ГОСТ ISO 16231-2-2019
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины самоходные сельскохозяйственные
ОЦЕНКА УСТОЙЧИВОСТИ
Часть 2
Определение статической устойчивости и методы испытания
Self-propelled agricultural machinery. Assessment of stability. Part 2. Determination of static stability and test procedures
МКС 65.060.01
Дата введения 2020-08-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Межгосударственным техническим комитетом по стандартизации МТК 284 "Тракторы и машины сельскохозяйственные"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 30 сентября 2019 г. N 122-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
Узбекистан | UZ | Узстандарт |
(Поправка. ИУС N 8-2020).
4 Приказом Федерального агентства по техническому регулированию и метрологии от 23 октября 2019 г. N 1053-ст межгосударственный стандарт ГОСТ ISO 16231-2-2019 введен в действие в качестве национального стандарта Российской Федерации с 1 августа 2020 г.
5 Настоящий стандарт идентичен международному стандарту ISO 16231-2:2015* "Машины самоходные сельскохозяйственные. Оценка устойчивости. Часть 2. Определение статической устойчивости и методы испытания" ("Self-propelled agricultural machinery - Assessment of stability - Part 2: Determination of static stability and test procedures", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт ISO 16231-2:2015 разработан Техническим комитетом по стандартизации ISO/TC 23 "Тракторы и машины для сельского и лесного хозяйства".
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
ВНЕСЕНА поправка, опубликованная в ИУС N 8, 2020 год
Поправка внесена изготовителем базы данных
Введение
При работе на самоходной сельскохозяйственной машине, управляемой сидящим оператором, может возникнуть опасность сваливания и опрокидывания. При оценке риска необходимо выявлять данную опасность с учетом специфики машины и, где это приемлемо, применять защитные меры для того, чтобы избежать или минимизировать опасность опрокидывания для сидящего оператора. Для многих типов машин эта оценка риска будет отражена в требованиях стандартов на конкретный вид машины.
При оценке риска следует учитывать условия эксплуатации, для которых предназначена машина, ее физические характеристики, требования к квалификации оператора, а также другие параметры, которые могут вызвать риск опрокидывания или сваливания.
1 Область применения
Настоящий стандарт устанавливает метод определения центра тяжести ненагруженных самоходных машин, нагруженных машин, а также машин, агрегатированных дополнительным оборудованием, и методы определения угла статического опрокидывания.
Примечание - Требования к защитным конструкциям и устройствам защиты при опрокидывании установлены в соответствующих стандартах.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
ISO 789-6:1990, Agricultural tractors - Test procedures - Part 6: Centre of gravity (Тракторы сельскохозяйственные. Методы испытаний. Часть 6. Центр тяжести)
ISO 16231-1:2013, Self-propelled agricultural machinery - Assessment of stability - Part 1: Principles (Машины самоходные сельскохозяйственные. Оценка устойчивости. Часть 1. Принципы)
3 Термины и определения
В настоящем стандарте применены термины по ISO 16231-1, а также следующие термины с соответствующими определениями:
3.1 максимальный рабочий уклон; MOS (maximum operating slope, MOS): Установленное значение угла уклона, %, для каждого типа самоходной машины в каждом направлении, в котором машина, как правило, функционирует в соответствии с областью ее применения.
3.2 система компенсации уклона (slope compensation system): Система, предназначенная для расширения функциональных возможностей сельскохозяйственной машины при работе на уклоне, без изменения угла наклона корпуса машины, посредством наклона внутренних компонентов, настройки движущихся узлов, или отсоединения систем, или перераспределения силы и (или) направления потоков воздуха.
3.3 система изменения угла наклона корпуса (body levelling system): Система, предназначенная для расширения функциональных возможностей сельскохозяйственной машины, повышения удобства оператора, возможностей работы на уклоне и устойчивости машины при работе на уклоне посредством наклона корпуса машины в продольной и (или) поперечной плоскостях.
4 Определение центра тяжести самоходной машины
4.1 Метод определения и расчета центра тяжести ненагруженной машины
Центр тяжести COG ненагруженной машины определяют посредством весов и поддерживающих опор (см. таблицы 1 и 2 и рисунки 1-3).
4.2 Примечания и особенности процедуры
4.2.1 Процедура - по ISO 789-6. Этот метод основан на увеличении нагрузки на опорную ось в тот момент, когда вторая ось поднята и поддерживается на определенной высоте. Угол подъема ![]() и увеличение нагрузки на весы позволяют определить высоту расположения COG.
и увеличение нагрузки на весы позволяют определить высоту расположения COG.
4.2.2 Рекомендуется использовать стальные колеса для исключения изменения радиуса колеса при изменении условий нагружения. Расчет COG с обычными колесами приведен в 4.3.
Подвеска машины должна быть заблокирована. В случае невозможности блокирования подвески давление в шинах должно иметь максимальное значение, указанное изготовителем шин. Разница радиусов колес на зафиксированной оси в горизонтальном и поднятом положениях не должна превышать 1,5% радиуса колеса.
4.2.3 Плоскость весов должна быть расположена горизонтально на уровне опорной поверхности.
4.2.4 Колеса, расположенные на весах, должны иметь возможность вращаться для исключения влияния сил трения шин. Стояночная тормозная система должна быть отключена, и трансмиссия установлена в нейтральное положение или положение для буксировки.
4.2.5 Необязательно, но предпочтительно поднимать машину со стороны качающейся оси; в большинстве случаев эта ось оснащена колесами с наименьшим диаметром.
4.2.6 Поднятые колеса должны опираться на поддерживающие опоры до момента определения показаний весов.
4.2.7 Для облегчения установки поддерживающих опор может потребоваться заблокировать качающуюся ось при подъеме машины.
После установки колес на поддерживающие опоры блокировка должна быть снята.
4.2.8 Точность метода зависит от соотношения высоты поддерживающих опор и колесной базы машины и точности весов.
Для обеспечения точности взвешивание проводят последовательно не менее пяти раз; все полученные значения должны быть в пределах 1,0% от максимальной измеренной нагрузки на зафиксированную ось в поднятом положении.
4.2.9 Расчет COG проводят с учетом погрешности весов и определяют погрешность высоты расположения COG.
Погрешность не должна превышать ±4%. Если погрешность превышает ±4%, высоту поддерживающих опор следует увеличить для обеспечения снижения погрешности.
Таблица 1 - Значения для расчета положения центра тяжести COG
Описание | Обозначение | Единица измерения |
Статический радиус колеса фиксированной оси (см. рисунок 2) |
| мм |
Статический радиус колеса качающейся оси (поднятой оси) (см. рисунок 2) | мм | |
Колесная база (см. рисунок 1, вид сверху) |
| мм |
Нагрузка на левое колесо фиксированной оси в горизонтальном положении (см. рисунок 1, вид сзади) |
| Н |
Нагрузка на правое колесо фиксированной оси в горизонтальном положении (см. рисунок 1, вид сзади) |
| Н |
Нагрузка на качающуюся ось в горизонтальном положении (см. рисунок 1, вид сзади) |
| Н |
Нагрузка на фиксированную ось в поднятом положении (колеса качающейся оси установлены на поддерживающие опоры) (см. рисунок 3) |
| Н |
Высота поддерживающих опор (см. рисунок 3) | мм | |
Расстояние между внешними кромками колес на фиксированной оси (см. рисунок 1, вид сверху) | мм | |
Ширина колеса на фиксированной оси (см. рисунок 1, вид сверху) |
| мм |
Боковое смещение точки вращения качающейся оси (вправо считается положительным) (см. рисунок 1, вид сверху) | a | мм |
|
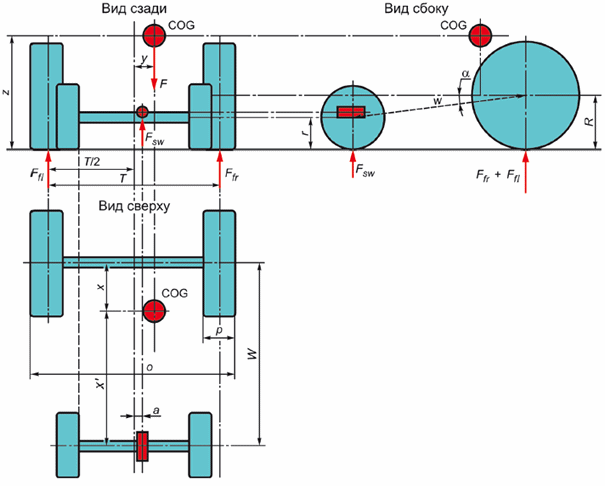
Рисунок 1 - Вид машины сзади, сверху и сбоку
|
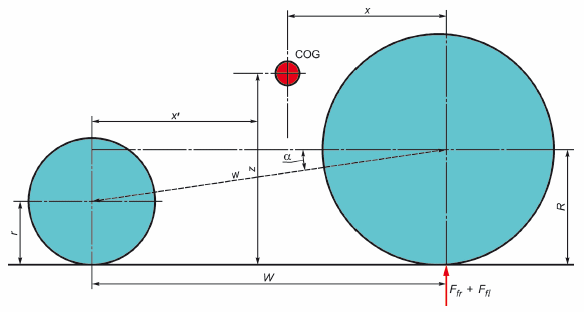
Рисунок 2 - Машина в горизонтальном положении (вид сбоку)
|
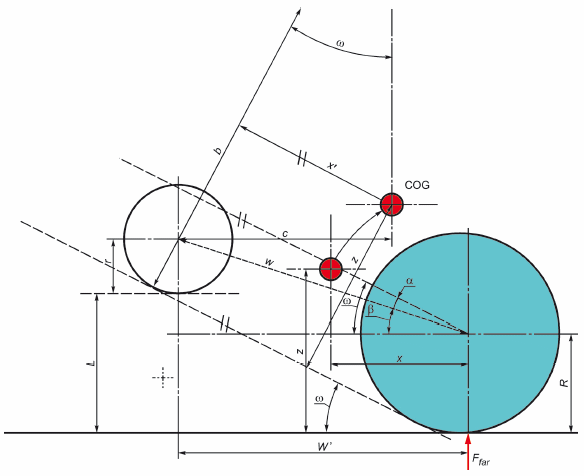
Рисунок 3 - Машина в поднятом положении (вид сбоку)
Таблица 2 - Расчет положения центра тяжести COG
Описание параметра | Обозначение | Единица измерения | Расчет |
Ширина колеи фиксированной оси | мм |
| |
Общий вес машины |
| Н |
|
Боковое смещение COG (относительно центра фиксированной оси) (положительные значения вправо от центра фиксированной оси по рисунку 1) | мм |
| |
Продольное положение COG (относительно оси вращения качающейся оси) |
| мм |
|
Продольное положение COG (относительно вращения оси фиксированной оси) | мм |
| |
Продольное расстояние между центрами колес |
| мм |
|
Проекция колесной базы на горизонтальную плоскость в поднятом положении |
| мм |
|
Угол между линией, проходящей через центры колес, и горизонтальной линией, проходящей через центр колес фиксированной оси |
| ° |
|
Угол между линией, проходящей через центры колес, и горизонтальной линией, проходящей через центр колес фиксированной оси в поднятом положении |
| ° |
|
Угол подъема |
| ° |
|
Проекция продольного расстояния между COG и осью вращения качающейся оси на горизонтальную плоскость в поднятом положении | мм |
| |
Дополнительная линия для проведения расчетов |
| мм |
|
Высота расположения COG | мм |
|
Примечание - Пример расчета центра тяжести приведен в приложении А.
4.3 Методы определения центра тяжести нагруженной машины или машины с установленным дополнительным оборудованием
4.3.1 Графический метод
4.3.1.1 В связи с непрактичностью и возможными опасностями при взвешивании груженой машины, агрегатированной дополнительным оборудованием, рекомендуется определять центр тяжести нагруженной машины посредством графического метода.
Подразумевается, что известен вес груза (например, зерна) и дополнительного оборудования.
4.3.1.2 В следующем примере описан комбайн с полным бункером зерна и жаткой в поднятом положении (наихудшие возможные условия).
Установленный центр тяжести ненагруженной машины (определенный, например, по 4.1) обозначают на масштабном чертеже машины (см. рисунок 4). Центр тяжести зерна в бункере может быть обозначен
![]() . Масса зерна составляет, например, 50% массы ненагруженной машины. Центр тяжести комбинации ненагруженной машины и зерна обозначен
. Масса зерна составляет, например, 50% массы ненагруженной машины. Центр тяжести комбинации ненагруженной машины и зерна обозначен ![]() и расположен на линии, соединяющей
и расположен на линии, соединяющей и
![]() на расстоянии 1/3 от
на расстоянии 1/3 от . Масса жатки, для примера, составляет 20% массы ненагруженной машины. Установленный центр тяжести жатки (определенный, например, взвешиванием на подъемнике под двумя разными углами) обозначают
![]() . Центр тяжести комбинации ненагруженной машины и жатки расположен на линии, соединяющей
. Центр тяжести комбинации ненагруженной машины и жатки расположен на линии, соединяющей и
![]() на расстоянии 1/6 от
на расстоянии 1/6 от . Центр тяжести нагруженной машины с установленным дополнительным оборудованием определяют аналогичным способом. Высоту и горизонтальное расположение центра тяжести определяют измерением на чертеже. Аналогично определяют боковое смещение центра тяжести.
Таблица 3 - Значения для расчета положения центра тяжести
Описание параметра | Обозначение | Единица измерения | Пример |
Вес ненагруженной машины | Н | 12000 | |
Вес зерна |
| Н | 6000 |
Вес жатки |
| Н | 2400 |
Центр тяжести ненагруженной машины | мм (х, z) | - | |
Центр тяжести зерна |
| мм (х, z) | - |
Центр тяжести жатки |
| мм (х, z) | - |
Общий центр тяжести ненагруженной машины и зерна |
| мм (х, z) | - |
Общий центр тяжести ненагруженной машины и жатки |
| мм (х, z) | - |
Общий центр тяжести ненагруженной машины, зерна и жатки |
| мм (х, z) | - |
Расстояние между |
| мм | 1500 |
Расстояние между | мм | 3600 |
|
Рисунок 4 - Машина с дополнительным оборудованием (вид сбоку)
Таблица 4 - Определение общего центра тяжести графическим методом
Описание | Обозначение | Единица измерения | Расчет | Пример |
Общий вес ненагруженной машины и зерна | Н |
| 18000 | |
Расстояние между |
| мм |
| 500 |
Общий вес ненагруженной машины и жатки | Н |
| 14400 | |
Расстояние между |
| мм |
| 600 |
Общий вес ненагруженной машины, зерна и жатки |
| Н |
| 20400 |
Расстояние между | мм | Измерено на чертеже | 1374 | |
Расстояние между | мм |
| 404 |
4.3.2 Математический метод
Примечание - Формы для определения общего центра тяжести COG, угла статического опрокидывания SOA и установленного угла статической устойчивости RSSA находятся по адресу: //standards.iso.org/iso/16231-2/ed-1/.
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() . (3)
. (3)
Примечание - При определении общего центра тяжести за точку отсчета горизонтальных расстояний принимают ось вращения передней оси машины. Горизонтальные расстояния до центров тяжести, расположенных на чертеже правее точки отсчета, считаются положительными, расположенных левее - отрицательными.
Таблица 5 - Определение общего центра тяжести расчетным путем
Описание | Обозначение | Единица измерения | Расчет | Пример |
Вес ненагруженной машины | Н | 12000 | ||
Вес зерна |
| Н | 6000 | |
Вес жатки |
| Н | 2500 | |
Горизонтальное расстояние между осью вращения передней оси и | мм | 1250 | ||
Горизонтальное расстояние между осью вращения передней оси и |
| мм | 1000 | |
Горизонтальное расстояние между осью вращения передней оси и |
| мм | -1500 | |
Вертикальное расстояние между опорной поверхностью и | мм | 1500 | ||
Вертикальное расстояние между опорной поверхностью и |
| мм | 2500 | |
Вертикальное расстояние между опорной поверхностью и |
| мм | 1000 | |
Общий вес |
| Н |
| 20500 |
Горизонтальное расстояние между осью вращения передней оси и |
| мм |
| 841 |
Вертикальное расстояние между опорной поверхностью и |
| мм |
| 1692 |
|
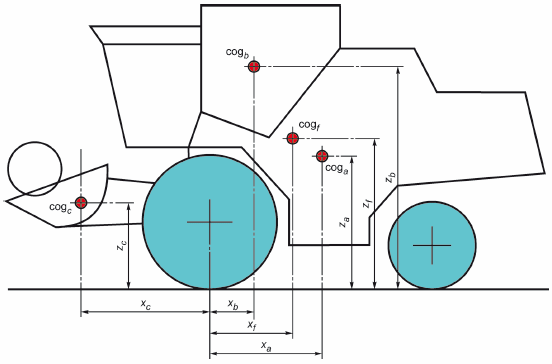
Рисунок 5 - Общий центр тяжести, определенный расчетным путем
5 Угол статического опрокидывания
5.1 Общее
Машина должна быть оборудована и отрегулирована для выполнения работы и может быть исследована нагруженной или ненагруженной в зависимости от того, в каком состоянии центр тяжести расположен наиболее высоко, в любой рабочей конфигурации.
5.2 Боковое опрокидывание: машины с одной зафиксированной осью и одной качающейся осью (без устройства ограничения наклона оси)
5.2.1 Общее
5.2.1.1 Для обеспечения постоянного контакта колес с опорной поверхностью многие самоходные машины имеют одну фиксированную и одну качающуюся ось.
Это условие должно быть учтено при определении угла статического опрокидывания. Для целей настоящего стандарта установлено, что линия бокового опрокидывания, проходящая через колеса фиксированной оси, проходит через опорную поверхность на расстоянии 75% ширины шины.
5.2.1.2 Треугольник устойчивости образован линиями АВ, ВС и АС (см. рисунок 6).
При расположении на наклоняемой платформе машина достигает, а затем превышает угол статического опрокидывания и переворачивается в тот момент, когда проекция центра тяжести на опорную поверхность выходит за пределы поверхности, образованной треугольником ABC, в котором:
- А и С - точки опрокидывания под колесами фиксированной оси, образованные пересечением линий АВ и ВС с проекцией оси вращения фиксированной оси на опорную поверхность;
- В - точка пересечения линии, проходящей через центр тяжести и точку вращения качающейся оси, с опорной поверхностью. Худшим случаем для опрокидывания является расположение машины на наклоняемой платформе вниз стороной, с которой расстояние между центром тяжести и линией АВ минимальное. При наклоне центр тяжести смещается в плоскости, перпендикулярной линии АВ. Из этого следует, что машина должна быть установлена на наклоняемой платформе таким образом, чтобы линия АВ была параллельна оси вращения наклоняемой платформы.
В полевых условиях это означает, что машина должна двигаться не параллельно уклону, а с небольшим движением вверх. Высота расположения центра тяжести и высота точки вращения качающейся оси определяют положение точки В. Треугольник устойчивости улучшается при увеличении высоты точки вращения и понижении и смещении вперед центра тяжести.
5.2.2 Графическое определение устойчивости
5.2.2.1 Для определения угла статической устойчивости может быть использован графический метод. Должна быть рассмотрена сторона с наихудшим случаем для опрокидывания. При неявности определения худшего случая следует проводить опрокидывание и влево, и вправо. На рисунке 6 показаны виды сверху и сбоку для той машины, у которой центр тяжести и точка вращения качающейся оси смещены относительно продольной плоскости симметрии машины (значения а и у не равны 0).
|
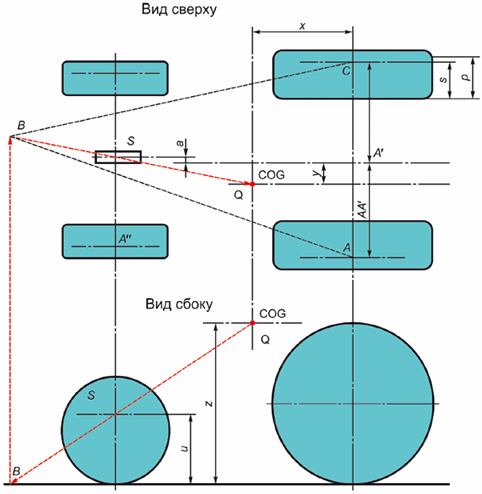
Рисунок 6 - Графическое определение треугольника устойчивости
5.2.2.2 Графическое определение треугольника устойчивости может быть выполнено на масштабном чертеже следующим образом (см. рисунки 6 и 7):
a) проводят линию QS на виде сбоку через COG Q и точку вращения качающейся оси S и определяют точку В пересечения этой линии с опорной поверхностью;
b) проводят на виде сбоку линию через точку В параллельно осям;
c) проводят линию QS на виде сверху;
d) на пересечении линии QS на виде сверху и линии, проходящей через точку В на виде сбоку, на виде сверху расположена точка В, являющаяся передней вершиной треугольника устойчивости.
5.2.2.3 Графическое определение угла статического опрокидывания SOA может быть выполнено на масштабном чертеже следующим образом (см. рисунок 7):
a) проводят линию ВА;
b) проводят линию DF на виде сверху через COG Q перпендикулярно линии АВ. Вертикальная плоскость, проходящая через линию DF, является плоскостью, в которой перемещается COG при наклоне машины на платформе, при линии АВ, параллельной оси вращения платформы;
c) определяют линию QD на виде сверху, проводя линию из ![]() параллельно линии АВ, и определяют положение точки D на этой линии;
параллельно линии АВ, и определяют положение точки D на этой линии;
d) определяют линию AD на виде, перпендикулярном линии АВ, проводя линию через точку D параллельно линии DF на виде сверху (линия, отображающая опорную поверхность);
e) определяют точку QD на виде, перпендикулярном линии АВ, проводя линию параллельно линии АВ через точку D длиной, равной высоте z расположения COG;
f) поворачивают линию AQ и определяют ее точку пересечения F с линией АВ;
g) угол ![]() является углом статического опрокидывания SOA и равен соотношению DA/QD, %.
является углом статического опрокидывания SOA и равен соотношению DA/QD, %.
|
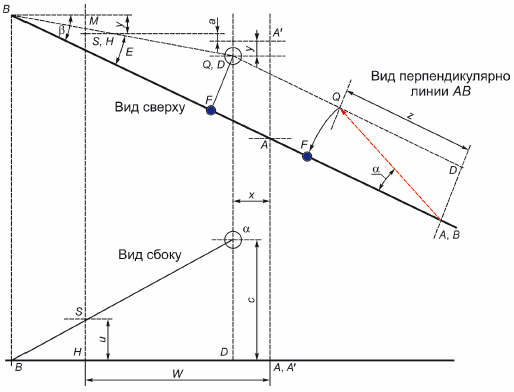
Рисунок 7 - Графическое определение угла статического опрокидывания SOA
5.2.3 Определение устойчивости расчетным методом
SOA может быть определен по формулам, приведенным в таблице 7, и по рисунку 7.
Таблица 6 - Значения, необходимые для расчета угла статического опрокидывания
Описание | Обозначение | Единица измерения |
Колесная база |
| мм |
Высота точки вращения качающейся оси | мм | |
Общая ширина по шинам на фиксированной оси | мм | |
Ширина шин на фиксированной оси |
| мм |
Общая ширина по шинам на качающейся оси |
| мм |
Ширина шин на качающейся оси |
| мм |
Максимальный угол отклонения качающейся оси от горизонтали |
| ° |
Продольное расположение COG (относительно фиксированной оси) | мм | |
Поперечное расположение COG (положительные значения вправо) | мм | |
Высота расположения COG | мм | |
Смещение точки вращения качающейся оси (для упрощения в дальнейших примерах a=0) | a=0 | мм |
Таблица 7 - Расчеты угла статического опрокидывания
Описание | Обозначение | Единица измерения | Расчет |
Расстояние от внутренней кромки шины колеса фиксированной оси до линии опрокидывания | мм |
| |
Расстояние от внутренней кромки шины колеса качающейся оси до линии опрокидывания | мм |
| |
Базовая линия треугольника устойчивости |
| мм |
|
Расстояние на виде сбоку между точкой В и вертикальной проекцией точки вращения качающейся оси |
| мм |
|
См. рисунок 7 |
| мм |
|
См. рисунок 7 |
| мм |
|
Худший случай угла устойчивости при опрокидывании |
| мм |
|
См. рисунок 7 |
| мм |
|
Расстояние между точкой В и вертикальной проекцией COG |
| мм |
|
Угол, образованный сторонами АВ и ВМ |
| ° |
|
См. рисунок 7 | ° |
| |
См. рисунок 7 | ° |
| |
Кратчайшее расстояние между вертикальной проекцией COG и стороной АВ |
| мм |
|
Угол статического опрокидывания без устройства ограничения наклона качающейся оси |
| о |
|
Угол статического опрокидывания без устройства ограничения наклона качающейся оси |
| % |
|
5.3 Боковое опрокидывание: машины с одной зафиксированной осью и одной качающейся осью с устройством ограничения наклона оси
Большинство самоходных машин оснащены устройством ограничения угла наклона качающейся оси, которое при боковом опрокидывании ограничивает наклон качающейся оси до полного опрокидывания машины. Колесо на фиксированной оси, расположенное напротив линии АВ (см. рисунок 6), теряет контакт с опорной поверхностью и поднимается вверх. Корпус машины поворачивается вокруг линии AS и останавливается при срабатывании устройства ограничения угла качающейся оси. В этой точке линия устойчивости образована точками контакта с опорной поверхностью переднего и заднего колеса. Устройства ограничения угла наклона качающейся оси эффективны только в случае, если угол наклона качающейся оси удерживает вертикальную проекцию COG в пределах зоны, ограниченной линией устойчивости, образованной шинами, для обеспечения поглощения динамических эффектов при опрокидывании вокруг линии AS.
В приведенном далее примере заложен запас устойчивости 1,25, устройство ограничения наклона качающейся оси должно срабатывать при менее чем 80% от линии устойчивости, образованной шинами, иначе SOA равен ![]() . На рисунке 8 упрощенно приведено расположение углов
. На рисунке 8 упрощенно приведено расположение углов ![]() ,
, и
![]() (все углы указаны в одной поперечной плоскости).
(все углы указаны в одной поперечной плоскости).
Примечание - В следующей редакции настоящего стандарта планируется ввести более точный метод с трехмерным отображением углов в соответствующих плоскостях.
|
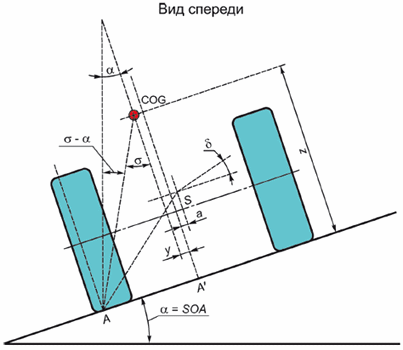
Рисунок 8 - Смещение центра тяжести при опрокидывании вокруг линии AS
(двухмерное отображение)
Таблица 8 - Расчеты угла статического опрокидывания (значение )
Описание | Обозначение | Единица измерения | Расчет |
Разница ширины колеи передней и задней оси |
| мм |
|
Угол статического опрокидывания вокруг оси опрокидывания, образованной шинами | % |
| |
Угол статического опрокидывания вокруг оси опрокидывания, образованной шинами | ° |
| |
Запас устойчивости, ° |
| ° |
|
Запас устойчивости, % |
| % |
|
![]() : SOA=
: SOA=; (4)
![]() : SOA=
: SOA=![]() . (5)
. (5)
Если разница ![]() более или равна 1,25 угла наклона качающейся оси, в качестве SOA используется
более или равна 1,25 угла наклона качающейся оси, в качестве SOA используется , иначе - используется
![]() .
.
Примечание 2 - Значение 1,25 приведено для справки и должно быть оценено для каждой модели машины.
5.4 Боковое опрокидывание: машины без качающихся осей
5.4.1 Гусеничные машины
Треугольник устойчивости не применяется для гусеничных машин, т.к. линия опрокидывания проходит через кромку гусеницы. В этом случае угол статического опрокидывания, %, является соотношением между боковым смещением центра тяжести ![]() и высотой расположения центра тяжести
и высотой расположения центра тяжести . Машина достигает и превышает угол статического опрокидывания в том положении, когда вертикальная проекция центра тяжести выходит за пределы линии опрокидывания:
![]() , (6)
, (6)
где для металлических гусениц - внешняя кромка гусеницы и
для резиновых гусеничных лент - внешняя кромка опорных катков.
5.4.2 Машины с устройствами для блокировки качающихся осей или для изменения треугольника устойчивости
Машины могут быть оборудованы устройствами для изменения треугольника устойчивости в зависимости от уклона. Такие устройства положительно влияют на угол статического опрокидывания. При определении угла статического опрокидывания должно быть учтено влияние таких устройств в зависимости от типа примененного устройства, и значение может быть использовано в качестве SOA (см. 5.3).
5.4.3 Машины с независимой подвеской колес
Для машин с независимой подвеской колес применяют положения 5.7.
5.5 Сваливание вперед и назад
5.5.1 Сваливание вперед
Машина сваливается вперед, когда вертикальная проекция центра тяжести пересекает линию между точками контакта передних колес с опорной поверхностью. В этом случае SOA, %, является отношением между горизонтальным расположением центра тяжести и высотой центра тяжести
:
![]() . (7)
. (7)
5.5.2 Сваливание назад
Машина сваливается назад, когда вертикальная проекция центра тяжести пересекает линию между точками контакта задних колес с опорной поверхностью. В этом случае SOA, %, является отношением между горизонтальным расположением центра тяжести ![]() и высотой центра тяжести
и высотой центра тяжести :
![]() . (8)
. (8)
5.6 Системы изменения угла наклона корпуса
Если машина оборудована системой изменения угла наклона корпуса, включаемой вручную или автоматически, возможности этой системы (максимальный угол наклона корпуса, %) в определенном направлении должны учитываться при определении угла статического опрокидывания.
Примечание 1 - В следующей редакции настоящего стандарта планируется ввести более точный метод определения угла статического опрокидывания для машин с регулировкой угла наклона корпуса.
Примечание 2 - В настоящем стандарте не рассматривается надежность системы управления регулировкой угла наклона корпуса.
5.7 Альтернативные методы
5.7.1 При отсутствии достаточного количества достоверных исходных данных или при наличии соответствующего оборудования для определения угла статической устойчивости могут быть использованы другие методы, например:
- машину поднимают поочередно домкратами с каждой стороны до угла, равного углу опрокидывания;
- машину размещают на наклоняемой платформе и поочередно наклоняют во все четыре стороны до угла, равного углу опрокидывания;
- проводят виртуальную симуляцию.
5.7.2 Испытание прекращают при достижении угла статического опрокидывания (в момент начала сваливания) или при достижении угла, эквивалентного уклону 100%.
6 Сравнение угла статического опрокидывания и установленного угла статической устойчивости
6.1 Установленный угол статической устойчивости RSSA должен быть определен для каждого типа машин.
Установленный угол статической устойчивости указывает уклон, на котором машина должна сохранять устойчивость. Установленный угол статической устойчивости определяют, используя максимальный рабочий уклон MOS и коэффициент безопасности SF по таблице С.1 приложения С. Описание коэффициента безопасности приведено в приложении D.
![]() . (9)
. (9)
6.2 Сравнивают значения угла статического опрокидывания и установленного угла статической устойчивости. Если угол статического опрокидывания более установленного угла статической устойчивости, риски опрокидывания или сваливания машины малы и установка устройств защиты при опрокидывании не требуется.
6.3 Рабочее место оператора машин с системой изменения угла наклона корпуса должно быть оборудовано следующим:
- звуковым или визуальным устройством, сигнализирующим оператору о движении машины по продольному или поперечному уклону, превышающему 80% максимального рабочего уклона. Предупреждающий сигнал должен включаться при достижении или превышении указанного значения уклона на 3 с;
- устройством, постоянно отображающим значение уклона.
Приложение А
(справочное)
Пример расчета центра тяжести (см. раздел 4)
Таблица А.1 - Расчет положения центра тяжести
Исходные значения. | Точность весов | ||||
10 | кг | ||||
Обозначение | Значение | Единица измерения | Расчет | Значе- | Значе- |
| 860 | мм | 860 | 860 | |
650 | мм | 650 | 650 | ||
| 3200 | мм | 3200 | 3200 | |
| 4400 | Н | 4410 | 4390 | |
| 4700 | Н | 4710 | 4690 | |
| 6100 | Н | 6110 | 6090 | |
| 10011,5 | Н | 10002 | 10022 | |
1000 | мм | 1000 | 1000 | ||
3300 | мм | 3300 | 3300 | ||
| 800 | мм | 800 | 800 | |
a | 0 | мм | 0 | 0 | |
2500 | мм |
| 2500 | 2500 | |
| 15200 | Н |
| 15230 | 15170 |
25 | мм |
| 25 | 25 | |
| 1916 | мм |
| 1916 | 1915 |
1284 | мм |
| 1284 | 1285 | |
| 3207 | мм |
| 3207 | 3207 |
| 3108 | мм |
| 3108 | 3108 |
| 3,75 | ° |
| 3,75 | 3,75 |
| 14,26 | ° |
| 14,26 | 14,26 |
| 18,0 | ° |
| 18,0 | 18,0 |
2047 | мм |
| 2041 | 2053 | |
| 7269 | мм |
| 7249 | 7289 |
1378 | мм |
| 1357 | 1399 | |
мм | Погрешность, мм: 42 | ||||
% | Погрешность, %: 1,5 | ||||
Приложение В
(справочное)
Пример расчета угла статического опрокидывания (см. раздел 5)
Исходные значения
Обозначение | Значение | Единица измерения |
| 3200 | мм |
600 | мм | |
3300 | мм | |
| 800 | мм |
| 3000 | мм |
| 500 | мм |
| 15 | ° |
1284 | мм | |
25 | мм | |
1800 | мм | |
a | 0 | мм |
Расчеты угла ![]() при расположении машины на наклоняемой платформе
при расположении машины на наклоняемой платформе
Обозначение | Значение | Единица измерения | Расчет |
600 | мм |
| |
375 | мм |
| |
| 1450 | мм |
|
| 958 | мм |
|
| 13 | мм |
|
| 958 | мм |
|
| 4408 | мм |
|
| 1916 | мм |
|
| 2874 | мм |
|
| 19,4 | ° |
|
0,75 | ° |
| |
18,6 | ° |
| |
| 918 | мм |
|
| 27,0 | ° |
|
| 51,0 | % |
|
Расчеты угла ![]() (при опрокидывании вокруг линии, образованной шинами)
(при опрокидывании вокруг линии, образованной шинами)
Обозначение | Значение | Единица измерения | Расчет |
| 75 | мм |
|
37,8 | % |
| |
77,5 | ° |
| |
| 10,7 | ° |
|
| 26,5 | % |
|
| 15,0 | ° |
|
| 26,8 | % |
|
Приложение С
(обязательное)
Расчет установленного угла статической устойчивости
Для расчета установленного угла статической устойчивости по таблице С.1 машина должна быть оснащена, настроена для работы и оценена нагруженной или ненагруженной в зависимости от того, при каком состоянии центр тяжести расположен наиболее высоко, в любых рабочих конфигурациях.
Примечание - В следующей редакции настоящего стандарта планируется установить значения для других видов самоходных сельскохозяйственных машин.
Таблица С.1 - Максимальный рабочий уклон MOS, коэффициент безопасности SF и установленный угол статической устойчивости RSSA для самоходных сельскохозяйственных машин
Вид машины | Боковое опрокидывание или сваливание | Опрокидывание или сваливание вперед или назад | ||||
MOS, % | SF | RSSA, % | MOS, % | SF | RSSA, % | |
Комбайны без системы компенсации уклона | 12 | 1,5 | 18 | 18 | 1,5 | 27 |
Комбайны с системой компенсации уклона | 20 | 1,5 | 30 | 20 | 1,5 | 30 |
Комбайны с системой изменения угла наклона корпуса | 30 | 1,5 | 45 | 30 | 1,5 | 45 |
Кормоуборочные комбайны | 25 | 1,5 | 37,5 | 25 | 1,5 | 37,5 |
Опрыскиватели | 15 | 1,5 | 22,5 | 25 | 1,5 | 37,5 |
Машины для уборки корнеплодов (картофеля, моркови, лука) | 10 | 1,5 | 15 | 15 | 1,5 | 22,5 |
Машины для уборки винограда без системы изменения угла наклона корпуса | 20 | 1,5 | 30 | 30 | 1,5 | 45 |
Машины для уборки винограда с системой изменения угла наклона корпуса | 30 | 1,5 | 45 | 30 | 1,5 | 45 |
Хлопкоуборочные машины | 16 | 1,5 | 24 | 16 | 1,5 | 24 |
Машины для уборки сахарной свеклы | 10 | 1,5 | 15 | 30 | 1,5 | 45 |
Косилки-измельчители | 25 | 1,5 | 37,5 | 25 | 1,5 | 37,5 |
Самоходные смесители-кормораздатчики | 30 | 1,5 | 45 | Н .п.* | Н.п.* | Н.п.* |
* Н.п. - не применяется. | ||||||
Приложение D
(справочное)
Влияние динамических эффектов на опрокидывание и сваливание
D.1 Общее
Динамические эффекты могут оказывать существенный отрицательный эффект на опрокидывание и сваливание машины. Отрицательное влияние может быть вызвано скоростью движения, радиусом поворота, ускорением или торможением, свойствами опорной поверхности и смещением груза. Отрицательное влияние динамических эффектов возрастает пропорционально увеличению высоты центра тяжести. Динамические эффекты могут начинаться с неподвижного или почти неподвижного состояния машины.
D.2 Динамические эффекты, создаваемые манерой вождения
Скорость движения, продольное и поперечное ускорения и торможения являются результатом действий оператора и должны быть адаптированы к свойствам опорной поверхности, нагруженности и конфигурации машины. Смещение груза в емкостях или бункерах может ухудшить устойчивость машины.
D.3 Динамические эффекты, создаваемые опорной поверхностью
Препятствия, неожиданные изменения уклона, ямы и неровности могут ухудшить устойчивость машины.
D.4 Динамические эффекты, начинающиеся с неподвижного или почти неподвижного состояния машины
Неожиданная потеря несущей способности опорной поверхности под колесами, гусеницами или выносными опорами может вызвать динамический эффект, способный привести к опрокидыванию или сваливанию машины. Примером такой поверхности могут быть мосты, скрытая вода, промоины или каверны в почве.
D.5 Коэффициент безопасности SF
Коэффициент безопасности SF по разделу 6 учитывает соответствующий запас устойчивости. В связи со сложностью оценки влияния отдельных динамических эффектов на устойчивость машины, коэффициент безопасности для расчетов установленного угла статической устойчивости по таблице С.1 приложения С принимают равным 1,5.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 789-6:1990 | MOD | ГОСТ 30750-2001 (ИСО 789-6:82) "Тракторы сельскохозяйственные. Определение положения центра тяжести" |
ISO 16231-1:2013 | IDT | ГОСТ ISO 16231-1-2016 "Машины самоходные сельскохозяйственные. Оценка устойчивости. Часть 1. Основные принципы" |
Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: | ||
УДК 631.3.076:006.354 | МКС 65.060.01 | IDT |
Ключевые слова: машины сельскохозяйственные самоходные, оценка устойчивости, методы испытаний | ||
Редакция документа с учетом
изменений и дополнений подготовлена
{kind=link}