ГОСТ Р 58823-2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Автомобильные транспортные средства
СИСТЕМЫ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Классификация и определения
Road vehicles. Systems of autonomous driving. Classification and definitions
ОКС 43.040
Дата введения 2021-02-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Российский научно-технический центр информации по стандартизации и оценке соответствия" (ФГУП "")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 56 "Дорожный транспорт"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 30 октября 2020 г. N 1006-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт устанавливает классификацию, описывающую все уровни автоматизации управления движением автомобильных транспортных средств, а также функциональные определения для систем с высокой степенью автоматизации управления движением и связанных с ними терминов и понятий. Настоящий стандарт не содержит спецификаций или других требований к системам автоматического управления движением. Стандартизация уровней автоматизации управления движением и соответствующей терминологии служит определенным целям, включающим:
- прояснение роли водителя (человека), если он присутствует в условиях приведенной в действие системы автоматического управления движением;
- прояснение вопросов области применения при необходимости разработки законов, правил и стандартов;
- создание основы для разработки спецификаций и требований к системам автоматического управления движением;
- обеспечение ясности и единообразного понимания при обсуждении вопросов, связанных с системами автоматического управления движением, а также краткости терминологии для экономии затрат времени и труда.
При разработке настоящего стандарта использованы следующие принципы:
- стандарт должен быть описательным и информативным, а не нормативным;
- стандарт должен давать функциональные определения;
- стандарт должен быть согласованным с текущей промышленной практикой;
- стандарт должен быть полезным в разных областях, включая инженерную, законодательную, область средств массовой информации и общественные дискуссии;
- стандарт должен быть ясным и обоснованным, не содержать неоднозначных формулировок.
При подготовке стандарта использовались материалы из [1]*.
________________
* См. раздел Библиография. - .
1 Область применения
Настоящий стандарт устанавливает классификацию систем автоматизации управления движением для автомобильных транспортных средств, которые (системы) частично или полностью, в длительном режиме, выполняют задачу управления движением (ЗУД), с разделением по уровням.
Настоящий стандарт не распространяется на системы активной безопасности, такие как система электронного контроля устойчивости и система автоматического экстренного торможения, а также определенные типы систем помощи водителю, такие как система предупреждения о выходе из полосы движения, поскольку они выполняют ЗУД или ее часть не в длительном режиме, а в виде кратковременных вмешательств в случаях потенциально опасных ситуаций. В силу кратковременного характера действия систем активной безопасности их вмешательства не исключают и не изменяют функцию ("роль") водителя в выполнении ЗУД или ее части; поэтому данные системы не рассматриваются в аспекте автоматизации управления движением.
Функции предотвращения столкновений, включая системы активной безопасности кратковременного действия, могут входить в состав транспортных средств, оборудованных системами автоматизации управления движением любого уровня. Для транспортных средств, оснащенных системами автоматизации управления движением (т.е. систем уровней 3-5), которые полностью выполняют ЗУД, функции предотвращения столкновений входят в состав средств автоматизации управления движением.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 система активной безопасности (active safety system): Система транспортного средства, осуществляющая мониторинг внутренних и внешних параметров транспортного средства для того, чтобы выявить существующие и потенциальные опасности для транспортного средства, его пассажиров и/или других участников дорожного движения и автоматически вмешаться, для избежания или уменьшения последствий потенциальных столкновений, используя различные методы, которые включают предупреждение водителя, перенастройку или активное управление подсистемами транспортного средства (тормозами, топливоподачей, подвеской и т.д.).
Примечание - В настоящем стандарте системы, которые соответствуют определению "система активной безопасности", имеют своим назначением прежде всего улучшение безопасности, а не повышение комфорта, удобства или общую помощь водителю. Системы активной безопасности предупреждают или вмешиваются в случае опасной ситуации или маневра.
2.2 автоматическая система управления движением; АСУД (automated driving system, ADS): Аппаратные и программные средства, которые в совокупности способны выполнять всю ЗУД в длительном режиме вне зависимости от того, ограничена ли она конкретными условиями эксплуатации (УЭ).
Примечания
1 Данный термин используется при описании систем автоматизации управления движением уровней 3-5.
2 В отличие от АСУД, общий термин "система автоматизации управления движением" (см. 2.8) подразумевает систему или функцию любого уровня, от 1 до 5, которая выполняет ЗУД или ее часть в длительном режиме. Ввиду сходства между общим термином "система автоматизации управления движением" и термином "автоматическая система управления движением", применяемым для уровней 3-5, второй термин предпочтительнее использовать в виде аббревиатуры АСУД.
2.3 транспортное средство, предназначенное для АСУД; ТС-АСУД (ADS-dedicated vehicle, ADS-DV): Транспортное средство, сконструированное специально для применения автоматической системы управления движением уровня не ниже 4, которая активна в любых поездках в пределах ограничений УЭ.
Примечания
1 В результате обсуждения данного термина в настоящем стандарте сохранено отношение ТС-АСУД только к уровням автоматизации управления движением 4 и 5.
2 ТС-АСУД является в полном смысле "беспилотным" транспортным средством. Однако в настоящем стандарте не используется термин "беспилотное транспортное средство" ("driverless vehicle"), поскольку в настоящее время этот термин часто используют неправомерно, называя им любое транспортное средство, оснащенное системой автоматизации управления движением, даже если эта система не способна постоянно выполнять полную ЗУД (в пределах УЭ), требуя передачи управления водителю (человеку) в некоторые периоды поездки (см. раздел 7). Вместо данного термина в настоящем стандарте используется термин "беспилотное функционирование транспортного средства", который является более конкретным и позволяет избежать неточностей и недопонимания.
3 Конструкция ТС-АСУД может не содержать таких элементов, как педали акселератора и тормоза, рулевое колесо или рычаг управления трансмиссией, предназначенных в качестве органов управления для водителя (человека).
4 Управление ТС-АСУД может временно осуществляться водителем традиционным или удаленным способом в следующих случаях:
- при выходе за границы УЭ;
- при возникновении неисправностей;
- в автопарке перед выходом транспортного средства на маршрут.
Примеры
1 ТС-АСУД 4-го уровня, предназначенные для функционирования исключительно на территориях предприятий, где они перевозят пассажиров по маршруту, задаваемому диспетчером ТС-АСУД.
2 ТС-АСУД 4-го уровня, предназначенные для функционирования исключительно в пределах географически ограниченных деловых районов, где они перевозят грузы по дорогам (но не обязательно по фиксированным маршрутам), указанным диспетчером ТС-АСУД.
3 ТС-АСУД 5-го уровня, способные осуществлять поездки по любым дорогам между пунктами назначения, задаваемыми водителем (человеком). Пользователь такого транспортного средства задает пункт назначения, а ТС-АСУД автоматически следует в этот пункт.
2.4 диспетчерский центр (беспилотного функционирования) [dispatching entity (driverless operation)]: Центр, выполняющий централизованное управление беспилотным функционированием ТС, оснащенного АСУД.
Примечание - Функции, выполняемые диспетчерским центром, могут распределяться между несколькими исполнителями в соответствии с условиями использования рассматриваемого ТС с АСУД.
Пример - Парк ТС-АСУД 4-го уровня, работающих на закрытой территории предприятия, вводится в работу диспетчерским центром беспилотного функционирования, который активирует АСУД каждого транспортного средства после проверки его готовности к работе и деактивирует АСУД, когда транспортное средство заканчивает работу.
2.5 традиционное транспортное средство (транспортное средство с традиционным управлением) (conventional vehicle): Транспортное средство, предназначенное для управления обычным водителем на протяжении всей поездки или ее части.
Примечания
1 Определение обычного водителя приведено в 2.29.1.1.
2 Традиционное транспортное средство может быть снабжено функцией (функциями) автоматизации управления движением уровней 1 или 2 для поддержки водителя при выполнении ЗУД, но не для выполнения полной ЗУД, или функциями уровней 3 и 4, которые подразумевают, что обычный водитель управляет транспортным средством на протяжении некоторой части каждой поездки.
3 Хотя называть ТС, оснащенное АСУД, традиционным может быть интуитивно непонятным, в контексте настоящего стандарта это уместно, поскольку управление обычным водителем в таких ТС требуется, по крайней мере, на протяжении некоторой части каждой поездки. Как подчеркивается ниже, настоящий стандарт дает классификацию не транспортных средств, а уровней, которым соответствуют функции автоматизации управления движением (хотя в конкретном случае ТС-АСУД классификация АСУД практически является равнозначной классификации ТС).
Примеры
1 ТС, не оснащенное функциями автоматизации управления движением и предназначенное для управления обычным водителем во всех поездках.
2 ТС, оснащенное адаптивным круиз-контролем 1-го уровня, системой контроля полосы движения 1-го уровня и функцией АСУД 3-го уровня, предназначенной для выполнения полной ЗУД в условиях затрудненного дорожного движения на регулируемых автомагистралях. Перед включением функции АСУД 3-го уровня пользователь должен обеспечить выезд транспортного средства на автомагистраль. После того, как ТС покидает автомагистраль, пользователь снова должен принять на себя управление, чтобы завершить поездку.
3 ТС, оснащенное функцией автоматической парковки 4-го уровня, которая позволяет пользователю покинуть транспортное средство и, находясь рядом с парковочным местом, осуществлять диспетчеризацию процесса парковки.
2.6 диспетчеризация (беспилотного функционирования) [dispatch (in driverless operation)]: Централизованное активирование АСУД и управление работой ТС с АСУД в режиме беспилотного функционирования.
Примечания
1 При использовании вне контекста ТС с АСУД термин "диспетчеризация" обычно понимается в смысле отправки конкретного транспортного средства в конкретный пункт погрузки или разгрузки в рамках транспортных перевозок. В контексте ТС с АСУД, и в т.ч. в данном стандарте, этот термин включает диспетчеризацию нескольких ТС с АСУД в режиме беспилотного функционирования с помощью программного обеспечения. ТС с АСУД могут в течение дня или другого периода рабочего времени осуществлять различные поездки с погрузкой или выгрузкой пассажиров или грузов при участии нескольких исполнителей задач, связанных с функцией диспетчеризации. С целью подчеркнуть специальное использование термина "диспетчеризация" предлагается его модифицированный вариант, который означает исключительно диспетчеризацию транспортных средств в режиме беспилотного функционирования.
2 Потенциальными объектами диспетчеризации могут быть только ТС с АСУД с возможностью беспилотного функционирования (ТС-АСУД или двухрежимные ТС).
2.7 автоматизация управления движением (driving automation): Выполнение ЗУД или ее части в длительном режиме.
2.8 система (технология) автоматизации управления движением (driving automation system or technology): Аппаратные и программные средства систем автоматического управления движением 1-го-5-го уровней, которые в совокупности способны выполнять всю ЗУД или ее часть в длительном режиме.
Примечание - В отличие от этого общего термина, характеризующего системы 1-го-5-го уровней, термин "Автоматическая система управления движением" (АСУД) используется только для систем 3-го-5-го уровней. Ввиду сходства между общим термином "система автоматизации управления движением" и термином "автоматическая система управления движением", применяемым для уровней 3-5, второй термин предпочтительнее использовать в виде аббревиатуры АСУД (см. 2.2).
2.9 функция системы автоматизации управления движением (feature of application): Функция системы автоматизации управления движением, используемая на определенном уровне автоматизации управления движением в определенных УЭ.
Примечания
1 Система автоматизации управления движением может иметь несколько функций, каждая из которых используется на определенном уровне автоматизации управления движением в определенных УЭ.
2 Каждая функция удовлетворяет условиям использования.
3 Функции могут иметь общие названия (например, функция автоматической парковки) или патентованные названия (товарные знаки).
Примеры
1 Функция АСУД 3-го уровня, которая выполняет ЗУД, за исключением реакций на нештатные ситуации, в условиях интенсивного движения по регулируемым автомагистралям.
2 Функция АСУД 4-го уровня, которая выполняет ЗУД, включая реакции на нештатные ситуации, в пределах центральной части города.
2.10 функция поддержки водителя системы автоматизации управления движением [driver support (driving automation system) feature]: Общий термин, характеризующий функции автоматизации управления движением 1-го и 2-го уровней.
Примечание - Функции 1-го уровня (помощь водителю) и 2-го уровня (частичная автоматизация) способны выполнять только часть ЗУД и подразумевают, что водитель выполняет оставшуюся часть ЗУД, а также контролирует работу функций, когда они включены. Таким образом, эти функции, будучи включенными, осуществляют поддержку водителя в выполнении ЗУД, но не заменяют его.
2.11 беспилотное функционирование транспортного средства, оснащенного АСУД [driverless operation (of an ADS-equipped vehicle)]: Функционирование ТС, оснащенного АСУД, при котором на борту ТС либо нет пользователей, либо пользователи присутствуют, но не являются водителями или пользователями, готовыми к запасному варианту действий при выполнении ЗУД.
Примечания
1 Диспетчеризация ТС-АСУД всегда осуществляется в режиме беспилотного функционирования (см. примечание 4 в 2.3).
2 Диспетчеризация двухрежимных транспортных средств, оснащенных АСУД, может осуществляться в режиме беспилотного функционирования.
3 В данном термине слово "беспилотное" используется применительно не к самому транспортному средству, а к конкретному режиму его функционирования. Синонимом "беспилотного функционирования" является "функционирование в полностью автоматическом режиме". Использование термина "беспилотные" в отношении транспортных средств в настоящим стандартом не рекомендуется.
Пример - Диспетчеризация ТС-АСУД 4-го уровня осуществляется в режиме беспилотного функционирования при выполнении перевозок. Присутствующие на борту пассажиры не являются водителями или пользователями, готовыми к запасному варианту действий при выполнении ЗУД.
2.12 двухрежимное транспортное средство, оснащенное АСУД [dual-mode vehicle (ADS-equipped)]: Тип транспортного средства, оснащенного АСУД, которое предназначено как для беспилотного функционирования, так и для управления обычным водителем на протяжении всей поездки.
Примечания
1 Двухрежимное транспортное средство, оснащенное АСУД, может быть предназначено для диспетчеризации в режиме беспилотного функционирования.
2 Функция АСУД, которая может использоваться только на протяжении части поездки, например, функция, предназначенная для выполнения полной ЗУД в условиях затрудненного дорожного движения на автомагистралях, не является достаточным основанием для классификации оснащенного ею транспортного средства как двухрежимного, поскольку она не может осуществлять беспилотное функционирование ТС на протяжении полной поездки.
2.13 задача управления движением (ЗУД) [dynamic driving task (DDT)]: Совокупность выполняемых в реальном времени функций управления и планирования действий (тактические функции), которые требуются для управления транспортным средством в условиях дорожного движения, исключая стратегические функции, такие как планирование поездок, выбор пунктов назначения и промежуточных точек маршрутов.
Примеры (неисчерпывающие)
1 Управление траекторией движения транспортного средства посредством рулевого управления (функция управления).
2 Управление скоростью движения транспортного средства посредством команд ускорения (сигнал акселератора) и замедления (сигнал тормоза) (функция управления).
3 Наблюдение за дорожной обстановкой посредством функций распознавания и классификации объектов и ситуаций с планированием реакций на них (функции управления и планирования действий).
4 Осуществление реакций на объекты и события (функции управления и планирования действий).
5 Планирование маневров (тактическая функция).
6 Привлечение внимания световыми и звуковыми сигналами или знаками ("тактическая функция").
Примечания
1 Для упрощения и краткости терминологии подзадачи (функции) 3 и 4 будут обозначаться общим термином "распознавание объектов и событий и реагирование на них" (РОСР) (см. 2.20).
2 В настоящем стандарте используется термин "выполнение ЗУД". Он означает выполнение всех подзадач ЗУД либо водителем (человеком), либо системой автоматизации управления движением, либо ими обоими.
3 На рисунке А.1 приложения А показана блок-схема задачи управления движением. Более подробная информация о различиях между управляющими, тактическими и стратегическими функциями управления движением ТС приведена в 8.4.
2.14 запасной вариант действий (при выполнении ЗУД) ЗВД-ЗУД [(dynamic driving task, DDT) fallback]: Решение пользователя (водителя) продолжать выполнение ЗУД или выполнить условие минимизации рисков или решение АСУД выполнить условие минимизации рисков при возникновении системного сбоя, связанного с выполнением ЗУД, или при выходе за пределы УЭ.
Примечания
1 ЗУД и ЗВД-ЗУД - это разные функции, и способность системы выполнять одну из них не обязательно означает способность выполнять другую. Таким образом, АСУД уровня 3, которая может выполнять полную ЗУД в рамках условий эксплуатации, может быть не способна выполнить ЗВД-ЗУД во всех ситуациях, где это требуется, в связи с чем будет при необходимости выдавать запрос на вмешательство пользователя (водителя), готового к ЗВД-ЗУД.
2 Некоторые функции уровня 3 могут иметь возможность автоматического выполнения ЗВД и условия минимизации рисков в определенных обстоятельствах, например, если на ближайшей дорожной обочине отсутствуют препятствия (но не в иных обстоятельствах). Таким образом, присвоение уровня 3 не запрещает АСУД автоматически выполнять условие минимизации рисков, но и не является гарантией того, что условие минимизации рисков будет автоматически достигаться в любых случаях, возникающих в пределах УЭ. Кроме того, возможность автоматического достижения условия минимизации рисков в некоторых (но не во всех) обстоятельствах, в которых это требуется, не является признаком функциональности 4-го уровня.
3 АСУД уровня 3 способна продолжать выполнение ЗУД, по крайней мере, несколько секунд после выдачи запроса на вмешательство пользователя (водителя), готового для выполнения ЗВД-ЗУД. После этого предполагается, что пользователь (водитель), готовый для выполнения ЗВД-ЗУД, выполнит условие минимизации рисков, при необходимости.
4 АСУД уровней 4 и 5 должны быть способны выполнять ЗВД-ЗУД, а также обеспечивать условие минимизации рисков. Транспортные средства, снабженные АСУД уровней 4 и 5 и предусматривающие переход управления к водителю (с обычным или удаленным управлением), могут позволять пользователю выполнять ЗВД-ЗУД, при необходимости. Однако АСУД уровней 4 и 5 могут не предусматривать выполнение ЗВД-ЗУД водителем, в том числе для того, чтобы снизить риск аварий (см. 7.3).
5 Для АСУД уровней 4 и 5 может быть предусмотрено, что во время выполнения ЗВД-ЗУД для функций управления траекторией и/или скоростью транспортного средства вводятся ограничения по скорости и/или дальности перемещения транспортного средства [т.е. АСУД может переходить в режим аварийного возврата (так называемый режим "доползти до дома")].
Примеры
1 В функции АКК (адаптивного круиз-контроля) 1-го уровня возникает системный сбой, в результате чего функция прекращает свою работу. Водитель (человек) выполняет ЗВД-ЗУД, принимая на себя выполнение полной ЗУД.
2 Функция АСУД уровня 3, выполняющая полную ЗУД в условиях затрудненного дорожного движения, не способна работать при приближении к месту аварии и поэтому выдает запрос на вмешательство пользователя (водителя), готового для выполнения ЗВД-ЗУД. Пользователь отвечает на запрос, принимая на себя выполнение полной ЗУД для объезда места аварии. (В этом примере выполнение условия минимизации рисков не требуется).
3 В транспортном средстве, предназначенном для АСУД уровня 4, которое выполняет полную ЗУД в географически ограниченном центральном районе города, возникает системный сбой, связанный с выполнением ЗУД. В ответ ТС-АСУД выполняет ЗВД-ЗУД, включая аварийную сигнализацию, перемещаясь к дорожной обочине и останавливаясь, а затем автоматически вызывая службу экстренной помощи. (В этом примере ТС-АСУД автоматически выполняет условие минимизации рисков). На рисунках Б.1-Б.6 приложения Б показаны схемы последовательности событий ЗВД-ЗУД для различных уровней автоматизации управления движением.
2.15 управление траекторией транспортного средства (lateral vehicle motion control): Подзадача ЗУД, включающая действия, необходимые для длительного управления в реальном времени движением транспортного средства в направлении оси Y и его поворотом относительно оси Z (см. рисунок 1).
Примечания
1 Управление траекторией транспортного средства включает определение положения транспортного средства относительно границ полосы движения и воздействие на рулевое управление и/или селективное торможение колес с целью сохранения требуемого поперечного положения транспортного средства.
2 Рисунок 1 в соответствии с [2].
|
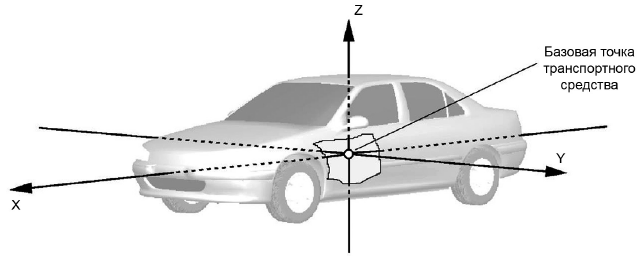
Рисунок 1 - Подвижная система координат транспортного средства
2.16 управление скоростью транспортного средства (longitudinal vehicle motion control): Подзадача ЗУД, включающая действия, необходимые для длительного управления в реальном времени движением транспортного средства в направлении оси X (см. рисунок 1).
Примечание - Управление скоростью транспортного средства включает поддержание заданной скорости, а также обнаружение идущего впереди попутного транспортного средства, поддержание необходимой дистанции до идущего впереди транспортного средства и создание тягового или тормозного усилия для поддержания требуемой скорости или дистанции.
2.17 условие минимизации рисков (minimal risk condition): Условие (состояние), к которому пользователь или АСУД приводят транспортное средство, выполняя ЗВД-ЗУД в целях снижения риска аварии, когда поездка должна быть прервана или не может быть продолжена.
Примечания
1 При использовании систем уровней 1 и 2 предполагается, что обычный водитель выполняет условие минимизации рисков, когда в этом есть необходимость.
2 При использовании систем уровня 3 при возникновении в транспортном средстве или в АСУД системного сбоя, связанного с выполнением ЗУД, предполагается, что пользователь, готовый для выполнения ЗВД-ЗУД, выполнит условие минимизации рисков, при необходимости, или продолжит выполнение ЗУД, если транспортное средство работоспособно.
3 АСУД уровней 4 и 5 способны автоматически выполнять условие минимизации рисков, при необходимости (т.е. в случаях выхода из УЭ, если это применимо, или в случае системного сбоя, связанного с выполнением ЗУД, в транспортном средстве или в АСУД). Характеристики выполнения условия минимизации рисков на уровнях 4 и 5 могут изменяться в зависимости от типа и степени системного сбоя, УЭ рассматриваемой функции АСУД (если это применимо), условий работы системы во время возникновения сбоя или выхода из УЭ. Результатом может быть автоматическая остановка транспортного средства на пути его следования или более сложный маневр, в ходе которого транспортное средство покидает полосу движения и/или автоматически возвращается в место своего базирования.
Примеры
1 Функция АСУД 4-го уровня, предназначенная для управления ТС при высокоскоростном движении по автомагистрали, обнаружив системный сбой, связанный с выполнением ЗУД, автоматически уводит ТС с полосы движения, а затем останавливает его.
2 В транспортном средстве, оборудованном АСУД 4-го уровня, происходит системный сбой, связанный с выполнением ЗУД и возникший в электрической энергоустановке. АСУД задействует запасной источник энергии для выполнения условия минимизации рисков.
2.18 системный сбой (связанный с выполнением ЗУД) [system failure (DDT performance-relevant)]: Неисправность в системе автоматизации управления движением и/или в транспортном средстве, не позволяющая системе автоматизации управления движением в длительном режиме надежно выполнять ЗУД (полную или ее часть).
Примечания
1 Данное определение применяется к тем неисправностям транспортного средства и системы автоматизации управления движением, которые не позволяют системе автоматизации управления движением работать в полном соответствии с ее назначением.
2 Данное определение не применяется к временным перерывам (отклонениям) в работе систем автоматизации управления движением уровней 1 и 2, связанным с их функциональными ограничениями, которые не создают каких-либо других препятствий для выполнения части ЗУД в длительном режиме.
Примеры
1 В одной из камер технического зрения системы автоматизации управления движением 1-го уровня, которая выполняет подзадачу ЗУД, связанную с управлением траекторией транспортного средства, происходит системный сбой, связанный с выполнением ЗУД, что не позволяет системе надежно распознавать линии дорожной разметки. Функция выводит сообщение о неисправности на центральную панель приборов и одновременно автоматически выключается, что требует немедленного принятия водителем на себя подзадачи ЗУД, связанной с управлением траекторией транспортного средства.
2 В одном из радаров системы автоматизации управления движением 3-го уровня происходит системный сбой, связанный с выполнением ЗУД, что не позволяет системе надежно распознавать объекты на пути транспортного средства. Реакцией АСУД является запрос на вмешательство пользователя, готового для выполнения ЗВД-ЗУД. АСУД продолжает выполнять ЗУД в течение нескольких секунд, уменьшая скорость транспортного средства, чтобы позволить пользователю, готовому для выполнения ЗВД-ЗУД, спокойно принять на себя управление транспортным средством.
3 В транспортном средстве с работающей АСУД 3-го уровня происходит поломка рулевой тяги, что значительно ухудшает управляемость транспортного средства. Система сигнализирует о неисправности, требующей вмешательства, создавая ясно ощущаемое водителем физическое воздействие. Пользователь, готовый для выполнения ЗВД-ЗУД, отвечает, принимая на себя выполнение ЗУД, включая аварийную световую сигнализацию и перемещая транспортное средство на ближайшую дорожную обочину, таким образом выполняя условие минимизации рисков.
4 В одном из вычислительных блоков АСУД 4-го уровня происходит системный сбой, связанный с выполнением ЗУД. АСУД выполняет ЗВД-ЗУД, включая запасной вычислительный блок (блоки) для выполнения условия минимизации рисков.
2.19 мониторинг (monitor): Общий термин, означающий набор функций, которые выполняются человеком или машиной в реальном времени и включают наблюдение и обработку данных, используемых для управления транспортным средством или для обеспечения возможности управления им.
Примечания
1 Перечисленные в примечании 2 термины, описывающие типы мониторинга, должны использоваться в том случае, если общий термин "монитор" и его производные недостаточно точны.
2 Термины, приведенные в 2.19.1-2.19.4, описывают категории мониторинга (см. раздел 1 в отношении первичных исполнителей).
3 Требуемое уровнем 3 состояние водителя, характеризующееся вниманием к предупреждениям или другим индикаторам системных сбоев, связанных с выполнением ЗУД, не является формой мониторинга. Разница между вниманием и мониторингом может быть проиллюстрирована следующим примером: человек, который замечает пожарную тревогу или слышит звонок телефона, не обязательно осуществляет наблюдение (мониторинг) сигнала тревоги или телефона. Аналогично человек, который замечает, что сцепное устройство прицепа отсоединяется, не обязательно осуществляет мониторинг сцепного устройства. Напротив, водитель транспортного средства с работающей системой АКК уровня 1 должен наблюдать (осуществлять мониторинг) за окружением и работой системы АКК, но не ожидать предупреждающих сигналов, которые привлекают внимание к ситуации, требующей реакции (см. 2.18).
2.19.1 мониторинг пользователя (monitor the user): Действия и/или автоматизированные операции, предназначенные для оценки степени, в которой пользователь выполняет предписанную ему роль (функцию).
Примечания
1 С точки зрения автоматизации управления движением мониторинг пользователя, как правило, предназначен для предотвращения неправильного использования или злоупотребления АСУД (включая неоправданно высокое доверие к ней), однако может быть использован и для других целей.
2 Мониторинг пользователя актуален в основном на уровнях 2 и 3. В отношении систем более низкого уровня нет свидетельств неправильного использования или злоупотребления технологией автоматизации управления движением. АСУД более высокого уровня всегда способны выполнять условие минимизации рисков.
2.19.2 мониторинг дорожной обстановки (monitor the driving environment): Необходимые для управления транспортным средством действия и/или автоматизированные операции, которые осуществляют в реальном времени обнаружение, распознавание и классификацию объектов и событий дорожной обстановки, а также подготовку реакций на них (но не выполнение этих реакций).
Примечание - При управлении традиционными транспортными средствами, которые не оснащены АСУД, водители наблюдают за дорожной обстановкой в степени, достаточной для выполнения полной ЗУД, а также выполняют второстепенные задачи, для которых требуется кратковременное отвлечение от наблюдения за дорогой (например, настройку средств обеспечения комфорта в салоне, наблюдение за дорожными знаками, настройку радио и т.д.). Таким образом, мониторинг дорожной обстановки не обязательно подразумевает непрерывное наблюдение водителя за дорогой.
2.19.3 мониторинг транспортного средства (для обнаружения системных сбоев, связанных с выполнением ЗУД) [monitor vehicle performance (for DDT performance-relevant system failures)]: Необходимые для управления транспортным средством действия и/или автоматизированные операции, которые осуществляют в реальном времени оценку работы транспортного средства и подготовку реакций.
Примечание - АСУД 4-го и 5-го уровней выполняют наблюдение за работой транспортного средства при выполнении ЗУД. В системах 1-го - 3-го уровней от водителя (человека) требуется восприимчивость к состояниям транспортного средства, которые негативно влияют на выполнение ЗУД (см. определение термина "восприимчивость" в 2.23).
Примеры
1 АСУД 2-го уровня включена при работе транспортного средства в режиме "движение - остановка". Неисправность в тормозном механизме вызывает небольшое смещение транспортного средства влево при замедлении. Водитель (человек) замечает отклонение транспортного средства от заданной траектории и либо корректирует траекторию, либо полностью отключает систему автоматизации управления движением.
2 АСУД 4-го уровня включена при работе транспортного средства в режиме "движение - остановка". Неисправность в тормозном механизме вызывает небольшое смещение транспортного средства влево при замедлении. АСУД распознает данное отклонение, корректирует траекторию транспортного средства и переходит в режим аварийного возврата ("доползти до дома"), пока не достигается условие минимизации рисков.
2.19.4 мониторинг системы автоматизации управления движением (monitor driving automation system performance): Действия и/или автоматизированные операции, оценивающие правильность выполнения системой автоматизации управления движением ЗУД или ее части.
Примечания
1 Термин "мониторинг системы автоматизации управления движением" не должен использоваться в смысле контроля, который включает как мониторинг, так и реагирование, необходимое для выполнения ЗУД, являясь, таким образом, более объемлющим.
2 Распознавание запросов на вмешательство (пользователя), формируемых АСУД, является не формой мониторинга АСУД, а проявлением восприимчивости.
3 На уровнях 1 и 2 наблюдение за работой АСУД выполняет водитель.
4 При высоких уровнях автоматизации управления движением (3-5) наблюдение за работой системы автоматизации управления движением, выполняющей полную ЗУД, осуществляет сама АСУД.
Примеры
1 Обычный водитель наблюдает за тем, чтобы работающая система АКК поддерживала достаточную дистанцию до идущего впереди транспортного средства, следуя за ним в повороте.
2 Удаленный водитель, включая функцию автоматической парковки 2 уровня, осуществляет мониторинг пути следования транспортного средства, чтобы обеспечить отсутствие на нем пешеходов и препятствий.
2.20 распознавание объектов и событий и реагирование на них; РОСР [object and event detection and response (OEDR)]: Подзадачи ЗУД, включающие мониторинг дорожной обстановки (обнаружение, распознавание, классификацию объектов и событий, а также подготовку реакций на них) и реагирование на объекты и события (т.е. действия, необходимые для выполнения полной ЗУД или ЗВД-ЗУД).
2.21 управление (механическим транспортным средством) [operate (a motor vehicle)]: Действия, выполняемые водителем (человеком) (с задействованием одной или более функций автоматизации управления движением 1-го - 2-го уровней или без них) или АСУД (уровни 3-5) для выполнения ЗУД во время движения данного транспортного средства.
Примечания
1 Термин "водить" не используется в настоящем стандарте, однако во многих случаях его использование в смысле "управлять" является корректным.
2 Использование термина "управлять/управление" подразумевает наличие термина "оператор" (который осуществляет управление). Однако в настоящем стандарте его определение отсутствует. Вместо него используются конкретные термины и определения, обозначающие разные виды пользователей транспортного средства, оснащенных АСУД (см. 2.29).
2.22 условия эксплуатации (АСУД); УЭ (АСУД) [operational design domain (ODD)]: Конкретные условия, для работы в которых предназначена данная система или функция автоматизации управления движением, включая (но не ограничиваясь) условия окружающей среды, географический регион, ограничения, связанные с временем суток, и/или наличие или отсутствие определенных характеристик автодорог или дорожного движения.
Примечание - Описание значимости УЭ с точки зрения уровней автоматизации управления движением приведено в разделе 5.
Примеры
1 Функция АСУД, предназначенная для управления транспортным средством на регулируемых автомагистралях в хорошем эксплуатационном состоянии (четкая дорожная разметка, отсутствие дорожных работ), при низкоскоростном движении, в хороших погодных условиях.
2 АСУД-ТС, предназначенная для эксплуатации в пределах географически ограниченной военной базы, только в дневное время при скорости не выше 40 км/ч.
3 Коммерческое АСУД-ТС, предназначенное для перевозки грузов из зоны морского порта по определенному маршруту в распределительный центр, находящийся на расстоянии 50 км. УЭ транспортного средства ограничены работой только в дневное время в данном порту, в пределах указанных магистралей, соединяющих данный порт с конкретным распределительным центром.
2.23 восприимчивость (пользователя) [receptivity (of the user)]: Форма сознательной деятельности человека, характеризуемая его способностью сосредотачивать внимание в ответ на внешнее воздействие.
Примечания
1 При автоматизации управления движением уровней 0-2 водитель должен быть восприимчивым по отношению к неисправностям транспортного средства, таким как поломка рулевой тяги.
2 При автоматизации управления движением уровня 3 считается, что пользователь, готовый для выполнения ЗВД-ЗУД, восприимчив по отношению к запросам на вмешательство и/или к неисправностям транспортного средства вне зависимости от того, выдает ли АСУД запрос на вмешательство в ответ на неисправность транспортного средства.
3 Наблюдение (мониторинг) подразумевает восприимчивость.
Примеры
1 Во время выполнения ЗУД системой автоматизации управления движением 3-го уровня в режиме "движение - остановка" происходит поломка левой рулевой тяги. Пользователь, готовый для выполнения ЗВД-ЗУД, замечает, что транспортное средство существенно отклоняется влево, и вмешивается для того, чтобы переместить транспортное средство к дорожной обочине.
2 Во время выполнения ЗУД системой автоматизации управления движением 3-го уровня на нерегулируемой автомагистрали левое зеркало заднего вида выпадает из своего корпуса. Пользователь, готовый для выполнения ЗВД-ЗУД, хотя и является восприимчивым, не замечает и не должен замечать эту неисправность, поскольку она не является типичной.
2.24 запрос на вмешательство (request to intervene): Сообщение, выдаваемое водителю системой автоматизации управления движением, о том, что он должен быстро выполнить ЗВД-ЗУД, что может означать принятие на себя управление транспортным средством (т.е. роли водителя) или выполнение условия минимизации рисков, если транспортное средство неработоспособно.
2.25 контроль (работы системы автоматизации управления движением) [supervise (driving automation system performance)]: Действия водителя, выполняемые во время управления транспортным средством при работающей функции системы автоматизации управления движением уровня 1 или 2, с целью мониторинга работы этой функции, реагирования на некорректные действия этой функции и (непрямого) выполнения ЗУД.
Пример - Водитель замечает, что работающая система АКК в повороте не поддерживает дистанцию до идущего впереди транспортного средства и, соответственно, выполняет торможение.
2.26 длительный режим (управления транспортным средством) [sustained (operation of a vehicle)]: Выполнение всей ЗУД или ее части во время возникновения внешних событий и между ними, включая реагирование на внешние события и продолжение выполнения всей ЗУД или ее части в отсутствие внешних событий.
Примечания
1 Внешние события - это ситуации, которые требуют реагирования водителя или системы автоматизации управления движением (например, появление других транспортных средств, дорожная разметка, дорожные знаки).
2 Длительное выполнение всей ЗУД или ее части системой автоматизации управления движением изменяет роль пользователя (см. обсуждение "ролей" в разделе 1). В противоположность этому, вмешательство автоматической системы, которое не является длительным в соответствии с данным определением, не может быть определено как автоматизация управления движением. Следовательно, системы, которые выполняют кратковременные вмешательства в управление траекторией и/или скоростью, не выполняя всю ЗУД или ее часть в длительном режиме (например, антиблокировочные тормозные системы, системы электронного контроля курсовой устойчивости, системы автоматического экстренного торможения) (соответствуют уровню 0).
3 Обычный круиз-контроль не является системой длительного действия, поскольку не реагирует на внешние события. Поэтому он также соответствует уровню 0.
2.27 поездка (trip): Перемещение транспортного средства из пункта отправления в пункт назначения.
Примечание - Во время конкретной поездки вся ЗУД или ее часть может выполняться водителем, системой автоматизации управления движением или ими обоими.
2.28 условия использования (usage specification): Уровень автоматизации управления движением, используемый в пределах данных УЭ.
Примеры
1 Автоматизация управления движением уровня 3 при интенсивном дорожном движении на автомагистралях, обозначенных как полностью регулируемые.
2 Автоматизация управления движением в областях, обозначенных как "центр города".
2.29 пользователь (человек) [user (human)]: Общий термин, используемый для обозначения роли человека в автоматизации управления движением.
Примечания
1 Термины, приведенные в 2.29.1-2.29.4, описывают категории пользователей (людей).
2 Данные категории пользователей описывают роли, которые не пересекаются между собой, и могут выполняться в различных последовательностях во время поездки.
2.29.1 водитель [driver (human)]: Пользователь, который в реальном времени выполняет всю ЗУД или ее часть, или ЗВД-ЗУД на данном транспортном средстве.
Примечание - В транспортном средстве, которое снабжено АСУД, во время поездки водитель может принимать от АСУД или передавать ей выполнение всей ЗУД или ее части.
2.29.1.1 обычный водитель (conventional driver): Водитель, который непосредственно осуществляет физические управляющие воздействия на органы управления транспортного средства.
Примечание - Обычный водитель должен находиться на водительском месте, которое обеспечивает доступ водителя (человека) к органам управления транспортным средством (рулевому колесу, педалям управления двигателем и тормозами, рычагу переключения передач и другим).
2.29.1.2 удаленный водитель (remote driver): Водитель, который не находится на водительском месте, но тем не менее может управлять транспортным средством.
Примечания
1 Удаленным водителем может являться пользователь, который находится внутри транспортного средства, или на расстоянии видимости от транспортного средства, или за пределами расстояния видимости от транспортного средства.
2 Следует различать удаленного водителя (см. 2.29.1.2) и диспетчера (см. 2.29.4), хотя диспетчер может стать удаленным водителем, если имеет возможность удаленно управлять транспортным средством.
3 Удаленным водителем не является лицо, создающее условия движения, которые воспринимаются или передаются АСУД [например, офицер полиции, сообщающий по громкой связи, что какой-либо дорожный знак (знак "стоп") в настоящий момент не действует, или другой водитель, который предупреждает об обгоне световым сигналом, или пешеход, сообщающий о своем присутствии с помощью средств специальной связи].
Примеры
1 Функция автоматической парковки 2-го уровня позволяет удаленному водителю покинуть транспортное средство и, находясь рядом с местом стоянки, управлять маневром автоматической парковки транспортного средства, нажимая и удерживая специальную кнопку на брелоке ключа и одновременно осуществлять мониторинг дорожной обстановки на предмет появления кого-либо или чего-либо на пути транспортного средства, выполняющего маневр парковки. Если при выполнении маневра на пути транспортного средства оказывается, например, собака, удаленный водитель отпускает кнопку на брелоке, чтобы автоматически остановить транспортное средство. В данном примере с АСУД уровня 2 удаленный водитель во время маневра парковки выполняет подзадачу РОСР ЗУД.
2 Та же ситуация, что и в примере 1, но с тем отличием, что удаленный водитель находится не снаружи транспортного средства, а на его заднем сиденье.
3 В развозном транспортном средстве уровня 4, функционирующем на закрытой территории предприятия, произошел системный сбой, связанный с выполнением ЗУД, который заставил транспортное средство выполнить условие минимизации рисков - остановку на дорожной обочине; после этого удаленный водитель перемещает транспортное средство в автопарк, управляя им с помощью беспроводных средств связи.
2.29.2 пассажир (passenger): Пользователь транспортного средства, который не выполняет управление транспортным средством.
Примеры
1 Человек, находящийся на месте водителя в транспортном средстве, снабженном функцией АСУД 4-го уровня, которая предназначена для автоматического управления транспортным средством на регулируемых автомагистралях, является пассажиром, пока эта функция 4-го уровня активна. Однако тот же человек является водителем до включения этой функции АСУД 4-го уровня, а также после выключения этой функции в случае, если транспортное средство покидает регулируемую автомагистраль.
2 Пользователи развозного транспортного средства, предназначенного для функционирования на закрытой территории университетского кампуса и оборудованного функцией АСУД 4-го уровня, которая в настоящий момент включена, являются пассажирами.
3 Пользователи двухрежимного транспортного средства, оборудованного АСУД 5-го уровня, являются пассажирами, если эта АСУД 5-го уровня активна.
2.29.3 пользователь, готовый к ЗВД-ЗУД [(DDT) fallback-ready user]: Пользователь транспортного средства, оборудованного активной в настоящий момент функцией АСУД 3-го уровня, который может управлять транспортным средством и восприимчив к запросам на вмешательство, которые выдает АСУД, а также к явным системным сбоям, связанным с выполнением ЗУД и вынуждающим его выполнить ЗВД-ЗУД.
Примечания
1 Выполнение ЗУД системой 3-го уровня предполагает, что пользователь, готовый к ЗВД-ЗУД, готов надлежащим образом выполнять ЗУД. В случае систем 4-го и 5-го уровней этого не предполагается.
2 Пользователь, готовый к ЗВД-ЗУД, приступающий к выполнению полной ЗУД или ее части, становится водителем.
Пример - АСУД 3-го уровня, выполняющая ЗУД в условиях затрудненного дорожного движения на автомагистрали, получает от внешнего источника экстренный сигнал о необходимости съезда с автомагистрали из-за возникновения серьезной дорожной аварии; АСУД выдает запрос на вмешательство, адресованный пользователю, готовому для ЗВД-ЗУД, и предписывающий ему взять на себя выполнение ЗУД (т.е. стать водителем).
2.29.4 диспетчер (беспилотного функционирования) (driverless operation dispatcher): Пользователь(и), осуществляющий(ие) диспетчеризацию беспилотного функционирования транспортного средства, оснащенного АСУД.
2.30 транспортное средство (vehicle): Устройство, предназначенное для перевозки людей, грузов или оборудования, установленного на нем.
Примечания
1 В настоящем стандарте термин "транспортное средство" обозначает механические транспортные средства и не включает транспортные средства, которые передвигаются только по рельсам.
2 Типы транспортных средств, рассматриваемые в настоящей рекомендуемой практике, включают ТС, оснащенные АСУД, ТС-АСУД, двухрежимные ТС и традиционные ТС. ТС-АСУД и двухрежимные ТС всегда рассматриваются (и являются) ТС, оснащенными АСУД. Традиционные ТС могут быть оснащены или не оснащены АСУД.
3 Общие положения
В настоящем стандарте приведены функциональные определения этих шести уровней автоматизации управления движением автомобильных транспортных средств (далее - транспортные средства) при их движении по дорогам. Определения уровней вместе со вспомогательными терминами и определениями, которые также приведены в настоящем стандарте, могут использоваться для описания всех функций автоматизации управления движением, которыми снабжаются транспортные средства, в последовательной и логичной форме. Под термином "дороги" понимаются дороги общего пользования (включая парковки и территории, находящиеся в частной собственности, открытые для общественного доступа), которыми могут пользоваться владельцы транспортных средств с любым уровнем автоматизации управления движением (включая отсутствие функций автоматического управления движением), а также мотоциклисты, велосипедисты и пешеходы.
Разделение на уровни применяется в отношении функций автоматизации управления движением, которые активируются в любых случаях движения транспортного средства, снабженного этими функциями. Хотя транспортное средство может быть оборудовано системой автоматизации управления движением, которая включает в себя несколько функций автоматизации управления движением, соответствующих различным уровням, уровень автоматизации управления движением, обеспечиваемый в каждом конкретном случае, определяется только той функцией(ями), которая(ые) активна(ы) в настоящий момент.
В настоящем стандарте также вводятся три первичных действующих субъекта управления движением: водитель (человек), система автоматизации управления движением, другие системы и компоненты транспортного средства. Другие системы транспортного средства (или само транспортное средство) в соответствии с этой моделью не включают в себя систему автоматизации управления движением, хотя на практике система автоматизации управления движением может иметь общие аппаратные или программные компоненты с другими системами транспортного средства, например, общие вычислительные устройства или общий программный код.
Уровни автоматизации управления движением определяются в соответствии с функциями ("ролями"), которые выполняет каждый из трех первичных действующих субъектов в решении ЗУД. Под функцией ("ролью") в данном случае имеется ввиду та функция ("роль"), которую должен выполнять первичный действующий субъект в соответствии с тем, как устроена система автоматизации управления движением, но которая не обязательно выполняется им по факту. Например, водитель, который не наблюдает за дорогой при включении системы адаптивного круиз-контроля (АКК) первого уровня, все равно считается выполняющим функцию ("роль") водителя, несмотря на то, что пренебрегает ею.
4 Классификация автоматизации управления движением
4.1 Термины, приведенные в разделе 2, являются основой классификации автоматизации управления движением, которая состоит из шести отличных друг от друга и взаимоисключающих уровней (см. 8.2). Центральным аспектом этой классификации являются роли пользователя (человека) и системы автоматизации управления движением и их взаимосвязь. Изменения функциональности системы автоматизации управления движением меняют роль пользователя (человека), создавая основу для классификации подобных систем.
Примеры
1 Если система автоматизации управления движением в длительном режиме выполняет подзадачи ЗУД, связанные с управлением скоростью или траекторией транспортного средства, то водитель не выполняет эти задачи, хотя и предполагается, что он должен выполнять ЗУД. Это разделение ролей соответствует 1-му и 2-му уровням автоматизации управления движением.
2 Если система автоматизации управления движением выполняет всю ЗУД, то ее не выполняет пользователь. Однако, если предполагается, что пользователь, готовый к ЗВД-ЗУД, должен принять на себя выполнение ЗУД при возникновении системного сбоя, связанного с выполнением ЗУД, или в случае, если система автоматизации управления движением выходит за пределы своих условий эксплуатации (УЭ), то данный пользователь должен быть восприимчивым и способным принять на себя выполнение ЗУД после получения соответствующего предупреждения. Это разделение ролей соответствует уровню 3.
3 Если система автоматизации управления движением способна выполнять всю ЗУД, а также ЗВД-ЗУД либо в пределах, предписанных УЭ, либо в любых дорожных ситуациях (неограниченные УЭ), то все пользователи, находящиеся внутри транспортного средства во время работы АСУД, являются пассажирами. Это разделение ролей соответствует уровням 4 и 5.
В настоящей классификации автоматизации управления движением транспортное средство также имеет "роль", однако роль транспортного средства не изменяет роли пользователя в выполнении ЗУД.
4.2 Системы автоматизации управления движением разделены на уровни на основе следующих критериев:
а) если система автоматизации управления движением выполняет подзадачу ЗУД, связанную с управлением либо скоростью, либо траекторией транспортного средства;
б) если система автоматизации управления движением выполняет подзадачу ЗУД, связанную с управлением одновременно и скоростью, и траекторией транспортного средства;
в) если система автоматизации управления движением также выполняет РОСР - подзадачу ЗУД;
г) если система автоматизации управления движением также выполняет ЗВД-ЗУД;
д) если система автоматизации управления движением имеет ограничения по УЭ.
Описание шести уровней автоматизации управления движением в соответствии с этими пятью критериями приведено в таблице 1.
Классификация уровней автоматизации управления движением является описательной и информативной, а не нормативной, и носит технический, а не правовой характер. Приведенные описания характеризуют минимальные возможности систем для каждого из уровней. В данной таблице термин "система" означает систему автоматизации управления движением или автоматическую систему управления движением (АСУД).
Таблица 1 - Уровни автоматизации управления движением
Уро- | Название | Определение | ЗУД | ЗВД-ЗУД | УЭ | ||
вень авто- | Управление скоростью и траекторией в длительном режиме | РОСР | |||||
Водитель выполняет всю ЗУД или ее часть | Водитель | Водитель | Водитель | - | |||
0 | Автоматизация управления движением отсутствует | Вся ЗУД выполняется водителем, в т.ч. при наличии помощи со стороны систем активной безопасности | |||||
1 | Помощь водителю | Выполнение подзадачи ЗУД, связанной с управлением либо скоростью, либо траекторией транспортного средства (но не обеими одновременно), в длительном режиме, в определенных УЭ, подразумевающее, что остальные части ЗУД выполняются водителем | Водитель и система | Водитель | Водитель | Ограниченные | |
2 | Частичная автоматизация управления движением | Выполнение подзадачи ЗУД, связанной с управлением скоростью и траекторией транспортного средства, в длительном режиме, в определенных УЭ, подразумевающее, что водитель выполняет РОСР и контролирует работу системы автоматизации управления движением | Система | Водитель | Водитель | Ограниченные | |
АСУД выполняет всю ЗУД (будучи активированной) | Система | Система | Пользователь, | Ограниченные | |||
3 | Условная автоматизация управления движением | АСУД выполняет всю ЗУД в длительном режиме, в определенных УЭ, подразумевая, что пользователь, готовый к ЗВД-ЗУД, восприимчив к запросам на вмешательство, генерируемым АСУД, а также к сбоям, связанным с выполнением ЗУД, в других системах транспортного средства, и будет реагировать должным образом | готовый к ЗВД-ЗУД (становится водителем во время ЗВД) | ||||
4 | Высокая автоматизация управления движением | АСУД выполняет всю ЗУД в длительном режиме, в определенных УЭ, не подразумевая, что пользователь будет реагировать на запросы о вмешательстве | Система | Система | Система | Ограниченные | |
5 | Полная автоматизация управления движением | АСУД выполняет всю ЗУД в длительном режиме, без ограничений УЭ, не подразумевая, что пользователь будет реагировать на запросы о вмешательстве | Система | Система | Система | Неограниченные | |
4.3 На рисунке 2 показана упрощенная диаграмма, предназначенная для классификации функций автоматизации управления движением. Информация, необходимая для ответа на вопросы, которые представлены на данном рисунке, не может быть получена опытным путем (см. 8.1).
|
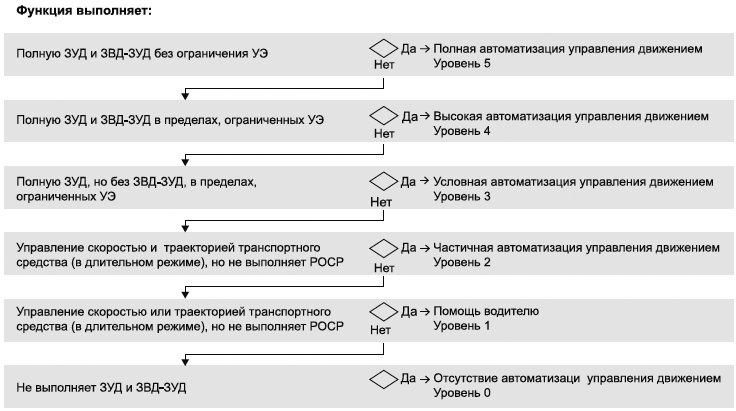
Рисунок 2 - Упрощенная логическая диаграмма для выбора уровня автоматизации управления движением, которому соответствует данная функция
Таблица 2 характеризует шесть уровней автоматизации в аспекте "ролей" (если таковые имеются), которые пользователь и система автоматизации управления движением играют в выполнении ЗУД и ЗВД-ЗУД.
Примечание - Данное назначение "ролей" относится к техническим, а не к правовым аспектам функционирования транспортного средства.
Описания, представленные в графе 2 таблицы 2, обозначают "роль" (если таковая имеется) пользователя в выполнении полной ЗУД или ее части и/или в выполнении ЗВД-ЗУД. Описания, представленные в графе 3, обозначают "роль" (если таковая имеется) системы автоматизации управления движением в выполнении тех же задач. Как и в таблице 1, термин "система" обозначает систему автоматизации управления движением или АСУД.
Следует отметить, что "роли" определяются устройством системы автоматизации управления движением в сочетании с инструкциями, предоставляемыми пользователю, вне зависимости от неисправностей в конкретной системе автоматизации управления движением или от неправильного выполнения пользователем своей роли в данных обстоятельствах (см. 7.1).
Таблица 2 - Роли водителя (человека) и системы автоматизации управления движением в зависимости от уровня автоматизации управления движением
Уровень автоматизации управления движением | Роль пользователя | Роль системы автоматизации управления движением |
Водитель выполняет ЗУД или ее часть | ||
Уровень 0 - автоматизация управления движением отсутствует | Водитель (постоянно): | Система автоматизации управления движением (если таковая имеется): |
Уровень 1 - помощь водителю | Водитель (постоянно): | Система автоматизации управления движением (во включенном состоянии): |
Уровень 2 - частичная автоматизация управления движением | Водитель (постоянно): | Система автоматизации управления движением (во включенном состоянии): |
АСУД выполняет полную ЗУД | ||
Уровень 3 - условная автоматизация управления движением | Водитель (когда АСУД выключена): | АСУД (в выключенном состоянии) может быть включена только в пределах УЭ. |
Уровень 4 - высокая автоматизация управления движением | Водитель/диспетчер (когда АСУД выключена): | АСУД (в выключенном состоянии) может быть включена только в пределах УЭ. |
Уровень 5 - полная автоматизация управления движением | Водитель/диспетчер (когда АСУД выключена): | АСУД (в выключенном состоянии) может быть включена в любых дорожных условиях, позволяющих осуществлять управление движением. |
________________ | ||
4.4 Таблица 3 описывает роль пользователя по отношению к включенной системе автоматизации управления движением, работающей на определенном уровне автоматизации управления движением в определенный момент времени. В течение данной конкретной поездки пользователь, находящийся в данном транспортном средстве, может выполнять одну из трех возможных ролей: 1) водитель, 2) пользователь, готовый к ЗВД-ЗУД или 3) пассажир. Удаленный пользователь данного транспортного средства (т.е. тот, который при использовании транспортного средства не находится на месте водителя) также может выполнять одну из трех возможных ролей в течение данной конкретной поездки: 1) удаленный водитель, 2) пользователь, готовый к ЗВД-ЗУД или 3) диспетчер беспилотного функционирования.
Таблица 3 - Роли пользователя при включенной системе автоматизации управления движением
Вид пользователя | Отсутствие автоматизации управления движением | Активный уровень автоматизации управления движением | ||||
Уровень 0 | Уровень 1 | Уровень 2 | Уровень 3 | Уровень 4 | Уровень 5 | |
Пользователь, находящийся в транспортном средстве | Водитель | Пользователь, готовый к ЗВД-ЗУД | Пассажир | |||
Удаленный пользователь | Удаленный водитель | Пользователь, готовый к ЗВД-ЗУД | Диспетчер беспилотного функционирования | |||
Примечание - Транспортное средство, оснащенное АСУД 4-го или 5-го уровня, также может допускать роль водителя. Например, для выполнения поездки пользователь транспортного средства, оснащенного АСУД уровня 4, которая предназначена для управления транспортным средством в условиях высокоскоростного движения по автомагистрали, берет на себя выполнение ЗУД при съезде с автомагистрали; в противном случае АСУД автоматически выполнит ЗВД-ЗУД для достижения условия минимизации рисков. Однако, в отличие от случая системы 3-го уровня, в данном случае пользователь не должен быть пользователем, готовым к ЗВД-ЗУД, когда АСУД работает. | ||||||
5 Уровни и категории автоматизации управления движением
Как было показано выше, уровень автоматизации управления движением зависит от функциональности АСУД, определяемой разделением ролей между системой и пользователем (человеком, если таковой имеется) в выполнении ЗУД и ЗВД-ЗУД. Производитель АСУД определяет требования, предъявляемые данной системой, условия эксплуатации (УЭ) и рабочие характеристики, включая уровень автоматизации управления движением в соответствии с определениями, приводимыми ниже. Производитель также определяет требования к эксплуатации данной системы.
Два нижних уровня автоматизации управления движением (1 и 2) соответствуют случаям, в которых водитель (человек) продолжает выполнять часть ЗУД, когда система автоматизации управления движением включена.
Три верхних уровня автоматизации управления движением (3 и 5) соответствуют случаям, в которых АСУД, будучи включенной, выполняет полную ЗУД в длительном режиме.
5.1 Уровень или категория 0 - автоматизация управления движением отсутствует
Вся ЗУД выполняется водителем, даже при наличии помощи со стороны систем активной безопасности.
5.2 Уровень или категория 1 - помощь водителю
АСУД осуществляет управление либо скоростью, либо траекторией транспортного средства (но не обоими одновременно) в длительном режиме в определенных УЭ, подразумевая, что водитель выполняет оставшуюся часть ЗУД.
Примечание - Функция 1-го уровня, выполняющая подзадачу ЗУД, связанную с управлением скоростью или продольным движением транспортного средства, способна осуществлять РОСР только в пределах тех координатных осей, в которых она работает (продольной или поперечной), в связи с чем АСУД не может распознавать некоторые события и реагировать на них. Поэтому водитель должен осуществлять контроль работы АСУД, выполняя РОСР (подзадача ЗУД) и управление движением транспортного средства в координатных осях, не контролируемых АСУД (см. рисунок А.1, иллюстрирующий три первичные подзадачи ЗУД).
5.3 Уровень или категория 2 - частичная автоматизация управления движением
АСУД осуществляет управление скоростью и траекторией транспортного средства в длительном режиме в определенных УЭ, подразумевая, что водитель выполняет подзадачу РОСР и контролирует работу АСУД.
Примечание - Функция автоматизации управления движением 2-го уровня может выполнять РОСР только в ограниченном объеме, в связи с чем АСУД не способна распознавать некоторые события и реагировать на них. Поэтому водитель контролирует работу АСУД, выполняя подзадачу РОСР (см. рисунок А.1, иллюстрирующий три первичные подзадачи ЗУД).
5.4 Уровень или категория 3 - условная автоматизация управления движением
АСУД выполняет полную ЗУД в длительном режиме в определенных УЭ, подразумевая, что пользователь, готовый к ЗВД-ЗУД, восприимчив к запросам АСУД на вмешательство, а также к системным сбоям, связанным с выполнением ЗУД, в других системах транспортного средства и реагирует на их возникновение должным образом.
Примечания
1 Пользователь, готовый к ЗВД-ЗУД, не должен контролировать работу АСУД 3-го уровня, когда она активна, но при этом должен быть готов либо принять на себя выполнение ЗУД, когда АСУД выдаст запрос на вмешательство, либо выполнить ЗВД-ЗУД и условие минимизации рисков, если возникший сбой препятствует нормальной работе ТС.
2 Пользователь системы 3-го уровня, готовый к ЗВД-ЗУД, также должен быть восприимчивым к явным системным сбоям, связанным с выполнением ЗУД, которые могут не вызывать запроса на вмешательство со стороны АСУД, как, например, поломки элементов кузова или деталей подвески.
3 При возникновении в АСУД 3-го уровня системного сбоя, связанного с выполнением ЗУД, или при приближении АСУД к границам УЭ, АСУД выдает запрос на вмешательство за время, достаточное для обычного/нормального человека, чтобы должным образом среагировать на возникшую ситуацию.
4 "Необходимая" реакция со стороны пользователя, готового к ЗВД-ЗУД, на запрос о вмешательстве может подразумевать выполнение условия минимизации рисков или продолжение управления транспортным средством после выключения АСУД.
Пример - Функция АСУД, способная выполнять полную ЗУД при низкоскоростном нерегулируемом движении в режиме "старт-стоп".
5.5 Уровень или категория 4 - высокая автоматизация управления движением
АСУД выполняет полную ЗУД и ЗВД-ЗУД в длительном режиме в определенных УЭ, не подразумевая реакции пользователя на запрос о вмешательстве.
Примечания
1 Пользователь не должен контролировать работу функции 4-го уровня или быть восприимчивым к запросу на вмешательство, если АСУД активна. АСУД 4-го уровня способна самостоятельно выполнять ЗВД-ЗУД или условие минимизации рисков, если пользователь не берет на себя выполнение ЗУД. Эта возможность автоматического выполнения ЗВД-ЗУД и условия минимизации рисков является главным отличием функций 4-го уровня от функций 3-го уровня. Это означает, что пользователь транспортного средства с работающей функцией 4-го уровня является пассажиром, который не должен реагировать на запросы о вмешательстве или на системные сбои, связанные с выполнением ЗУД.
2 Функции АСУД 4-го уровня могут быть предназначены для управления транспортным средством на протяжении полной поездки (например, функция для развозного транспорта, функционирующего в пределах закрытой территории предприятия), либо части поездки, которая выполняется в пределах УЭ. Например, для выполнения поездки пользователь транспортного средства, оснащенного функцией АСУД 4-го уровня, которая предназначена для управления транспортным средством в условиях высокоскоростного движения по автомагистрали, берет на себя выполнение ЗУД при съезде с автомагистрали; в противном случае АСУД автоматически выполнит ЗВД-ЗУД для достижения условия минимизации рисков. Однако, в отличие от случая системы 3-го уровня, в данном случае пользователь не должен быть пользователем, готовым к ЗВД-ЗУД, когда АСУД работает (см. пример 2 ниже).
Примеры
1 Функция АСУД 4-го уровня, способная выполнять полную ЗУД во время парковки без контроля со стороны водителя.
2 Функция АСУД 4-го уровня, способная выполнять полную ЗУД в длительном режиме при движении по автомагистрали (в пределах УЭ). (В данном примере подразумевается присутствие на месте водителя пользователя, который способен выполнять ЗУД, поскольку выполнение водителем ЗУД было необходимо до выезда на автомагистраль и будет необходимо после съезда с нее. Следовательно, упомянутая функция предупредит пользователя о необходимости принятия на себя управления транспортным средством незадолго до выхода из УЭ, но если пользователь не среагирует на это предупреждение, АСУД автоматически выполнит ЗВД-ЗУД и обеспечит условие минимизации рисков).
3 Диспетчер беспилотного функционирования может запускать в работу ТС-АСУД 4-го уровня, которое способно следовать по установленному маршруту в пределах географически ограниченной области (жилой район, военная база, университетский кампус).
5.6 Уровень или категория 5 - полная автоматизация управления движением
Система автоматизации управления движением выполняет полную ЗУД и ЗВД-ЗУД в длительном режиме без ограничения УЭ, не подразумевая реакции пользователя на запрос о вмешательстве.
Примечания
1 "Без ограничения УЭ" означает, что АСУД может управлять транспортным средством в любых дорожных условиях, позволяющих осуществлять управление движением. Это означает, например, что АСУД может управлять транспортным средством вне зависимости от погодных условий, времени суток или географических ограничений. Однако, могут быть условия, не позволяющие осуществлять управление движением, в которых АСУД не сможет выполнить поездку (например, снежная буря, затопленные дороги, гололед и т.д.) до тех пор, пока эти условия существуют. При возникновении таких условий АСУД выполнит ЗВД-ЗУД для достижения условия минимизации рисков (например, съехав на дорожную обочину и ожидая изменения окружающих условий).
2 В случае возникновения системного сбоя, связанного с выполнением ЗУД (в АСУД или в транспортном средстве), АСУД 5-го уровня автоматически выполняет ЗВД-ЗУД и условие минимизации рисков.
3 Пользователь не должен контролировать АСУД 5-го уровня, когда она включена, а также быть восприимчивым к ее запросам на вмешательство.
Пример - Транспортное средство с АСУД, которая, будучи запрограммированной на некоторый пункт назначения, способна управлять транспортным средством на протяжении всей поездки на дорогах общего пользования вне зависимости от начального и конечного пунктов, а также возникающих дорожных и погодных условий.
6 Значимость условий эксплуатации (УЭ)
В принципе роль системы автоматизации управления движением, осуществляемая в сотрудничестве с пользователем, в выполнении полной ЗУД или ее части не зависит от конкретных условий, в которых выполняется эта роль: например, конкретная реализация адаптивного круиз-контроля может быть предназначена для работы только при высоких скоростях, только при низких скоростях или при любых скоростях.
Однако с целью упрощения систематизация в настоящем стандарте сводит эти два признака (уровень и УЭ) в единый перечень уровней автоматизации управления движением. Уровни 1-4 предполагают ограничения УЭ. Напротив, уровень 5 не предполагает каких-либо ограничений УЭ (см. раздел 8.7).
Соответственно, точное определение функции (кроме уровня 5) требует указания как уровня автоматизации управления движением, так и УЭ. Как указано в 2.28, данная комбинация уровня автоматизации управления движением и УЭ называется условиями использования, т.е. данная функция соответствует данным условиям использования.
По причине наличия широкого диапазона УЭ на каждом уровне автоматизации управления движением может быть широкий диапазон функций (например, УЭ уровня 4 включает парковки, высокоскоростное движение, низкоскоростное движение, географические ограничения и т.д.). По этой причине в настоящем стандарте взаимные роли АСУД и пользователя описываются более подробно, чем атрибуты УЭ, определяющие данную функцию.
Понятие УЭ является важным для понимания того, что АСУД, которой оснащено ТС-АСУД, не обязательно является системой 5-го уровня. В отличие от АСУД 5-го уровня, АСУД 4-го уровня имеет ограниченные УЭ. Ограничения ТС-АСУД, связанные с географией и условиями окружающей среды, могут быть созданы условиями эксплуатации АСУД или эксплуатационными ограничениями самого транспортного средства.
Функции уровней 1-4 имеют ограничения УЭ. Эти ограничения отражают технические возможности систем автоматического управления движением. Например, двухрежимные АСУД-ТС 4-го уровня, работающие на специальных маршрутах с ограждениями, существуют уже длительное время в виде пассажирских транспортеров, в т.ч. в аэропортах. УЭ подобных транспортных средств достаточно просты, хорошо контролируются и физически ограничены (транспортное средство движется по жестко заданному маршруту, снабженному ограждениями, защищенному от внешних воздействий, погодных условий и т.д.) В этом случае высокоструктурированные и простые УЭ снижают техническую сложность обеспечения 4-го уровня автоматизации управления движением. Напротив, функция АСУД 3-го уровня, управляющая транспортным средством на дорогах общего пользования в сложных погодных условиях, технически является существенно более сложной в силу своих нетривиальных и слабоструктурированных УЭ.
УЭ для данной функции АСУД могут включать широкий набор параметров, определяющих ограничения этой функции в части ее работы в дорожных условиях, для которых она предназначена. Они включают показатели, относящиеся к такому широкому кругу эксплуатационных факторов, как типы дорог, погодные условия, освещенность, географические ограничения, а также наличие или отсутствие дорожной разметки, барьеров, разделительных полос и т.д. Таким образом, хотя данная конкретная функция АСУД имеет только одни УЭ, эти УЭ могут быть широкими и разнообразными. Несмотря на то, что УЭ могут состоять из целого ряда параметров, говорить о том, что данная функция АСУД имеет несколько УЭ, некорректно. Функция может работать в соответствии со своим назначением только в том случае, если все параметры, связанные с УЭ, удовлетворяют этому назначению.
Рисунки 3 и 4 иллюстрируют соотношение между УЭ и уровнями автоматизации управления движением.
|
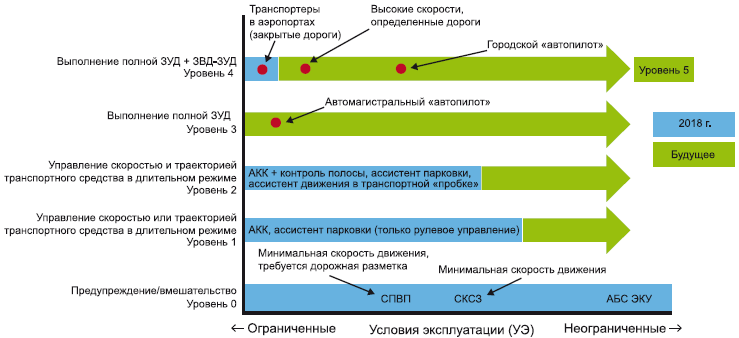
АКК - адаптивный круиз-контроль;
СПВП - система предупреждения о выходе из полосы (движения транспортного средства);
СКСЗ - система контроля "слепых" зон;
АБС - антиблокировочная система (тормозов);
ЭКУ - электронная система контроля устойчивости.
Рисунок 3 - Значимость соотношения между УЭ и уровнями автоматизации управления движением
|
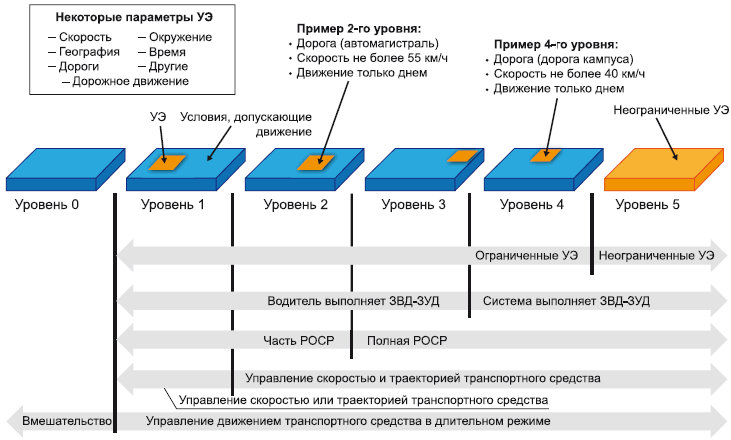
Рисунок 4 - Соотношение УЭ и уровней автоматизации управления движением
7 Нерекомендуемые термины
В целях внесения ясности в данном разделе представлены нерекомендуемые термины, которые не используются в настоящем стандарте, потому что они неточны (и поэтому вводят в заблуждение) и/или потому что они часто используются некорректно, будучи примененными к низким уровням автоматизации управления движением (уровням 1 и 2), на которых система автоматизации управления движением не выполняет полную ЗУД.
7.1 Термины "Автономные" (autonomous), "режимы вождения" (driving modes), "самоуправляемые" (self-driving), "без человека" (unmanned), "роботизированные" (robotic)
Данные разговорные термины иногда используются - неподходящим и вводящим в заблуждение образом - для обозначения систем автоматизации управления движением и транспортных средств, оборудованных ими. Поскольку автоматизация является способом использования электронных или механических устройств, заменяющих труд человека, в настоящем стандарте "автоматизация" (дополненная словом "управления движением") является подходящим термином для систем, которые выполняют полную ЗУД или ее часть. Использование других терминов может привести к путанице, неправильному пониманию и снижению доверия к терминологии.
7.1.1 Термин "Автономные" (Autonomous)
Данный термин в течение длительного времени используется в профессиональных кругах, связанных с исследованиями робототехники и искусственного интеллекта, для обозначения систем, которые наделены возможностями и "правом" принимать независимые и самодостаточные решения. Со временем использование этого термина само собой расширилось, охватив не только принятие решений, но и функциональность системы в целом, сделав термин "автономные" синонимом "автоматические". Данное использование термина делает неясным вопрос зависимости так называемых автономных транспортных средств (autonomous vehicle) от коммуникаций и взаимодействия с внешними объектами с целью выполнения важных функций (таких, как сбор информации). Некоторые системы автоматизации управления движением могут действительно быть автономными, если они выполняют все свои функции независимо и самодостаточно, но, если они зависят от коммуникаций и взаимодействия с внешними объектами, они должны рассматриваться не как автономные, а как взаимодействующие. В некоторых случаях разговорного употребления термин "автономные" ассоциируется с полной автоматизацией управления движением (уровень 5); в других же случаях термин применяется ко всем уровням автоматизации управления движением; есть примеры законодательства, где данный термин обозначает любую АСУД приблизительно 3-го уровня и выше (или любое транспортное средство, оснащенное такой АСУД).
Кроме того, в юриспруденции "автономность" означает способность к самоуправлению. В этом смысле ошибочно применять термин "автономная" к технологии автоматического управления движением, поскольку даже самые совершенные АСУД не являются самоуправляемыми. Работа АСУД базируется на алгоритмах и (во всем остальном) подчиняется командам пользователей.
По перечисленным причинам в настоящем стандарте для обозначения автоматизации управления движением не используется популярный термин "автономный".
7.1.2 Термин "Режимы вождения" (driving modes)
Ранее термин "режим вождения" использовался вместо термина "условия эксплуатации (УЭ)". Однако "режим вождения" является неточным термином и не включает многих условий, которые характеризуются УЭ. По этой причине не рекомендуется использовать термин "режим вождения" для описания УЭ функций АСУД.
7.1.3 Термин "Самоуправляемые" (Self-Driving)
Значение данного термина может меняться в зависимости от того, что подразумевается под словами "управление движением" и "водитель". Разнообразные употребления термина относятся к ситуациям, в которых отсутствует водитель, в которых пользователь не выполняет ЗУД и в которых система автоматизации управления движением выполняет какую-либо часть ЗУД.
7.1.4 Термин "Без человека" (Unmanned)
Данный термин часто используется некорректно для описания любого транспортного средства, оснащенного системой автоматизации управления движением уровня 2 и выше. Термин "без человека" подразумевает отсутствие человека в транспортном средстве, что также может создавать недопонимание, поскольку не отражает разницу между транспортным средством, управляемым удаленным водителем (человеком), и транспортным средством, управляемым АСУД, находящиеся в котором люди не имеют возможности управлять этим транспортным средством.
7.1.5 Термин "Роботизированные" (Robotic)
Данный термин иногда используется для обозначения автоматизации управления движением уровней 4 и 5 в случаях, например, ТС-АСУД, предназначенного для закрытых кампусов, или роботизированного такси, однако также является неясным, поскольку любая технология автоматизации может рассматриваться как "роботизация", но это не дает никакой полезной информации о рассматриваемой АСУД или транспортном средстве.
7.2 Термин "автоматизированное транспортное средство" (automated) или "автономное транспортное средство" (autonomous)
Настоящий стандарт не рекомендует использовать термины, которые называют объектом автоматизации транспортное средство, а не управление движением, поскольку это приводит к путанице между транспортными средствами, которые могут управляться водителем (человеком) или АСУД, и ТС-АСУД, которые создаются исключительно для работы под управлением АСУД. Использование этих терминов также не позволяет отличить другие формы автоматизации транспортных средств, которые не включают автоматизацию выполнения полной ЗУД или ее части.
Кроме того, конкретное транспортное средство может быть снабжено системой автоматизации управления движением, способной выполнять несколько функций автоматизации управления движением, которые работают на разных уровнях; следовательно, в каждом конкретном случае уровень автоматизации управления движением определяется активной в данный момент функцией(ями).
Таким образом, рекомендуется следующее описание транспортного средства с возможностью автоматизации управления движением: "транспортное средство, оснащенное системой автоматизации управления движением (1-го или 2-го уровня)" или "транспортное средство, оснащенное АСУД (3-го-5-го уровня)". Рекомендуется следующее описание транспортного средства с работающей системой (в отличие от системы, которая просто имеется в наличии): "транспортное средство с работающей системой автоматизации управления движением (1 или 2 уровня)" или "транспортное средство, управляемое АСУД (3-го-5-го уровня)".
7.3 Термины "Управление" (Control) и "вождение"
В разговорной речи термины "управление" и "вождение" иногда используются для описания ролей водителя (человека) или системы автоматизации управления движением (например, "водитель управляет", "управление транспортным средством", "неумелое вождение"). Поскольку термин "управление" имеет различные технические, правовые и обиходные значения, его использование без надлежащего уточнения может вносить путаницу, а не ясность. Например, термины "управление", "физическое управление" и "способность к управлению" могут иметь различные значения и быть мало связанными с инженерными системами управления. Утверждение, что водитель (человек) "не управляет", может быть ошибочно истолковано как потеря человеком контроля.
Предпочтительные термины "выполнение ЗУД" (см. 2.13) и "управлять движением (транспортного средства)" снижают вероятность путаницы путем конкретного указания, что делает водитель (человек) или система автоматизации управления движением в смысле выполнения полной ЗУД или ее части. В настоящем стандарте используются термины "управление траекторией (транспортного средства)" и "управление скоростью (транспортного средства)", которые четко определены как конкретные инженерные функции.
8 Дополнительные положения
8.1 Уровни не определяются экспериментальным путем, а назначаются и отражают техническую сущность функции системы автоматизации управления движением, заложенную ее разработчиком.
Не представляется возможным описать испытание или набор испытаний, которые могут применяться к функции АСУД для точной идентификации уровня автоматизации управления движением, к которому она относится. Присвоение уровня выражает предназначение функции, которое информирует потенциальных пользователей и другие заинтересованные стороны о том, что функция работает таким образом, что при ее включении роли водителя и системы автоматизации управления движением соответствуют назначенному уровню, определяемому настоящим стандартом. Назначение уровня обычно основывается на знании производителя об устройстве данной функции/системы, а также о ее разработке и тестировании - т.е. о факторах, формирующих уровень. Будущие пользователи информируются о возможностях и ограничениях данной функции АСУД различными способами, например, посредством руководства по эксплуатации, в котором приведено подробное описание функции, включая то, как ее следует и не следует использовать, каковы ее ограничения (если они имеются) и что делать (если это необходимо) в случае системного сбоя, связанного с выполнением ЗУД, если он произошел в системе автоматизации управления движением или в транспортном средстве.
Выявление функционального недостатка(ов) в системе автоматизации управления движением или ее неправильное использование не означают изменение ее уровня.
Примеры
1 Функция АСУД, которой производитель присвоил уровень 5, не понижает этот уровень до 4-го, столкнувшись с дорожной ситуацией, в которой она не может управлять транспортным средством.
2 Пользователь функции АСУД 3-го уровня, находящийся на месте водителя, считается пользователем, готовым к ЗВД-ЗУД, даже в том случае, если он уснул и, следовательно, перестал быть восприимчивым к запросам на вмешательство.
Уровень функции АСУД соответствует ее назначению, отраженному в ее устройстве. Это положение применимо вне зависимости от того, является ли оборудованное этой функцией транспортное средство серийным или экспериментальным. В этой связи, например, некорректно считать установленную в экспериментальном ТС функцию АСУД, по своему устройству соответствующую уровню 4, по факту относящейся к уровню 2 только потому, что в процессе ее тестирования водитель-испытатель должен осуществлять контроль работы этой функции и вмешаться, если этого требует обеспечение безопасности движения.
8.2 Назначаемые уровни являются эквивалентом названий, а не степени развития, и не могут быть дробными. Будучи числами от 0 до 5, уровни, описываемые в настоящем стандарте, тем не менее, не подразумевают иерархию потребительских качеств, технологического совершенства или порядок выпуска в производство. Например, настоящий стандарт не подразумевает, что уровень 4 "лучше", чем уровень 3 или 2.
Несмотря на то, что рабочий диапазон некоторых функций АСУД может быть относительно широким, например, если функция уровня 3 способна автоматически выполнять условие минимизации рисков в большинстве (но не во всех) условиях, которые можно предусмотреть в рамках ее УЭ, будет некорректно с точки зрения определений настоящего стандарта считать такую функцию условно или частично принадлежащей уровню 4. Также некорректно описывать уровни функций автоматизации управления движением с помощью дробных величин, таких как 2.5 или 4.7. Использование уровней, описываемых в настоящем стандарте как меры сравнения или дробных значений уровней, нарушит ясность их концепции, которая обеспечивается четким разделением "ролей" пользователя и системы автоматизации управления движением при выполнении ЗУД и ЗВД-ЗУД на данном транспортном средстве.
8.3 Уровни являются взаимоисключающими
В настоящей классификации уровни являются отличными друг от друга и взаимоисключающими. Это не позволяет присвоить функции больше одного уровня. Например, функция автоматизации управления низкоскоростным движением, которая, в соответствии с описанием производителя, способна выполнять полную ЗУД при затрудненном движении на регулируемых автомагистралях, не может быть одновременно 3-го и 4-го уровня, потому что она либо способна автоматически выполнять ЗВД-ЗУД и условие минимизации рисков, либо обращается (по крайней мере, в некоторых случаях) к водителю с запросом на вмешательство и последующее принятие водителем на себя выполнения ЗУД или выполнение им условия минимизации рисков.
Однако система автоматизации управления движением вполне может реализовывать функции различных уровней в зависимости от условий использования и/или предпочтений пользователя.
Например, транспортное средство может быть оснащено системой автоматизации управления движением, которая в различных условиях реализует функцию АКК 1-го уровня, функцию ассистента движения по автомагистрали 2-го уровня, функцию ассистента движения 3-го уровня при затрудненном дорожном движении и функцию автоматизированной парковки 4-го уровня, помимо этого, позволяя пользователю управлять транспортным средством на 0-м уровне при выключенных функциях автоматизации управления движением. С точки зрения пользователя эти различные функции включаются поочередно, а не одновременно, хотя система автоматизации управления движением может использовать одни и те же программные и аппаратные средства для реализации всех четырех функций.
8.4 Выполнение ЗУД, выполнение ЗВД-ЗУД и выполнение условия минимизации рисков являются различными функциями.
При рассмотрении реакции на системный сбой или выход за пределы условий эксплуатации для АСУД уровней 3, 4 или 5 настоящий стандарт различает следующие, отдельные друг от друга, функции:
а) выполнение ЗУД происходит при нормальной работе функции АСУД, то есть функция выполняет полную ЗУД, если она работает нормально в пределах своих УЭ (при наличии таковых);
б) выполнение ЗВД-ЗУД происходит, когда АСУД не в состоянии продолжать выполнение полной ЗУД. В случае функций АСУД 3-го уровня пользователь, готовый к ЗВД-ЗУД, должен среагировать на запрос о вмешательстве или на явную неисправность ТС, либо принимая на себя управление (если ТС работоспособно/управляемо), либо выполняя условие минимизации рисков (если ТС неработоспособно/неуправляемо). В случае АСУД уровней 4 и 5 функция или система выполняет ЗВД путем автоматического обеспечения условия минимизации рисков (например, перемещая ТС на дорожную обочину, включая аварийную сигнализацию, выключая двигатель и вызывая службу технической помощи). Некоторые функции уровня 3 могут быть способными в некоторых обстоятельствах автоматически выполнить ЗВД и условие минимизации рисков, например, при наличии ближайшей свободной от препятствий дорожной обочины; однако в других обстоятельствах, например, в случае отсутствия ближайшей свободной обочины, эти функции не способны выполнять указанные действия. Завершающей фазой выполнения ЗВД системой автоматического управления движением является перевод ТС в состояние, обеспечивающее выполнение условия минимизации рисков. Если же ЗВД выполняет пользователь, готовый к ЗВД-ЗУД, он может продолжить движение, приняв на себя управление ТС, вместо того чтобы выполнять условие минимизации рисков (если ТС работоспособно/управляемо);
в) для выполнения условия минимизации рисков требуется, чтобы АСУД была работоспособной после возникновения системного сбоя, связанного с выполнением ЗУД, или выхода ТС за границы УЭ. Если АСУД неработоспособна, необходимо задействовать стратегию смягчения последствий сбоев (см. подраздел 8.5). Условие минимизации рисков зависит как от состояния ТС, так и от внешних условий, которые имеют место во время ЗВД. В этой связи условие может выполняться в режиме оценки относительных рисков, связанных с продолжением работы/движения, перемещением ТС за пределы дороги или простой остановкой ТС.
8.5 ЗВД-ЗУД и стратегия смягчения последствий сбоев
Транспортные средства, оснащенные функциями автоматизации управления движением уровней 2 и 3, могут иметь дополнительную стратегию смягчения последствий сбоев, предназначенную для того, чтобы остановить ТС, если пользователь не осуществляет контроль работы функции (в случае уровня 2), или если пользователь, готовый к ЗВД-ЗУД, не выполняет ЗВД после соответствующего запроса (уровень 3). Например, если готовый к ЗВД-ЗУД пользователь функции 3-го уровня, предназначенной для управления ТС в условиях затрудненного дорожного движения, не отвечает на запрос о вмешательстве при выходе из области затрудненного движения (выход за границы УЭ), то может быть задействована стратегия смягчения последствий сбоев, которая остановит ТС в текущей полосе движения и включит аварийную сигнализацию. Рисунок 5 иллюстрирует последовательность действий в данной ситуации.
|
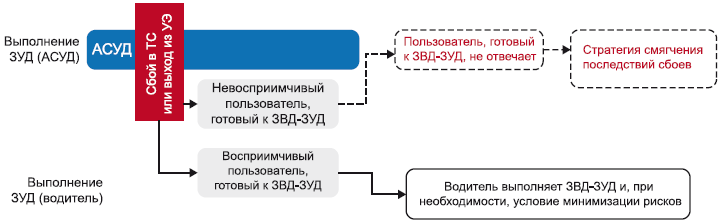
Рисунок 5 - Последовательность действий для работающей функции АСУД 3-го уровня при возникновении сбоя или при выходе из УЭ в случаях, когда пользователь, готовый к ЗВД-ЗУД, выполняет ЗВД или не выполняет ее, в результате чего задействуется стратегия смягчения последствий сбоев в виде, например, остановки ТС (пунктирные линии относятся к стратегии смягчения последствий сбоев)
ТС, оснащенные АСУД 4-го и 5-го уровней, также могут иметь стратегию смягчения последствий сбоев, заключающуюся в остановке ТС в специальных случаях серьезных сбоев, которые вызывают выход АСУД из строя, например, при отказе и основного, и вспомогательного источников питания или при отказе вычислительной части АСУД, не позволяющем ей выполнять ЗВД и условие минимизации рисков. Рисунок 6 иллюстрирует последовательность действий в данной ситуации.
|
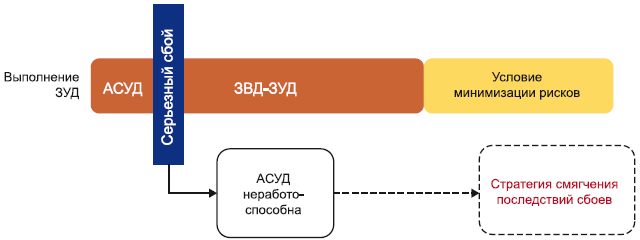
Рисунок 6 - Последовательность действий для работающей функции АСУД 4-го уровня в случае возникновения серьезного сбоя (например, полного отказа систем энергоснабжения ТС) и в случае, когда система выполняет условие минимизации рисков
В случае АСУД уровней 4 и 5 смягчение последствий сбоев отличается от условия минимизации рисков и не является частью функции ЗВД, поскольку задействуется при выключении АСУД или ее отказе из-за серьезного сбоя. В этой связи данный вопрос находится за пределами области применения настоящего стандарта.
8.6 Уровень 5 ("полная автоматизация управления движением") является противоположностью уровня 0 ("автоматизация управления движением отсутствует").
В соответствии с положениями настоящего стандарта уровень 5 отличается от уровня 4 тем, что его работоспособность не ограничена какими-либо условиями эксплуатации и распространяется на любые дорожные условия, в которых опытный водитель-человек может адекватно управлять транспортным средством.
Например, считать, что АСУД-ТС 4-го уровня, предназначенное для низкоскоростного движения в пределах ограниченной области центра города, является полностью автоматизированным, некорректно. Это подчеркивает факт того, что для пользователя, неспособного к управлению ТС, средством передвижения, обеспечивающим все его транспортные нужды, может быть только ТС, оснащенное АСУД 5-го уровня, которое выполняет те же задачи, что и традиционное ТС, управляемое квалифицированным водителем-человеком.
8.7 Практические соображения относительно уровня 5
Хотя уровень 5 подразумевает возможность АСУД работать в любых дорожных условиях, фактические условия эксплуатации ТС, оснащенного системой этого уровня, могут быть ограничены законодательством конкретной страны, которая не допускает перемещение ТС этого типа на своей территории.
8.8 Запрос пользователя на выполнение ЗУД при включенной АСУД 3-5 уровня
Включенная функция АСУД 3-го уровня должна передавать выполнение ЗУД пользователю, готовому для ЗВД-ЗУД, при получении от него соответствующего запроса. Это положение является логическим следствием того, что пользователь, готовый для ЗВД-ЗУД, должен быть способен выполнить ЗВД-ЗУД, когда это необходимо, включая случаи возникновения в транспортном средстве системных сбоев, связанных с выполнением ЗУД, которые не могут быть обнаружены АСУД (например, поломка элемента подвески).
Некоторые транспортные средства, оснащенные функциями автоматизации управления движением 4-го или 5-го уровня (а именно ТС-АСУД), могут не допускать передачу управления водителю. В транспортных средствах этого типа пассажиры могут быть обеспечены средствами требования остановки, например, рычагом аварийной остановки, в ответ на использование которых АСУД должна выполнить условие минимизации рисков.
Другие транспортные средства, оснащенные функциями автоматизации управления движением 4-го или 5-го уровня, могут допускать передачу управления водителю (т.е. понижение уровня вплоть до 0). В транспортных средствах данного типа управление может быть передано пользователю по его запросу, а не по запросу АСУД о вмешательстве. В этих случаях АСУД может выполнять передачу выполнения ЗУД с задержкой, чтобы обеспечить плавность перехода выполнения ЗУД к водителю или для предотвращения опасных ситуаций.
Примеры
1 Транспортное средство находится под управлением функции автомагистрального пилота АСУД 4-го уровня, которая выполняет интенсивный маневр входа в поворот и не может немедленно выключиться по запросу пользователя, а вместо этого выключается постепенно по мере того, как пользователь с помощью рулевого колеса показывает, что он полностью перешел к выполнению ЗУД.
2 Функция АСУД 4-го уровня, предназначенная для управления транспортным средством при высокоскоростном движении в колонне с малыми интервалами между транспортными средствами, после получения запроса пользователя на передачу управления может задерживать выполнение этого запроса до тех пор, пока она не осуществит безопасный выход транспортного средства из колонны, поскольку водитель (человек) может быть не в состоянии безопасно управлять транспортным средством в таком плотном потоке.
8.9 Возможная автоматизация некоторых стратегических аспектов управления движением
Стратегические аспекты управления движением транспортного средства (принятие решения о совершении поездки, пункте назначения поездки и выбор пути) не включены в определение ЗУД, поскольку они считаются аспектами более широкой задачи управления движением, определяемыми пользователем. Однако в некоторых продвинутых вариантах применения АСУД, таких как ТС-АСУД, планирование временной длительности и маршрута поездки и даже выбор пункта назначения могут быть автоматизированы в соответствии с критериями, которые задает пользователь (т.е. диспетчер беспилотного функционирования) или диспетчерский центр.
8.10 Управление ТС и ЗУД
Управление ТС подразумевает принятие множества решений и выполнение множества действий как при движении транспортного средства, в том числе в транспортном потоке, так и при неподвижном транспортном средстве. В процедуре управления движением ТС можно выделить три типа действий водителя: стратегические, тактические и управляющие. Стратегические действия состоят в планировании поездки, включая вопросы "когда ехать", "куда ехать", "как ехать", выбор наилучшего маршрута и т.д. Тактические действия связаны с маневрированием транспортного средства и включают решения об обгоне других транспортных средств или о смене полосы движения, выбор скоростного режима, наблюдение с помощью зеркал и т.д. Управляющие действия связаны с быстрыми реакциями, которые можно рассматривать как предсознательные, включая корректирующие движения рулевым колесом, замедления и ускорения, которые направлены на сохранение полосы движения, предотвращение столкновения с препятствиями и избежание других опасных ситуаций на пути следования транспортного средства.
Определение ЗУД (2.13) включает тактические и управляющие действия и не включает стратегические. Входящие в ЗУД действия подразумевают управление движущимся или начинающим движение транспортным средством в транспортном потоке. Используемые определения терминов "стратегический", "тактический" и "управляющий" соответствуют целям настоящего стандарта и в других контекстах могут пониматься иначе. Таким образом, настоящий стандарт дает определение термина "управлять", которое включает как управляющие, так и тактические действия.
Операции обнаружения, распознавания и классификации объектов и событий, а также реакций на них РОСР формируют набор действий, который как правило упоминается в соответствующей литературе. В случае систем автоматизации управления движением РОСР также включает события, связанные с действиями и результатами действий системы, например, с необнаруженными ошибками или сменой состояний.
8.11 Функции предотвращения столкновений, которыми снабжены некоторые традиционные транспортные средства, предназначенные для управления человеком, входят в состав АСУД.
Функции предотвращения столкновений, включая системы активной безопасности, могут входить в состав систем автоматизации управления движением. Для ТС, оснащенных АСУД, которые выполняют полную ЗУД (т.е. для уровней 3-5), функции предотвращения столкновений являются частью АСУД.
Приложение А
(справочное)
Блок-схема ЗУД
|
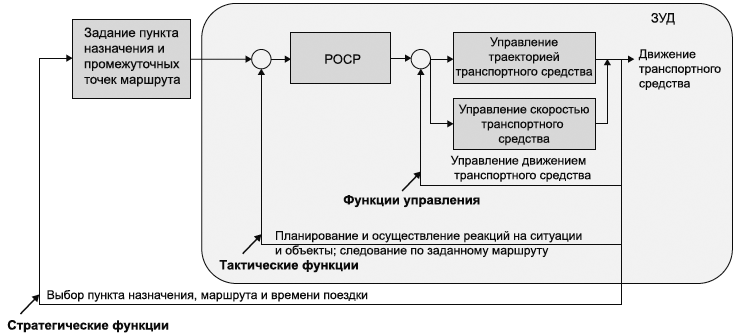
Рисунок А.1 - Блок-схема ЗУД как составной части общей задачи управления движением ТС
В рамках выполнения ЗУД уровень 1 подразумевает автоматизацию части функций, входящих во внутренний контур управления (либо управление траекторией транспортного средства, либо управление скоростью транспортного средства, а также РОСР, в том объеме, который требуется для выполнения одной из двух функций управления движением транспортного средства); уровень 2 подразумевает автоматизацию всех функций, входящих во внутренний контур управления (управление траекторией транспортного средства и управление скоростью транспортного средства, а также РОСР, в том объеме, который требуется для выполнения этих двух функций управления движением транспортного средства); уровни 3-5 подразумевают автоматизацию функций во всех контурах управления (управление траекторией транспортного средства и управление скоростью транспортного средства, а также РОСР, в полном объеме). Следует отметить, что выполнение ЗУД не включает стратегические аспекты управления движением (т.е. определение пункта назначения и времени осуществления поездки).
Приложение Б
(справочное)
Схемы последовательности событий ЗВД-ЗУД для различных уровней автоматизации управления движением
|
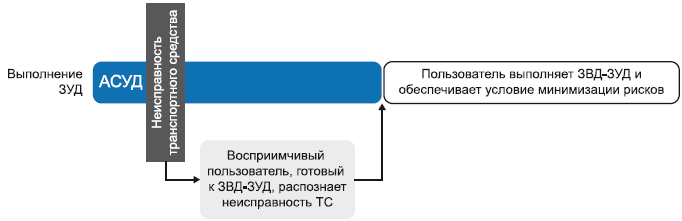
Рисунок Б.1 - Последовательность событий в системе 3-го уровня: АСУД активна, в транспортном средстве происходит системный сбой, не позволяющий продолжать выполнение ЗУД. Пользователь выполняет ЗВД и условие минимизации рисков
|
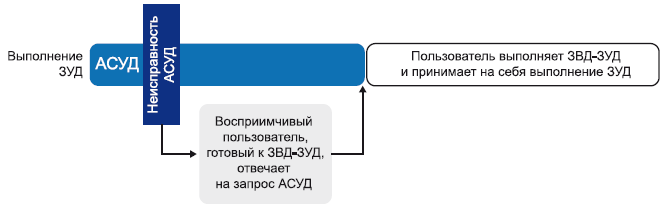
Рисунок Б.2 - Последовательность событий в системе 3-го уровня: АСУД активна, в АСУД происходит системный сбой, не препятствующий продолжению выполнения ЗУД. Пользователь выполняет ЗВД и принимает на себя выполнение ЗУД
|
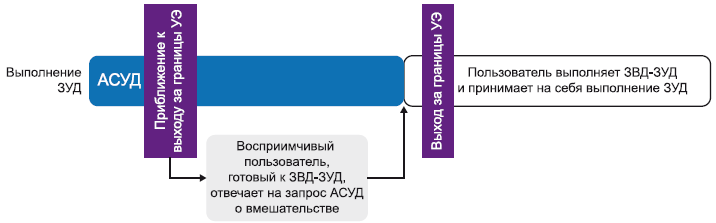
Рисунок Б.3 - Последовательность событий в системе 3-го уровня: АСУД активна, происходит выход за границы УЭ, не препятствующий продолжению выполнения ЗУД. Пользователь выполняет ЗВД и принимает на себя выполнение ЗУД
|
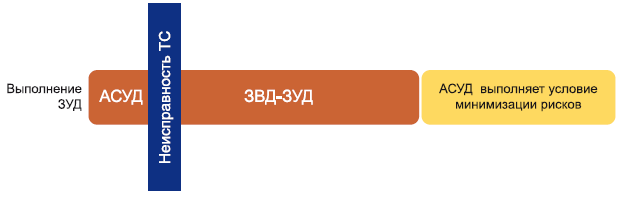
Рисунок Б.4 - Последовательность событий в системе 4-го уровня: АСУД активна, в ТС происходит системный сбой, не позволяющий продолжать выполнение ЗУД. АСУД выполняет ЗВД и условие минимизации рисков
|
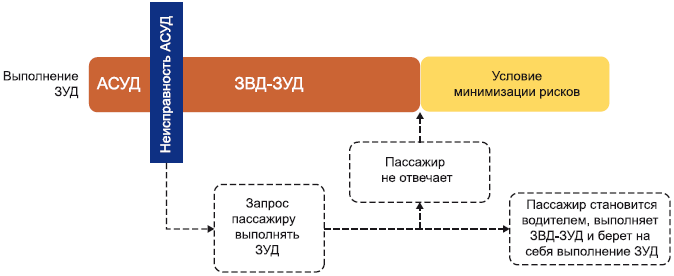
Примечание - Пунктирные линии означают необязательные условия.
Рисунок Б.5 - Последовательность событий в системе 4-го уровня: АСУД активна, в АСУД происходит сбой, не препятствующий продолжению выполнения ЗУД присутствующим пользователем-человеком. Функция АСУД может направить пассажиру, находящемуся на месте водителя, запрос о принятии на себя выполнения ЗУД; если таковой пассажир отсутствует, АСУД автоматически выполняет условие минимизации рисков
|
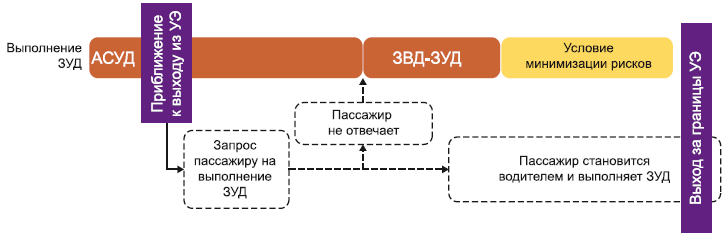
Рисунок Б.6 - Последовательность событий в системе 4-го уровня: АСУД работает, происходит выход за границы УЭ, не препятствующий продолжению выполнения ЗУД присутствующим пользователем-человеком. Функция АСУД может направить пассажиру, находящемуся на месте водителя, запрос о принятии на себя выполнения ЗУД; если таковой пассажир отсутствует, АСУД автоматически выполняет условие минимизации рисков
Библиография
[1] | SAE J 3016* | Таксономия и определения терминов, относящихся к автоматизированным системам вождения автотранспортных средств на дорогах |
[2] | ISO 8855:2011* | Транспорт дорожный. Динамика транспортных средств и курсовая устойчивость. Словарь |
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
УДК 629:006.354 | ОКС 43.040 |
Ключевые слова: автомобильные транспортные средства, системы автоматизации управления движением, автоматические системы управления движением, функции, уровни, задачи, подзадачи, роли, пользователь | |
Электронный текст документа
и сверен по:
, 2020
{kind=link}