблюдать по форме огибающей для пустот размером 2,5, 3,0 и 4,0 мм для функции распределения VDR в зависимости от глубины. Формы огибающих меняются, т.к. VDR(max) не могут достичь ожидаемых значений. Насыщение проходит мягко и незаметно. Далее показано, как происходит насыщение в устаревших типах УЗДП или в современных УЗДП с низким локальным динамическим диапазоном ниже 50 дБ.
| ||
a) Пустоты 2,5 мм | b) Пустоты 3,0 мм | с) Пустоты 4,0 мм |
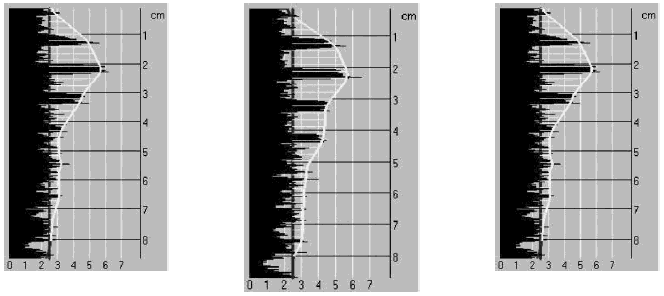
Рисунок А.19 - Эффект насыщения
|
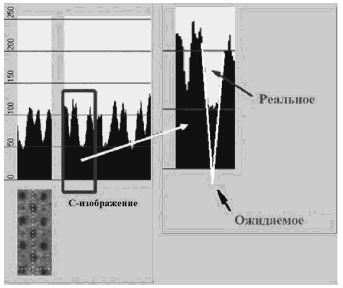
Рисунок А.20 - Анализ области пустоты
Небольшие пустоты отображаются на профиле серой шкалы в форме "клиньев" (см. рисунок А.20). Большие пустоты, однако, "обрезаны", появляются в неполноразмерном, ожидаемом виде. Причиной может служить:
- насыщение из-за ограниченного динамического диапазона;
- боковые лепестки и артефактные сигналы от решетки, которые "наполняют" пустоту;
- одновременное действие насыщения и эхосигналов боковых лепестков.
| |
a) Локальная динамическая кривая | b) Ожидаемая огибающая кривая |
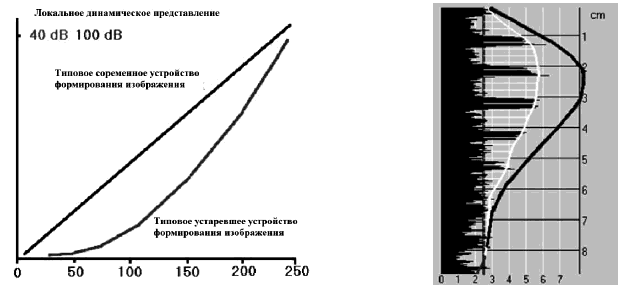
Рисунок А.21 - Локальный динамический диапазон
Большинство старых УЗДП имеют ограниченный локальный динамический диапазон от 40 до 50 дБ, и насыщение происходит на "нулевом уровне". К сожалению, у многих УЗДП для подавления электронных помех "нулевой уровень" поднят до значений от 30 до 50 дБ [см. рисунок А.21а)].
Старые и новые УЗДП отличаются своими локальными динамическими кривыми. На рисунке А.21b) показано изображение ожидаемой огибающей VDR (темная кривая), если бы не было насыщения. Современные УЗДП имеют настраиваемый локальный динамический диапазон от 40 до 120 дБ. Более старые УЗДП имеют ограниченный динамический диапазон от 40 до 50 дБ.
Приложение B
(справочное)
Описание системы
Оборудование, необходимое для проведения испытаний УЗДП, состоит из:
- фантома на основе ТИМ с искусственными кистами для трехмерного отображения;
- платформы с электрическим приводом и адаптером(ами) для фиксации различных типов датчиков во время измерения, как описано в А.3;
- дигитайзера или устройства захвата кадров для преобразования изображений фантома, полученных в режиме реального времени с доступных выходов УЗДП на ноутбуке или ПК (VHS, S-VHS, VGA, DVI2USB);
- ПО для установки дигитайзера или устройства захвата кадров с соответствующей иконкой;
- ПО для сбора, обработки, протоколирования данных с соответствующими иконками;
- ПО автокорреляционного измерения при определении осевой, азимутальной и вертикальной разрешающей способности для данного датчика в любой точке слоев ослабления на соответствующей глубине в диапазоне визуализируемых изображений фантома (см. рисунок С.2);
- ПО для измерений однородности элементов решетки датчика для линейных и конвексных датчиков, потерь на элементах до измерения VDR.
Приложение C
(справочное)
Обоснование
С.1 Общие положения
Было разработано множество методов для определения параметров качества изображения УЗДП тогда, когда механические УЗДП с датчиком с одноэлементной пьезокристаллической решеткой были основными.
С появлением многоэлементных решеток датчиков (линейные, конвексные, фазированные, матричные) ситуация существенно изменилась. Касательно одноэлементных датчиков термин "боковые лепестки" был почти неизвестен и очень редко использовался.
У небольших пьезокерамических дисков боковые лепестки формируются на краях. С появлением техники для проведения аподизации (или снижения чувствительности на краях диска преобразователя) произошло сильное подавление боковых лепестков. Массивы элементов решетки имеют гораздо больше "боковых поверхностей", которые формируют больше боковых лепестков. "Лепестки решетки" - известная с появлением технологии массивов элементов проблема. При соблюдении соответствующих требований геометрии массивов (шаг) и акустическом согласовании можно снизить влияние "лепестков решетки" и других боковых лепестков до приемлемой величины. До настоящего времени не была прекращена практика визуальной оценки качества изображения УЗДП. Многие параметры качества изображения могут быть измерены автоматически или полуавтоматически. Для обработки цифровых данных изображения необходимо небольшое интерактивное вмешательство.
Если основной задачей является как можно более точное и быстрое измерение параметров, то выбор технических и программных средств должен быть обусловлен этими требованиями. Сегодняшние принципы измерения основаны на более разумном выборе измерительных мишеней в тест-объектах и фантомах с соответствующей обработкой УЗ-изображений.
Перед выполнением измерения VDR рекомендуется провести проверку на однородность (см. приложение D). Проверка на однородность может быть частью ПО для измерения VDR и может быть осуществлена без фантома, например с помощью in vivo измерений на предплечье.
С.2 Параметры качества изображения УЗДП
Описание параметров можно найти в [2] и [12].
С.3 Автокорреляционная функция
Другое использование фантома - это отображение вертикальной, азимутальной и осевой автокорреляционных функций (АКФ).
Автокорреляция [14] по одному из трех измерений определяется как:
![]() . (C.1)
. (C.1)
АКФ является практическим ресурсом для определения вертикального размера, не зависящего от измерения VDR. Подобные корреляции определены для азимутальных (ACwAZ) и аксиальных (ACwAx) направлений с помощью ТИМ трехмерного фантома. На рисунке С.1 показан пример измерений на линейном датчике (5 МГц) для всех трех направлений на глубине 4,57 см.
|
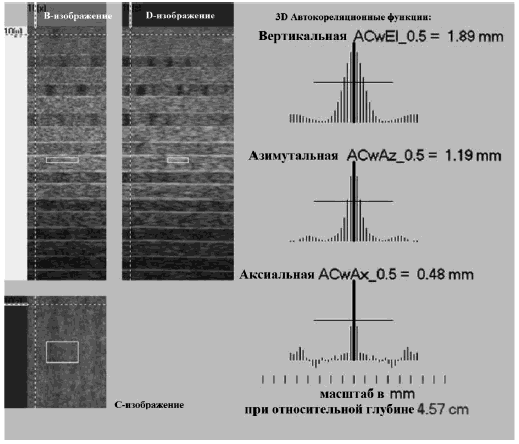
Рисунок С.1 - Функция автокорреляции
АКФ является частью ПО и применима для определения осевого, азимутального и вертикального разрешения независимо от измерения VDR и постобработки. Автокорреляция использует спекл-информацию от отраженного назад УЗ-сигнала. Любая постобработка, которая меняет спекл-характеристики, будет сокращать или уничтожать информацию, полученную в результате этой процедуры. Процедура заключается в следующем.
Выберите изображение 3D-фантома и поместите на ROI, как показано на слое ослабления изображения B-плоскости; соответствующие изображения будут автоматически отображаться в C- и D-плоскости. ROI может быть размещена на любой глубине в зависимости от масштаба по глубине. Результаты АКФ будут отображаться на графике вместе с соответствующими значениями.
Примечание - так как вся необходимая информация собирается с помощью ПО, то использование этого корреляционного метода [14] может дать дополнительную информацию о свойствах датчика. Детальная оценка интерпретации результатов корреляции выходит за рамки этого документа.
| |
a) АКФ на глубине 4,06 см | b) АКФ на глубине 9,08 см |
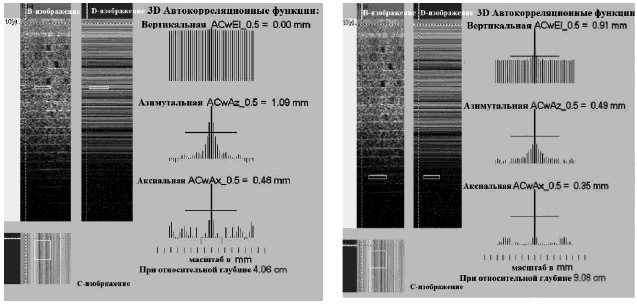
Рисунок С.2 - Функция автокорреляции (зависимость от глубины)
Задав ROI [см. рисунок С.2a)] в зоне фокуса, значение АКФ в вертикальном направлении близко к 1, электронными шумами можно пренебречь.
Задав ROI [см. рисунок С.2b)] в дальней зоне, значение АКФ в вертикальном направлении будет меняться. Если значение близко к 0,5, то оно может быть рассмотрено как глубина проникновения.
|
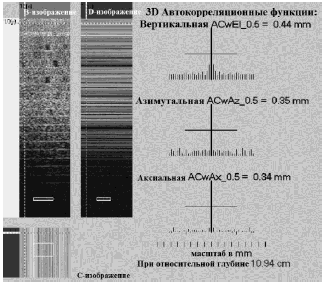
Рисунок С.3 - Функция автокорреляции на глубине 10,94 см
Рисунки С.2 и С.3 иллюстрируют АКФ на различных глубинах. Как видно из этих рисунков, последовательность УЗ-изображений получена из одного и того же пространственного положения и без каких-либо изменений на B-изображениях, кроме электронных шумов. АКФ в D-направлении с сильным эхосигналом приблизительно равна 1, т.к. электронный шум пренебрежимо мал. При большей глубине электронный шум начинает преобладать и эхосигнал постепенно исчезает. Значение автокорреляции находится в диапазоне от 1 до 0. На глубине, где эхосигналы полностью исчезают, ожидаемая АКФ - трехмерная дельта-функция (функция Дирака). В области, где автокорреляция составляет около 0,5, вклад эхосигнала приблизительно равен электронному шуму. Среднюю точку этого диапазона можно рассматривать как глубину проникновения.
Приложение D
(справочное)
Проверка однородности
D.1 Основные положения
Метод проверки однородности является методом измерения, предоставляющим информацию об однородности электроакустических параметров отдельных элементов датчика.
Большинство многоэлементных датчиков работают в апертурном режиме, т.е. каждый из переданных и полученных пучков формируется совместным действием более чем одного элемента (от десяти до нескольких сотен).
Переданный фронт УЗ-волны формируется путем интерференции отдельных волновых фронтов, образованных конкретными элементами в апертуре. Разные времена импульсов возбуждения конкретных элементов и изменение числа элементов в апертуре - результат нестабильности положения точки фокуса переданного пучка. Схожее управление сигналом используется для динамической фокусировки во время приема сигнала. Это значит, что каждый пучок, формируемый апертурой, состоит из более чем одного элемента. Если один элемент выходит из строя, то все остальные, оставшиеся на апертуре, скрывают это "выпадание" элемента своими сигналами.
Влияние неисправных элементов на качество изображения зависит от отношения числа неработающих элементов к общему количеству элементов. Разрыв на изображении, выражающийся в виде выпавшей УЗ-линии на центральной оси апертуры, появляется, когда все элементы апертуры вышли из строя.
"Проверка однородности" должна быть обязательной частью протокола по определению трехмерного распределения VDR, чтобы показать, выполняется или нет критерий однородности (упоминается в разделе 7 в связи с криволинейными решетками). Измерение трехмерного распределения VDR не делает возможным определение локального дефекта датчика из-за того, что там отображается только максимальное значение VDR для каждой C-плоскости. Локальный дефект вызывает уменьшение VDR только тогда, когда в качестве ROI точно выбрана часть отсканированного объема, затронутая дефектом.
Для обнаружения дефектных частей датчика необходимо выполнять "методику проверки однородности" до измерения трехмерного распределения VDR. Когда дефектная часть обнаружена, проводятся измерения трехмерного распределения VDR в отсканированном объеме, который для получения корректных результатов должен быть ограничен лишь объемом, затронутым дефектом. В противном случае низкое значение VDR спрятано за более высоким значением от "здоровой" части датчика.
Проверку легко провести путем сканирования предплечья, как показано на рисунках D.1-D.6 с линейными или криволинейными типами решеток датчиков. Основное условие для УЗ-изображений высокого качества может быть определено как "одинаковость свойств" всех элементов в решетке или однородность. Первым шагом по проведению оценки качества датчика является нахождение колебаний чувствительности элементов и потерь на элементах.
D.2 Примеры линейных и криволинейных решеток
| ||||
a) Проверка однородности на датчике с линейной или криволинейной решеткой | b) Зафиксированная структура на B-изображении | |||
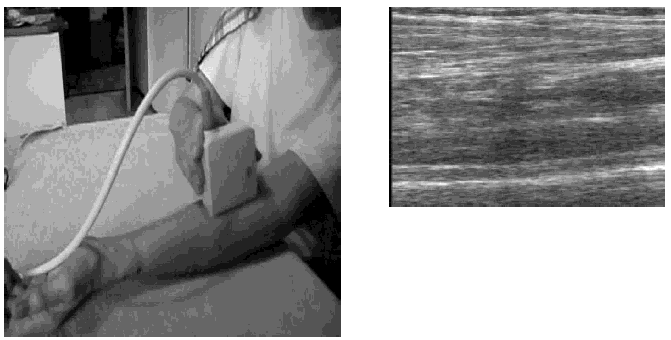
Рисунок D.1 - Проверка однородности
На рисунке D.1a) показано начало теста на однородность: сканирование предплечья для получения примерно 300 сканов путем перемещения соответствующего датчика вперед и назад.
На рисунке D.1b) показаны зафиксированные темные области в кадре изображения, указывающие на нестабильно работающие или неработающие элементы. Для случая визуализируемой фиксированной структуры необходимо дополнительное измерение VDR.
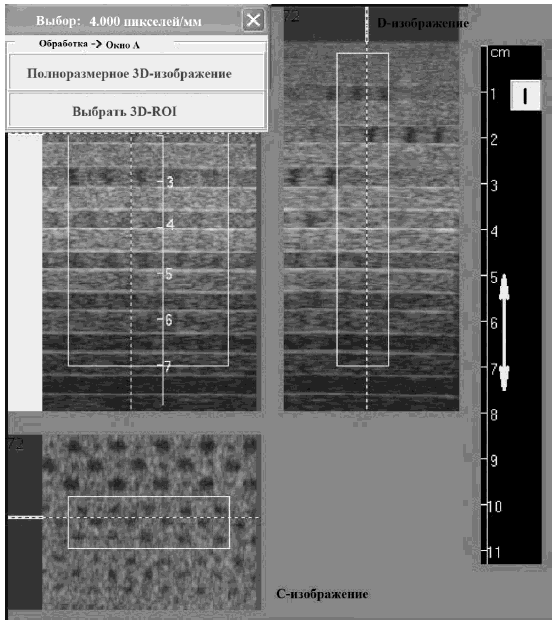
a) B-, D- , C- изображение и фиксированный образ на C-изображении | b) Отображение уровня серого всех элементов решетки |
Рисунок D.2 - Проверка однородности (дополнительные возможности)
На рисунке D.2a) показан фиксированый образ, наиболее хорошо визуализируемый на C-изображении. Темные линии являются результатом неисправности элементов массива или снижения чувствительности элементов.
На рисунке D.2b) C-изображение преобразовывается в профиль шкалы серого, чтобы видеть полную длину массива. Здесь показаны неработающие элементы. Для случая оценки изменений чувствительности элементов необходимо использовать опорный сигнал.
|
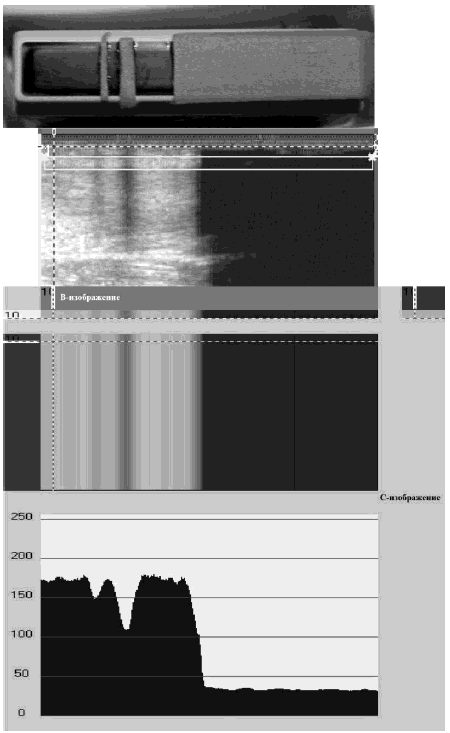
Датчик покрыт небольшими полосками ленты (gznm слоев), имитирующими выключенные элементы. Большая часть ленты имитирует снижение чувствительности.
Изображение, полученное в B-режиме с ROI, отмеченной горизонтальными линиями по всей длине массива. Фиксированный образ с имитацией неработающих элементов.
C-изображение более четко показывает имитацию неработающих элементов.
Профиль шкалы серого показывает неработающие элементы как маленькие или большие клинья и на правой стороне - снижение чувствительности элементов.
Рисунок D.3 - Линейный датчик с контрольной лентой
|
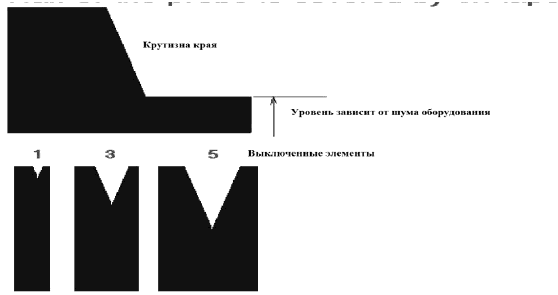
Рисунок D.4 - Интерпретация имитации неисправности датчика, когда его половина покрыта пятью слоями 50-миллиметровой матерчатой ленты
Ожидается, что для половины датчика, покрытого лентой с высоким затуханием (например, пять наложенных друг на друга слоев матерчатой ленты типа TESA 4651, 50 мм), уровень серого будет таким, как схематически показано. Благодаря ленте на изображении плавно сокращается случайная "погрешность рук". Также возможна некоторая крутизна края. Одинаковую крутизну можно ожидать в случае неисправных элементов с характерной формой клина.
|
Слева - верх - изображение с выделенным ROI по длине массива;
низ - фиксированная структура C-изображения;
справа: верх - B-изображение с фиксированной структурой;
низ - благодаря профилю шкалы серого с клиньями показано снижение вклада неисправных элементов
Рисунок D.5 - Неработающие элементы решетки, пример с линейным датчиком
|
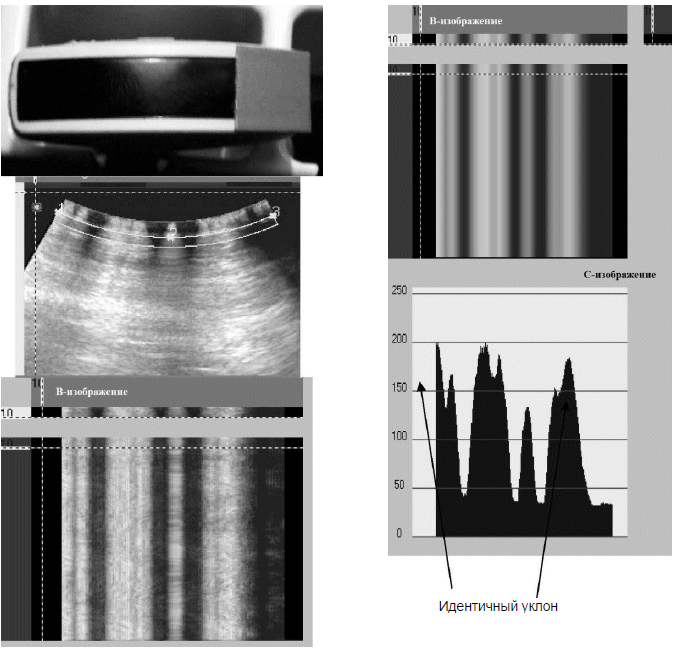
Cлева - верхнее изображение - криволинейная решетка с контрольной лентой, которая показана в ближней зоне отраженного сигнала в нижней части изображения;
среднее изображение - криволинейная решетка с выделенным ROI для ближней зоны детектирования;
нижнее изображение - черные тени обозначают неработающие элементы;
справа - сопоставление верхнего изображения с показанными неработающими элементами на нижнем изображении.
Отраженный сигнал не влияет на визуализацию контрольного уклона для неработающих элементов.
Рисунок D.6 - Пример для датчика с криволинейной решеткой и контрольной лентой
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
IEC 60050-802 | - | * |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. | ||
Библиография
[1] | THIJSSEN, J.M., WEIJERS, G., DE KORTE, C.L. Objective Performance Testing and Quality Assurance of Medical Ultrasound Equipment. Ultrasound in Medicine & Biology, 2007, 33, pp.460-471 |
[2] | Standard for Measuring Performance of Pulse-Echo Ultrasound Equipment, American Institute of Ultrasound in Medicine, AIUM Technical Standards Committee. July 13, 1990, Part II. Digital Methods, Stage 1, AIUM 1995 |
[3] | PROCIAK A. Cell structure and thermal conductivity of rigid polyurethane foams blown with cyclopentane in different molds. PU-MAGAZINE, March 2006, pp.104-106 |
[4] | ROWND J.J., MADSEN E.L., ZAGZEBSKI J.A., FRANK G.R., DONG F. Phantoms and Automated System for Testing the Resolution of Ultrasound Scanners. Ultrasound in Medicine & Biology, 1997, 23, pp.245-260 |
[5] | AIUM Technical Standards Committee Quality Assurance Manual for Grey-Scale Ultrasound Scanners, Stage 2, American Institute of Ultrasound in Medicine, 1995 |
[6] | SATRAPA J., ZUNA I., DOBLHOFF G. Differences of Ultrasound Propagation in Tissue and Tissue Mimicking Materials, Acoustic Imaging, Vol.22, edited by P. Tortoli and L. Massotti, Plenum Press, New York, 1996 |
[7] | SATRAPA J., ZUNA I., DOBLHOFF G. New Quantitative Support by Phantoms in Sonography, Ultrasound World Congress 1995, Proceedings pp.943-946 |
[8] | CLAY, Clarence S., MEDWIN, Hermann. Acoustical Oceanography, John Wiley & Sons 1977 |
[9] | KINSLER, Lawrence E., FREY, Austin R., COPPENS, Allen B., SANDERS, James V. Fundamentals of Acoustics, John Wiley & Sons 1982 |
[10] | ETTER, Paul C. Underwater Acoustics Modelling, Elsevier 1991 |
[11] | VDE-DGBMT Grundlegende Aspekte zur sicheren Anwendung von Ultraschall, Sicherheit und |
[12] | AIUM Recommended Terminology, American Institute of Ultrasound in Medicine, Third Edition, AIUM, 2008 |
[13] | Digital Imaging and Communications in Medicine (DICOM) - Part 1: Introduction and Overview, Nat. Electrical Manufacturers Assoc., Rosslyn, VA, 2004, p.21 |
[14] | DUNN, Patrick F. Measurement and Data Analysis for Engineering and Science. New York: McGraw - Hill, 2005 |
[15] | IEC 60761-1:2002, Equipment for continuous monitoring of radioactivity in gaseous effluents - Part 1: General requirements |
[16] | IEC 61391-1, Ultrasonics - Pulse-echo scanners - Part 1: Techniques for calibrating spatial measurement systems and measurement of system point-spread function response |
[17] | IEC 61391-2, Ultrasonics - Pulse-echo scanners - Part 2: Measurement of maximum depth of penetration and local dynamic range |
[18] | IEC 62270:2004, Hydroelectric power plant automation - Guide for computer-based control |
[19] | IEC 62453-1:2009, Field device tool (FDT) interface specification - Part 1: Overview and guidance |
Позиции [5], [6] и [12] даны исключительно информационно. | |
_______________
Заменен на IEC 62270:2013.
Заменен на IEC 62453-1:2016.
УДК 616.073/43.71:006.354 | ОКС 17.140.50 |
Ключевые слова: изображение, коэффициент обнаружения пустот, обратное рассеяние, пустота, ультразвук, фантом | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}