ГОСТ ISO 8082-2-2014
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МАШИНЫ ДЛЯ ЛЕСА САМОХОДНЫЕ
Лабораторные испытания устройств защиты при опрокидывании и эксплуатационные требования к ним
Часть 2
Машины с вращающейся платформой и находящейся на ней кабиной и грузовой стрелой
Self-propelled machinery for forestry. Laboratory tests and performance requirements for roll-over protective structures. Part 2. Machines having a rotating platform with a cab and boom on the platform
МКС 65.060.80
Дата введения 2016-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2009 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Центральный научно-исследовательский и проектно-конструкторский институт механизации и энергетики лесной промышленности" (ОАО "ЦНИИМЭ") на основе собственного аутентичного перевода на русский язык стандарта, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии (Росстандарт)
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 20 октября 2014 г. N 71-П)
За принятие проголосовали:
Краткое наименование страны по MК (ИСО 3166) 004-97 | Код страны по MК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Россия | RU | Росстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 15 июня 2015 г. N 723-ст межгосударственный стандарт ГОСТ ISO 8082-2-2014 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2016 г.
5 Настоящий стандарт идентичен международному стандарту ISO 8082-2:2011* Self-propelled machinery for forestry - Laboratory tests and performance requirements for roll-over protective structures - Part 2: Machines having a rotating platform with a cab and boom on the platform (Машины для леса самоходные. Лабораторные испытания устройств защиты при опрокидывании и эксплуатационные требования к ним. Часть 2. Машины с вращающейся платформой и находящейся на ней кабиной и грузовой стрелой).
________________
* Доступ к международным и зарубежным документам, упомянутым здесь и далее по тексту, можно получить, перейдя по ссылке на сайт . - .
Международный стандарт ISO 8082-2 разработан Техническим комитетом по стандартизации ISO ТС 23 "Тракторы и машины для сельского и лесного хозяйства", Подкомитетом SC 15 "Машины лесного хозяйства" Международной организации по стандартизации (ISO).
Перевод с английского языка (еn).
В разделе "Нормативные ссылки" и тексте стандарта ссылки на международные стандарты актуализированы.
Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам приведены в дополнительном приложении ДА.
Степень соответствия - идентичная (IDТ)
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты" (по состоянию на 1 января текущего года), а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Введение
Введение
ISO 8082 состоит из следующих частей под общим названием "Машины для леса самоходные. Лабораторные испытания устройств защиты при опрокидывании и эксплуатационные требования к ним:
- Часть 1: Машины общего назначения;
- Часть 2: Машины с вращающейся платформой и находящейся на ней кабиной и грузовой стрелой".
Машины для леса с вращающейся платформой и находящейся на ней кабиной и грузовой стрелой подобны землеройным экскаваторам, применяющимся на пересеченной местности, в том числе при работах на участках с деревьями, исключая применение при работах в лесу. Требования к устройствам защиты при опрокидывании (ROPS) и методам их лабораторных испытаний для землеройных экскаваторов установлены международным стандартом ISО 12117-2. Благодаря подобию между экскаваторами и машинами для леса с вращающейся платформой и находящейся на ней кабиной на фиксированном постаменте и грузовой стрелой вторая часть ISO 8082 определяет методы и процедуры испытаний, подобные таковым в ISO 12117-2 и ISO 3471.
1 Область применения
Настоящий стандарт устанавливает последовательные и воспроизводимые методы оценки нагрузочных (несущих) характеристик устройства защиты при опрокидывании (ROPS) самоходных машин для леса при статическом нагружении и устанавливает эксплуатационные требования для типового образца при таком нагружении.
Стандарт применим к машинам, сформированным как машины для леса, как определено международным стандартом ISO 6814, с вращающейся платформой и находящейся на ней кабиной на фиксированном постаменте или без него и грузовой стрелой на той же или отдельной платформе, управляемых оператором, пристегнутым ремнем безопасности.
Стандарт не применим к машинам для леса с подъемными кабинами.
Примечание - Поведение таких машин при опрокидывании требует дополнительных исследований.
2 Нормативные ссылки
Для применения настоящего стандарта необходимы следующие ссылочные стандарты*. Для датированных ссылок применяют только указанное издание ссылочного стандарта:
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 898-1:2013 Mechanical properties of fasteners made of carbon steel and alloy steel - Part 1: Bolts, screws and studs with specified property classes - Coarse thread and fine Pitch thread (Механические свойства крепежных изделий из углеродистой и легированной стали. Часть 1. Болты, винты и шпильки с заданным классом прочности. Крупная и мелкая резьба)
ISO 898-2:2012 Mechanical properties of fasteners made of carbon steel and alloy steel - Part 2: Nuts with specified property classes - Coarse thread and fine pitch thread (Механические свойства крепежных изделий из углеродистой и легированной стали. Часть 2. Гайки с заданным классом прочности. Крупная и мелкая резьба)
ISO 3164:2013 Earth-moving machinery - Laboratory evaluations of protective structures - Specifications for deflection-limiting volume (Машины землеройные. Лабораторные испытания по оценке устройств защиты. Требования к пространству, ограничивающему деформацию)
ISO 3411:2007 Earth-moving machinery. Physical dimensions of operators and minimum operator space envelope (Машины землеройные. Антропометрические данные операторов и минимальное рабочее пространство вокруг оператора)
ISO 5353:1995 Earth-moving machinery, and tractors and machinery for agriculture and forestry - Seat index point (Машины землеройные, тракторы и машины для сельского и лесного хозяйства. Контрольная точка сиденья)
ISO 6814:2009 Machinery for forestry - Mobile and self-propelled machinery - Terms, definitions and classification (Машины для лесного хозяйства. Мобильные и самоходные машины. Термины, определения и классификация)
3 Термины и определения
В настоящем стандарте применяются следующие термины с соответствующими определениями:
3.1 опорная плита (bedplate): Существенно жесткая часть испытательного стенда, к которой крепится испытываемый образец для испытаний.
3.2 граничная плоскость, BP (boundary plane): Плоскость, определяющая вертикальную проекцию спины, бока и колен оператора на объем ограничения деформации (DLV).
Примечание - граничные плоскости используются при определении точки приложения нагрузки.
[ISO 12117-2]
3.3 объем ограничения деформации, DLV (deflection-limiting volume): Фигура с прямоугольными очертаниями, по размерам приблизительно соответствующая антропометрическим данным оператора по ISO 3411 (мужчина высокого роста в положении сидя в обычной одежде и защитном шлеме), определяющая предельно допустимую деформацию.
[ISO 8082-1]
3.4 деформация (отклонение) ROPS (deflection of ROPS): Перемещение ROPS, монтажной системы и части корпуса, измеренное в точке приложения нагрузки, исключая эффект от любого перемещения элементов крепления, относящихся к испытательному стенду.
3.5 подъемная кабина (elevating cab): Дополнительные средства для подъема и опускания кабины относительно вращающейся платформы.
3.6 фиксированный постамент кабины (fixed cab riser): Дополнительный конструктивный элемент, который изменяет положение кабины по высоте относительно вращающейся платформы и который считается структурным элементом ROPS.
3.7 боковая имитируемая наземная плоскость, LSGP (lateral simulated ground plane): Для машины, опрокинувшейся набок, плоскость, повернутая на угол 15 градусов в сторону удаления от DLV, образующаяся при повороте вертикальной плоскости, параллельной продольной оси машины, относительно горизонтальной оси, проходящей через наиболее удаленную точку верхнего элемента ROPS. См. рисунок 1.
Примечание 1 - LSGP определяется для ненагруженного ROPS и перемещается вместе с элементом, к которому приложена нагрузка, сохраняя угол 15 градусов относительно вертикали.
Примечание 2 - Определение по ISO 8082-1.
3.8 установочная ось, LA (locating axis): Горизонтальная ось, определяющая расположение DLV относительно контрольной точки сиденья (SIP).
[ISO 3164]
3.9 точка приложения нагрузки, LAP (load application): Точка на конструкции ROPS, к которой прикладывается испытательная нагрузка (F).
[ISO 12117-2]
3.10 устройство распределения нагрузки, LDD (load distribution device): Устройство, используемое для предотвращения локального проникновения элементов ROPS в точке приложения нагрузки.
[ISO 12117-2]
3.11 масса машины, т (machine mass): Максимальная масса машины, объявленная изготовителем, включая закрепленное технологическое оборудование в рабочем состоянии, инструменты, устройство защиты оператора (ROPS), все заправленные емкости, но исключая прицепное оборудование (например рубительные машины, сеялки, дисковые бороны) и любой груз, который можно было бы перевезти на машине.
[ISO 8082-1]
Рисунок 1 - Определение положения боковой имитируемой наземной плоскости (LSGP)
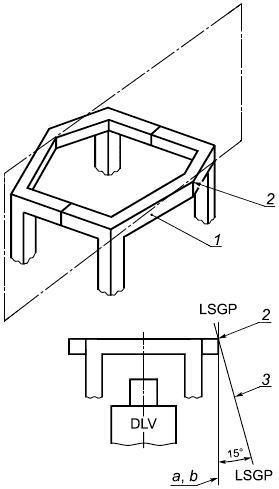
1 - верхний элемент ROPS, к которому прикладывают боковую нагрузку; 2 - наиболее удаленная точка в конструкции ROPS (1); 3 - боковая имитируемая наземная плоскость (LSGP); а - вертикальная линия, проходящая через точку (2); b - вертикальная плоскость, параллельная продольной оси машины, проходящая через линию а
Рисунок 1 - Определение положения боковой имитируемой наземной плоскости (LSGP)
3.12 устройство защиты оператора, OPS (operator protective structure): Система конструктивных элементов, расположенных таким образом, чтобы обеспечить оператору защиту от проникающих предметов (таких, например, как подрост, ветви деревьев, обрывки каната лебедки).
[ISO 8082-1]
3.13 типовой образец (representative specimen): Устройство защиты оператора при опрокидывании (ROPS), монтажное оборудование и вращающаяся платформа машины (полностью или частично), включая элементы, соединяющие ROPS с рамой платформы, используемые для испытаний и изготовленные из материалов в пределах производственных допусков в соответствии с техническими условиями изготовителя.
Примечание 1 - Намерение состоит в том, чтобы все ROPS, изготовленные по этим техническим условиям, должны соответствовать или превышать установленные уровни эксплуатационных характеристик.
Примечание 2 - Использовано из ISO 12117-2:2008, определение 3.17.
3.14 устройство защиты при опрокидывании, ROPS (roll-over protective structure): Система конструктивных элементов, позволяющая при опрокидывании машины уменьшить вероятность нанесения повреждения оператору, пристегнутому ремнем безопасности.
[ISO 8082-1]
Примечание - Эти конструктивные элементы включают подрамники, кронштейны, опоры, подвески или амортизаторы, болты, шпильки, используемые для присоединения системы к вращающейся платформе.
3.15 конструктивный элемент ROPS (ROPS structural member): Элемент, предназначенный для противостояния приложенной нагрузке и/или поглощения энергии.
Примечание 1 - Эти конструктивные элементы могут включать подрамники, кронштейны, опоры, болты, шпильки, подвески или гибкие амортизаторы.
Примечание 2 - Определение по ISO 12117-2 (пункт 3.20).
3.16 соединительная муфта, S (socket): Элемент устройства распределения нагрузки (LDD), воспринимающий сосредоточенную нагрузку.
[ISO 3471]
3.17 вращающаяся платформа (Rotating platform): Структурный элемент (или элементы машины), на котором постоянно закреплено ROPS при нормальной эксплуатации.
Примечание - В соответствии с целями настоящего стандарта все обычные съемные не несущие компоненты, в том числе установленные на болтах, могут быть удалены с вращающейся платформы. Необходимо только, чтобы эта оставшаяся конструкция представляла собой копию той части вращающейся платформы, которая присоединена к верхней части опоры вращения.
3.18 вертикальная проекция DLV (Vertical projection of DLV): Площадь поперечного сечения основания, сформированная вертикальными проекциями наружных углов объема ограничения деформации (DLV) с учетом допускаемой деформации, исключая секцию ног.
Примечание - Определение по ISO 12117-2 (пункт 3.25).
4 Обозначения
U - энергия, поглощаемая конструкцией, зависящая от заявленной изготовителем массы машины т, Дж;
F - усилие нагрузки, Н;
М - масса машины, кг;
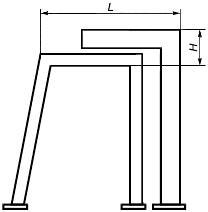
L - длина ROPS, мм:
- для ROPS с консольными несущими нагрузку конструктивными элементами L - продольное расстояние от внешней поверхности стоек ROPS к внешней поверхности наиболее удаленных несущих нагрузку элементов, если возможно в верхней части ROPS. См. рисунки 2 и 7;
- для ROPS без консольных несущих нагрузку конструктивных элементов L - расстояние между передней и задней поверхностями стоек ROPS. Конструктивные элементы ROPS не обязательно должны перекрывать всю вертикальную проекцию DLV;
- для многостоечного ROPS L - наибольшее продольное расстояние от внешней передней части стоек до их внешней задней части. См. рисунок 2;
- для ROPS с изогнутыми структурными элементами L определяется пересечением плоскости А с внешней поверхностью вертикального элемента в Y.
Плоскость А - бисекторная плоскость угла, образованного пересечением плоскостей В и С. В - касательная линия к внешней поверхности, параллельная плоскости D. D - плоскость, пересекающая сопряжения изогнутых элементов ROPS со смежными элементами. С - проекция наивысшего верхнего конструктивного элемента ROPS. См. рисунок 3.
W - ширина ROPS, мм:
- для ROPS с консольными несущими конструктивными элементами W - та часть консольных несущих элементов, которая закрывает по крайней мере вертикальную проекцию ширины DLV, измеренную в верхней части поверхности наружных несущих консольных конструктивных элементов ROPS;
- для всех других ROPS W - наибольшая полная ширина между наружными поверхностями левых и правых стоек ROPS, измеренная в верхней части поверхности наружных несущих консольных конструктивных элементов ROPS;
- для ROPS с изогнутыми структурными элементами W определяется пересечением плоскости А с наружной поверхностью вертикального элемента в Y.
Плоскость А - бисекторная плоскость угла, образованного пересечением плоскостей В и С. В - касательная линия к внешней поверхности, параллельная плоскости D. D - плоскость, пересекающая сопряжения изогнутых элементов ROPS со смежными элементами. С - проекция наивысшего верхнего конструктивного элемента ROPS. См. рисунок 3.
![]() - деформация (отклонение) ROPS, мм;
- деформация (отклонение) ROPS, мм;
Н - высота зоны приложения нагрузки, мм:
- для прямого элемента Н - расстояние от верха до низа конструктивного элемента ROPS, как показано на рисунке 2;
- для изогнутого элемента Н - расстояние от верха элемента на вертикальной плоскости в конце L, где она пересекает внутреннюю поверхность изогнутого элемента в точке Y;
- для конфигурации ROPS, состоящей из отдельных верхних конструктивных элементов, как показано на рисунке 4, каждая конструкция должна быть выполнена из материалов в соответствии с требованиями п.7. Высота Н может включать оба верхних конструктивных элемента, охватывая устройство распределения нагрузки с точкой приложения нагрузки посередине между наружными поверхностями верхних конструктивных элементов.
Рисунок 2 - Приложение боковой нагрузки для четырехстоечного ROPS
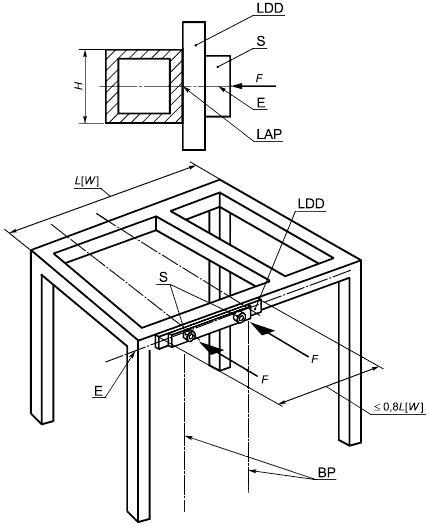
ВР - граничные плоскости DLV; Е - горизонтальная осевая линия верхнего конструктивного элемента ROPS; F - сила нагрузки; LAP - точка приложения нагрузки; LDD - устройство распределения нагрузки; S - соединительная муфта; L[W] - длина [ширина] ROPS
Примечание - Две соединительные муфты на этом рисунке показывают, что для одновременного приложения силы может быть использовано более одной из них.
Рисунок 2 - Приложение боковой нагрузки для четырехстоечного ROPS
Рисунок 3 - Пример изогнутых структурных элементов
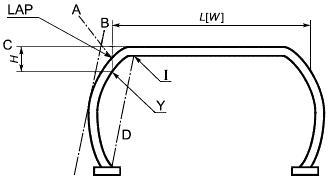
а) Пример измерения L или W и Н для изогнутого конструктивного элемента (изогнутой стойки)
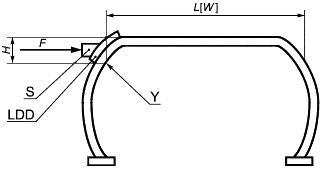
b) Пример изогнутого конструктивного элемента (изогнутой стойки), показывающий приложение нагрузки
А - биссектриса угла между двумя касательными линиями (В и С); В - касательная, параллельная D, к внешней поверхности изогнутого конструктивного элемента ROPS; С - проекция верхней поверхности верхнего конструктивного элемента ROPS; D - прямая, соединяющая концы изогнутого конструктивного элемента ROPS с сопряженными элементами; F - нагружающая сила; I - пересечение изогнутой поверхности с плоской поверхностью; Н - высота зоны приложения нагрузки; LDD - устройство распределения нагрузки; L[W] - длина [ширина] на ROPS для определения установки LAP; S - соединительная муфта; LAP - точка приложения нагрузки; Y - пересечение вертикальной линии LAP с внутренней поверхностью вертикального элемента
Примечание 1 - Угол между А и В равен углу между А и С.
Примечание 2 - Типичное, но не обязательное расположение.
Рисунок 3 - Пример изогнутых структурных элементов
Рисунок 4 - Высота зоны приложения нагрузки для ROPS с отдельными верхними конструктивными элементами
Н - полная высота верхнего конструктивного элемента, используемая для определения высоты LDD; L - длина ROPS для определения точки приложения нагрузки
Рисунок 4 - Высота зоны приложения нагрузки для ROPS с отдельными верхними конструктивными элементами
5 Методы и оборудование испытаний
ПРЕДУПРЕЖДЕНИЕ: некоторые испытания, описанные в настоящем стандарте, предполагают использование методов, которые могут привести к возникновению опасной ситуации.
5.1 Общие положения
Испытания предназначены для определения сопротивляемости конструкции к воздействию силы в боковом и вертикальном направлениях, а также поглощения энергии в боковом и затем в продольном направлениях. Имеются ограничения на отклонения ROPS при боковом, вертикальном и продольном нагружении. Сопротивляемость к воздействию силы и энергии, а также ограничения на деформации (отклонения) выбраны и определены таким образом, чтобы гарантировать, что ROPS обеспечивает сохранность DLV, как определено в ISO 3164, в результате воздействий при опрокидывании.
5.2 Средства измерений
Испытательный стенд должен быть оснащен средствами измерений усилий, прикладываемых к ROPS, и деформаций (отклонений) устройства. Точность измерительных инструментов должна соответствовать таблице 1.
Таблица 1 - Требования к точности инструментов
Измеряемая величина | Погрешность измерения |
Деформация (отклонение) ROPS | ±5% от максимального измеренного значения деформации (отклонения) |
Усилие, приложенное к ROPS | ±5% от максимального измеренного значения силы |
|
5.3 Оборудование для испытаний
Оборудование должно обеспечивать надежное крепление типового образца к опорной плите для применения требуемых боковых, продольных и вертикальных нагрузок в соответствии с формулами, приведенными в таблице 3.
5.4 Система ROPS/вращающаяся платформа и крепление к опорной плите
5.4.1 ROPS должен быть присоединен к вращающейся платформе машины или к корпусу так же, как на эксплуатируемой машине. Полнокомплектная машина или вращающаяся платформа для оценки не требуются. Однако вращающаяся платформа машины или ее корпус и установленный для испытаний образец ROPS должны соответствовать действующей машине. В случае нескольких вращающихся конструктивных элементов самые нижние элементы вращения должны быть включены в испытания. Все штатные съемные окна, панели, двери и другие не несущие элементы должны быть удалены, чтобы не влияли на оценку.
Система ROPS/вращающаяся платформа должна быть закреплена на опорной плите стенда (рисунок 5) таким образом, чтобы элементы, соединяющие систему и опорную плиту, имели минимальную деформацию в процессе испытаний.
Не несущие элементы ROPS (поликарбонатные окна, OPS и т.п.), но конструктивно связанные и способные оказывать влияние на функционирование конструкции ROPS, могут быть включены в испытание.
5.4.2 Система должна быть установлена таким образом, чтобы любой элемент машины, который можно было бы рассматривать как подвеску (включающий пневматические, пневмогидравлические, резиновые или механические упругие элементы), должен быть фактически устранен, как поглотитель энергии.
Однако элементы подвески или амортизаторы, являющиеся частью конструкции ROPS, не должны быть изменены.
5.4.3 В процессе бокового нагружения испытываемый образец не должен иметь никакой дополнительной опоры с опорной плитой стенда, кроме первоначального крепления.
Рисунок 5 - Схема закрепления вращающейся платформы на опорной плите
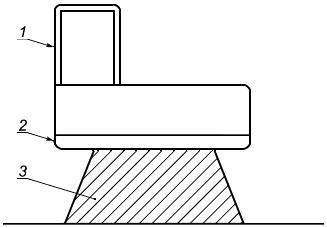
1 - ROPS;
2 - вращающаяся платформа; 3 - опорная плита
Рисунок 5 - Схема закрепления вращающейся платформы на опорной плите
5.4.4 В процессе испытаний любые элементы подвески машины должны быть заблокированы, чтобы они не влияли на отклонение испытываемого образца при нагружении. Элементы крепления ROPS к вращающейся платформе, передающие нагрузку, должны быть на своем месте и рассматриваться как конструктивные элементы ROPS.
5.4.5 Если кабина снабжена функцией наклона, то при приложении испытательной нагрузки кабина должна находиться в нормальном рабочем положении для эксплуатации в лесу. Если механизм наклона предназначен для передачи усилия в процессе эксплуатации, то он должен считаться частью типового образца. Механизмы наклона, соединяющие ROPS с конструкцией вращающейся платформы в процессе нормальной эксплуатации, должны считаться частью испытываемого образца. Механизмы наклона, которые используются для обслуживания или при транспортировке и фиксируются в исходном положении в процессе рабочей эксплуатации, не требуют, чтобы их устройства были включены как части испытываемого образца.
6 Методика нагружения при испытаниях
6.1 Общие требования
6.1.1 Испытания нагружением должны проводиться в следующей последовательности:
a) боковое нагружение энергией и силой,
b) вертикальное нагружение силой,
c) продольное нагружение энергией.
6.1.2 Все испытания, указанные в таблице 3, должны быть проведены на одном и том же типовом образце. Если по какой-либо причине нагружение приостановлено и затем возобновлено, то после достижения максимальной деформации (отклонения) только дополнительная энергия должна быть суммирована с энергией первого нагружения.
6.1.3 DLV и его расположение должны соответствовать ISO 3164. DLV должно быть жестко зафиксировано на том же месте машины, к которому прикрепляется сиденье оператора и должно находиться там в течение всего времени испытаний. Для машин, оборудованных реверсивным сиденьем, DLV определяется как сумма DLV для двух положений сиденья.
6.1.4 Все точки приложения нагрузки (LAP) должны быть определены и промаркированы на конструкции перед приложением нагрузки. Никакой ремонт или исправления любого элемента ROPS/машина не должны выполняться в процессе испытаний или между стадиями нагружения. LDD может использоваться для того, чтобы предотвратить местное проникновение. LDD не должен препятствовать вращению ROPS.
Примечание - Рисунки, на которые имеются ссылки в следующих подпунктах, иллюстративны и не ограничивают конструкцию нагружающих устройств.
6.1.5 Для ROPS с числом стоек более двух LDD не должно распределять нагрузку на длине более чем 80% длины L. На рисунке 3 показано определение L для изогнутых поверхностей.
6.1.6 Высота LDD должна быть такой, как определено на рисунках 2, 3 и 4 для верхних структурных элементов ROPS. LDD должно быть сформировано таким образом, чтобы войти в контакт с контуром секций ROPS на участке приложения нагрузки.
6.1.7 Для конструкции ROPS с одной или двумя стойками расположение точки приложения нагрузки зависит от длины L и вертикальных проекций передней и задней плоскостей DLV. Точка приложения нагрузки не должна быть расположена в пределах L/3 и конструкции ROPS. Если точка L/3 оказывается между вертикальной проекцией DLV и конструкцией ROPS, то точка приложения нагрузки должна быть смещена от конструкции, пока не попадет в пределы вертикальной проекции DLV (см. рисунок 2).
6.1.8 Для ROPS с числом стоек более двух LAP должна быть расположена между вертикальными проекциями передних и задних граничных поверхностей DLV (см. рисунок 2).
6.1.9 Если сиденье оператора смещено относительно продольной оси машины или вращающейся платформы, то нагрузку следует прилагать с внешней стороны, наиболее близкой к сиденью. Если установка ROPS такова, что деформации при нагружении с левой и с правой стороны будут различными, то сторона нагружения должна быть той, которая соответствует наиболее жестким требованиям к типовому образцу.
6.1.10 Если сиденье оператора расположено на продольной оси машины, а деформация конструкции ROPS при нагружении с левой и с правой стороны будет различной, то сторона нагружения должна быть той, которая соответствует наиболее жестким требованиям к системе ROPS/машина.
6.1.11 Первоначальное направление приложенной силы должно быть горизонтальным и перпендикулярным к вертикальной плоскости, проходящей через продольную центральную ось машины или вращающейся платформы. При дальнейшем действии нагрузки деформация в системе ROPS/вращающаяся платформа машины может вызвать изменение направления действия нагрузки, что является допустимым.
6.1.12 Скорость деформации (приложения нагрузки) должна быть такой, чтобы нагружение считалось статическим, т.е. менее 5 мм/с. Когда деформация (отклонение) в точке приложения усилия достигнет 15 мм, значения усилия и деформации должны быть записаны и отмечены на графике. Нагружение продолжается до тех пор, пока не будут достигнуты требуемые значения усилия и энергии. Площадь под кривой деформации (отклонения) под действием силы на графике (см. рисунок 6) соответствует энергии нагружения. Значения деформаций (отклонений), используемые при вычислениях энергии, должны быть деформациями ROPS по линии действия силы. Никакие деформации элементов нагрузочного устройства не должны учитываться при измерении отклонений, используемых при вычислениях энергии.
Рисунок 6 - График "деформация - усилие" при боковом нагружении
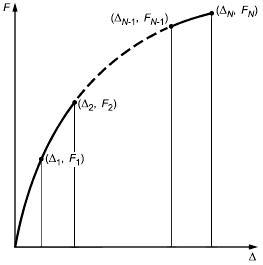
F - сила; ![]() - деформация (отклонение); U - энергия
- деформация (отклонение); U - энергия![]() .
.
Примечание - Размерность величин в формуле для расчета поглощаемой энергии: сила F в ньютонах, деформация ![]() в метрах, поглощаемая энергия U в джоулях.
в метрах, поглощаемая энергия U в джоулях.
Рисунок 6 - График "деформация - усилие" при боковом нагружении
6.2 Боковое нагружение
6.2.1 Для определения характеристик сила - деформация боковая нагрузка должна прикладываться к верхним конструктивным элементам ROPS.
6.2.2 Если ROPS смещено от продольной центральной оси вращающейся платформы машины, то боковая нагрузка должна прикладываться с внешней стороны, наиболее удаленной от оборудования и крепления вращающейся платформы машины. Если это требование находится в противоречии с таковым по п.6.1.9, то должны использоваться самые жесткие требования, чтобы оценить защиту оператора, то есть не ставить под угрозу DLV.
6.3 Вертикальное нагружение
6.3.1 После завершения бокового нагружения к верхней части ROPS прикладывается вертикальная нагрузка с использованием бруса шириной 250 мм.
6.3.2 Для всех ROPS центр вертикальной нагрузки должен прикладываться в той же вертикальной плоскости, перпендикулярной к продольной центральной осевой линии ROPS (см. 6.1.7 и 6.1.8), к которой прикладывалась боковая нагрузка, определенная на конструкции до деформации.
6.3.3 Нагрузка на ROPS может прикладываться без ограничений на характер распределения, если она приложена симметрично относительно продольной центральной линии деформированной ROPS. На рисунке 7 показан пример приложения вертикальной нагрузки.
Рисунок 7 - Вертикальное нагружение
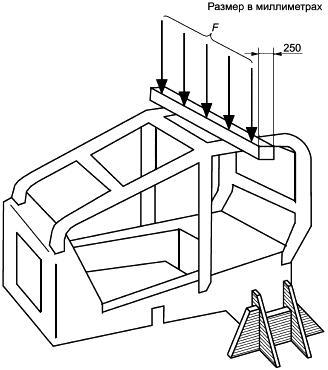
Рисунок 7 - Вертикальное нагружение
6.3.4 Скорость деформации должна быть такой, чтобы нагружение могло считаться статическим (см. 6.1.12). Нагружение продолжается до тех пор, пока требуемое усилие, указанное в таблице 3, не будет достигнуто. Конструкция должна выдержать эту нагрузку в течение 5 мин или пока прекратится любая деформация, в зависимости от того, что наступит раньше.
6.4 Продольное нагружение
6.4.1 После снятия вертикальной нагрузки продольная нагрузка должна прикладываться к верхнему конструктивному элементу ROPS вдоль продольной центральной оси ROPS. Эта продольная нагрузка прикладывается к деформированному ROPS, поскольку боковое и вертикальное нагружения, вероятно, закончатся с остаточными деформациями конструкции. Первоначальное положение точки приложения продольной нагрузки определяется заранее положением распределителя нагрузки и места приложения нагрузки до начала проведения всех испытаний.
6.4.2 Продольная нагрузка должна прикладываться в месте, согласованном с приложением боковой нагрузки, как показано на рисунке 2, и установленном до бокового нагружения. Устройство распределения нагрузки (LDD) может прикладываться на всю ширину, если нет задних и передних поперечных элементов. Во всех других случаях LDD не должно распределять нагрузку на длине более 80% ширины W ROPS (см. рисунок 8). Распределитель нагрузки не должен влиять на прочность любого ROPS с прямыми или изогнутыми элементами.
Рисунок 8 - Устройство распределения продольной нагрузки
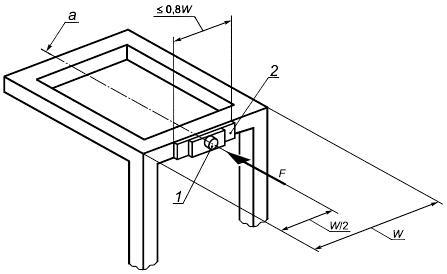
1 - точка приложения нагрузки; 2 - распределитель нагрузки; W - ширина ROPS; а - параллельно продольной оси машины
Рисунок 8 - Устройство распределения продольной нагрузки
6.4.3 Направление нагрузки (спереди машины или сзади) должно быть выбрано таким образом, чтобы отвечать самым жестким требованиям к типовому образцу. Первоначальное направление нагрузки должно быть горизонтальным, параллельным исходной продольной центральной оси машины. Дополнительные факторы, которые должны быть рассмотрены для принятия решения, в каком направлении прикладывать продольную нагрузку, следующие:
a) расположение ROPS относительно DLV и эффект, который продольная деформация имела бы для защиты оператора при аварии;
b) особенности машины, которые могут ограничивать направление продольного компонента нагрузки на ROPS (например, другие конструктивные элементы машины, которые могут препятствовать продольному отклонению ROPS);
c) опыт, который может указывать на возможность продольного опрокидывания или на тенденцию определенного вида машин к вращению относительно продольной оси в течение фактического опрокидывания.
6.4.4 Скорость деформации должна быть такой, чтобы нагружение могло считаться статическим (см. 6.1.12). Нагружение должно продолжаться до тех пор, пока не будет достигнут требуемый уровень продольной энергии.
7 Требования к температуре и материалам
7.1 В дополнение к требованиям по нагрузке имеются требования к температуре и материалам, обеспечивающим гарантию того, что ROPS будет противостоять хрупкому разрушению. Одно из двух альтернативных необходимых условий должно быть выполнено, чтобы выполнялись требования к материалам и температуре.
Требования могут быть выполнены, если боковое, вертикальное и продольное нагружения производятся при температуре минус 18°С или ниже.
Альтернативно требования могут быть выполнены при нагружении при более высоких температурах, если типовой образец отвечает требованиям к механической прочности по 7.2 и 7.4.
7.2 Болты и гайки, используемые для крепления ROPS к вращающейся платформе машины и для соединения конструктивных частей ROPS между собой, должны иметь:
- класс прочности 8.8, 9.8 или 10.9 для болтов в соответствии с ISO 898-1;
- класс прочности 8, 9 или 10 для гаек в соответствии с ISO 898-2.
Примечание 1 - В тех странах, где используется дюймовая система, важно, чтобы применялись болты и гайки эквивалентных сортаментов.
Примечание 2 - При использовании болтов класса прочности выше 10.9 и гаек класса прочности выше 10 требуется тщательная проверка качества во избежание поломки и усталостного разрушения.
7.3 Образцы конструктивных элементов должны быть "продольными" и должны быть взяты из полосового, трубчатого или фасонного проката до его формирования или сварки для использования в конструкции ROPS. Образцы, взятые из трубчатого или фасонного проката, должны браться из середины наибольшей стороны и не должны включать сварных швов (ISO 148-1).
7.4 Тонкостенная сталь должна отвечать требованиям по методу Шарпи, приведенным в таблице 2, если сталь соответствует следующим спецификациям:
a) для стали с толщиной листа менее 2,5 мм, имеющей максимальное содержание углерода 0,2%;
b) для спокойных мелкозернистых сталей с толщиной листа от 2,5 до 4,0 мм, имеющих максимальное содержание углерода 0,2%.
Таблица 2 - Минимальная прочность на удар по методу Шарпи для образцов с V-образным надрезом
Размер образца, мм | Энергия, Дж | |
минус 30°С | минус 20°С | |
10х10 | 11 | 27,5 |
10x9 | 10 | 25 |
10x8 | 9,5 | 24 |
10х7,5 | 9,5 | 24 |
10x7 | 9 | 22,5 |
10х6,7 | 8,5 | 21 |
10х6 | 8 | 20 |
10х5 | 7,5 | 19 |
10х4 | 7 | 17,5 |
10х3,3 | 6 | 15 |
10x3 | 6 | 15 |
10х2,5 | 5,5 | 14 |
|
8 Эксплуатационные требования
8.1 Установленные величины энергии и усилия при боковом нагружении, вертикальное усилие и энергия при продольном нагружении должны быть достигнуты или превышены при испытаниях одного типового образца. Требования для определения показателей, которые должны быть достигнуты для машин с кабинами на фиксированном постаменте или без него, приведены в таблице 3.
Требуемые значения усилия и энергии при боковом нагружении не должны быть достигнуты одновременно. Возможно значительное превышение одного относительно другого. Если усилие достигнуто раньше, чем энергия, то усилие может быть уменьшено, но должно быть снова увеличено до необходимого уровня, когда требуемое значение энергии при боковом нагружении будет достигнуто или превышено.
Таблица 3 - Эксплуатационные требования для определения характеристик энергии и усилий
Показатели эксплуатационных требований | Формулы расчета энергии и усилия |
Энергия при боковом нагружении, U | 13000(т/10000) |
Усилие при боковом нагружении, F | 50000(т/10000) |
Усилие при вертикальном нагружении, F | 19,61т |
Энергия при продольном нагружении, U | 4300(т/10000) |
8.2 Ограничения на деформации (отклонения) обязательны; никакая часть ROPS не должна войти в верхнюю часть DLV выше горизонтальной оси LA расположения DLV в течение всего времени испытаний типового образца при боковом, вертикальном и продольном нагружениях. Наклон DLV допускается, как описано далее, для боковой и продольной нагрузки.
8.3 В процессе бокового нагружения допускается поворот верхней части DLV вбок до 15° относительно контрольной точки сиденья, как определено в ISO 5353. Поперечное вращение должно быть ограничено углом меньшим 15°, если мешают какие-либо компоненты машины или управления при меньшем угле (см. рисунок 9). Дополнительный поворот верхней части DLV из-за деформации настила, на котором установлено DLV, допускается.
Рисунок 9 - Наклон верхней части DLV при боковом нагружении
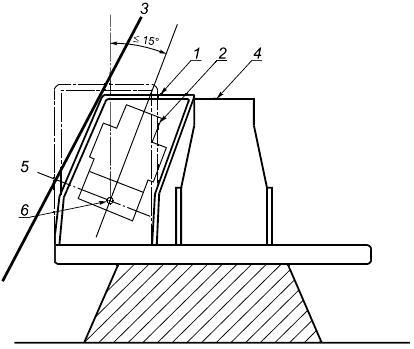
1 - ROPS;
2 - DLV;
3 - LSGP;
4 - жесткие части машины; 5 - LA; 6 - SIP
Рисунок 9 - Наклон верхней части DLV при боковом нагружении
8.4 В процессе вертикального нагружения не допускается никакое наклонное или поперечное вращение DLV. Никакая часть ROPS не должна войти в верхнюю часть DLV выше положения оси LA в течение всего времени испытания при вертикальном нагружении.
8.5 В процессе продольного нагружения допускается наклон верхней части DLV вперед до 15° относительно контрольной точки сиденья, как определено в ISO 5353. Наклон вперед должен быть ограничен углом меньшим 15°, если мешают какие-либо компоненты машины или управления при меньшем угле (см. рисунок 10).
Рисунок 10 - Наклон DLV вперед при продольном нагружении сзади
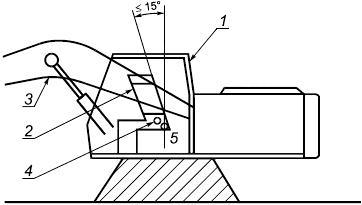
1 - ROPS;
2 - DLV;
3 - жесткие части машины; 4 - SIP; 5 - LA
Рисунок 10 - Наклон DLV вперед при продольном нагружении сзади
8.6 ROPS не должно отрываться от вращающейся платформы машины из-за разрушения ROPS, системы его крепления или вращающейся платформы машины. В случае частичного разрушения ROPS должно обладать способностью предотвращения полного отделения от вращающейся платформы машины при требуемых уровнях усилий и энергии в соответствии с таблицей 3.
8.7 Машины с кабинами, установленными на фиксированном постаменте, и имеющие механизм наклона кабины, например для снижения общей транспортной высоты машины, должны быть испытаны в положении, принятом для эксплуатации в лесу.
9 Маркировка ROPS
9.1 Общие положения
ROPS, отвечающее требованиям настоящего стандарта, должно быть промаркировано в соответствии с этим разделом.
9.2 Требования к этикетке
Этикетка должна быть постоянного типа и должна быть постоянно закреплена на конструкции ROPS таким образом, чтобы ее можно было легко прочитать с земли, с сиденья оператора или с площадки доступа, и защищена от стирания от воздействий погоды.
9.3 Содержание этикетки
На этикетке должно быть указано следующее:
a) зарегистрированное наименование фирмы и адрес изготовителя ROPS и, где применимо, адрес уполномоченного представителя изготовителя;
b) обозначение ROPS/тип машин, для которых предназначен ROPS;
c) обязательная маркировка, если требуется в соответствии с региональными требованиями;
d) обозначение серии или типа/модели машин, для которых предназначено ROPS;
e) серийный номер, если имеется;
f) масса машины m, при которой конструкция ROPS отвечает всем требованиям настоящего стандарта;
g) международные стандарты, для которых конструкция отвечает всем требованиям;
h) другая информация, которую изготовитель считает необходимой (например, по установке, ремонту или информация по замене).
10 Отчетность по результатам испытаний
Результаты испытаний должны быть представлены в протоколе испытаний и содержать всю необходимую информацию, указанную в приложении А.
Представление протокола и его оформление могут отличаться от приведенных в приложении А.
Приложение А (обязательное). Протокол испытаний по ГОСТ ISO 8082-2
Приложение А
(обязательное)
Идентификация машины | |||||||||||||||||
Тип: | |||||||||||||||||
Изготовитель: | |||||||||||||||||
Модель: | |||||||||||||||||
Серийный номер (если имеется): | |||||||||||||||||
Номер вращающейся части машины (если имеется): | |||||||||||||||||
Высота фиксированного постамента, мм | |||||||||||||||||
Идентификация ROPS | |||||||||||||||||
Изготовитель (если отличен от изготовителя машины): | |||||||||||||||||
Тип и модель: | |||||||||||||||||
Серийный номер (если имеется): | |||||||||||||||||
Номер ROPS в каталоге изготовителя (если имеется): | |||||||||||||||||
Информация, представляемая изготовителем | |||||||||||||||||
Максимальная рекомендуемая масса для применяемых элементов ROPS, кг | |||||||||||||||||
Расположение DLV: | |||||||||||||||||
Критерии | |||||||||||||||||
Боковая нагрузка, Н | |||||||||||||||||
Энергия при боковом нагружении, Дж | |||||||||||||||||
Вертикальная нагрузка, Н | |||||||||||||||||
Продольная энергия нагружения, Дж | |||||||||||||||||
Результаты испытаний | |||||||||||||||||
Следующие значения усилий и энергии были достигнуты или превышены без проникновения структурных элементов ROPS в часть DLV выше LA. | |||||||||||||||||
Боковое нагружение | |||||||||||||||||
Максимальное усилие, которое было получено после достижения или превышения требуемого значения энергии, Н: | |||||||||||||||||
Достигнутая поглощенная энергия, Дж | |||||||||||||||||
Вертикальное нагружение | |||||||||||||||||
Максимальное достигнутое усилие, Н | |||||||||||||||||
Продольное нагружение | |||||||||||||||||
Достигнутая поглощенная энергия, Дж | |||||||||||||||||
Температура и материалы | |||||||||||||||||
Испытание проведено с ROPS и элементами машины, при температуре, °С: | |||||||||||||||||
Если эта температура выше минус 18°С, то должно быть выполнено следующее: | |||||||||||||||||
Требования прочности на удар по методу Шарпи для образцов с V-образным надрезом конструктивных элементов ROPS проверены на образцах размеров, мм | |||||||||||||||||
Поглощенная энергия, Дж | |||||||||||||||||
Класс прочности гаек | |||||||||||||||||
Класс прочности болтов | |||||||||||||||||
Кривая зависимости сила-деформация (отклонение) при испытаниях под нагрузкой | |||||||||||||||||
Кривая зависимости сила-деформация (отклонение), полученная по фактическим результатам испытаний, должна быть включена в протокол испытаний. Допустимо для изготовителя рассматривать эту кривую как конфиденциальную информацию в отношении опубликования. | |||||||||||||||||
Аттестация | |||||||||||||||||
Минимальные эксплуатационные требования ГОСТ ISO 8082-2 выполнены при испытаниях для максимальной массы машины, кг | |||||||||||||||||
Дата испытаний | |||||||||||||||||
Наименование и адрес испытательной организации | |||||||||||||||||
Инженер-испытатель | |||||||||||||||||
Дата/номер протокола испытаний | |||||||||||||||||
Приложение ДА (справочное). Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Приложение ДА
(справочное)
Таблица ДА.1 - Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Обозначение и наименование ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 3411:2007 Машины землеройные. Антропометрические данные операторов и минимальное рабочее пространство вокруг оператора | - | * |
ISO 5353:1995 Машины землеройные, тракторы и машины для сельского и лесного хозяйства. Контрольная точка сиденья | IDT | ГОСТ ИСО 5353-2003 Машины землеройные, тракторы и машины для сельскохозяйственных работ и лесоводства. Контрольная точка сиденья |
ISO 6814:2009 Машины для лесного хозяйства. Мобильные и самоходные машины. Термины, определения и классификация | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта или гармонизированный с ним национальный стандарт страны, на территории которой применяется настоящий стандарт. - IDT - идентичный стандарт. |
Таблица ДА.2 - Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам другого года издания
Обозначение и наименование ссылочного международного стандарта | Обозначение и наименование международного стандарта другого года издания | Степень соответствия | Обозначение и наименование межгосударственного стандарта |
ISO 898-1:2013 Механические свойства крепежных изделий из углеродистой и легированной стали. Часть 1. Болты, винты и шпильки с заданным классом прочности. Крупная и мелкая резьба | ISO 898-1:1978 Механические свойства крепежных изделий из углеродистых и легированных сталей. Часть 1. Болты, винты и шпильки | MOD | ГОСТ 1759.4-87* (ИСО 898-1/78) Болты, винты и шпильки. Механические свойства и методы испытаний (ИСО 898-1/78) |
ISO 898-2:2012 Механические свойства крепежных изделий из углеродистых и легированных сталей. Часть 2. Гайки с установленными классами прочности. Крупная резьба и резьба малого шага | ISO 898-2:1992 Механические свойства крепежных изделий. Часть 2. Гайки с установленными значениями контрольной нагрузки. Крупная резьба | MOD | ГОСТ 1759.5-87* (ИСО 898-2-80) Гайки. Механические свойства и методы испытаний (ISO 898-2:1980, MOD) |
ISO 3164:2013 Машины землеройные. Лабораторные испытания по оценке устройств защиты. Требования к пространству, ограничивающему деформацию | ISO 3164:1995 Машины землеройные. Защитные устройства. Лабораторные испытания по оценке защитных устройств. Характеристика объема ограничения деформации | IDT | ГОСТ ИСО 3164-2002 Машины землеройные. Защитные устройства. Характеристика объема ограничения деформации при лабораторных испытаниях (ISO 3164:1995) |
* Внесенные технические отклонения обеспечивают соответствие требованиям настоящего стандарта. |
Библиография
[1] ISO 148-1:2009 | Metallic materials - Charpy pendulum impact test - Part 1: Test method (Материалы металлические. Испытания на удар по Шарпи на маятниковом копре. Часть 1. Метод испытания) |
[2] ISO 3471:2008 | Earth-moving machinery - Roll-over protective structures - Laboratory tests and performance requirements (Машины землеройные. Устройства защиты при опрокидывании. Технические требования и лабораторные испытания) |
[3] ISO 12117-2:2008 | Earth-moving machinery - Laboratory tests and performance requirements for protective structures of excavators - Part 2: Roll-over protective structures (ROPS) for excavators of over 6 t (Машины землеройные. Лабораторные испытания и требования к рабочим характеристикам защитных конструкций экскаваторов. Часть 2. Конструкции для защиты при опрокидывании (ROPS) экскаваторов грузоподъемностью свыше 6 т) |
УДК 630.377.4:658.382.3:006.354 | МКС 65.060.80 | IDТ |
Ключевые слова: машины для леса самоходные, кабина на вращающейся платформе, устройство защиты при опрокидывании (ROPS), эксплуатационные требования, лабораторные испытания |
Электронный текст документа
и сверен по:
официальное издание
М.: Стандартинформ, 2015
{kind=link}