ГОСТ Р МЭК 61391-1-2011
Группа Т86.9
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ОБОРУДОВАНИЕ МЕДИЦИНСКОЕ УЛЬТРАЗВУКОВОЕ ДИАГНОСТИЧЕСКОЕ
Часть 1
Общие требования к методикам калибровки систем измерения расстояний
Medical ultrasonic diagnostic equipment. Part 1. General requirements for calibration methods for distance measurement systems
ОКС 17.140.50
Дата введения 2012-09-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 ПОДГОТОВЛЕН Всероссийским научно-исследовательским институтом физико-технических и радиотехнических измерений Федерального агентства по техническому регулированию и метрологии на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Управлением метрологии Федерального агентства по техническому регулированию и метрологии
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 21 октября 2011 г. N 479-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 61391-1:2006* "Ультразвук - Эхоимпульсные сканеры - Часть 1: Методика калибровки систем пространственных измерений и измерений функции размывания точки" (IEC 61391-1:2006 "Ultrasonics - Pulse-echo scanners - Part 1: Spatial measurement systems and measurement of system point-spread function response").
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2004 (пункт 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых информационных указателях "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт устанавливает методы калибровки устройств пространственных (линейных) измерений и измерений функции размывания точки приборов ультразвуковой визуализации в диапазоне ультразвуковых частот от 0,5 до 15 МГц. Стандарт распространяется на ультразвуковые сканеры эхоимпульсного типа, такие как:
- сканеры с механическими секторными датчиками;
- сканеры с фазированными секторными датчиками;
- сканеры с линейной электронной решеткой;
- сканеры с секторными датчиками в виде криволинейной электронной решетки;
- сканеры с помещаемым в воду датчиком одного из вышеперечисленных типов;
- системы трехмерного изображения.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты*:
_______________
* В случае датированных ссылок следует использовать только указанные стандарты.
МЭК 61102:1991 Измерение и описание ультразвуковых полей с помощью гидрофонов в диапазоне частот от 0,5 МГц до 15 МГц (IEC 61102:1991, Measurement and characterisation of ultrasonic fields using hydrophones in the frequency range 0,5 MHz to 15 MHz)
МЭК 61685:2001 Ультразвук - Системы измерения кровотока - Тест-объект для имитации кровотока (IEC 61685:2001, Ultrasonics - Flow measurement systems - Flow test object)
3 Термины и определения
В настоящем стандарте использованы следующие термины с соответствующими определениями. Определения и пояснения могут быть найдены в стандартах и технических отчетах [1]-[5].
3.1 сканирование типа А (A-scan): Одномерное представление данных, при котором информация о значениях отраженных сигналов воспроизводится в виде амплитуд сигналов, расположенных по оси ультразвукового пучка, представляемой как ось времени или расстояния.
3.2 средство для акустического контакта (acoustic coupling agent; coupling agent): Материал, как правило в виде геля или жидкости, используемый для обеспечения акустического контакта между датчиком и кожей пациента или между датчиком и тест-объектом.
3.3 частота акустического воздействия (acoustic working frequency): Среднеарифметическое значение частот и
, для которых амплитуда спектра акустических давлений снижается на 3 дБ от амплитуды в его пике (см. 3.4.2 МЭК 61102).
3.4 автоматическая компенсация усиления по времени; ATGC (automatic time-gain compensation; ATGC): Автоматическая регулировка усиления, компенсирующего уменьшение амплитуд эхосигналов, вызванное затуханием амплитуды ультразвукового импульса с глубиной.
3.5 осевая разрешающая способность (axial resolution): Минимальное расстояние вдоль оси ультразвукового пучка между двумя идентично рассеивающими объемами или мишенями на определенной глубине, эхосигналы от которых могут быть разделены между собой.
3.6 коэффициент обратного рассеяния (backscatter coefficient): Средняя акустическая мощность, рассеянная определенным объектом в направлении 180° к падающему пучку, в единичном пространственном угле и от единичного объема, деленная на интенсивность падающего пучка. Предполагают случайное распределение рассеивателей в пространстве. Мощность усредняют по различным пространственным реализациям объемов рассеяния.
Примечание - Коэффициент обратного рассеяния, как правило, представляют в виде площади поперечного сечения единичного объема в направлении 180°.
3.7 контрастность рассеивателей (нормированная) (backscatter contrast (normalized)): Разность между коэффициентами обратного рассеяния двух различных областей, деленная на корень квадратный из произведения двух коэффициентов обратного рассеяния.
3.8 ось пучка (beam axis): Продольная ось пучка эхоимпульсного отклика для какой-либо данной линии сканирования в В-режиме, представляющая собой эхоимпульсный эквивалент оси излучаемого пучка [2].
3.9 сканирование типа В (B-scan): Тип геометрического представления данных, при котором эхо-информация образуется из точек, лежащих в плоскости ультразвукового сканирования, озвучиваемой ультразвуковыми пучками. Ниже см. В-режим.
Примечание - Сканирование типа В - это упрощенный термин сканирования или изображения в В-режиме. См. 3.10.
3.10 изображение, модулированное по яркости [В-режим] (Brightness-modulated display; B-mode): Метод представления информации при сканировании типа В, при котором конкретное сечение объекта визуализации конформно воспроизводится на экране в виде плоскости сканирования, а амплитуда эхосигналов - их локальной яркостью или оптической плотностью изображения ([3]).
3.11 динамический диапазон изображения (displayed dynamic range): Выраженное в децибелах отношение амплитуд максимального эхосигнала, еще не насыщающего изображение, и минимального эхосигнала, еще различимого при определенной регулировке испытуемого сканера.
3.12 разрешение [разрешающая способность] по толщине (elevational resolution): Минимальное расстояние в направлении, перпендикулярном к плоскости ультразвукового сканирования, между двумя одинаково рассеивающими мишенями на какой-либо определенной глубине, эхосигналы от которых могут быть разделены между собой. При описании трехмерного сканирования этот термин используют вместо термина "толщина слоя".
3.13 обзорное поле [поле обзора] (field-of-view): Площадь в плоскости ультразвукового сканирования, озвучиваемая ультразвуковым пучком для получения одного кадра изображения.
3.14 частота кадров (frame rate): Число качаний ультразвукового пучка в поле обзора за 1 с.
3.15 усиление (gain): Отношение выходного сигнала какого-либо усилительного устройства к его входному сигналу, выражаемое, как правило, в децибелах.
3.16 серая шкала (grey scale): Диапазон значений яркости изображения, плавно или ступенчато (не менее чем с тремя дискретными значениями) изменяющихся между двумя крайними значениями (см. [3]).
3.17 разрешающая способность в поперечном направлении [поперечное разрешение] (lateral resolution): Минимальное расстояние в направлении, перпендикулярном к оси пучка, между двумя линейными мишенями, расположенными перпендикулярно к плоскости ультразвукового сканирования, на определенной глубине в тест-объекте с тканеимитирующим материалом, эхосигналы от которых наблюдают разделенными между собой.
3.18 функция размывания линии; LSF (line-spread function; LSF): Трехмерный отклик системы визуализации на высококонтрастную линейную мишень.
3.19 линейная мишень (line target): Цилиндрический отражатель, диаметр которого настолько мал, что системой визуализации его невозможно отличить по амплитуде сигнала от цилиндрического отражателя, на порядок меньшего диаметра. Обратное рассеяние от эталонной линейной мишени рекомендуется представлять простой функцией частоты во всем исследуемом частотном диапазоне.
3.20 М-режим [режим движения во времени] (M-mode; time-motion mode): Метод представления информации о результатах сканирования типа М, при котором перемещение структур вдоль фиксированного направления оси пучка изображается на экране в виде положения этих структур на линии, перемещающейся по экрану, с целью показать изменение времени приема эхосигналов.
3.21 сканирование типа М [сканирование движущихся объектов] (M-scan; time-motion scan): Способ сканирования, при котором эхоинформация о движении объекта составляется по точкам, лежащим вдоль оси пучка. Для представления этой информации используется изображение в М-режиме.
3.22 номинальная частота (датчика) (nominal frequency (of a transducer)): Частота акустического воздействия преобразователя, указанная разработчиком или изготовителем (см. [3]).
3.23 пиксел [элемент изображения] (pixel; picture element): Наименьший размер пространственного элемента или ячейки цифрового двухмерного изображения. Каждый пиксел имеет адрес (координаты и
, соответствующие его положению в матрице) и определенный уровень яркости.
Примечание - Пиксел - это сокращение термина "элемент изображения" (picture element).
3.24 точечная мишень (point target): Отражатель, размеры которого столь малы, что системой визуализации его невозможно отличить по амплитуде сигнала от подобного отражателя, на порядок меньшего размера. Обратное рассеяние от эталонной точечной мишени представляет собой простую функцию частоты во всем диапазоне исследуемых частот.
3.25 функция размывания точки; PSF (point-spread function; PSF): Характерный трехмерный отклик системы визуализации на точечную мишень высокой контрастности.
Примечание - Не может быть общей характеристики PSF для ультразвуковой системы в целом, так как функция изменяется с глубиной и параметрами настройки системы на фокус и частоту.
3.26 линия сканирования (scan line): Одна из линий сканирования, формирующих изображение в режиме В на мониторе ультразвукового сканера. Каждая из них представляет собой огибающую линию сканирования типа А, в которой амплитуды эхосигнала преобразованы в значения яркости.
3.27 плоскость сканирования (scan plane): Плоскость, содержащая линии ультразвукового сканирования (см. МЭК 61102, определение 3.38).
3.28 боковой лепесток (side lobe): Вторичный пучок, генерируемый ультразвуковым преобразователем и отклоняющийся от направления главного пучка. Как правило, интенсивность боковых лепестков существенно меньше интенсивности в главном (центральном) пучке.
Примечание - Наличие боковых лепестков может вызвать ложные отраженные сигналы на ультразвуковом изображении.
3.29 толщина слоя (slice thickness): Толщина слоя в направлении, перпендикулярном к плоскости ультразвукового сканирования, на определенной глубине в тест-объекте и в той его области, из которой получают изображение акустической информации.
3.30 спекл-структура (speckle pattern): Пятнистое изображение, вызванное интерференцией сигналов, отраженных рассеивающими центрами в теле или тканеимитирующем материале.
3.31 размер пятна (spot size): Ширина пятна PSF или LSF на уровне минус 6 дБ или другом обусловленном уровне.
3.32 мишень (target): Объект, озвучиваемый ультразвуковым пучком.
Примечание - Примеры мишеней:
a) устройство, специально разработанное для помещения в ультразвуковое поле при измерении радиационной силы;
b) рассеиватель или группа рассеивателей, приводящие к возрастанию сигнала в пределах ультразвукового пучка;
c) проволока или нить в тест-объекте.
3.33 тест-объект (test object): Устройство, содержащее одну или несколько групп объектов заданной конфигурации, внедренных в тканеимитирующий материал или другую среду.
3.34 поверхность сканирования тест-объекта (test object scanning surface): Поверхность на тканеимитирующем тест-объекте, на которой рекомендуется располагать преобразователь во время испытаний.
3.35 компенсация усиления по времени; TGC (time-gain compensation; TGC): Изменение усиления усилителя со временем, вводимое для компенсации потерь амплитуды отраженного сигнала, возрастающих с глубиной из-за затухания в теле.
3.36 тканеимитирующий материал (tissue-mimicking material): Материал, для которого скорость распространения (скорость звука), характеристики отражения, рассеяния и затухания эквивалентны характеристикам мягких тканей в диапазоне ультразвуковых частот от 0,5 до 15 МГц.
3.37 излучаемое ультразвуковое поле (transmitted ultrasound field): Трехмерное распределение ультразвуковой энергии, распространяющейся от ультразвукового преобразователя.
3.38 линия ультразвукового сканирования (ultrasonic scan line): Для систем автоматического сканирования это ось пучка как для одного, так и для группы элементов ультразвукового преобразователя при одиночном или множественном возбуждении ультразвукового преобразователя [4].
3.39 ультразвуковой преобразователь [датчик] (ultrasonic transducer): Устройство, способное преобразовывать электрическую энергию в механическую в ультразвуковом диапазоне частот и/или механическую в электрическую (см. МЭК 61102, определение 3.58).
Примечание - В настоящем стандарте под ультразвуковым преобразователем подразумевают сложное устройство, включающее в себя один или несколько элементов преобразователя, а также устройства для механического и электрического демпфирования и согласования.
3.40 группа элементов ультразвукового преобразователя (ultrasonic transducer element group): Группа элементов ультразвукового преобразователя, возбуждаемых совместно для излучения одного акустического импульса (см. МЭК 61102, определение 3.60).
3.41 ультразвук (ultrasound): Акустические колебания с частотой, выше верхнего предела слышимого звука (около 16 кГц) [5].
3.42 ультразвуковой пучок [группа принимаемых отраженных сигналов] (ultrasound beam (pulse-echo response pattern)): Область, примыкающая к поверхности преобразователя, от которой может быть принят сигнал, отраженный от определенной мишени, испытуемым сканером, работающим в несканирующем режиме. Ультразвуковой пучок следует отличать от излучаемого ультразвукового поля.
3.43 воксел (voxel): Наименьший единичный участок пространства или размер ячейки трехмерного матричного представления изображения. Каждый воксел имеет адрес (координаты ,
,
), соответствующий его положению в матрице, и определенную яркость и/или цвет.
3.44 рабочая жидкость (working liquid): Водный (или на основе другого растворителя) раствор, который имеет скорость звука 1540 м/с (см. МЭК 61685).
4 Обозначения
- площадь поверхности; | |
- площадь поперечного сечения; | |
- длина большой полуоси для данной половины ( | |
- среднее из длин малых осей эллипсоида или яйцеобразного объекта; | |
- частота акустического воздействия; | |
- волновое число ( | |
- периметр поперечного сечения яйцеобразного объекта; | |
- отношение среднего из измеренных расстояний к их действительным значениям; | |
- калибровочный коэффициент поперечных размеров; отношение среднего расстояния между нитями к их действительным значениям в горизонтальном направлении; | |
- отношение среднего расстояния между нитями к их действительным значениям в вертикальном направлении; | |
- радиус проволочной или нитевидной мишени; | |
- объем яйцеобразного объекта; | |
- удельный акустический импеданс материала проволочной или нитевидной мишени; | |
- удельный акустический импеданс окружающей среды (рабочей жидкости или тканеимитирующего материала); | |
- | |
- сечение обратного рассеяния точечной мишени. |
5 Общие условия измерений
Испытания проводят при следующих условиях окружающей среды:
- температура | (23±3) °С; |
- относительная влажность | от 45% до 75%; |
- атмосферное давление | от 86 до 106 кПа. |
В настоящем стандарте предусмотрено использование тест-объектов различных конструкций. Поэтому в отчете по испытаниям необходимо указать данные используемого тест-объекта. В качестве стандартных рекомендуется выбирать:
a) среду: рабочую жидкость или тканеимитирующий материал [6];
b) использование средства для акустического контакта (контактного геля): тонкой прокладки или геля с соответствующей скоростью звука;
c) геометрию: одну или несколько моделей, рассмотренных в приложении А, В или С, с различными расстояниями между мишенями.
Рабочая жидкость должна иметь следующие характеристики:
- скорость звука - (1540±15) м/с;
- низкое затухание - (<0,1 дБ см
МГц
);
- пренебрежимо малое рассеяние (см. МЭК 61685).
Для получения требуемого значения скорости звука в рабочей жидкости см. [7], [8].
Тканеимитирующий материал должен иметь следующие характеристики:
- скорость звука - (1540±15) м/с;
- затухание - (0,5±0,05) дБ см
МГц
в частотном диапазоне, требуемом для испытаний;
- рассеяние - небольшое, значение не указывают.
Примечание - Если испытуемый ультразвуковой сканер разработан для какого-либо частного применения, при котором значение скорости звука отличается от 1540 м/с, то в тест-объекте рекомендуется применять среду с этим значением скорости звука, и такие изменения следует фиксировать в отчете по результатам испытаний.
Более конкретные требования к свойствам тканеимитирующего материала см. в МЭК 61685, приложение D.
Тканеимитирующий материал, как правило, защищают тонким покрытием. Его толщину и акустические свойства (затухание и скорость звука) следует указывать в отчете, если они влияют на результаты измерений.
Для контакта с этим покрытием на преобразователь наносят слой контактного геля. Если его толщина достаточно мала по сравнению с длиной волны, то влиянием геля допускается пренебречь. Если слой толстый, что необходимо, например, для конвексного датчика, то скорость звука в этом материале должна быть равной (1540±15) м/с.
Рассматривают два эффекта влияния скорости звука в среде: если скорость больше 1540 м/с, то измеряемые расстояния по оси пучка представляются пропорционально укороченными, а фокус преобразователя перемещается дальше от преобразователя. Если скорость будет меньше, наблюдается обратный эффект. Эффект перемещения фокуса наиболее важен для преобразователей с большей апертурой. Поэтому использование правильных значений скорости звука (1540±15) м/с наиболее важно при оценке геометрических искажений изображения, рассмотренной в разделах 6 и 7. В соответствии с разделом 8, где изложены измерения PSF, отклонения скорости звука от стандартных значений не столь важны, если апертура преобразователя не слишком большая.
При рассмотрении процедур сканирования термины "горизонтальный" и "вертикальный" подразумевают озвучивание тест-объекта сверху и соответствующее этому изображение на мониторе сканера.
6 Калибровка двухмерных (2D) измерительных систем
6.1 Методы испытаний
Для проведения испытаний требуется следующее оборудование:
а) тканеимитирующие тест-объекты с мишенями, расположенными в точно определенных местах;
b) тканеимитирующий тест-объект, содержащий трехмерный объект с точно известными размерами;
c) бак с дегазированной рабочей жидкостью.
Технические требования к этим устройствам приведены в приложениях.
6.2 Измерительные приборы
6.2.1 Общие положения
Указанные в этом подразделе приборы предназначены для проведения испытаний ультразвуковых сканеров непосредственно в клиниках. Эти приборы должны обеспечивать объективный и воспроизводимый сбор и анализ данных.
6.2.2 Цифровые приборы
В связи с тем, что некоторые пространственные измерения могут быть выполнены при использовании цифрового электронного штангенциркуля, то для получения объективных и воспроизводимых результатов оценки ультразвуковые изображения рекомендуется представлять в цифровом виде. Большинство современных приборов ультразвуковой визуализации воспроизводят изображения в цифровом виде, и они могут быть использованы для измерений. Такие пространственные измерения может выполнять и оценивать их результаты в клинических условиях оператор этих систем. Однако при измерениях PSF и LSF необходимо иметь зависимость линейной амплитуды эхосигнала от числовых значений на оцифрованном изображении или создать разреженное представление этой зависимости с помощью калиброванных отражателей, как это описано в [19]. Для таких систем более подходят аналоговые значения, обеспечивающие большую точность в случаях, когда важны амплитуды сигнала в линейном представлении. Для оцифровки результатов в системах с аналоговыми изображениями допускается использовать сетку с адекватным пространственным разрешением (не менее 512х512 пикселей) и серую шкалу (не менее 256 оттенков). Следует также использовать и адекватное программное обеспечение для выполнения описанных ниже простых измерений по цифровым ультразвуковым изображениям тест-объектов. Аналого-цифровой преобразователь должен быть линейным с погрешностью <1% для 75% измеряемого размера изображения и <3% для полного диапазона серой шкалы; он должен обеспечивать годовую стабильность <5% полного диапазона воспроизводимых сигналов.
Программное обеспечение цифрового изображения должно помочь пользователю устанавливать курсор в определенное место на мониторе и получать при этом адрес пикселя (координаты строки и столбца). Это позволит пользователю калибровать цифровое изображение по истинным расстояниям, записанным на ультразвуковых изображениях. Если цифровой преобразователь калиброван, то цифровые ультразвуковые изображения могут стать предметом для более подробного анализа, чем тот, который доступен непосредственно по экрану. Программное обеспечение цифрового изображения позволяет определить и значение яркости для каждого пикселя по его адресу.
Для калибровки цифрового изображения по расстояниям в пикселях (т.е. калибровки цифрового преобразователя) следует:
a) отсканировать тест-объект с соответствующей рабочей жидкостью и получить его изображение, зарегистрировать уровень усиления для этого изображения, выполнять все последующие измерения и сличения при том же самом уровне усиления;
b) измерить с помощью электронного штангенциркуля (калипера) известные расстояния между положениями двух проволочек или нитей с целью подтвердить, что значения измеренных расстояний соответствуют действительным значениям. Измерения следует выполнить как для пары проволочек или нитей, расположенных по вертикальной линии, так и для проволочек или нитей, расположенных по горизонтальной линии. При обнаружении разницы с действительными значениями следует провести подстройку сканера перед последующими измерениями. Если такая подстройка невозможна, то в перечислении d) (см. ниже) следует использовать действительные значения расстояний;
c) оцифровать отсканированное изображение и, используя программное обеспечение, получить адреса пикселей, соответствующих положению каждой проволочки, для измерения в пикселях расстояний между парами проволочек;
d) повторить эти измерения для каждой из проволочек в тест-объекте, измеряя расстояния как по вертикали, так и по горизонтали. Разделить каждое полученное при измерении значение расстояний на его действительное значение в миллиметрах. Усреднить эти отношения; среднее отношение, выраженное в пикселях на миллиметр, и будет результатом калибровки цифрового преобразователя. В дальнейшем оно может быть использовано для определения относительных расстояний во всех цифровых изображениях, выполненных данным сканером для данного его усиления. См. [10].
6.2.3 Тканеэквивалентные тест-объекты
Тканеэквивалентные тест-объекты должны содержать структуры, обеспечивающие проведение измерений:
a) прямой линии;
b) кривой линии;
c) окружности;
d) площади;
e) объема;
f) искажений изображения;
g) для калибровки режима М.
Примеры этих тест-объектов приведены в приложении В.
6.3 Настройка аппаратуры для испытаний
6.3.1 Общие положения
Поскольку аппаратура может работать во многих режимах в сочетании с различными преобразователями, проведение испытаний для каждого из режимов считают непрактичным. Поэтому испытания проводят с каждым ультразвуковым преобразователем, но лишь для двух режимов, один из которых обеспечивает полное изображение тест-объектов, а другой - наивысшее разрешение какой-либо выбранной мишени. С целью обеспечить наилучшее разрешение всех видимых мишеней фокусировку ультразвукового пучка следует установить как можно в более широком диапазоне.
Для проведения описанных ниже процедур используют тест-объект со структурой нитевидных мишеней, показанной на рисунке А.1 (приложение А).
6.3.2 Установка параметров изображения (фокус, яркость, контрастность)
Фокусировка должна быть острой (четкой), а ручки регулировки яркости и контрастности должны быть установлены в самые нижние (левые) положения. Затем увеличивают яркость до тех пор, пока зона, свободная от эхосигналов на периферии дисплея, не станет слегка серой. Затем увеличивают контрастность, чтобы добиться наибольшего диапазона оттенков серого. Затем проверяют четкость фокусировки. При необходимости все эти процедуры повторяют еще раз.
6.3.3 Регулировка чувствительности (частота, подавление, выходная мощность, усиление, TGC, ATGC)
a) Записывают номинальную частоту ультразвукового преобразователя.
b) Если имеется возможность регулировки подавления или вырезания, то систему настраивают так, чтобы были видны наиболее слабые сигналы.
c) Выходную мощность и усиление устанавливают такими, чтобы нитевидные мишени изображались в виде точек наименьшего размера.
d) Компенсацию усиления по времени (TGC) устанавливают таким образом, чтобы изображения мишеней имели равную яркость. При сканировании в рабочей жидкости наклон TGC должен приближаться к нулю.
6.3.4 Заключительная оптимизация
Заключительная настройка изображения может быть проведена путем небольших изменений уровней подавления, усиления и выходной мощности.
Если в сканере предусмотрена автоматическая компенсация усиления по времени (АTGC), то и испытания следует проводить в этом режиме. Тест-объект рассматривают в режиме АTGC, а изображение настраивают с помощью некоторых органов ручного управления, например по общему усилению или выходной мощности.
6.3.5 Система регистрации
Цифровое формирование ультразвуковых изображений обеспечивает получение более объективных результатов измерений, а также их сохранение для последующего сравнения с более поздними измерениями. Главным преимуществом цифровой записи является то, что сохраненные изображения не подвержены деградации, характерной для фотографий или видеозаписей.
6.4 Измеряемые параметры
6.4.1 Общие положения
Описанные в настоящем стандарте методики применимы для измерений:
- длины прямых линий;
- длины кривых линий;
- окружностей;
- площадей;
- объемов;
- искажений изображения и регистрации;
- калибровки М-режима.
Интенсивность излучения должна быть низкой настолько, чтобы не вызвать искажения формы импульса из-за нелинейности распространения (см. МЭК 61102). В таблице следует указывать перечень всех факторов, влияющих на работу сканера, таких, например, как преобразователь, частота, установленная чувствительность, фокусировка, метод обработки изображения. Эти данные совместно с результатами измерений должны быть записаны достаточно подробно, чтобы позднее мог повторить измерения другой оператор.
6.4.2 Точность измерений (прямых и кривых линий, окружности, площади)
Для оценки точности измерительной системы сканера изображения проволочек или нитей тест-объектов, показанных на рисунке А.1 или А.2 (приложение А), настраивают с помощью регулировки чувствительности так, чтобы изображенные эхосигналы от них были как можно тоньше. Если тест-объект герметизирован, то необходимо применять средство для акустического контакта. Получают ультразвуковое изображение и оцифровывают положения нитевидных мишеней, находящихся в средней части рабочей зоны используемого преобразователя. Записывают также другие факторы, которые могут повлиять на разрешающую способность, например режим обработки изображения и данные по фокусировке. Эти же операции повторяют и с другими ультразвуковыми преобразователями из комплекта сканера.
Измерения выполняют по прямым линиям на экране в пределах примерно до 75% полного размера изображения. Используя программы обработки изображения, для каждого размера получают линейный профиль яркости. Расстояние между объектами (изображениями проволочек) измеряют от пика до пика их профилей яркости. В случае "зашумления" результатов измерений вместо положений пиковых значений берут положения средних точек между точками, в которых яркость уменьшена на 3 дБ, но такой способ отсчета должен быть отмечен в материалах испытаний. Эти измерения выполняют, по крайней мере, вдоль одной вертикальной и одной горизонтальной линии на рисунках А.1 и А.2 (приложение А), а также, по возможности, вдоль направлений, близких к вертикали в обзорном поле. Для каждого значения длины в каждом направлении вычисляют и вносят в таблицу усредненную относительную погрешность в процентах. Операции повторяют со всеми имеющимися масштабами изображения.
С целью оценить точность измерения длины кривых линий и площади поперечного сечения обводят замкнутую фигуру, расположенную по центру обзорного поля, площадью около 0,75 его размера. Измеряют длину окружности и площадь, затем рассчитывают погрешность результатов этих измерений в процентах. Фигуру отслеживают от точки к точке, так чтобы получить многоугольник. Измеряют периметр и площадь многоугольника. Дополнительно следует измерить две маленькие площади (размерами 0,1 и 0,25 обзорного поля), расположенные в верхней и нижней частях изображения. Эти операции повторяют со всеми имеющимися масштабами изображения.
6.4.3 Показ и запись искажений изображения
Сканируют двухмерную решетку равномерно расположенных нитевидных мишеней тест-объекта, показанного на рисунке А.2 (приложение А), так, чтобы отражения от них были размещены по всему обзорному полю с одинаковой яркостью. Выбирают мишени, расположенные по горизонтали и вертикали от центра обзорного поля. По оцифрованному изображению измеряют расстояния от каждой из них до какой-либо опорной нитевидной мишени, расположенной приблизительно в центре обзорного поля. Определяют и вносят в таблицу значения погрешности в процентах.
Непосредственным исследованием видимого изображения структуры из нитей в целом проверяют, что любые искажения (например, нарушение ортогональности размеров) не превышают 3%.
6.4.4 Калибровка М-режима
6.4.4.1 Общие положения
Измерения в режиме М предусмотрены в большинстве сканеров, работающих в режиме реального времени. Частичная оценка характеристик сканера в этом режиме может быть проведена на тест-объектах, указанных в приложении А.
6.4.4.2 Пространственные измерения (по линии А-сканирования)
При сканировании в М-режиме ультразвуковым пучком, направленным на проволочки или нити в тест-объекте для оценки разрешающей способности, как это описано выше для В-режима, может быть определена и погрешность измерения.
Искажения изображения или его записи контролируют и регистрируют по решетке нитевидных мишеней в тест-объекте, как и в режиме В.
Точность калибровки временной оси проверяют направлением на ультразвуковой преобразователь тональных импульсов от внешнего импульсного генератора и преобразователя с точно известными интервалами, например длительностью импульса в 1 мс и интервалом 200 мс.
Проверку результатов измерений в М-режиме для систем с цифровым изображением следует проводить по дисплею. Погрешность не должна превышать 3%.
6.4.4.3 М-режим измерения толщины ткани
В этом режиме система (ультразвуковой сканер) позволяет измерять изменения относительной толщины движущегося органа. Для оценки точности этих измерений требуется тканеэквивалентный фантом, который может сжиматься и возвращаться в прежнее состояние и в котором обеспечено сравнение изменения этой толщины с показаниями сканера в режиме М. Должна быть также предусмотрена различная степень сжатия этого фантома. Для этих измерений допускается использовать деформируемую губку. Однако важно иметь возможность проведения измерений этого режима на различных глубинах, т.е. тест-объект должен обеспечивать изменение расстояний между мишенью и преобразователем. Измерения следует повторять на каждой скорости пульсации мишени в М-режиме.
7 Методы калибровки трехмерных измерительных систем
7.1 Общие положения
Некоторые системы трехмерной (3D) визуализации используют только для получения объемного изображения, тогда как другие обладают и измерительными возможностями. Так как трехмерное восстановление объемов реализуют различными способами, важно исследовать метод восстановления объема и связанные с этим проблемы, а также оценить точность восстановленных изображений. В настоящем стандарте рассмотрена только оценка точности размеров восстановленного изображения. Измерения разрешающей способности трехмерных систем рассмотрены в МЭК 61391-2.
7.2 Методы получения трехмерных изображений
7.2.1 Общие положения
Для получения правильного трехмерного изображения требуется, чтобы система визуализации собирала данные в трехмерную матрицу вокселов. Эту матрицу, как правило, составляют по данным ряда плоскостей ультразвукового сканирования объема мишени. Система трехмерной визуализации сохраняет эту информацию в виде трехмерной матрицы. Пространственная плотность данных в ней зависит от числа линий ультразвукового сканирования в каждой из плоскостей ультразвукового сканирования, длительности импульсов, от числа плоскостей ультразвукового сканирования в оцениваемом объеме и расстояний между этими плоскостями. Важен способ сканирования интересующего объема, так как точность восстановления будет зависеть от того, насколько точно соблюдены расстояния между плоскостями сканирования. Расстояния между следующими друг за другом плоскостями сканирования должны быть одинаковыми, но они должны быть меньше разрешающей способности по толщине (слоя) ультразвукового преобразователя. Если это недостижимо, то необходимо интерполировать результаты сканирования в смежных плоскостях. Такая интерполяция может привести к погрешности реконструируемых объемов.
Когда составлена трехмерная матрица, из нее могут быть получены размеры по любому направлению в объеме. Например, если для формирования трехмерного объема собраны данные множества изображений в -плоскостях ультразвукового сканирования, то результирующая трехмерная матрица может быть "рассечена" перпендикулярно к оси
в плоскости
, образуя тем самым сечения С-сканирования. Полученное трехмерное изображение может быть повернуто в пространстве, а также может быть рассмотрено и измерено с различных углов зрения, которые не соответствуют первоначальным плоскостям ультразвукового сканирования.
Обзор методик трехмерного сканирования см. в [11], [12].
Получение и реконструкция объемной трехмерной матрицы могут быть реализованы двумя основными способами:
a) внешним перемещением датчика;
b) последовательной реконструкцией.
Каждый из способов имеет свои особенности, преимущества и недостатки.
7.2.2 Способы получения трехмерного объема
7.2.2.1 Методы внешнего позиционирования
Методы реконструкции трехмерного объема при внешнем перемещении датчика используют координатную опорную рамку и опорную точку, и все размеры и положения в трехмерной матрице объема записывают относительно этих опорных координат. В системах такого типа обычно имеется рамка сканирования, включающая в себя сканируемый объем, по направляющим которой перемещается с постоянной скоростью (от двигателя) датчик. Может быть применен и другой тип - в виде жесткого держателя или внешнего устройства сканирования, - обеспечивающий точную координатную привязку датчика. Этот способ более точен и технологичен, но связан с проблемами первоначальной привязки держателя датчика, девиациями скорости двигателя и нестабильностью системы позиционирования во время сбора данных. Существует также способ перемещения датчика вручную, при котором его положение и ориентация определяются опорной координатной системой.
7.2.2.2 Методы последовательного позиционирования
Методы последовательного позиционирования и реконструкции реализуют по-разному, но они, как правило, основаны на добавлении каждой последующей плоскости сканирования к предыдущей плоскости в трехмерной матрице. В одном из таких методов используют скорость (частоту) смены пятна изображения, по крайней мере, в одном измерении (направлении) [14], [15]. Такое кодирование содержит ряд допущений, не всегда верных. Одно из допущений состоит в том, что перемещение принимают только линейным или только угловым. В некоторых коммерчески доступных реализациях осуществляют простое равномерное возвратно-поступательное перемещение. Поэтому важно показать возможности и ограничения таких измерений в лабораторных условиях. Проблемы возникают в тех случаях, когда скорость перемещения преобразователя не постоянна, или когда он меняет свое направление относительно первоначального. В большинстве случаев схема реконструкции не может компенсировать эти сдвиги относительно ориентации опорной плоскости, и полученное объемное изображение будет неточным.
7.3 Контролируемые параметры, связанные с проблемами реконструкции
7.3.1 Реконструкция при использовании внешнего перемещения
Для испытаний такой системы допускается использовать как заполненные водой, так и тканеимитирующие тест-объекты.
Параметры испытаний: По полученному объемному изображению измеряют расстояния по трем декартовым координатам и сравнивают их с размерами физического объекта вдоль тех же самых координат. Проверяют ориентацию ультразвукового преобразователя относительно опорной рамки и точки; скорость двигателя (перемещения); расстояние между плоскостями ультразвукового сканирования; размеры полученного объемного изображения в декартовых координатах. Ниже изложена процедура измерения следующих параметров:
a) линейных размеров;
b) площади;
c) периметров площадей;
d) объемов.
7.3.2 Системы реконструкции по последовательным плоскостям
Для оценки точности систем, в которых трехмерное пространственное кодирование базируется на спеклах изображения, необходимо использовать тест-объект с относительно однородным расположением центров и структур обратного рассеяния. Для современных ультразвуковых систем необходимо оценивать не только точность измерений на больших расстояниях, но и равномерность шкалы расстояний. Из-за неточности определения положения многие из этих систем требуют проведения дополнительных испытаний. При наличии такой неточности изображение может быть искажено из-за отставания или скачков при записи данных в направлении сканирования.
Контролируемые параметры: По полученному объемному изображению измеряют расстояния по трем декартовым координатам и сравнивают их с размерами физического объекта вдоль тех же самых координат. Ниже рассмотрены измерения следующих параметров:
a) линейных размеров (по осям);
b) площадей;
c) периметров площадей;
d) объемов.
7.3.3 Испытательное оборудование (фантомы) для оценки точности трехмерной реконструкции
7.3.3.1 Нитевидный фантом (заполненный водой)
При реконструкции методом внешнего перемещения датчика может быть использован описанный в приложении А и показанный на рисунке А.1 или А.2 (приложение А) заполненный рабочей жидкостью нитевидный тест-объект. Так как эта система не зависит от корреляции спеклов с местом размещения плоскостей ультразвукового сканирования в трехмерной матрице, то структура из нитей вполне пригодна для проверки точности реконструкции. Для каждого из рядов нитей по их изображениям измеряют расстояния изображения нити до опорной нити и строят зависимость этих значений от реальных расстояний
в фантоме. Определяют максимальное и среднеквадратичное отклонения измеренных положений нити от соответствующих регрессий линий
относительно
и углы их наклона.
Если реализуемый в испытуемой системе алгоритм измерения объема может работать при острых углах и плоских поверхностях, то точность измерений объемов простых фигур лучше всего проверять на нитевидном тест-объекте, показанном на рисунке А.1 или А.2 (приложение А).
7.3.3.2 Фантом с тканеимитирующим материалом
Тест-объекты второго типа, которые могут быть применены при испытаниях систем обоих типов, приведены в приложении В. На рисунках В.1-В.4 (приложение В) показаны различные виды структур яйцеобразной формы из тканеимитирующего материала с малыми центрами рассеивания, распределенными в матрице из тканеимитирующего материала. Это объемный тест-объект, мишени в котором определяют по разнице в контрастности рассеивателей. Границы определяют лишь серой шкалой и средним уровнем сигнала. Такой объемный рассеиватель позволяет лучше, чем зеркальные отражатели или точечные мишени, оценить формирование изображения и измерительные возможности ультразвуковых систем реконструкции объемных мишеней, исследуемых в теле пациента.
7.4 Методы оценки точности реконструкции трехмерного изображения
7.4.1 Общие положения
Эти методы применимы для трехмерных измерений с помощью как двухмерных, так и трехмерных сканеров. Для трехмерного изображения высокого качества и его контроля расстояние между записанными (в память) плоскостями визуализации должно быть меньше ширины плоскости ультразвукового сканирования по толщине в их фокусе, а в идеале - меньше половины фокальной ширины (в направлении толщины). Если расстояние между плоскостями сканирования регулируемое, то такую возможность следует использовать.
7.4.2 Точность и методы измерений при применении нитевидного тест-объекта
Измерения объемов по двум ортогональным двухмерным изображениям: Трехмерные измерения часто выполняют с помощью простых систем двухмерного изображения при визуализации приблизительно сферического объекта, измеряя три главные оси этого объекта и рассчитывая сферический или эллипсоидальный объем по соответствующим уравнениям или по имеющейся в сканере программе. Методика расчета объема может быть проверена по одному из изображений, как это описано в предыдущих подразделах для измерения диаметров приблизительно сферических объектов, образуемых четырьмя или более нитями в фантоме, и последующим повторением этих измерений по тому же самому или смежному изображению в предположении, что два из них были повернуты друг относительно друга на 90°. Затем вычисляют объем сферы с поперечным сечением, равным измеренному кругу, и, сравнивая результаты расчета с объемом аппроксимирующей сферы, определяют погрешность.
Испытания для введения поправок на наклон плоскости сканирования в боковом направлении и для проверки алгоритма трехмерных измерений при смещении, параллельном нитям: Проводят трехмерное сканирование с центральными плоскостями сканирования, перпендикулярными к нитям, и с направлением сканирования, параллельным нитям, т.е. с датчиком в положении В на рисунке А.1 (приложение А). Если система обеспечивает поворот датчика по дуге в боковом направлении, то этот поворот используют при сканировании и, если возможно, выводят на экран реконструированный объем со всеми реконструированными изображениями, перпендикулярными к нитям. Если такое переформатирование не обеспечивается секторным сканером, то вносят поправки в значения расстояний между нитями по известному углу обзора. Если процедуры, предусмотренные в 6.4.2, еще не проведены, то выполняют измерения в соответствии с 6.4.2 по первому, среднему и последнему изображениям из трехмерного набора, фиксируя при этом погрешности и отклонения. Отношения средних значений расстояний между нитями к их действительным значениям в горизонтальном и вертикальном направлениях считают калибровочными размерными коэффициентами в поперечном и продольном
направлениях соответственно. Проверяют соответствие средних расстояний между нитями в группах мишеней с расстояниями между ними в отдельных изображениях, которое должно быть соблюдено в пределах 1%. См. [16].
При калибровке расстояния между плоскостями ультразвукового сканирования в трехмерной визуализации и при оценке искажений реконструированных изображений в направлении, совпадающем с толщиной плоскости ультразвукового сканирования, датчик медленно передвигают или поворачивают в боковом направлении (т.е. в направлении, совпадающем с толщиной плоскости ультразвукового сканирования), т.е. слева направо [датчик в положении А на рисунке А.1 (приложение А)]. Это движение выполняют в соответствии с направлениями трехмерного сканирования, предусмотренными в ультразвуковой системе изготовителем. Как правило, рекомендуется только линейное перемещение или секторное качание, но иногда, для оценки возрастания погрешности, полезно отклониться от этих рекомендаций.
Для каждого из рядов нитей при этом втором сканировании на мониторе будут реконструированы изображения, перпендикулярные к нитям. Вычисляют и вносят в протокол максимальное и среднеквадратичное отклонения:
a) значений измеренных расстояний между нитями от их действительных значений;
b) значений измеренных положений нити относительно прямой линии;
c) наклона полученных прямых линий относительно ожидаемых значений.
С целью оценить точность измерения кривых линий и площадей поперечного сечения очерчивают замкнутые фигуры по центру экрана так, чтобы они занимали около 0,75 обзорного поля. Измеряют их поперечные размеры, периметр и площадь, вычисляют разницу (в процентах) от соответствующих известных величин. По данным, полученным при перемещении датчика в направлении, перпендикулярном к нитям, вычисляют объем. Отмечают известную площадь в реконструированном изображении, перпендикулярном к нитям. Отмечают длину
, измеренную сканером вдоль нитей, в качестве третьего размера для трехмерного объема, ограниченного нитями. Для рисунка А.1 (приложение А) этот объем будет представлен в виде цилиндра. Сравнивают значение измеренного объема
с известным значением
![]() , где
, где - определенный выше калибровочный размерный коэффициент. Другие примеры измерений с помощью нитевидных тест-объектов рассмотрены в [16].
7.4.3 Точность измерений при использовании объемных мишеней в фантоме с рассеивателями (рисунок В.1 в приложении В) системами двухмерного сканирования
7.4.3.1 Общие положения
При этих измерениях датчик поворачивают или наклоняют для нахождения круглого поперечного сечения каждой из мишеней в трехмерном изображении, которое может быть полностью видимым в одном обзорном поле. Для каждой мишени плоскость изображения перемещают и юстируют так, чтобы найти малую ось и наибольший диаметр, пока объект еще представлен круглым. Маркеры электронного калипера устанавливают на концы наибольшего вертикального (осевого) диаметра в этом круглом поперечном сечении, и его значение отсчитывают по показаниям калипера. Подобным же образом измеряют горизонтальный (поперечный) диаметр
. Среднее значение из этих двух диаметров обозначают как
.
Поворачивают датчик на 90°, находят и измеряют наибольший размер эллипсоида, обозначаемый как , где
- сумма длин каждой из половин "яйца"
![]() . По возможности повторяют эти процедуры и для более малых трехмерных объектов. Полученные результаты сводят в таблицу 2. Полученные при измерениях значения сравнивают с действительными значениями диаметров, приведенными в таблице 1.
. По возможности повторяют эти процедуры и для более малых трехмерных объектов. Полученные результаты сводят в таблицу 2. Полученные при измерениях значения сравнивают с действительными значениями диаметров, приведенными в таблице 1.
Таблица 1 - Предполагаемые значения для двух эллипсоидальных объектов, изображенных на рисунке В.3 (приложение В)
Объект | Половина периметра*, см | Периметр, см | Площадь, см | Площадь поверхности, см | Объем, см | |
Объект малого размера | ||||||
Длинная половина | 3,01 | 6,02 | 3,82 | 14,51 | 4,58 | |
Короткая половина | 1,65 | 3,31 | 1,70 | 9,94 | 2,04 | |
В целом | 4,66 | 5,65 | 2,54 | 24,45 | 6,61 | |
Сечение | 2,83 | 5,65 | 2,54 | |||
Объект большого размера | ||||||
Длинная половина | 5,35 | 10,7 | 16,5 | 63,6 | 55,0 | |
Короткая половина | 4,16 | 8,3 | 11,0 | 69,9 | 36,6 | |
В целом | 9,5 | 19,0 | 27,5 | 133,6 | 91,6 | |
Сечение | 7,9 | 15,7 | 19,6 | |||
* Измерения половины периметра проводят при определении длины кривых линий. | ||||||
Примечание - Периметры и половины периметров здесь рассчитаны по более точным интегральным выражениям, чем в выражении 1. | ||||||
Таблица 2 - Предлагаемая таблица для протокола с данными измерений
Объект | Половина периметра | Периметр | Площадь | Площадь поверхности | Объем | |||||
см | % | см | % | см | % | см | % | см | % | |
Объект малого размера | ||||||||||
Длинная половина | ||||||||||
Короткая половина | ||||||||||
В целом | ||||||||||
Сечение | ||||||||||
Объект большого размера | ||||||||||
Длинная половина | ||||||||||
Короткая половина | ||||||||||
В целом | ||||||||||
Сечение | ||||||||||
Результаты измерений вносят в протокол в виде процентов ожидаемых значений, взятых из таблицы 1. Настоящую форму следует заполнять для каждого из исследуемых алгоритмов измерений. Вся или часть настоящей таблицы предназначена для внесения результатов вычислений с использованием выражений 1, 2 и 3, а также результатов других измерений, выполняемых сканером. Подобные измерения выполняют при биометрии трехмерного изображения плода. Эта же таблица может быть использована для измерений кривых линий, площади и объема по нитевидным тест-объектам. | ||||||||||
7.4.3.2 Периметры
Измерения начинают с определенной точки периметра на изображении поперечного сечения яйцеобразной мишени. Маркерами калипера обводят все изображение трехмерной мишени, пока не будет достигнута начальная точка. В среднем расстояние между маркерами калипера не должно превышать 1/20 оцениваемой длины периметра, если это не эллипс или какая-то кривая линия, обработка параметров которой предусмотрена в ультразвуковой системе. Допускается принять следующее выражение для периметра каждой из двух половин эллипса [17]:
 , (1)
, (1)
где - главные полуоси (
или
) для данной половины эллипсоида;
- среднее значение малой оси эллипсоида.
Периметр всего объекта яйцеобразной формы равен сумме периметров двух половин. Периметр круглого сечения равен . Ожидаемые значения для двух объектов, показанных на рисунках В.1 и В.2 (приложение В), представлены в таблице 1.
7.4.3.3 Площади
Практически во всех сканерах площадь, ограниченную некоей линией, вычисляют по результатам измерений периметра, см. 7.4.3.2.
Результаты измерений площадей следует сравнить с известными данными о площадях поперечного сечения трехмерного объекта. Площади наибольшего эллиптического и круглого сечений будут соответственно равны [17]:
![]() * и
* и ![]() .
.
_______________
* Формула соответствует оригиналу. - .
Площадь поверхности эллипсоида выражают как:
![]() , (2)
, (2)
где - эксцентриситет
![]() ;
;
- эксцентриситет
![]() .
.
См. таблицу 1 ожидаемых значений для двух объектов, показанных на рисунке В.1 (приложение В).
7.4.3.4 Объемы
Объемы объектов соответствующих форм могут быть вычислены по результатам измерений максимальных линейных размеров по трем ортогональным осям. Объем трехмерных эллипсоидальных объектов выражают как [17]:
![]() . (3)
. (3)
Объем также определяют, если измерены две длины - и
, где
![]() . Возможно и усреднение результатов измерений
. Возможно и усреднение результатов измерений в двух перпендикулярных направлениях. Эти измерения могут быть выполнены по двум плоскостям изображения, если повернуть датчик на 90°. При этом вычисления будут верными только для объемов, представляемых двумя половинами эллипсоидов круглого поперечного сечения. (При оценке объема какого-либо тела в виде эллипсоида с ортогональными осями
,
и
выражение (3) может быть преобразовано в
![]() ). См. таблицу 1 ожидаемых значений для двух объектов, показанных на рисунке В.3 (приложение В).
). См. таблицу 1 ожидаемых значений для двух объектов, показанных на рисунке В.3 (приложение В).
Для измерения объектов других форм и повышения точности получают серии изображений от равномерно отстоящих друг от друга плоскостей ультразвукового сканирования. Для повышения точности расстояние между этими плоскостями должно быть меньше толщины плоскости ультразвукового сканирования в фокусе, в идеале - меньше половины ширины фокальной области. В элементарных расчетах измеряемый объем разделяют на множество цилиндров с основанием, равным измеряемой площади в плоскости ультразвукового сканирования, и с высотой, равной расстоянию между этими плоскостями; таким образом, площадь поперечного сечения трехмерного объекта (цилиндра) в каждой плоскости умножают на расстояние между плоскостями сканирования и эти объемы в каждом слое суммируют. Такие вычисления не рекомендуется проводить вручную. Поэтому в системы трехмерной визуализации вводят более сложные алгоритмы измерения объемов, и такие алгоритмы необходимо проверять.
8 Измерение функций размывания точки и линии (для мишеней высокой контрастности)
8.1 Общие положения
Разрешающая способность большинства систем визуализации может быть оценена посредством измерения функции размывания точки (PSF) или функции размывания линии (LSF) как отклика системы визуализации на точечную или линейную мишень высокой контрастности. Для большинства оптических систем PSF однозначна, симметрична и изотропна. Поэтому ее измерения важны для описания отклика системы на воздействие импульса.
В отличие от оптических систем визуализации PSF и LSF в ультразвуковых системах не однозначны и не изотропны. Кроме того, ультразвуковые PSF и LSF не симметричны и имеют различные размеры в продольном и поперечном направлениях, которые еще и изменяются с расстоянием вдоль оси ультразвукового пучка (т.е. с глубиной изображения). Поэтому для получения представительных результатов оценки качества визуализации на определенных глубинах необходимо провести множество различных измерений PSF и LSF для различных положений и значений глубины.
Собственно PSF или LSF не может быть использована в качестве характеристики отклика системы на воздействие импульса. Из-за изменения с глубиной PSF и LSF будут иметь различные уровни разрешающей способности, зависящие от положения в обзорном поле.
Сложности возникают также из-за взаимодействия ультразвука с мишенями высокой контрастности по сравнению с низкоконтрастными. При высоком контрасте с помощью ультразвука могут быть получены изображения очень малых структур, таких, например, как тонкие проволочные нити или острие иглы, или микропузырьки воздуха. Каждая из них будет давать характерное по размытости пятно, определяемое PSF или LSF. Для мишеней с низкой контрастностью, таких как мягкая ткань (человеческого организма), ультразвук не дает изображений отдельных точечных мишеней, а формирует серую спекл-структуру, проявляемую как зернистая основа, характеристики которой связаны с когерентностью ультразвукового пучка. Результаты измерений размеров PSF ультразвуковой системы на какой-либо заданной глубине характеризуют ее разрешающую способность к мишеням высокой контрастности. Для измерения разрешающей способности к мишеням низкой контрастности применяют тканеимитирующий тест-объект, по которому иногда измеряют и характеристики выделения объектов по контрасту. В настоящем стандарте рассмотрены методы измерения PSF и LSF только для контрастных мишеней. Измерения мишеней низкой контрастности рассмотрены в МЭК 61391-2.
В настоящем стандарте PSF и LSF измеряют на двух уровнях: при уровне снижения сигнала, равном минус 6 дБ от максимума, обозначаемом часто как FWHM (full width at half maximum - полная ширина на половине максимума), и при уровне снижения, равном минус 20 дБ.
Примечание - Разрешающая способность системы (в продольном, поперечном или перпендикулярном направлении) тест-объектов с парными мишенями может быть аппроксимирована функцией PSF или LSF, зависящей также от расстояния между мишенями, что снижает уровни комбинированных таким образом кривых на 6 дБ. Для более точного представления отклика системы на парную мишень необходимо суммировать радиочастотные сигналы от каждой мишени.
8.2 Методы испытаний
Для проведения испытаний требуется следующее:
a) тест-объекты, рассмотренные в приложениях А и С, с мишенями, расположенными в точно обусловленных местах;
b) резервуар с дегазированной жидкостью;
c) цифровые изображения, рассмотренные в 6.2.2 и 6.3.5.
Технические характеристики этих устройств приведены в приложениях А и С.
8.3 Приборы
8.3.1 Общие положения
Указанные ниже приборы выбраны так, чтобы провести испытания сканеров в режиме реального времени без использования каких-либо электрических сигналов на их входе или выходе.
8.3.2 Тест-объект и резервуар
Тест-объект должен иметь мишенную структуру, обеспечивающую измерение следующих характеристик системы (сканера):
a) осевой разрешающей способности;
b) поперечной разрешающей способности;
c) толщины плоскости сканирования.
Примеры таких тест-объектов приведены в приложениях А и С.
Необходим резервуар с дегазированной рабочей жидкостью. При допустимости отклонения значения скорости звука от стандартного значения (см. раздел 5) рабочую жидкость заменяют водой, что упрощает обслуживание установки.
8.3.3 Цифровой преобразователь изображения
Необходим цифровой преобразователь изображения, требования к которому изложены в 6.2.2.
8.4 Режимы работы аппаратуры при испытаниях
8.4.1 Общие положения
Комбинаций режимов работы сканера и используемых с ним преобразователей так много, что это исключает проведение испытаний для всех из них. Поэтому испытания проводят на каждом преобразователе лишь при определенных установках сканера. Сканер регулируют в соответствии с описанными ниже процедурами. С целью обеспечить наилучшее разрешение для всех видимых мишеней фокусировка ультразвукового пучка должна быть установлена на возможно больший диапазон глубин.
8.4.2 Регулировка изображения (фокус, яркость, контрастность)
Фокусировка должна обеспечить самое четкое изображение, а ручки контрастности и яркости устанавливают в самое нижнее (левое) положение. Затем яркость увеличивают до тех пор, пока зона, свободная от эхосигналов на периферии обзорного поля, не станет слегка серой. Затем увеличивают контрастность, чтобы изображение содержало максимальный диапазон оттенков серого. Затем вновь проверяют остроту фокусировки; при необходимости всю процедуру повторяют вновь. Если система работает в нескольких зонах фокусировки, то активируют все из них для желаемого диапазона измерений.
8.4.3 Регулировка чувствительности (частота, подавление, выходная мощность, усиление, TGC, ATGC)
a) Записывают номинальную частоту преобразователя сканера.
b) Если возможны регулировки подавления или вырезания, то систему настраивают так, чтобы были видны наиболее слабые сигналы.
c) Выходную мощность и усиление устанавливают на минимальные значения, еще обеспечивающие адекватное изображение.
d) АТGC должна быть выключена.
e) Общее усиление следует увеличить до тех пор, пока сигнал от мишени не станет четко видимым.
8.4.4 Система регистрации
Следует использовать оцифрованные изображения, как это описано в 6.2.2 и 6.3.5.
8.4.5 Калибровка отклика системы
Общепринят метод калибровки отклика системы (зависимости выходного сигнала от акустического давления на датчике) при использовании плоских тел, градуированных по отражательной способности [19], [20]. Простой калибровочный тест-объект содержит зеркальные отражатели, расположенные параллельно друг другу и перпендикулярно к ультразвуковому пучку на различных расстояниях от датчика в тканеимитирующем материале. Для каждого значения расстояния необходимы, по крайней мере, два отражателя с различной отражательной способностью.
В наипростейшем случае коэффициент отражения одной из пластин должен быть на 10 дБ ниже, чем у другой, что реализуют, изготовив одну пластину из нержавеющей стали, а другую - из оргстекла. Стальные пластины устанавливают по одной на ступенях одной лесенки (А), а пластины из оргстекла - на другой, расположенной рядом (В). Для частот, используемых в ультразвуковой диагностике, первая ступень должна быть ниже поверхности воды на 1 см, а вторая и третья - на 2 и 5 см соответственно. Затем располагают еще две ступени на глубине 10 и 18 см. Пространство над ступенями должно быть заполнено тканеимитирующим материалом. Скорость звука , плотность
и наклон зависимости коэффициента затухания
(
- коэффициент затухания на рабочей частоте
) этого материала должны быть следующими:
(1540±6) м/с;
(1,05±0,05) г/см
;
![]() (0,5±0,05) дБ·см
(0,5±0,05) дБ·см·МГц
.
Эхосигналы от рассеивателей в тканеимитирующем материале должны быть, по крайней мере, на 20 дБ слабее эхосигнала от самого слабого отражателя на всех частотах, характерных для волновой формы сигнала испытуемого датчика.
Если при калибровке системы применяют регулировку чувствительности, усиления или выходной мощности, то такой тест-объект может быть просмотрен в фокальной зоне датчика и за ней, а при усилении, настроенном на прием слабых сигналов при соотношении сигнал/шум около 6 дБ, будут видны и отражатели на лесенке В. При слишком высоких уровнях сигнала выбирают отражатели на более глубоко расположенных ступенях и уменьшают TGC, насколько это возможно. Записывают уровни сигнала (через 10 дБ) от отражателей на ступенях лесенок А и В. Затем увеличивают чувствительность системы настолько, чтобы сигнал от отражателя на ступени лесенки В (т.е. от пластины В) был равен по уровню сигналу на ступени лесенки А (т.е. от пластины А) при предыдущем уровне чувствительности. Затем устанавливают сигнал от пластины А на 10 дБ выше, чем сигнал от пластины В при первоначальном значении чувствительности. При повторении этого процесса может быть калиброван весь динамический диапазон сигнала с интервалами в 10 дБ. Если при этом будут записаны установленные параметры чувствительности системы, то будет калибрована и система. Интерполяция установленных значений чувствительности позволяет калибровать изменения сигнала в меньших интервалах.
Применение других тест-объектов позволяет получить слабые отраженные сигналы, лежащие в диапазоне линейности большинства приборов ультразвуковой диагностики. Отражательная способность мишеней в них точно не известна, и поэтому результаты, полученные с такими тест-объектами, необходимо сравнивать с результатами калибровки изложенным выше первичным методом. Один из таких вторичных методов заключается в создании ступеней на одной лесенке из полиэтилена высокой плотности, а на другой - из полиэтилена низкой плотности. Импеданс материала высокой плотности составляет 2,33х10 кг·м
·с
, а материала низкой плотности - 1,79х10
кг·м
·с
[21]. Коэффициенты отражений от этих материалов в тканеимитирующем материале должны отличаться на 10 дБ. Для получения более слабых эхосигналов и более тонкой их градации могут быть использованы лесенки со ступенями, имеющими другие коэффициенты отражения [22]. Однако такие тест-объекты следует калибровать по тест-объекту с мишенями известной отражательной способности. Из-за низкой отражательной способности таких конструкций становится критичной температура среды, которую необходимо контролировать достаточно точно, чтобы температурные изменения отражательной способности не превышали ±0,5 дБ.
Более приемлем, когда это возможно, метод подачи на испытуемый датчик электрического сигнала непосредственно или с помощью дополнительного калиброванного преобразователя [23]. Однако соединители для непосредственного ввода сигналов дорогостоящи и подходят не ко всем системам, а использование акустических сигналов связано с тщательностью реализации акустического взаимодействия. Тем не менее, в комбинации с опорным (первичным) методом этот метод может быть применен на практике.
Точечные мишени для измерений PSF: Этот метод основан на применении мишеней различных размеров и также должен быть проверен по изложенному выше первичному методу. Поскольку сечение обратного рассеяния мишеней увеличивается с частотой, этот тип мишеней имеет особое значение для высокочастотной части акустического сигнала сканирования. Однако из-за появления сигналов от малых рассеивателей возможность использования этого метода для испытаний сканеров нереальна.
Согласно теоретическим данным, мишени с размерами, существенно меньшими длины волны, имеют одинаковую частотную зависимость отражательной способности независимо от их диаметра. Поэтому рекомендуется подготовить ряд отражателей с известными отношениями их обратного рассеяния. Ряд сфер с диаметрами, увеличивающимися последовательно на 26%, таких, например, как 10 мкм, 12,6 мкм, 15,87 мкм, 20 мкм, 25,2 мкм, 31,75 мкм, 40 мкм, 50,4 мкм, 63,5 мкм и 80 мкм, будут определять возрастание отражений с шагом 6 дБ в диапазоне 54 дБ. Этот метод был реализован в виде плотного распределения малых рассеивающих частиц, однако он имеет определенные ограничения из-за невозможности точно знать размеры каждой частицы.
Подобным образом могут быть получены калиброванные значения отраженных сигналов от ряда проволочек с плоским торцом. Для получения ряда сигналов с шагом 6 дБ необходимо, чтобы отношения диаметров проволочек были равны 2=1,41. На частоте 5 МГц ряд таких проволочек с диаметрами от 200 до 1600 мкм может охватить диапазон 36 дБ с точностью приблизительно 1 дБ.
8.5 Контролируемые параметры
8.5.1 Общие положения
Для измерения функции размывания точки или линии соответствующую мишень сканируют в резервуаре. Стандартная точечная мишень - это плоский торец проволоки, а стандартная линейная мишень - это нить или проволока, перпендикулярная к направлению распространения ультразвука. Для детальной оценки качества визуализации системы, проводимой при ее разработке, производстве или в исследовательских целях, значение функции размывания точки PSF определяют в каждом из трех направлений. Функции размывания линии LSF применяют для установления требований к ультразвуковому полю. LSF рекомендуется оценивать по разрешающей способности при измерениях на множестве мишеней, расположенных в пределах всего обзорного поля, при различных установках системы на фокус и частоту. При визуальных измерениях и в системах с обработкой нелинейных сигналов предпочитают измерять осевое разрешение на паре мишеней. Измерения PSF и LSF по линии, перпендикулярной к оси ультразвукового пучка и проходящей через нее, непосредственно касаются разрешающей способности систем визуализации по мишеням высокой контрастности, если эти измерения проводят в направлении той же линии и на той же глубине в фантоме. PSF, LSF и разрешающую способность допускается вычислить по результатам других измерений, если соответствующие характеристики системы калиброваны. Наряду с термином "функция размывания" рекомендуется пользоваться термином "размер пятна", определенным в настоящем стандарте в виде ширины PSF и LSF.
Измерения PSF и LSF в настоящее время являются относительными. Допускается получить количественные результаты, характеризующие чувствительность системы визуализации к специально обусловленной или стандартной точечной мишени или к источнику точечного давления [24]-[28], однако из-за ограниченности экспериментальных исследований такая методика еще не может быть стандартизована. Эти измерения непосредственно связаны с осевой разрешающей способностью высококонтрастных мишеней и с осевой LSF систем визуализации на определенном расстоянии вдоль пучка (т.е. по глубине фантома).
В процессе всех этих измерений необходимо юстировать чувствительность сканера и наклон датчика таким образом, чтобы добиться максимального сигнала от мишени.
При использовании линейной мишени, ориентированной перпендикулярно к плоскости ультразвукового сканирования, поперечное сечение линии этой плоскостью представляет собой функцию поперечного размывания линии, но такая конфигурация имеет два ограничения:
a) функция размывания линии может быть измерена только в плоскости ультразвукового сканирования;
b) интенсивность сигнала зависит от ориентации ультразвукового пучка, который должен быть перпендикулярен к линейной мишени.
С целью преодолеть это ограничение иногда применяют сферическую мишень. Однако интерференционные эффекты внутри сферы приводят к искажениям направленности рассеяния, если сфера не представляет собой очень маленький и слабый отражатель [24].
В качестве альтернативного тест-объекта для измерения разрешающей способности используют одиночную нить (или проволоку), установленную вертикально (в направлении распространения ультразвукового пучка) на устройстве микроперемещений, позволяющем нити двигаться в обзорном поле [рисунок С.3 (приложение С)]. Это обеспечивает измерение размера пятна в любой точке обзорного поля и устраняет также проблемы, присущие решетке мишеней, выравнивания всех нитей перпендикулярно к пучку при одинаковом времени записи максимального сигнала от каждой.
Если точечная мишень намного меньше длины волны (или диаметра ультразвукового пучка в месте нахождения мишени при измерениях датчиков с большой апертурой), то измеряемая функция размывания точки не зависит от характеристик мишени. Отмечено, что ширина отклика от PSF (от точечной мишени) и от LSF (от линейной мишени) приблизительно одинакова. Было установлено, что обратное рассеяние имеет плавную зависимость от угла и частоты, и предложен способ создания мишеней [25], две конструкции которых показаны на рисунке С.4 (приложение С).
Из теории рассеяния фронтальной плоскостью [25] следует, что поперечное сечение обратного рассеяния равно
![]() , (4)
, (4)
где - волновое число;
- радиус проволоки;
- удельный акустический импеданс материала проволоки;
- удельный акустический импеданс окружающей среды (воды).
Рассеяние пропорционально квадрату частоты и четвертой степени диаметра (до тех пор, пока диаметр мишени настолько мал, что позволяет пренебречь фазовыми различиями отражения от различных частей мишени). Для малых углов влияние угла между торцевой плоскостью и направлением пучка мало. При больших углах рассеяние уменьшается. Если выполнить мишень малой, то влияние угла уменьшится.
При наклонном падении ультразвука на передний торец проволочной мишени сила рассеяния уменьшается. Поэтому при испытаниях секторных датчиков следует переориентировать датчик или мишень, если необходимо сравнить количественные результаты измерений интенсивности отраженных сигналов в различных точках ультразвукового поля. При измерениях ширины пучка переориентация необязательна.
На рисунке С.4 (приложение С) показан эскиз двух точечных мишеней, изготовленных из проволоки, используемой дантистами (диаметр 0,24 мм). Левая мишень применима для импульсного ультразвукового излучения, для которого могут быть разделены во времени сигналы, отраженные от торца проволоки и от трубки-держателя. Такой держатель (трубка внешним диаметром 1 мм) обеспечивает механическую жесткость. Правую мишень используют при непрерывном ультразвуковом излучении. В ультразвуковой пучок помещают лишь конец проволоки, который и дает обратное рассеяние.
8.5.2 Осевые размеры PSF и LSF и разрешающая способность по оси
8.5.2.1 Общие положения
Размеры PSF и LSF в осевом направлении следует измерять на различных глубинах. Подходящий для измерения PSF тест-объект (фантом) показан на рисунках С.3 и С.4 (приложение С); второй из них применяют, чтобы исключить реверберацию из-за присутствия держателя проволоки в ультразвуковом пучке. LSF измеряют по тест-объектам, показанным на рисунках А.1-А.2 (приложение А) и рисунке С.1 (приложение С), а осевое разрешение - по тест-объекту, изображенному на рисунке С.2 (приложение С). Измерения допускается проводить с шагом, меньшим 1/3 осевой длины обзорного поля, по всему диапазону глубин, соответствующему испытуемому датчику. Должны быть выявлены и внесены в протокол источники изменчивости показаний, как это установлено в 6.4.2. Разрешающая способность по оси может быть получена в виде минимального расстояния: 1) между двумя нитями на рисунке С.2 (приложение С), пятна от которых еще различимы между собой; 2) между двумя нитями, снижение сигнала между которыми составляет не менее 6 дБ.
8.5.2.2 Процедура определения осевых размеров
Ориентируют преобразователь так, чтобы получить максимальный сигнал от мишени (мишеней). Особенно важно направить ультразвуковой пучок перпендикулярно к нити. Устанавливают чувствительность системы такой, чтобы были четко видны, но не насыщены все нитевидные мишени. Получают несколько изображений нитевидного фантома в В-режиме или в режиме объемного изображения и оцифровывают лучшее из них. Убеждаются, что ультразвуковой преобразователь надежно установлен на поверхности тест-объекта. Если преобразователь имеет криволинейную приемоизлучающую поверхность, то его центральная линия сканирования должна быть перпендикулярна к поверхности акустического окна тест-объекта, а ультразвуковые пучки должны быть перпендикулярны к нитям.
Для измерений PSF необходимо выполнить двухмерное (2D) сканирование точечной мишени в каждом обусловленном месте ее расположения после того, как будет завершена юстировка направления центральной оси или центральной плоскости пучка, или плоскости обзора. При измерениях PSF или LSF получают такое изображение тест-объекта, в котором видны нити по всему диапазону глубин, присущему испытуемому преобразователю. Используют программу обработки изображения, чтобы получить профиль по яркости вдоль вертикального направления для множества следующих друг за другом линий сканирования, перекрывающих изображаемую мишень при поперечном перемещении вертикальной линии отсчета слева направо до тех пор, пока амплитуда профиля изображения мишени не станет максимальной. Для каждой глубины расположения нитей, используя эту максимальную амплитуду, измеряют и вносят в протокол полную ширину пятна на половине от максимума (FWHM) и ширину на уровне минус 20 дБ. По изображению фантома измеряют размер пятен по оси для всех положений (по глубине) видимых мишеней. Получив все значения этой ширины, строят зависимость этой ширины на уровне FWHM или минус 20 дБ от глубины в изображении фантома. Эта зависимость иллюстрирует изменение осевых PSF или LSF с глубиной на изображении тест-объекта. Для большинства существующих систем осевая разрешающая способность от глубины будет испытывать лишь незначительные изменения.
Будет видна и длина профиля PSF или LSF при соответствующем уровне сигнала, близком к предполагаемому уровню помехи, если это позволяют артефакты, имеющиеся на изображении.
8.5.3 Поперечная ширина PSF и LSF и поперечная разрешающая способность
8.5.3.1 Общие положения
Размеры PSF или LSF в поперечном направлении соответствуют поперечному разрешению высококонтрастных мишеней системы визуализации для определенных положений вдоль оси пучка (т.е. для определенных глубин в фантоме). Подходящие для измерения PSF тест-объекты (фантомы) показаны на рисунках С.3 и С.4 (приложение С); второй из них применяют, чтобы исключить реверберацию из-за присутствия в пучке держателя проволоки. LSF измеряют по тест-объектам, показанным на рисунках А.1-А.2 (приложение А) и С.1 (приложение С). Измерения поперечного разрешения на многомишенном тест-объекте проводят редко, и их не рассматривают в настоящем стандарте. Измерения допускается проводить по всей глубине изображения через промежутки, меньшие 1/7 осевой длины обзорного поля, и на расстояниях от края изображения в поперечном направлении, равных 1/8 ширины изображения. Для систем объемной визуализации, в которых PSF может зависеть от места расположения по толщине в рассматриваемом объеме, измерения выполняют в поперечных направлениях, соответствующих толщине и ширине рассматриваемого объема, на расстояниях от краев, равных 1/8 толщины и ширины соответственно. Должны быть выявлены и внесены в протокол источники изменчивости показаний, как это определено в 6.4.2.
8.5.3.2 Процедура определения поперечных размеров
Ориентируют преобразователь так, чтобы получить максимальный сигнал от мишени (мишеней). Особенно важно направить ультразвуковой пучок перпендикулярно к нити. Устанавливают чувствительность системы так, как это указано в 8.5.2.2. Получают несколько изображений нитевидного фантома в В-режиме и оцифровывают лучшее из них. Убеждаются, что ультразвуковой преобразователь надежно установлен на поверхности тест-объекта, а центральная линия сканирования перпендикулярна к поверхности акустического окна тест-объекта.
Для измерений PSF необходимо выполнить двухмерное (2D) сканирование точечной мишени в каждом обусловленном месте ее расположения после того, как будет завершена юстировка направления центральной оси или центральной плоскости пучка, или плоскости обзора. При измерениях PSF или LSF получают такое изображение тест-объекта, в котором видны нити по всему диапазону глубин, присущему испытуемому преобразователю. Используют программу обработки изображения, чтобы получить профиль по яркости в горизонтальном направлении для множества следующих друг за другом линий сканирования, перекрывающих изображаемую точечную мишень, при вертикальном перемещении (горизонтальной линии отсчета) от верха до дна (над изображением поперечных сечений нитей и под ними) до тех пор, пока амплитуда профиля изображения мишени не станет максимальной. Для каждой глубины расположения нитей, используя эту максимальную амплитуду, измеряют и вносят в протокол полную ширину пятна на половине от максимума (FWHM) и ширину на уровне минус 20 дБ. По изображению фантома измеряют размер пятен по оси для всех положений (по глубине) видимых мишеней. Получив все значения этой ширины, строят зависимость ширины на уровне FWHM или минус 20 дБ от глубины в изображении фантома. Будет видна и ширина профиля при соответствующем уровне сигнала, близком к предполагаемому уровню помехи, если это позволяют артефакты, имеющиеся на изображении.
По изображению фантома измеряют зависимость максимального поперечного размера от глубины для всех положений (по глубине) видимых PSF. Получив все значения этой ширины, строят зависимость этой ширины на уровне FWHM или минус 20 дБ от глубины в изображении фантома. Для большинства систем визуализации поперечное разрешение изменяется с глубиной гораздо больше, чем разрешение по оси.
Примечание - Использование тест-объекта, показанного на рисунке А.2 (приложение А), может быть неприемлемым для некоторых ультразвуковых преобразователей, которые излучают настолько большие боковые лепестки, что они интерферируют с эхосигналами от соседних нитей. В этом случае может быть использован тест-объект, подобный показанному на рисунке А.1 (приложение А). В таком тест-объекте линии мишеней расположены под углом друг к другу, так что отдельные мишени в редких случаях расположены на одной горизонтальной линии. Более подходящий тест-объект показан на рисунке С.1 (приложение С), в котором все нитевидные мишени расположены отдельно, без соседей в поперечном направлении. И, кроме того, может быть использована одна нить (или проволока) с устройством микроперемещений, подобным показанному на рисунке С.3 (приложение С), но перпендикулярная к ультразвуковому пучку.
8.5.4 Толщина слоя сканирования (толщинные PSF и LSF) или разрешающая способность по толщине
Наиболее простой метод измерения толщины слоя (или пучка) заключается в сканировании тонкого слоя рассеивающих мишеней, показанного на рисунке С.5 (приложение С). Толщину слоя (или разрешение по размеру пятна в направлении толщины пучка) следует измерять на каждой глубине, при этом органы регулировки чувствительности и параметров изображения следует устанавливать в положения, соответствующие калибровке системы визуализации. Исследуют максимально большую область изображения, разделенную на пять частей одинакового размера. Плоскость сканирования ориентируют так, чтобы она пересекала слой рассеивателей по линии, параллельной верхней поверхности тест-объекта. Плоскость сканирования должна быть в то же время перпендикулярна к поверхности сканирования тест-объекта. С целью измерить толщину слоя в середине первого сечения датчик устанавливают так, чтобы на этой глубине находилась линия пересечения плоскости ультразвукового сканирования и слоя рассеивателей. Методом визуального отсчета или с использованием соответствующей обработки изображения измеряют максимальную толщину изображения слоя по вертикали и вычисляют толщину слоя (толщину сканирования) в центре первого сечения, как это показано на рисунке С.5 (приложение С). Повторяют эту процедуру и для остальных четырех сечений. С помощью программной обработки оцифрованного изображения измеряют ширину изображения сечения при заданном уровне снижения сигнала: например, при минус 6 дБ, минус 20 дБ или до уровня помехи, относительно его максимального значения.
При измерениях толщинной PSF с помощью точечной мишени, изображенной на рисунке С.3 или С.4 (приложение С), или толщинной LSF с помощью горизонтально расположенной проволоки, изображенной на рисунке С.3 (приложение С), или тест-объекта с нитевидными мишенями, изображенного на рисунках А.1 или А.2 (приложение А) или С.1 (приложение С), система работает в режиме В. Мишень перемещают перпендикулярно к плоскости ультразвукового сканирования (или, наоборот, - перемещают плоскость сканирования относительно мишени) до получения максимальной амплитуды сигнала от мишени. Перемещение осуществляют в двух противоположных направлениях вдоль линии, перпендикулярной к плоскости сканирования, чтобы дважды подтвердить найденные положения максимума и заданного уровня снижения сигнала. Таким образом получают уровни сигнала со снижением минус 6 дБ и минус 20 дБ относительно максимума, уровень помехи и другие параметры. Расстояние между точками по обеим сторонам плоскости сканирования и будет разрешением по толщине при уровне измерения минус 6 дБ или минус 20 дБ.
Измерения могут быть проведены во всем диапазоне глубин визуализации ультразвукового датчика с шагом перемещений, меньшим 1/7 обзорного поля вдоль центральной оси, и на расстояниях от края изображения в поперечном направлении, равных 1/8 ширины изображения. Для систем объемной визуализации, в которых PSF может зависеть от места расположения по толщине в рассматриваемом объеме, измерения выполняют в поперечных направлениях, соответствующих толщине и ширине рассматриваемого объема, на расстояниях от краев, равных 1/8 толщины и ширины соответственно. Должны быть выявлены и внесены в протокол источники изменчивости показаний, как это установлено в 6.4.2.
Измерения разрешающей способности по толщине могут быть упрощены при использовании решетки одинаковых точечных мишеней, расположенных по наклонной (относительно плоскости сканирования) линии. Мишени должны быть расположены на таких расстояниях, чтобы их изображения отстояли друг от друга дальше, чем поперечное разрешение сканера на заданной глубине. Если установленная в центре мишень имеет сечение обратного рассеяния, меньшее на требуемый уровень, чем другие мишени, то измерения выполняют при одинаковой интенсивности сигналов.
Приложение А
(обязательное)
Тест-объекты. Калибровка двухмерных систем измерения
Примечание - Рассмотренные в настоящем приложении тест-объекты и материалы заимствованы из некоторых национальных отчетов и проектов стандартов. Тест-объекты ограничены теми конструкциями, которые были проверены на практике.
А.1 Конструкции тест-объектов
На рисунках А.1 и А.2 показаны наборы параллельно расположенных нитей, используемых в качестве линейных мишеней. Нити параллельны также верхней поверхности, служащей акустическим окном для сканирования. На этих рисунках представлены две возможные компоновки мишеней в сечении, перпендикулярном к нитям. Компоновка на рисунке А.2 имеет преимущество перед компоновкой на рисунке А.1 благодаря более регулярной структуре, но имеет также недостаток вследствие вероятности затенения какой-либо мишени другими мишенями, расположенными выше нее.
Размеры этих тест-объектов и расстояния между мишенями оптимальны для испытаний датчиков с номинальными частотами от 2 до 5 МГц, используемых при общих абдоминальных исследованиях. Расстояния между нитями в каждом ряду равны 2 см. Рекомендуется, чтобы точность расположения нитей была не хуже ±0,2 мм. Для более высокочастотных систем визуализации требуется более частое расположение нитей (с расстоянием 1 см между ними), при этом точность их расположения должна быть не хуже ±0,1 мм, а размеры тест-объекта в целом могут составлять 1/3 соответствующих размеров тест-объектов, показанных на рисунках А.1 и А.2.
Каждый тест-объект, рассматриваемый в настоящем стандарте (рисунки А.1 и А.2), предназначен для сканирования непосредственно в рабочей жидкости. Для снижения эффекта затенения в тест-объектах применяют нейлоновые нити диаметром 0,078 мм. Резервуар должен быть достаточно большим, чтобы обеспечить необходимую ориентацию любого датчика на мишенную структуру.
В ином случае мишени, показанные на рисунках А.1 и А.2, размещают в тканеимитирующем материале, а сканирование осуществляют через акустическое окно из соответствующего материала, например через полиэтиленовую пленку. Материал этого окна должен предотвращать испарение воды из тканеимитирующего материала. В связи с тем, что тканеимитирующий материал имеет заданные характеристики рассеяния, более предпочтительно использование не нейлоновых нитей, а проволочек, дающих более сильное отражение. Подходящим материалом для таких мишеней будет проволока из нержавеющей стали диаметром 0,15 мм. Она достаточно тонка, чтобы не вызывать внутренних ревербераций на всех частотах, используемых для диагностики. Точность расположения каждой из этих мишеней в тест-объекте должна быть не хуже ±0,4 мм.
В этих структурах использовано параллельное расположение нитей как наиболее подходящее для широко применяемых фантомов для калибровки двухмерных изображений. Их допускается применять и для испытаний систем трехмерной визуализации, реализующих поворот датчика на 90° вокруг оси, перпендикулярной к нитям и расположенной по центру фантома или изображаемого объема. Использование таких фантомов для калибровки систем трехмерной визуализации рассмотрено в [29], [30].
Калибровка тест-объектов зависит от скорости звука в среде (рабочей жидкости или тканеимитирующем материале). Скорость звука зависит от температуры. Если жидкость не закрыта сверху, то следует учитывать изменение состава раствора из-за испарения его компонентов (например, спирта). Установленные предельные значения скорости звука (1540±15) м/с соответствуют погрешности результатов, равной ±1%. Такое значение погрешности приемлемо, если иметь в виду изменения скорости звука в теле человека.
А.2 Схемы тест-объектов
Рисунок А.1 - Решетка нейлоновых нитей в виде концентрических кругов
Примечание - На фантоме выделено изображение эллипса, используемого для измерений длины кривых линий, например, периметра.
Рисунок А.2 - Прямоугольная двухмерная решетка из нейлоновых нитей
Приложение В
(обязательное)
Тест-объекты. Точность измерений и калибровки систем восстановления трехмерных изображений
В.1 Фантом с нитевидными мишенями, заполненный рабочей жидкостью
Фантомы, рассмотренные в приложении А (рисунки А.1 и А.2), пригодны как для двухмерных, так и для трехмерных измерений.
В.2 Фантом с нитевидными мишенями, заполненный тканеимитирующим материалом
На рисунке А.1 приложения А показан фантом с нитевидными мишенями на основе рассеивающего материала, пригодный для двухмерных и трехмерных измерений расстояний и оценки искажений изображения. При оценке трехмерных изображений датчик перемещают в направлении толщины слоя ультразвукового сканирования слева направо (на указанном рисунке) для того, чтобы оценить его положение в направлении толщины слоя. Относительные положения всех нитей должны быть выдержаны с точностью не хуже ±0,2 мм. Для оценки точности измерений длины дуги, периметра, площади и объема используют изображение эллипса (или эллиптического стержня) с осями ±2,7 см и
±3 см, показанное на рисунке А.2 (приложение А). Площадь и окружность (периметр) эллипса равны соответственно
![]() 25,4 см
25,4 см и приблизительно
![]() 17,9 см. Измерения периметра и площади круга, объема и площади поверхности цилиндрического стержня проще выполнить по фантому рисунка А.1, а прямоугольных форм - по фантому рисунка А.2 (приложение А). Объем и площадь поверхности стержней соответственно равны площади поперечного сечения, умноженной на длину, и периметру, умноженному на длину, плюс две площади поперечного сечения.
17,9 см. Измерения периметра и площади круга, объема и площади поверхности цилиндрического стержня проще выполнить по фантому рисунка А.1, а прямоугольных форм - по фантому рисунка А.2 (приложение А). Объем и площадь поверхности стержней соответственно равны площади поперечного сечения, умноженной на длину, и периметру, умноженному на длину, плюс две площади поперечного сечения.
В.3 Тест-объект с яйцеобразной мишенью из тканеимитирующего материала
Требования к характеристикам трехмерных пятнистых объектов яйцеобразной формы:
- Коэффициент затухания равен коэффициенту затухания в материале основы - ±0,2 дБ·см·МГц
.
- Скорость звука равна скорости звука в материале основы - ±6 м·с [9], [31].
- Яйцеобразные объекты имеют коэффициент обратного рассеяния - минус (10±2) дБ относительно стандартного материала основы, коэффициент обратного рассеяния на 3 МГц равен 3·10 см
·ср
±6 дБ (с зависимостью от частоты как
в диапазоне от 1 до 15 МГц).
В.4 Измерения пространственных характеристик объектов с рассеивателями
Для измерений пространственных характеристик объектов с рассеивателями подходят тест-объекты, показанные на рисунках В.1-В.4. Такой тест-объект представляет собой трехмерное тело в форме яйца, геометрические параметры которого определяют по двум полуэллипсоидам вращения (сплющенным сфероидам), соединенным торцами.
На виде сбоку (рисунок В.1) даны изображения двух эллипсоидов по длинным осям. Два изображения поперечных сечений приведены на рисунке В.2, а на рисунках В.3 и В.4 показаны их проекции.
Примечание - Для практического применения в лечебных учреждениях, где нет соответствующего фантома, необходимые формы трехмерных объектов допускается создавать из материала с низким затуханием, такого, например, как ограниченная сеткой пена [6], [32], погруженная в соляной раствор или другую жидкость, чтобы значения скорости звука в 3D-объекте и окружающей жидкости совпадали, разница в затухании была приблизительно равна 0,5 дБ·см·МГц
, а коэффициент обратного рассеяния 3D-объекта (яйца) на 3 МГц составлял 3·10
см
·ср
±16 дБ (с частотной зависимостью, пропорциональной (
![]() ) в диапазоне от 1 до 7 МГц).
) в диапазоне от 1 до 7 МГц).
В.5 Схемы тест-объектов
Рисунок В.1 - Фантом с тканеимитирующими яйцеобразными мишенями
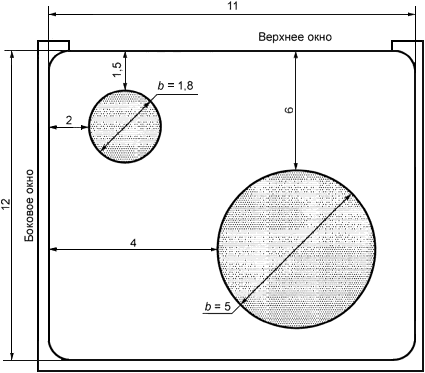
Рисунок В.2 - Композиция изображений двух поперечных сечений мишеней, показанных на рисунке В.1. Вид через боковое окно
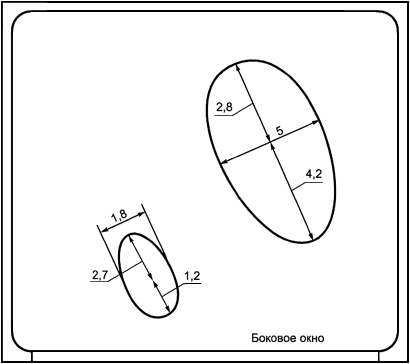
Рисунок В.3 - Проекция тест-объекта, показанного на рисунке В.1 (вид сверху)
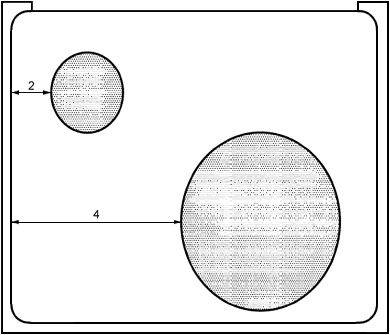
Рисунок В.4 - Проекция тест-объекта, показанного на рисунке В.1 (вид сбоку)
Приложение С
(обязательное)
Тест-объекты. Измерение функции размывания точки
Примечание - Описанные в настоящем приложении тест-объекты и материалы взяты из нескольких национальных стандартов и проектов к ним. Тест-объекты ограничены тест-объектами тех типов, которые опробованы на практике.
С.1 Конструкции тест-объектов
Каждый из тест-объектов, рассмотренных в настоящем стандарте (рисунки А.1, А.2 (приложение А) и С.1-С.5 (приложение С)), разработан для их сканирования непосредственно в рабочей жидкости. Для снижения эффектов затенения в них использованы нейлоновые нити, как правило, диаметром 0,1 мм. Для обеспечения испытаний любых преобразователей при требуемой для них ориентации относительно мишеней бак с жидкостью должен быть существенно большим. В некоторых случаях (см. раздел 5) рабочую жидкость допускается заменить водой.
Другой подход заключается в использовании мишенных структур, погруженных в тканеимитирующий материал, при сканировании через акустическое окно из подходящего материала, например полиэтилена. Материал акустического окна должен предотвращать потерю воды из тканеимитирующего материала. Для усиления эхосигналов в тест-объектах с тканеимитирующим материалом предпочтительнее использовать проволоку, а не нейлоновые нити. Для этого подходит проволока из нержавеющей стали диаметром 0,15 мм. Эта проволока должна быть тонкой, чтобы исключить искажения эхосигнала из-за реверберации. Проволочные мишени следует располагать в каждом тест-объекте с точностью ±0,25 мм.
С.2 Решетка из нитей в воде (рисунок С.1)
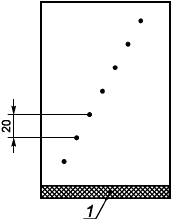
1 - поглотитель
Рисунок С.1 - Нитевидный тест-объект для измерения LSF
Двухмерная решетка из нитей или проволочек, показанная на рисунке А.1 (приложение А), установлена в специальной рамке. Требования к нитям или проволочкам указаны в А.1 (приложение А).
С.3 Тест-объект для проверки осевого разрешения (рисунок С.2)
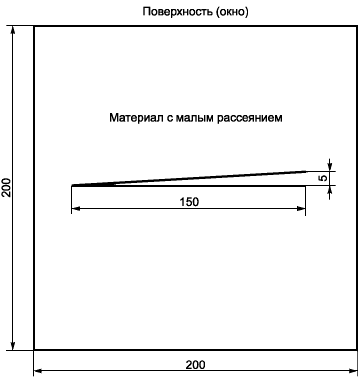
Рисунок С.2 - Тест-объект для оценки осевого разрешения
Две нейлоновые нити диаметром 0,1 мм натянуты в одной вертикальной плоскости под углом друг к другу, как это показано на рисунке С.2. Нити могут быть расположены на различной глубине. Жидкость наливают в кубическую емкость с длиной ребра 20 см.
С.4 Одиночная нить с возможностью перемещения в воде (рисунки С.3, С.4)
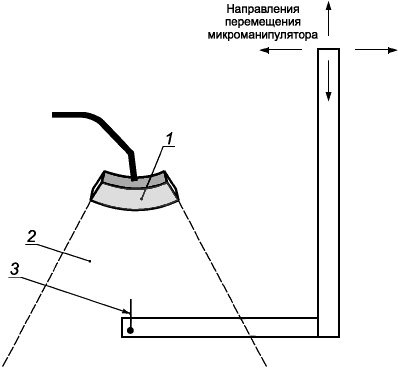
1 - преобразователь; 2 - обзорное поле; 3 - линейная мишень
Рисунок С.3 - Перемещающаяся в воде одиночная мишень
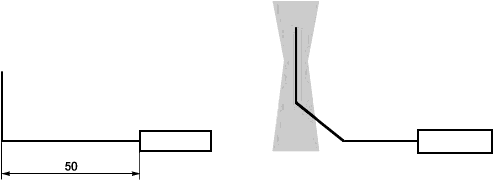
Примечание - Первая часть обеих мишеней может быть соединена с устройством сканирования.
Рисунок С.4 - Эскиз двух точечных мишеней из проволоки диаметром 0,24 мм
Нить укреплена в устройстве микроперемещений (см. рисунок С.3) таким образом, чтобы обеспечить ее перемещение в пределах обзорного поля сканера. Нить должна удовлетворять требованиям раздела А.1 (приложение А). Другим вариантом может быть использование тонкой металлической проволоки, как это показано на рисунке С.4. Диаметр проволоки должен быть намного меньше ширины пучка испытуемого преобразователя и меньше , соответствующей низкочастотным преобразователям.
С.5 Тест-объект для определения толщины слоя сканирования (рисунок С.5)
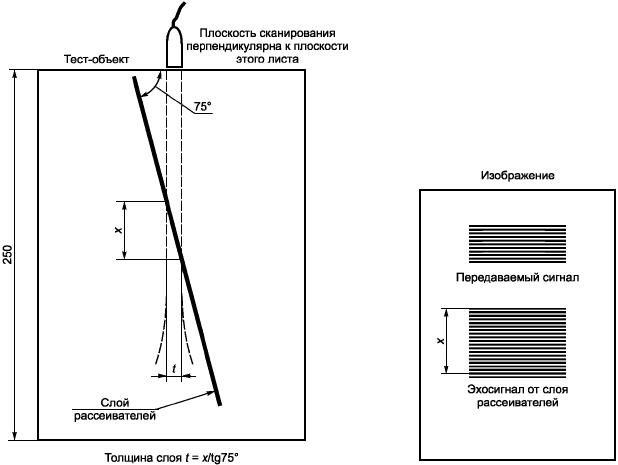
Рисунок С.5 - Измерения и расчет толщины слоя рассеивателей
a) Слой рассеивателей располагают под углом 75° к верхней поверхности [33]. Для этого слоя подходит материал с коэффициентом обратного рассеяния, на 50 дБ большим, чем окружающая среда, и толщиной меньше 0,4 мм.
b) Методика вычисления толщины слоя сканирования рассмотрена в 8.5.4.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов ссылочным национальным стандартам Российской Федерации
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
МЭК 61102:1991 | - | * |
МЭК 61685:2001 | - | * |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. | ||
Библиография
[1] | IEC 61390:1996, Ultrasonics - Real time pulse echo systems - Test procedures to determine performance specifications |
[2] | IEC 61828:2001, Ultrasonics - Focusing transducers - Definitions and measurement methods for the transmitted fields |
[3] | IEC 60584:1986, Methods of measuring the performance of ultrasonic pulse echo diagnostic equipment |
[4] | IEC 61157:1992, Requirements for the declaration of the acoustic output of medical diagnostic ultrasound equipment |
[5] | IEC 60050-801, International Electrotechnical Vocabulary (IEV) - Chapter 801: Acoustics and Electroacoustics |
IEC 60050-802, International Electrotechnical Vocabulary (IEV) - Chapter 802: Ultrasonics | |
[6] | Madsen E.L., Zagzebski J.A., Banjavic R.A. and Jutila R.E. Tissue mimicking materials for ultrasound phantoms. Med. Phys., 1978, 5: p.391-394 |
[7] | USDHHS, Quality Assurance in Diagnostic Ultrasound. Ed. A. Goldstein, Rockville, Maryland: U.S. Department of Health and Human Services, 1980 |
[8] | Goldstein A. and Langrill L.N. Ethylene glycol-water mixtures for use in ultrasound test objects. J. Clin. Ultrasound, 1979, 7: p.465-470 |
[9] | AIUM, Methods for specifying acoustic properties of tissue mimicking phantoms and objects: stage 1. Laurel, Maryland: American Institute of Ultrasound in Medicine, 1995 |
[10] | AIUM, Methods for measuring performance of pulse-echo ultrasound imaging equipment, part II: digital methods, stage 1. 1995, Laurel, Maryland: American Institute of Ultrasound in Medicine |
[11] | Fenster A. and Downey D.B. 3-D Ultrasound imaging: A review. IEEE Trans. Engineering in Medicine and Biology, 1996, 15: p.41-51 |
[12] | Nelson T.R. and Pretorius D.H. Three-dimensional ultrasound imaging. Ultrasound in Medicine and Biology, 1998, 24: p.1248-1270 |
[13] | Muratore D.M. and Galloway R.L. Beam calibration without a phantom for creating a 3-D freehand ultrasound system. Ultrasound in Medicine and Biology, 2001, 27: p.1557-1566 |
[14] | Chen J-F, Fowlkes J.B., Carson P.L. and Rubin J.M. Determination of Scan-Plane Motion Using Speckle Decorrelation: Theoretical Considerations and Initial Test. Internat. J. Imaging Systems and Technology, 1997, 8: p.38-44 |
[15] | Tuthill T.A.. Krucker J.F., Fowlkes J.B. and Carson P.L. Automated three-dimensional US frame positioning computed from elevational speckle decorrelation. Radiology, 1998, 209 (2): p.575-582 |
[16] | AIUM, Standard methods for calibration of 2D and 3D spatial measurement capabilities and measurement of point spread response function of pulse echo ultrasound imaging systems, AIUM Technical Report, eds. P.L. Carson, T. DuBose, R. Hileman, H. Lopez, N. McDicken, M. Stone, K. Wear and J. A. Zagzebski, Laurel, Maryland: American Institute of Ultrasound in Medicine, 2004 |
[17] | Handbook of Mathematical Tables. 2 |
[18] | Dubose T. "Cranial Biometry", in Fetal sonography. W.B. Saunders, 1995, Chapter 8 |
[19] | AIP, Pulse echo ultrasound imaging systems: Performance tests and criteria. AAPM report #8. Eds. P.L. Carson and J.A. Zagzebski, New York, New York: American Institute of Physics, 1981 |
[20] | AIUM, Standard methods for measuring performance of ultrasound imaging equipment. Laurel, Maryland: American Institute of Ultrasound in Medicine, 1991 |
[21] | Selfridge A. Approximate Material Properties in Isotropic Materials. IEEE Trans. Sonics Ultrasonics, 1985, SU-32: p.381-384 |
[22] | Haigis W. and Buschmann W. Echo reference standards in ophthalmic ultrasonography. Ultrasound in Medicine and Biology, 1985, 11: p.149-155 |
[23] | Carson P.L., Rapid evaluation of many pulse echo system characteristics by use of a trigged pulse burst generator with exponential decay. J. Clin. Ultrasound, 1976, 4: p.259-263 |
[24] | Faran J. Sound scattering by solid cylinders and spheres. J. Acoust. Soc. Amer., 1951, 23 (4): p.405-418 |
[25] | Preston R.C. and Bond A.D. An experimental study of the reflection from spherical and flat ended cylindrical targets suitable for fetal Doppler performance assessment. Ultrasound in Medicine and Biology, 1997, 23: p.117-128 |
[26] | Psychoudakis D., Fowlkes J.B., Volakis J.L. and Carson P.L. Potential of microbubbles for use as point targets in phase aberration correction. IEEE rans. UFFC, 2004, 51: p.1639-1648 |
[27] | Sboros V. et. Al. Absolute measurement of ultrasonic backscatter from single microbubbles. Ultrasound in Medicine and Biology, 2005, 31: p.1063-1072 |
[28] | Hefner L.V. and Goldstein A. Resonance by rod-shaped reflectors in ultrasound test objects. Radiology, 1981, 139: p.189-193 |
[29] | Dandekar S., Yinbo L., Molloy J. and Hossack J. A phantom with reduced complexity for spatial 3-D ultrasound calibration. Ultrasound in Medicine and Biology, 2005, 31: p.1083-1093 |
[30] | Poon T.C. and Rohling R.N. Comparison of calibration methods for spatial tracking of a 3-D ultrasound probe. Ultrasound in Medicine and Biology, 2005, 31: p.1095-1108 |
[31] | Davros W.J., Zagzebski J.A. and Madsen E.L. Frequency-dependent angular scattering of ultrasound by tissue-mimicking materials and excised tissue. J. Acoust. Soc. Amer., 1986, 80: p.229-237 |
[32] | Satrapa J., Schultz H-J. and Doblhoff G. Latest advances in quality control for ultrasonic pulse echo imagers. In Euroson. 2001s. Edinburgh |
[33] | Goldstein A. Slice thickness measurement. Ultrasound Med, 1988, 7: p.487-498 |
Электронный текст документа
и сверен по:
, 2012
{kind=link}