ГОСТ Р ИСО 22839-2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
СИСТЕМЫ СНИЖЕНИЯ ТЯЖЕСТИ ПОСЛЕДСТВИЙ ОТ СТОЛКНОВЕНИЯ С ДВИЖУЩИМСЯ ВПЕРЕДИ ТРАНСПОРТНЫМ СРЕДСТВОМ
Работа, эксплуатационные характеристики и требования к проверке
Intelligent transport systems. Forward vehicle collision mitigation systems. Operation, performance, and verification requirements
ОКС 43.040.15
Дата введения 2018-07-01
Предисловие
1 ПОДГОТОВЛЕН Закрытым акционерным обществом "НПП Транснавигация" на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 "Интеллектуальные транспортные системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 8 ноября 2017 г. N 1704-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 22839:2013* "Интеллектуальные транспортные системы. Системы снижения тяжести последствий от столкновения с движущимся впереди транспортным средством. Работа, эксплуатационные характеристики и требования к проверке" (ISO 22839:2013 "Intelligent transport systems - Forward vehicle collision mitigation systems - Operation, performance, and verification requirements", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт ИСО 22839:2013 разработан техническим комитетом ИСО/ТК 204 "Интеллектуальные транспортные системы".
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Системы снижения тяжести последствий от столкновения с движущимся впереди транспортным средством (FVCMS - Forward Vehicle Collision Mitigation Systems) снижают тяжесть последствий столкновения с движущимся впереди транспортным средством, которого нельзя избежать, и могут снизить вероятность столкновения с движущимся впереди транспортными средствами.
Для функционирования системе FVCMS необходима информация о расстоянии до движущегося впереди транспортного средства и параметрах его движения, параметрах движения оборудованного системой FVCMS транспортного средства, командах и действиях водителя. FVCMS обнаруживает движущееся впереди транспортное средство, определяет, исходит ли опасность от обнаруженного впереди транспортного средства, и предупреждает водителя, если таковая существует.
Система оценивает возможность водителя адекватно реагировать на опасность. Если времени для адекватной реакции водителя недостаточно и если соответствующие критерии выполняются, FVCMS определяет, что столкновение неизбежно. На основании этой оценки FVCMS приводит в действие тормоза транспортного средства для снижения тяжести столкновений.
|

Рисунок 1 - Функциональные элементы системы снижения тяжести последствий от столкновения с движущимся впереди транспортным средством (FVCMS)
Разработчики систем и другие пользователи данного международного стандарта могут применять его для автономных FVCMS или интеграции функций FVCMS в другие системы помощи и поддержки водителя.
1 Область применения
Настоящий международный стандарт определяет концепцию работы, минимальные функциональные характеристики, системные требования, системные интерфейсы и методы испытаний для системы снижения тяжести последствий от столкновения с движущимся впереди транспортным средством (FVCMS). Он определяет требования к поведению системы FVCMS и критерии испытаний системы, необходимые для проверки того, что конкретная реализация отвечает требованиям настоящего стандарта. Варианты применения, насколько возможно, оставлены системным проектировщикам.
FVCMS снижает последствия наезда транспортного средства, движущегося сзади. За счет уменьшения энергии столкновения системы FVCMS уменьшают степень повреждения транспортных средств, получения травмы или вероятность смертельного исхода. Они дополняют системы повышения устойчивости к удару, такие как подушки безопасности, ремни безопасности и другие, поглощающие энергию системы, за счет уменьшения энергии удара, который должен быть изолирован от пассажиров. При автоматической активации торможения для снижения тяжести последствий столкновения после возникновения предупреждения об опасности столкновения FVCMS помогает замедлить транспортное средство, когда столкновение неизбежно. В то же время, если предупреждения столкновения не требуется, данный международный стандарт разрешает выполнять попытку предупреждения столкновения с помощью системы, которая соответствует требованиям FVCMS. Ответственность за безопасную эксплуатацию транспортного средства остается за водителем.
Системы FVCMS могут использоваться на транспортных средствах, предназначенных для движения по дорогам общего пользования и других дорогах (за исключением двухколесных транспортных средств и грузовых автомобилей с двойными или тройными прицепами). Эти системы не предназначены для использования в условиях бездорожья.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты*. Для датированных ссылок применяют только указанное издание ссылочного стандарта. Для недатированных - последнее издание (включая все изменения к нему).
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 15622, Intelligent transport systems - Adaptive Cruise Control systems - Performance requirements and test procedures (Интеллектуальные транспортные системы. Системы адаптивного круиз-контроля. Требования к эксплуатационным характеристикам и методы испытания)
ISO 15623, Transport information and control systems - Forward vehicle collision warning systems - Performance requirements and test procedures (Интеллектуальные транспортные системы. Системы предупреждения столкновений с движущимся впереди транспортным средством. Требования к эксплуатационным характеристикам и методы испытания)
ISO 22179, Intelligent transport systems - Full speed range adaptive cruise control (FSRA) systems - Performance requirements and test procedures (Интеллектуальные транспортные системы. Системы адаптивного круиз-контроля во всем диапазоне скоростей. Требования к эксплуатационным характеристикам и методы испытания)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 адаптивный круиз-контроль АСС: Усовершенствованная система традиционного круиз-контроля, которая позволяет оборудованному данной системой транспортному средству следовать за движущимся впереди транспортным средством на соответствующем расстоянии путем управления двигателем, трансмиссией и при необходимости тормозами.
Примечание - См. ИСО 15622.
3.2 соседняя полоса: Полоса движения, имеющая одну общую границу с полосой, на которой двигается испытуемое транспортное средство, и имеющая то же направление движения, что и полоса, на которой двигается испытуемое транспортное средство.
3.3 автопоезд: Любое дорожное транспортное средство с более чем двумя колесами, которое приспособлено для использования на обычных дорогах, состоящее как минимум из двух сегментов, в котором каждая пара смежных сегментов соединена сочленением и в отношении которых привод обеспечивается по меньшей мере одним сегментом.
3.4 тормоза: Компонент, который создает силы, препятствующие движению транспортного средства.
Пример - Фрикционный тормоз (когда силы возникают в результате трения между двумя частями транспортного средства, движущимися относительно друг друга); электрический тормоз (когда силы возникают в результате электромагнитного взаимодействия между двумя частями транспортного средства, движущимися относительно друг друга, но не в контакте друг с другом); гидравлический тормоз (когда силы возникают в результате действия жидкости, находящейся между двумя частями транспортного средства, движущимися относительно друг друга); тормозная система двигателя (когда эти силы возникают в результате искусственного увеличения тормозящего действия двигателя, передающегося на колеса).
3.5 тормозной путь: Расстояние, которое проходит транспортное средство с момента применения тормозов до полной остановки.
3.6 дистанция : Расстояние
от задней поверхности транспортного средства - цели до передней поверхности испытуемого транспортного средства.
|
3.7 предупреждение столкновения CW: Информация, формируемая системой FVCMS для водителя, чтобы показать необходимость экстренного реагирования с целью избежать столкновения.
Замечание - Данное предупреждение формируется с целью предупреждения водителя о необходимости выполнения экстренного маневра, чтобы избежать столкновения.
3.8 обычный круиз-контроль: Система, способная поддерживать установленную водителем скорость транспортного средства.
3.9 точка активации контрмер САР: Значение параметра, формируемое в ситуации перед столкновением (PUP) и относящееся к возможному столкновению, при котором FVCMS инициирует ответные меры.
3.10 выключение водителем: Инициируемый водителем перевод системы FVCMS из активного или неактивного состояния в состояние "Выключено".
3.11 увеличенное время до столкновения ЕТТС: Время, которое потребуется транспортному средству до столкновения с транспортным средством - целью в предположении, что относительное ускорение между испытуемым транспортным средством (SV) и транспортным средством - целью остается постоянным, как показано в следующем уравнении:
 .
.
3.12 примыкающее движущееся впереди транспортное средство: Транспортное средство, находящееся не на пути испытуемого транспортного средства (SV), и полностью впереди линии, перпендикулярной продольной оси данного транспортного средства, касающейся переднего бампера испытуемого транспортного средства только в одной точке.
3.13 датчик системы измерения расстояния до движущегося впереди транспортного средства: Компонент, который обнаруживает объекты по меньшей мере в части области исключительно впереди переднего бампера транспортного средства.
3.14 движущееся впереди транспортное средство FV: Транспортное средство впереди испытуемого транспортного средства, которое двигается в том же направлении и по тому же пути или ориентированное в том же направлении, если оно не двигается.
3.15 столкновение с движущимся впереди транспортным средством: Столкновение между испытуемым транспортным средством (SV) и движущимся впереди транспортным средством (TV).
3.16 система снижения последствий от столкновения с движущимся впереди транспортным средством FVCMS: Система для транспортных средств, удовлетворяющая требованиям стандарта ИСО 22839, которая оценивает вероятность столкновения между передней частью испытуемого транспортного средства (SV) и задней частью движущегося впереди транспортного средства - цели (TV) и, если вероятность столкновения велика, автоматически приводит в действие тормоза для уменьшения величины относительной скорости, при которой эти транспортные средства могут столкнуться.
3.17 система предупреждения столкновения с движущимся впереди транспортным средством FVCWS: Система, способная предупреждать водителя о возможном столкновении с транспортным средством впереди, находящимся на пути его транспортного средства, исключая ситуации, когда транспортные средства двигаются не в одном направлении.
Примечание - См. ИСО 15623.
3.18 тяжелое транспортное средство: Любое отдельное транспортное средство или комбинация транспортных средств, относящиеся к категории 1-2 или категории 2 в соответствии с правилами Экономического и социального совета мирового форума по гармонизации транспортных средств (WP.29) TRANS/WP.29/1045.
3.19 рывок: Третья производная функции расстояния объекта по времени, эквивалентная скорости изменения ускорения объекта; рассматривается как мера резкости движения транспортного средства.
3.20 боковое смещение: Поперечное расстояние между продольными осями испытуемого транспортного средства (SV) и транспортного средства цели - (TV), измеряемое в процентах от ширины испытуемого транспортного средства, такое, что если центры двух транспортных средств выравниваются, значение поперечного расстояния становится равным нулю.
|

3.21 легкое транспортное средство: Любое отдельное транспортное средство или комбинация транспортных средств, относящиеся к категории 1-1 в соответствии с правилами Экономического и социального совета Мирового форума по гармонизации транспортных средств (WP.29) TRANS/ WP.29/1045.
3.22 смягчающее торможение MB: Реакция системы FVCMS в ответ на обнаружение высокой вероятности столкновения с движущимся впереди транспортным средством путем автоматической активации торможения для быстрого уменьшения величины относительной скорости до требуемого минимума.
3.23 точка принятия минимально необходимых контрмер МСАР: Значение параметра PUP, относящееся к ожидаемому столкновению и при котором следует принять определенные ответные меры.
3.24 минимальное замедление FVCMS: Минимальная величина торможения системой FVCMS (которое должно обеспечиваться системой при уменьшающем последствия торможении), измеренное на сухом ровном и чистом покрытии.
3.25 минимальная скорость : Минимальная скорость испытуемого транспортного средства (SV), при которой система FVCMS должна иметь способность выполнить ответные меры.
3.26 отмена: Водитель инициирует приостановку действия контрмер MB, SRB или CW.
3.27 параметр опасности столкновения PUP: Параметр, формируемый в режиме реального времени, указывающий на опасность возможного предстоящего столкновения.
3.28 столкновение с движущимся впереди транспортным средством: Столкновение с движущимся впереди транспортным средством, при котором передняя часть транспортного средства ударяет в заднюю часть движущегося впереди транспортного средства.
3.29 относительная скорость : Разность продольной скорости между испытуемым транспортным средством (SV) и транспортным средством - целью (TV)
, заданная уравнением, положительное значение которой свидетельствует о том, что транспортное средство - цель двигается быстрее, чем испытуемое транспортное средство, и поэтому зазор увеличивается стечением времени.
![]() .
.
3.30 требуемое замедление: Минимальное значение замедления, которое (при его постоянном значении) обеспечит возможность испытуемому транспортному средству адаптироваться к скорости транспортного средства - цели без контакта с ним и таким образом предотвратить столкновение.
3.31 одноколейное транспортное средство: Транспортное средство, которое оставляет одну колею при своем движении вперед.
Примечание - Одноколейное транспортное средство в стационарном состоянии обычно имеет небольшую боковую устойчивость (или ее отсутствие), но приобретает ее при движении вперед или когда управляется.
3.32 снижение скорости торможением SRB: Контрмера системы FVCMS, которая снижает скорость испытуемого транспортного средства путем приведения в действие тормозов, предоставляя водителю время для анализа и реакции на потенциальное столкновение, и которая также может иметь дополнительный эффект привлечения внимания водителя испытуемого транспортного средства к опасности впереди.
3.33 испытуемое транспортное средство SV: Транспортное средство, оборудованное системой FVCMS, которая определена настоящим документом.
3.34 транспортное средство - цель TV: Движущееся впереди транспортное средство, находящееся на расстоянии обнаружения датчиком измерения расстояния до движущихся впереди транспортных средств, установленным на испытуемом транспортном средстве (SV).
3.35 временной интервал: Значение интервала времени, рассчитанное в зависимости от скорости транспортного средства и величины дистанции по формуле
временной интервал = дистанция / скорость транспортного средства.
3.36 время до столкновения ТТС: Оценка значения интервала времени до столкновения испытуемого транспортного средства с транспортным средством - целью в предположении, что текущая относительная скорость останется неизменной, рассчитывается по формуле
![]() .
.
3.37 седельный тягач: Тяжелое транспортное средство на одном шасси, включающее двигатель, движитель, систему управления и рабочее место водителя, с целью управление и транспортировки одного или более отдельных грузовых прицепов.
3.38 тягач: Тяжелое транспортное средство на одном шасси, имеющее собственный двигатель и движитель, систему управления и рабочее место водителя, грузовую секцию или другую секцию для коммерческого груза.
3.39 предупреждающее торможение WB: Действие - реакция системы FVCMS при обнаружении возможного столкновения с движущимся впереди транспортным средством путем автоматического приведения в действие тормозов для предупреждения водителя.
4 Обозначения
- ускорение транспортного средства - цели; | |
- ускорение испытуемого транспортного средства; | |
ABS | - система предотвращения блокировки колес транспортного средства при торможении; |
АСС | - адаптивный круиз-контроль; |
САР | - точка активации контрмер; |
СТТ | - коэффициент отражения цели испытаний; |
CW | - предупреждение столкновения; |
- замедление транспортного средства - цели; | |
- замедление испытуемого транспортного средства; | |
- максимальное расстояние обнаружения; | |
- минимальное расстояние обнаружения транспортного средства при боковом смещении; | |
- минимальное расстояние обнаружения транспортного средства, при котором возможно его измерение; | |
- минимальное расстояние обнаружения транспортного средства без его измерения; | |
- верхний предел зоны обнаружения (расстояние от земли); | |
- нижний предел зоны обнаружения (расстояние от земли); | |
ECU | - электронный блок управления; |
ESC | - электронный контроль устойчивости; |
ЕТТС | - увеличенное время до столкновения; |
FV | - движущееся впереди транспортное средство; |
FVCWS | - система предупреждения столкновения с движущимся впереди транспортным средством; |
FVCMS | - система снижения тяжести последствий от столкновения с движущимся впереди транспортным средством; |
MB | - смягчающее торможение; |
| - точка принятия минимально необходимых контрмер для смягчающего торможения; |
| - точка принятия минимально необходимых контрмер для снижения скорости торможением; |
| - точка принятия минимально необходимых контрмер для предупреждения о столкновении; |
PUP | - параметр актуальности будущего столкновения; |
RCS | - поперечное сечение радара; |
RSC | - электронный контроль устойчивости; |
SRB | - снижение скорости торможением; |
SV | - испытуемое транспортное средство; |
ТТС | - время до столкновения; |
TV | - транспортное средство цель; |
- минимальная скорость испытуемого транспортного средства, при которой работоспособна система FVCMS; | |
| - скорость движения испытуемого транспортного средства; |
- относительная скорость движения между испытуемым транспортным средством и транспортным средством - целью; | |
| - скорость движения транспортного средства - цели; |
- максимальная скорость испытуемого транспортного средства, при которой работоспособна система FVCMS; | |
WB | - предупреждающее торможение; |
- ширина испытуемого транспортного средства; | |
- ширина полосы; | |
- дистанция. Расстояние между испытуемым транспортным средством и транспортным средством - целью. |
5 Классификация
Этот пункт содержит вводную информацию, которая объясняет различные классификации FVCMS, охватываемые настоящим стандартом. Этот пункт не предназначен для определения требований. Все требования настоящего международного стандарта изложены в разделах 6 и 7.
5.1 Классификация систем по возможности их функционирования на непрямолинейных участках дорог в зависимости от радиуса кривизны участка
Системы классифицируются в соответствии с возможностями функционирования на непрямолинейном участке дороги, как показано в таблице 1.
Таблица 1 - Классификация систем
Класс | Возможность функционирования на непрямолинейном участке в зависимости от его радиуса кривизны в плане |
I | Радиус кривизны больше или равен 500 м |
II | Радиус кривизны больше или равен 250 м |
III | Радиус кривизны больше или равен 125 м |
Системы класса I должны иметь возможность обнаружения транспортных средств впереди на непрямолинейном участке дороги с радиусом кривизны до 500 метров.
Системы класса II должны иметь возможность обнаружения транспортных средств впереди на непрямолинейном участке дороги с радиусом кривизны до 250 метров.
Системы класса III должны иметь возможность обнаружения транспортных средств впереди на непрямолинейном участке дороги с радиусом кривизны до 125 метров.
5.2 Классификация по типам имеющихся контрмер
Классификация FVCMS может быть выполнена по составу обеспечивающих контрмер. Классификация базируется на минимальных ответных мерах системы, а также дополнительных ответных мерах, которые могут быть применены системой. Для каждой контрмеры установлено минимальное значение ассоциированного с ней параметра действия (МСАР). FVCMS активирует ответную меру тогда, когда значение параметра актуальности будущего столкновения (PUP) становится по меньшей мере равным минимальному значению параметра действия для этой ответной меры.
5.2.1 Контрмера "Предупреждение об опасности столкновения" (CW)
Предупреждения об опасности столкновения является предупреждением, формируемым на основе использования некоторой комбинации звуковых, визуальных и тактильных или сенсорных режимов, отвечающих требованиям стандарта ИСО 15623 для рабочего диапазона FVCMS, как показано на рисунке 4.
Контрмера "Предупреждение об опасности столкновения" не должна выполняться позднее инициализации SRB или MB.
5.2.2 Контрмера "Уменьшение скорости торможением" (SRB)
Снижение скорости торможением является функцией автоматического торможения, предназначенной для снижения скорости транспортного средства. SRB дает водителю улучшенную возможность применить ручное экстренное торможение, чтобы сменить аварийную полосу движения или определить, что никакой опасности нет и выключить SRB. Любое из этих действий может предотвратить активацию смягчающего торможения. Для того чтобы помочь пассажирам подготовиться к данному событию торможения, применению SRB предшествует контрмера "Предупреждение об опасности столкновения".
Контрмера "Предупреждение об опасности столкновения" не должна выполняться позднее инициализации MB.
5.2.3 Контрмера "Смягчающее торможение" (MB)
Смягчающее торможение - это автоматическое торможение, которое применяется в случае, когда столкновение кажется неизбежным. Контрмера MB активируется, если значение PUP по меньшей мере равно пороговому значению ![]() .
.
Активация ответной меры "Смягчающее торможение" будет иметь последствие, которое является менее вредным, чем последствия столкновения SV и TV без применения данной ответной меры. В некоторых случаях это может также привести к автоматическому предотвращению столкновения. Пиковые значения ускорения и рывка ограничиваются конструкцией, состоянием систем транспортного средства и доступной тягой. Для оказания помощи пассажирам, чтобы подготовиться к этому торможению, активации MB будут предшествовать контрмера "Предупреждение о столкновении" и, как вариант, активация SRB.
5.2.4 Сочетание контрмер
Возможные конфигурации FVCMS представлены ниже, в таблице 2. Каждая строка представляет собой отдельный тип системы. Любые комбинации, которые не определены в этой таблице, не входят в рамки данного международного стандарта. Для каждого типа строка указывает, какие требуются ответные меры. Значение "1" указывает на то, что контрмера требуется, и "0" указывает на то, что контрмера не должна быть включена.
Таблица 2 - Допустимые конфигурации системы
Тип | MB | SRB | CW |
1 | 0 | 1 | 1 |
2 | 1 | 0 | 1 |
3 | 1 | 1 | 1 |
6 Требования
6.1 Минимум включаемых возможностей
Определение эксплуатационных характеристик FVCMS предполагает, что транспортное средство должно быть оснащено по крайней мере одним средством для достижения всех необходимых функций системы. Все FVCMS должны обеспечивать контрмеру CW в соответствии с ИСО 15623 для достижения набора функций FVCMS, как показано на рисунках 2 и 3.
6.1.1 Необходимые функции легкого транспортного средства
Легкое транспортное средство, оборудованное FVCMS, должно иметь способность выполнять следующие функции:
- определять наличие движущегося впереди транспортного средства;
- определять расстояние и относительную скорость между SV и обнаруженным впереди транспортным средством;
- определять скорость транспортного средства, оборудованного системой FVCMS;
- инициировать соответствующие ответные меры, когда боковое смещение менее 20%, даже если часть движущегося впереди транспортного средства закрыта от датчиков SV;
- обеспечивать предупреждение водителя в соответствии с требованиями FVCWS;
- активировать и регулировать тормозную систему, независимо от того тормозит водитель или нет;
- управлять стоп-сигналом;
- улучшать управление, осуществляемое водителем, на основе использования тормозов, за счет возможностей курсовой устойчивости и способностей управлять продольным скольжением колес, например в сочетании с системами ESC или RSC и при необходимости в сочетании с возможностями ABS;
- создавать хотя бы минимально требуемое от системы FVCMS замедление в ходе применения MB для системы типов 2 и 3;
- иметь возможность выполнить контрмеру SRB для системы типов 1 или 3;
- после инициализации ответной меры MB или SRB позволять водителю увеличить замедление до любого более высокого значения, вплоть до максимально возможного замедления транспортного средства.
6.1.2 Необходимые функции для тяжелых транспортных средств
Тяжелые транспортные средства, оснащенные FVCMS, должны выполнять такие же функции, как и легкие транспортные средства, и дополнительно следующие функции:
препятствовать "складыванию" автопоезда (складывание связи между кабиной и прицепом сочлененного транспортного средства, получая V-форму кабины и прицепа) при применении ответных меры системой FVCMS.
6.2 Операционная модель - диаграмма состояний и переходов
FVCMS должна функционировать в соответствии с диаграммой состояний и переходов, показанной на рисунке 2. Дополнительные специфические особенности системы, выходящие за рамки диаграммы, представленной на рисунке 2, остаются за производителем.
|
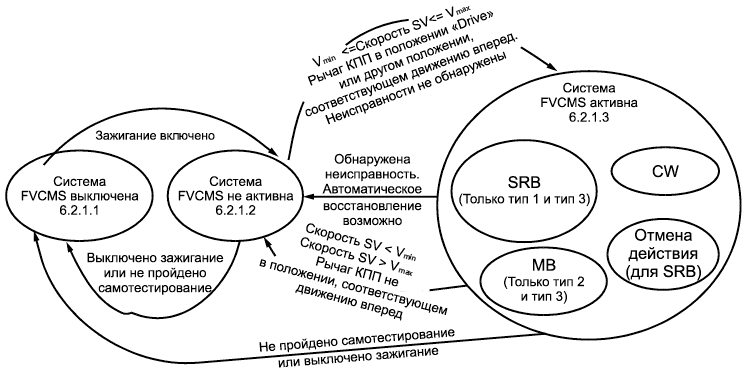
Рисунок 2 - Диаграмма состояний и переходов системы FVCMS
FVCMS при необходимости может функционировать в соответствии с диаграммой состояний и переходов, показанной на рисунке 3.
Конкретная реализация системы, сверх того, что показано ниже, на диаграмме состояний и переходов остается за производителем.
|
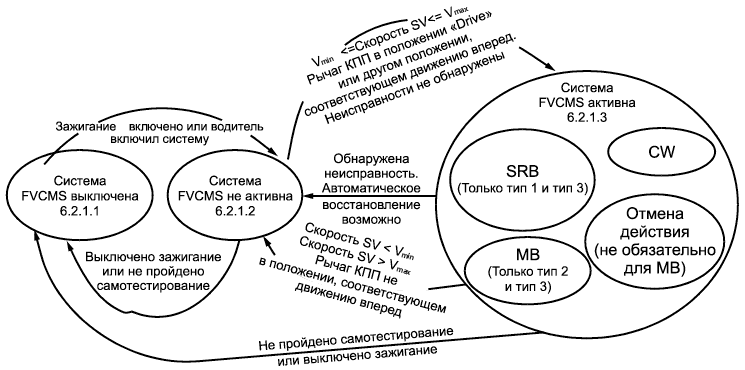
Рисунок 3 - Диаграмма состояний и переходов системы FVCMS, включающая дополнительные функции
6.2.1 Описание функциональных состояний
В описании функциональных состояний FVCMS изложены функциональные требования к FVCMS, определяющие, какие функции должны выполняться в каждом из состояний.
6.2.1.1 Система FVCMS выключена
В выключенном состоянии FVCMS не осуществляется никаких контрмер. При выключении зажигания FVCMS осуществляет переход в состояние "Выключено". Всякий раз, когда функция самодиагностики определяет, что FVCMS не способна функционировать адекватно или когда водитель вручную отключает FVCMS (опционально), осуществляется переход FVCMS в состояние "Выключено". FVCMS может быть в выключенном состоянии, когда транспортное средство находится в движении.
6.2.1.2 Система FVCMS не активна
В неактивном состоянии FVCMS должна контролировать скорость транспортного средства и состояние коробки перемены передач для того, чтобы определить состояние транспортного средства, при котором можно активировать систему.
FVCMS должна перейти в неактивное состояние из состояния "Выключено", если выполнен цикл зажигания и двигатель работает. FVCMS должна перейти в это состояние из активного состояния, если условия нахождения в активном состоянии не выполняются. Например, если скорость транспортного средства падает ниже , или выбрана передача заднего хода коробки перемены передач, или состояние "Parking". Основываясь на результатах самотестирования, все функции или некоторые из них могут быть восстановлены. Если производитель определил режим сбоя, при котором автоматическое восстановление (опционально) исправного состояния возможно, FVCMS при сбое должна осуществить переход из активного состояния в неактивное состояние. После того как произойдет восстановление работоспособного состояния, FVCMS может перейти обратно в активное состояние. Наконец, если водитель вручную включает FVCMS (опция), то осуществляется переход FVCMS из выключенного состояния в неактивное состояние.
6.2.1.3 Система FVCMS активна
В активном состоянии FVCMS осуществляет контроль выполнения условий, при которых выбираются соответствующие ответные меры, принимаются решения активировать или (при необходимости) отменить ответные меры.
Если происходит сбой системы или возникает неспособность выполнять ответные меры, FVCMS должна перейти в неактивное состояние, если автоматическое восстановление после сбоя возможно. Если в результате самотестирования обнаружится сбой системы и автоматическое восстановление без вмешательства водителя невозможно, FVCMS должна перейти в выключенное состояние. Средства уведомления водителя об этих сбоях остаются на усмотрение производителя.
FVCMS должна войти в активное состояние, если выбран любой режим движения вперед и скорость транспортного средства больше или равна и меньше или равна
.
6.3 Требования к эксплуатационным характеристикам
Требования настоящего подпункта применяются к режиму вождения на чистой, гладкой, сухой поверхности.
6.3.1 Типы транспортных средств - целей
FVCMS следует обеспечить необходимые ответные меры при обнаружении лицензируемых автотранспортных средств, предназначенных для использования на дорогах общего пользования, т.е. мотоциклов, легковых автомобилей, тягачей, автобусов, междугородных автобусов и других тяжелых транспортных средств. FVCMS может (не обязательно) обнаружить небольшие цели, например пешеходов и транспортные средства, приводимые в движение человеком.
6.3.2 Типы столкновений
FVCMS должна функционировать в ситуации наезда сзади на любые транспортные средства - цели.
6.3.3 Рабочая скорость
Ограничения рабочей скорости и относительной скорости показаны на рисунке 4. Зона над диагональной линией представляет собой зону условной эксплуатации, зона ниже диагональной линии представляет условия возможной работы, а зона, окрашенная в белый цвет, представляет условия обязательной работы. Верхние пределы максимальной рабочей скорости, как для испытуемого транспортного средства, так и транспортного средства - цели, оставлены на производителя.
6.3.3.1 Испытуемое транспортное средство
FVCMS должна инициировать ответные меры (как это определено в 6.3.6.4.1 для MB и в 6.3.6.5.1 для SRB), если выполняются условия и если скорость испытуемого транспортного средства находится в пределах между и
.
6.3.3.1.1 Минимальная скорость испытуемого транспортного средства ()
Все системы FVCMS должны иметь значение параметра 8,4 м/с (30 км/ч) или меньше. FVCMS должна перейти в неактивное состояние, если скорость испытуемого транспортного средства упадет ниже
смягчающее торможение не применяется. Значение
должно быть заявлено в руководстве по эксплуатации.
|
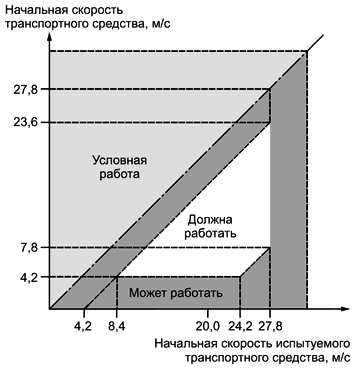
Рисунок 4 - Границы рабочих диапазонов скоростей системы FVCMS
6.3.3.1.2 Максимальная скорость испытуемого транспортного средства ()
Все системы FVCMS должны иметь максимальную скорость от 27,8 м/с (до 100 км/ч) или выше или равную максимальной скорости транспортного средства в случае, если она ниже 27,8 м/с.
Значение должно быть заявлено в руководстве по эксплуатации, если оно меньше максимальной скорости транспортного средства.
6.3.3.2 Транспортное средство - цель
6.3.3.2.1 Минимальная скорость транспортного средства - цели
Минимальная скорость транспортного средства - цели не должна превышать 4,2 м/с для любой скорости испытуемого транспортного средства.
Минимальная скорость транспортного средства - цели для первоначального обнаружения системой FVCMS определяется изготовителем испытуемого транспортного средства.
FVCMS должна функционировать при любой скорости транспортного средства - цели в пределах ограничений дальности обнаружения, установленных в 6.3.4, и оставаться работоспособной в то время как транспортное средство - цель снижает скорость вплоть до 0 м/с.
FVCMS должна также соответствовать требованиям относительной скорости, установленным в 6.3.3.3.
6.3.3.2.2 Максимальная скорость транспортного средства - цели
FWCMS должна функционировать при движении транспортного средства - цели с любой скоростью, вплоть до меньшей минимальной относительной скорости (как определено в 6.3.3.3), в соответствии с диапазоном эксплуатации FVCMS, изображенном на рисунке 4.
6.3.3.2.3 Максимальное боковое смещение (распознавание при боковом смещении)
FVCMS должна функционировать, когда боковое смещение равно 20% или менее в любом направлении. FVCMS может функционировать при боковых смещениях больше чем на 20% по усмотрению изготовителя.
6.3.3.2.4 Максимальная скорость бокового смещения
При наличии бокового смещения FVCMS должна функционировать при относительных боковых скоростях менее 0,2 м/с. FVCMS может функционировать для* при относительной скорости бокового смешения, превышающей 0,2 м/с, по усмотрению изготовителя.
________________
* Текст документа соответствует оригиналу. - .
6.3.3.3 Относительная скорость
FVCMS должна функционировать при любой относительной скорости, когда испытуемое транспортное средство приближается к транспортному средству - цели в пределах от -4,2 м/с (-15 км/ч) до -20 м/с (-72 км/ч). Производители могут расширить операционную зону за эти пределы по своему усмотрению.
Если требуемое замедление превышает минимальное требуемое замедление для ответной меры MB из-за замедления транспортного средства - цели, то испытуемому транспортному средству разрешается применить ответную меру SRB или MB в зоне условной работы (рисунок 4). Если ЕТТС меньше 4 с, то система может применять SRB в зоне условной работы.
6.3.4 Зона обнаружения транспортного средства - цели
FVCMS должна контролировать область впереди испытуемого транспортного средства всякий раз, когда она находится в активном состоянии. Типы датчика(ов) и мест(а) установки остаются за производителем. Ширина диапазона обнаружения для радиуса кривизны в плане должна быть расширена в зависимости от значения радиуса кривизны, как изложено в ИСО 15623.
6.3.4.1 Минимальная зона обнаружения
Минимальная зона обнаружения должна быть такой, как показано на рисунке 5 и в таблицах 3 и 4.
|
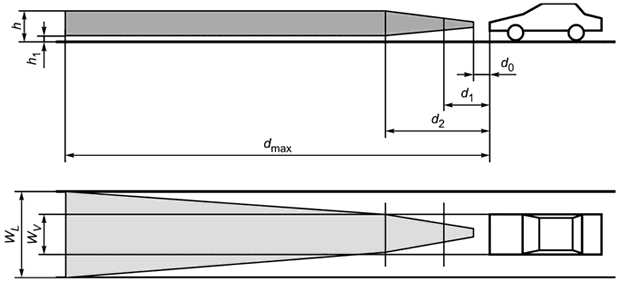
Рисунок 5 - Минимальная зона обнаружения
6.3.4.2 Диапазон обнаружения
Таблица 3 - Диапазон обнаружения
Расстояние | Формула или значение | Описание |
Должно равняться расстоянию, при котором | Максимальное расстояние обнаружения | |
Должно быть не больше, чем 10 м для класса I, может быть не больше 7,5 м для класса II, может быть не больше 5 м для класса III | Минимальное расстояние обнаружения движущегося впереди транспортного средства при боковом смещении менее чем на 20%. Определение класса дано в ИСО 15623 | |
Должно быть по крайней мере равно расстоянию, на котором | Минимальное расстояние, при котором система сохраняет способность измерения расстояния | |
Должно быть не больше 2 м | Минимальное расстояние, на котором распознается присутствие транспортного средства - цели без измерения расстояния | |
Примечание - | ||
6.3.4.3 Ширина и высота зоны обнаружения
Таблица 4 - Требования к ширине и высоте зоны обнаружения
Расстояние | Минимальная ширина обнаружения | Минимальная высота обнаружения |
|
| |
|
| |
Не определено | ||
Не определено |
6.3.5 Распознавание цели
6.3.5.1 Распознавание в продольном направлении
Если впереди обнаруживаются два или более транспортных средства, FVCMS должна выбрать меры противодействия, основываясь на одном из них, значение PUP для которого указывает на наибольшую вероятность столкновения.
6.3.5.2 Распознавание в поперечном направлении
Если движущееся впереди транспортное средство находится на пути испытуемого транспортного средства и впереди присутствует прилегающее транспортное средство, система должна обеспечить предупреждения и смягчение торможения для транспортного средства, находящего на пути испытуемого транспортного средства.
6.3.6 Требования к мерам противодействия
6.3.6.1 Предоставление мер противодействия MB или SRB
Все системы FVCMS должны обеспечивать выполнение мер противодействия MB или SRB.
6.3.6.2 Предоставление мер противодействия CW
Все системы FVCMS должны обеспечивать выполнение мер противодействия CW.
6.3.6.3 Управление тормозными огнями
Если FVCMS применяет автоматическое торможение, тормозные огни должны загораться. Тормозные огни должны быть зажжены не позднее чем через 350 мс после того, как FVCMS инициирует автоматическое торможение. Для предотвращения раздражающего мерцания стоп-сигнала он может оставаться включенным в течение разумного периода времени после того, как FVCMS торможение закончилось.
6.3.6.4 Требования к смягчающему торможению
Следующие требования представляют собой минимальную функциональность FVCMS. Производители могут превышать эту минимальную функциональность по своему усмотрению.
6.3.6.4.1 Инициализация смягчающего торможения
6.3.6.4.1.1 Легкие транспортные средства
MB не следует инициировать при значениях ТТС или ЕТТС более 3,0 с для выполнения требования по замедлению, изложенного в 6.3.6.4.2.
6.3.6.4.1.2 Тяжелые транспортные средства
MB не должно быть начато для ТТС или ЦИТТ более 4,0 с для достижения требования по замедлению, изложенного в 6.3.6.4.2.
6.3.6.4.2 Минимальное замедление торможения по предотвращению столкновения
6.3.6.4.2.1 Легкие транспортные средства
FVCMS должна генерировать замедление по крайней мере 5,0 м/с (0,51 g) в течение длительности интервала времени, выбранного для достижения снижения скорости не менее чем до 2,0 м/с. FVCMS, применяя в сочетании меры противодействия MB и SRB (тип 3), должна генерировать минимальное снижение скорости по меньшей мере до 4,0 м/с. Это требование не ограничивает время, в течение которого применяется смягчающее торможение.
6.3.6.4.2.2 Тяжелые транспортные средства
FVCMS должна генерировать замедление по крайней мере 3,3 м/с (0,34 g) в течение длительности интервала времени, выбранного для достижения снижения скорости не менее чем до 1,0 м/с. Это требование не ограничивает время, в течение которого применяется смягчающее торможение.
6.3.6.4.3 Усиление смягчающего торможения водителем
FVCMS разрешает увеличение тормозного усилия, инициируемого водителем, кроме тех случаев, когда испытуемое транспортное средство (SV) уже достигло максимальной возможности торможения.
6.3.6.4.4 Прекращение смягчающего торможения
FVCMS может деактивировать смягчающее торможение, если PUP становится меньше, чем ![]() . Если такая деактивация осуществляется и значение PUP быстро изменяется в ответ на изменение относительное положение испытуемого транспортного средства и транспортного средства - цели или при изменении направления скорости движения, изготовитель может предотвратить дребезжание, например путем введения гистерезиса в управление деактивацией.
. Если такая деактивация осуществляется и значение PUP быстро изменяется в ответ на изменение относительное положение испытуемого транспортного средства и транспортного средства - цели или при изменении направления скорости движения, изготовитель может предотвратить дребезжание, например путем введения гистерезиса в управление деактивацией.
6.3.6.4.5 Отмена смягчающего торможения, инициированная водителем
FVCMS опционально может позволить водителю переопределить смягчающее торможение таким образом, как это определено производителем. После того как мера противодействия MB активирована и водитель отменил ее, MB может активироваться после того, как отмена торможения, инициированная водителем, закончилась.
6.3.6.4.6 Торможение с пониженной тягой
Смягчающее торможение не должно приводить к блокировке колес на время большее, чем позволяют системы антиблокировки или устройства контроля устойчивости (ABS/RSC).
6.3.6.5 Снижение скорости торможением
Следующие требования представляют собой минимальную функциональность для работы FVCMS. Производители могут превышать эту минимальную функциональность по своему усмотрению.
6.3.6.5.1 Инициирование мер противодействия SRB
SRB не должно быть начато при значении ТТС или ЕТТС более 4,0 с. Точка активации выбирается решением производителя.
6.3.6.5.2 Максимальное замедление при применении SRB
Средняя величина замедления, генерируемая при активации SRB, не должна превышать уровня ![]() * (в среднем за первый период времени T_1_SRB сек) для любой скорости испытуемого транспортного средства между 5,0 и 20 м/с; где
* (в среднем за первый период времени T_1_SRB сек) для любой скорости испытуемого транспортного средства между 5,0 и 20 м/с; где - замедление испытуемого транспортного средства,
- скорость испытуемого транспортного средства и
![]() .
.
_______________
* Формула соответствует оригиналу. - .
Средняя величина замедления, создаваемая SRB, не должна превышать в первый период Т_1_ SRB действия SRB 4,0 м/с (в среднем за первый период времени T_1_SRB с) при значении
более 20 м/с или 5 м/с
при значении
менее 5 м/с (как показано на рисунке 6).
После периода времени, равного по крайней мере T_1_SRB, максимально допустимое замедление SRB может быть непрерывно увеличено до 6 м/с (в среднем за 1 с). Для типов 3 и 1: T_1_SRB не менее 0,5 с. Среднее значение рывка, достигнутое в ходе применения SRB при увеличении максимального замедления, не должно превышать 6,0 м/с
* в среднем за 0,5 с (см. рисунки 6 и 7).
________________
* Текст документа соответствует оригиналу. - .
|
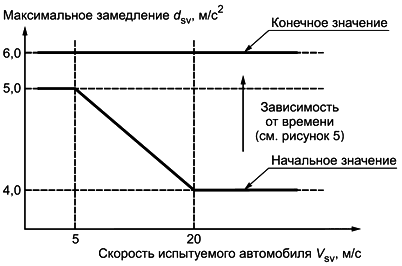
Рисунок 6 - Максимальное замедление при SRB, показывающее непрерывные изменения требования к величине замедления
|
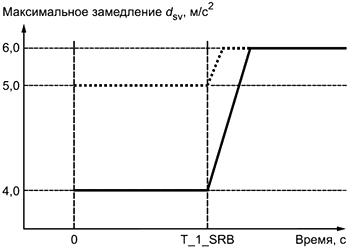
Рисунок 7 - Изменения ускорения при SRB в зависимости от времени
6.3.6.5.3 Минимальная эффективность меры SRB
Функция SRB (тип 1) системы должна как минимум снижать скорость до той же степени, какая соответствует минимальным требованиям для функции MB.
6.3.6.5.4 SRB с пониженной тягой
Применение SRB не должно приводить к блокированию колес на срок больший, чем позволили бы система антиблокировки или устройства контроля устойчивости (ABS/RSC).
6.3.6.5.5 Переопределение снижения скорости торможением, инициированное водителем
FVCMS разрешает водителю переопределять снижение скорости торможением таким способом, как это определено производителем.
6.3.6.6 Предупреждения об опасности столкновения
Предупреждения о столкновении должны представлять собой меру, реализуемую на основе некоторой комбинации звуковых, визуальных и тактильных или тактильных сенсорных режимов, в соответствии с ИСО 15623.
6.3.7 Средства управления и интерфейс водителя
6.3.7.1 Легкие транспортные средства
6.3.7.1.1 Информация об ограничении системы
Водитель должен по крайней мере быть ознакомлен с эксплуатационными ограничениями FVCMS с помощью руководства по технической эксплуатации системы или другого эквивалентного альтернативного источника.
6.3.7.1.2 Отключение FVCMS водителем
Водитель может быть снабжен средством для отключения FVCMS.
Для систем, которые имеют средства для ручного перевода FVCMS из активного состояния и/или неактивного состояния в выключенное состояние, водитель должен иметь возможность легко определять текущее состояние системы.
6.3.7.1.3 Индикация неисправности FVCMS
Должны быть предусмотрены средства индикации для водителя о возникновении неисправности системы.
6.3.7.2 Тяжелые транспортные средства
6.3.7.2.1 Информация об обнаружении транспортного средства - цели
Если иное не предусмотрено, то FVCMS может информировать водителя в момент, когда было обнаружено транспортное средство - цель. Эта дополнительная информация, показанная водителю заранее, поможет опытным водителям тяжелых транспортных средств избежать длительной задержки начала торможения и значительного расстояния торможения.
6.3.7.2.2 FVCMS - ограничение информации
Водитель должен по крайней мере быть ознакомлен с эксплуатационными ограничениями FVCMS с помощью инструкции по эксплуатации.
6.3.7.2.3 Отключение FVCMS водителем
Водитель может быть снабжен средством для отключения FVCMS.
Для систем, которые имеют средства для ручного перевода FVCMS из активного состояния и/или неактивного состояния в выключенное состояние, водитель должен иметь возможность легко определять текущее состояние системы.
6.3.7.2.4 Индикация неисправностей системы
Водитель должен иметь средства индикации неисправностей системы.
7 Методы проверки
7.1 Описание цели, используемой при тестовых испытаниях
7.1.1 Характеристики распознавания
7.1.1.1 Оптический радар (т.е. лидар, или ладар)
7.1.1.1.1 Транспортное средство - цель
Цель теста определяется как обладающая физическим размером, формой и профилем поверхности образца пассажирского транспортного средства со значением СТТ (коэффициент отражения цели испытаний), которое соответствует отражательной способности пассажирского транспортного средства.
7.1.1.1.2 Цель - мотоцикл
Цель испытаний определяется как обладающая физическим размером, формой и профилем поверхности образца мотоцикла со значением СТТ (коэффициент отражения цели испытаний), которое соответствует отражательной способности мотоциклов.
7.1.1.1.3 Располагаемая сверху цель
Цель испытаний определяется как обладающая физическим размером, формой и профилем поверхности образца структуры автомагистрали, которая, как правило, располагается над проезжей частью, и со значением СТТ (коэффициент отражения цели испытаний), которое соответствует отражательной способности структуры автомагистрали.
7.1.1.2 Радиоволновой радар
7.1.1.2.1 Транспортное средство - цель
Цель теста определяется как обладающая физическим размером, формой и профилем поверхности образца пассажирского транспортного средства со значением RCS (эффективная поверхность рассеяния), которое соответствует отражательной способности пассажирского транспортного средства.
7.1.1.2.2 Цель - мотоцикл
Цель испытания определяется как обладающая физическим размером, формой и профилем поверхности образца мотоцикла со значением RCS, которое соответствует отражательной способности мотоциклов.
7.1.1.2.3 Располагаемая сверху цель
Цель испытания определяется как обладающая физическим размером, формой и профилем поверхности представительной структуры автомагистрали, которая, как правило, располагается над проезжей частью, и со значением RCS, которое соответствует отражательной структуре автомагистрали.
7.1.1.3 Пассивный оптический датчик
7.1.1.3.1 Транспортное средство - цель
Цель испытания определяется как обладающая физическим размером, формой и профилем поверхности образца пассажирского транспортного средства.
7.1.1.3.2 Цель - мотоцикл
Цель испытания определяется как обладающая физическим размером, формой и профилем поверхности образца мотоцикла с мотоциклистом.
7.1.1.3.3 Располагаемая сверху цель
Цель испытания определяется как обладающая физическим размером, формой и профилем поверхности образца структуры автомагистрали, которая, как правило, располагается над проезжей частью.
7.1.2 Физические ограничения для цели испытаний
7.1.2.1 Оптический радар (т.е. лидар, или ладар)
СТТ описывает только качество отражателя (затухание). Наименьшая приемлемая цель испытаний представляет собой угловой отражатель с требуемым значением СТТ. Допустимо использовать в испытаниях объект с большей поверхностью отражения, если он отвечает тем же требованиям к СТТ.
7.1.2.2 Радиоволновой радар
Геометрия цели испытаний обсуждается в приложении D ИСО 15623.
7.1.2.3 Пассивный оптический датчик
Цели испытаний должны обеспечить профиль поверхности образца мотоцикла с мотоциклистом и пассажирского транспортного средства. Если используется надувная цель, она должна иметь ограниченную деформацию поверхности. Отражательная способность должна быть такой же, как у серийных транспортных средств.
7.2 Условия окружающей среды
Следующие подразделы описывают условия окружающей среды, которые должны существовать при испытаниях функциональности в соответствии со стандартом. Эти экологические условия не являются исчерпывающими или ограничительными при оценке производительности системы. Это не исключает возможности проведения испытаний, когда имеются дополнительные условия.
7.2.1 Поверхность для проведения испытаний
Испытания должны проводиться на ровной, сухой асфальтовой или бетонной поверхности. Трение между шинами испытуемого транспортного средства и качество поверхности вождения во время испытаний должны быть достаточно высокими, чтобы поддерживать максимальное тормозное действие, которое разрешается для испытуемой системы.
7.2.2 Условия освещения
Ограничения на условия освещения при испытаниях отсутствуют. Испытания могут проводиться при дневном освещении.
7.2.3 Температура окружающего воздуха
Интервал температур должен быть от -20°С до 40°С. По усмотрению изготовителя тестирование может происходить вне этого диапазона температур.
7.2.4 Горизонтальная видимость
Горизонтальная видимость должна быть больше 1 км.
7.3 Метод испытания для определения зоны обнаружения
Самым естественным испытанием для определения зоны обнаружения является динамическое испытание. Однако статические испытания также доступны в качестве опции. Такие испытание должны проводиться следующим образом. Система должна обнаружить цель испытаний, расположенную на произвольном расстоянии между и
, как показано на рисунке 8. Система должна обнаружить цель испытаний, расположенную на произвольном расстоянии между
и
, как показано на рисунке 8. Система должна обнаруживать цели испытаний, расположенные, в свою очередь, на обоих расстоянии
и
, как показано на рисунке 8.
Если обнаружение не может быть подтверждено без специального измерительного оборудования, например, когда датчик и ECU тесно интегрированы, изготовитель может провести этот тест с использованием специального оборудования для измерения и представить результаты испытаний для проверки. Кроме того, поскольку эти испытания могут проводиться в динамике, они могут быть проведены одновременно с другими испытаниями, изложенными в разделе 7, таким образом, чтобы цель данных испытаний выполнялась и при выполнении других испытаний. Например, испытуемое транспортное средство для достижения ранее определенных целевых технических требований к испытаниям может быть использовано в качестве цели испытаний. Успешное инициирование предупреждения об опасности столкновения на различных расстояниях, определенных в этом тесте, можно считать успешным обнаружением цели.
|
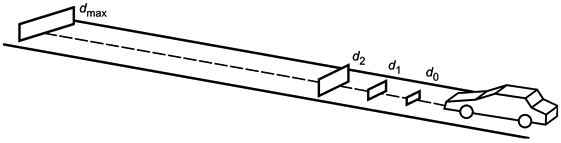
Рисунок 8 - Расстояние обнаружения
7.4 Испытания функциональных способностей
В данных испытаниях можно использовать стандартные отражатели вместо транспортных средств - целей. Испытания функциональных способностей проводятся по одному сценарию при скорости движения испытуемого транспортного средства с (20±2) м/с и (8±1) м/с скорости движения транспортного средства - цели таким образом, чтобы они имели номинальную относительную скорость - 12 м/с. Испытуемое транспортное средство начинает приближаться к транспортному средству - цели, находясь далеко позади. Испытания считаются успешно выполненными, если система выдает предупреждение об опасности столкновения и достигает требуемого снижения скорости (и требуемого замедления для типов 2 и 3, которое соответствует указанному в 6.3.6.4.2 (минимальное замедление торможения по предотвращению столкновения), до того как столкновение происходит.
|
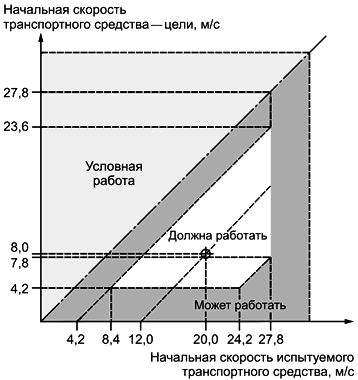
Рисунок 9 - Испытание функциональных возможностей и скорости движения испытуемого транспортного средства и транспортного средства - цели
|

Рисунок 10 - Расположение транспортных средств при испытаниях функциональных возможностей
7.5 Метод испытаний для определения способности распознавания цели
Эти испытания проводятся с транспортными средствами в движении. Последовательность операций для каждого испытания по данному подпункту завершается, когда испытуемое транспортное средство формирует предупреждение об опасности столкновения. Испытания должны также показать возможность избежать ложных предупреждений. Если предупреждение не производится, испытание завершается после того, когда необходимые маневры завершены. По усмотрению изготовителя эти испытания могут быть расширены для оценки функций SRB или MB системы. Каждое из этих испытаний может быть выполнено при скоростях движения испытуемого транспортного средства и транспортного средства - цели, указанных для испытаний функциональных возможностей.
7.5.1 Испытание распознавания в продольном направлении
Два транспортных средства - цели двигаются в зоне обнаружения со скоростью 20 м/с. Испытуемое транспортное средство следует за этими двумя транспортными средствами - целями со скоростью 20 м/с. Временной интервал между двумя транспортными средствами - целями должен быть (0,6±0,1) с. И два транспортных средства - цели расположены вдоль линии таким образом, чтобы ближнее транспортное средство - цель не маскировало дальнее транспортного средство - цель, как показано на рисунке 11. Временной интервал между испытуемым транспортным средством и ближним транспортным средством - целью может быть более 1,5 с. Испытуемое транспортное средство приближается к транспортным средствам - целям, пока система не произведет предупреждение об опасности столкновения. После этого испытуемое транспортное средство затормаживается до того же промежутка времени (например, большего или равного 1,5 с) и затем следует за транспортным средством - целью стой же самой скоростью. Через несколько секунд только ближнее транспортное средство - цель тормозится до скорости, которая является достаточно низкой, чтобы испытуемое транспортное средство произвело предупреждение об опасности столкновения. Испытание завершается, если испытуемое транспортное средство произвело предупреждение об опасности столкновения.
Испытания пройдены, если точка включения предупреждения находится в соответствии с величиной порога запуска функции предупреждения только относительно одного ближнего транспортного средства - цели.
|
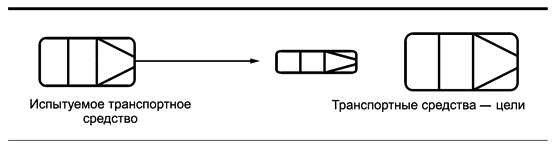
Рисунок 11 - Испытания способности распознавания в продольном направлении
7.5.2 Испытания распознавания в поперечном направлении на прямом участке дороги
Испытание должно выполняться в динамике. Испытуемое транспортное средство и транспортное средство - цель двигаются с одинаковой скоростью, которая составляет 20 м/с, и с временным промежутком, при котором предупреждение не формируется. Временной интервал между испытуемым транспортным средством и транспортным средством - целью может быть более 1,5 с. Движущееся впереди транспортное средство движется рядом с транспортным средством - целью с той же скоростью, что и транспортное средство - цель, как показано на рисунке 12.
Расстояние между продольными осями движущихся впереди транспортных средств составляет (3,5±0,25) м. Ширина движущихся впереди транспортных средств должна быть между 1,4 и 2,0 м. Боковое смещение испытуемого транспортного средства и транспортного средства цели должно быть не менее 20%. Через несколько секунд движущееся впереди транспортное средство тормозится до скорости, которая значительно ниже, чем скорость испытуемого транспортного средства и транспортного средства - цели. Во время опережения движущегося впереди транспортного средства, испытуемое транспортное средства не должно ни производить предупреждения, ни выполнять смягчающее торможение. Через несколько секунд транспортное средство - цель тормозится до скорости, которая является достаточно низкой, чтобы испытуемое транспортное средство произвело предупреждение об опасности столкновения. Испытание завершается, когда испытуемое транспортное средство произвело предупреждение об опасности столкновения.
7.5.3 Испытание распознавания бокового смещения на прямом участке дороги
Испытание должно выполняться в динамике. Испытуемое транспортное средство и транспортное средство - цель двигаются с одинаковой скоростью, которая составляет 20 м/с, и с временным промежутком, при котором предупреждение не формируется. Временной интервал между испытуемым транспортным средством и транспортным средством - целью может быть более 1,5 с.
Транспортное средство - цель двигается за движущимся впереди транспортным средством на расстоянии большем, чем от испытуемого транспортного средства, с той же скоростью, что и испытуемое транспортное средство и движущееся впереди транспортное средство, как показано на рисунке 13. Ширина транспортного средства - цели и движущегося впереди транспортного средства должна составлять от 1,4 до 2,0 м. Боковое смещение испытуемого транспортного средства и движущегося впереди транспортного средства должно быть не менее 20%.
|
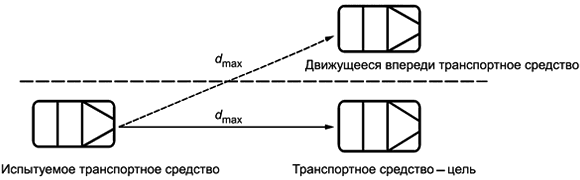
Рисунок 12 - Испытания распознавания в поперечном направлении на прямом участке дороги
|
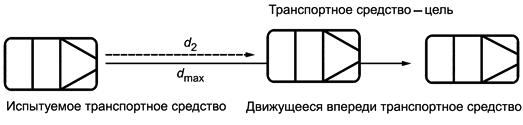
Рисунок 13 - Испытание распознавания бокового смещения на прямом участке дороги
Боковое смещение испытуемого транспортного средства и транспортного средства - цели должно составлять от 15 до 20%. Через несколько секунд транспортное средство - цель тормозится до скорости, которая является достаточно низкой, чтобы испытуемое транспортное средство произвело предупреждение об опасности столкновения. Испытание завершается, когда испытуемое транспортное средство произвело предупреждение об опасности столкновения.
7.5.4 Испытание распознавания бокового смещения на непрямолинейном участке дороги
В дополнение к испытаниям на прямом участке дороги следующим испытанием должно быть испытание, выполненное по кругу или достаточной части круга с максимальным радиусом кривизны 500 м для системы класса I, с максимальным радиусом кривизны 250 м для системы класса II, и с максимальным радиусом кривизны 125 м для системы класса III. Испытание должно выполняться динамически. Испытуемое транспортное средство и транспортное средство - цель двигаются по одной и той же полосе движения с одинаковой скоростью и на расстоянии, при котором предупреждение не формируется, как показано на рисунке 14. Скорость испытываемых транспортных средств в начале теста определяется следующим образом:
![]() ,
,
где ![]() составляет 2,0 м/с
составляет 2,0 м/с для класса I,
![]() составляет 2,3 м/с
составляет 2,3 м/с для класса II и III.
Движущееся впереди транспортное средство двигается около транспортного средства - цели по внешней полосе движения. Через несколько секунд движущееся впереди транспортное средство тормозится до скорости, которая значительно ниже, чем скорость испытуемого транспортного средства и транспортного средства - цели. Во время прохождения движущегося впереди транспортного средства испытуемое транспортное средство не должно ни производить предупреждение, ни инициировать смягчающее торможение. Транспортное средство - цель замедляется так, что через несколько секунд его скорость становится достаточно малой, чтобы испытуемое транспортное средство произвело предупреждение об опасности столкновения. Испытание завершается, когда испытуемое транспортное средство произвело предупреждение об опасности столкновения.
|
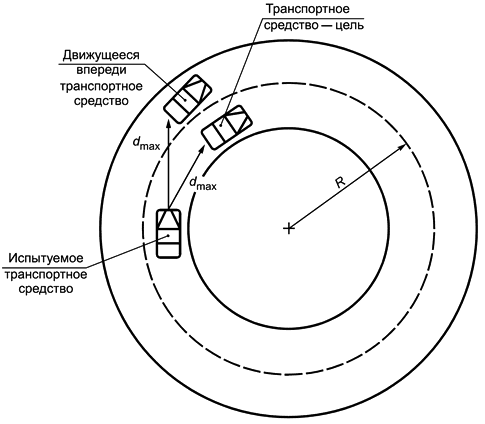
Рисунок 14 - Испытание распознавания бокового смещения на непрямолинейном участке дороги
7.5.5 Испытание распознавания объектов, расположенных выше проезжей части дороги
Испытание должно выполняться динамически. Как показано на рисунке 15, объект, расположенный выше проезжей части дороги, который может привести к неправильной работе системы, установлен на 4,5 м выше проезжей части на расстоянии большем, чем . Испытуемое транспортное средство приближается к цели, расположенной выше проезжей части дороги. Испытание завершается, когда испытуемое транспортное средство пройдет под расположенной выше целью, не производя никакого предупреждения или торможения.
|
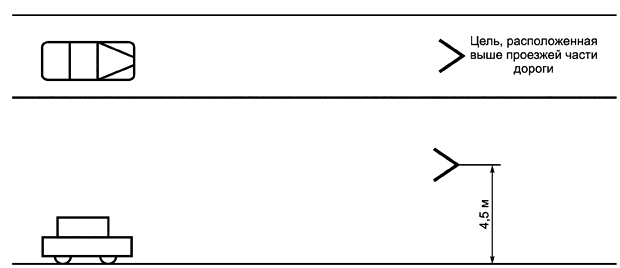
Рисунок 15 - Испытание распознавания объектов, расположенных выше проезжей части дороги
Приложение А
(обязательное)
Оценка эффективности применения системы
А.1 Эффективность мер по снижению тяжести последствий и потенциал для предотвращения столкновения
Простые кинематические расчеты свидетельствуют о том, что системы предотвращения столкновения могут уменьшить кинетическую энергию при ударе на значительную величину. Предположим, что масса транспортного средства составляет 1400 кг и среднее значение замедления за счет автоматического (не управляемого водителем) торможения, применяемого в качестве ответной меры, равно 0,5 g. Предположим, что для торможения имеются идеальные условия проезжей части и сцепления. Потенциал снижения воздействия кинетической энергии показан на следующем графике.
|
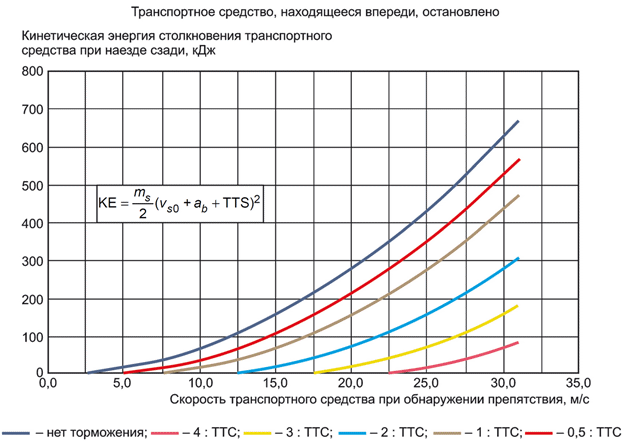
Рисунок А.1 - Энергия при столкновении, среднее замедление при торможении 0,5 g
А.2 Минимальные возможности, касающиеся относительной скорости и предполагаемой возможности датчика
В таблице А.1 рассматривается сценарий, в котором оборудованное системой транспортное средство приближается к движущемуся впереди транспортному средству с относительной скоростью до 30 м/с. Обнаруживает и оценивает движущееся впереди транспортное средство в течение не более 2 с и тормозит с замедлением 0,5 д. Вычисляется расстояние, при котором обнаружение должно начинаться (т.е. эффективный радиус действия датчика). Датчики с большим радиусом действия могут поддержать режим остановки оборудованного транспортного средства при более высоких скоростях. Движущееся впереди транспортное средство не указано в качестве подвижного или неподвижного.
Для эффективного минимального радиуса действия датчика 60 м видно, что торможение может быть начато при относительной скорости до 16,5 м/с (59 км/ч, 37 миль/ч).
Если время холостого пробега сокращается до 1 с, максимальная скорость для датчика с диапазоном обнаружения 60 м увеличивается до 20 м/с (72 км/ч, 45 миль/ч). Если время холостого пробега равно нулю, максимальная скорость возрастает только примерно до 24,5 м/с (88 км/ч, 55 миль/ч).
Для формулирования требования к минимальной возможности, касающейся относительной скорости, предположим, что время холостого пробега () составляет 1 с. В таком случае требуемая скорость составляет 20 м/с (72 км/ч).
Таблица А.1 - Минимальная возможность, касающаяся относительной скорости и предполагаемой возможности датчика
Предположения | |||||
Замедление при автоматическом торможении | А | 0,5 | м/сек | ||
Время холостого пробега | 1 | С | |||
Шаг приращения скорости | Шаг приращения | 1 | м/с | ||
Относительная скорость | Время торможения | Тормозной путь | Расстояние холостого пробега | Диапазон | |
0 | 0 | 0 | 0 | 0 | |
1 | 0,2 | 0,1 | 1,0 | 1,1 | |
2 | 0,4 | 0,4 | 2,0 | 2,4 | |
3 | 0,6 | 0,9 | 3,0 | 3,9 | |
4 | 0,8 | 1,6 | 4,0 | 5,6 | |
5 | 1,0 | 2,5 | 5,0 | 7,5 | |
6 | 1,2 | 3,6 | 6,0 | 9,6 | |
7 | 1,4 | 4,9 | 7,0 | 11,9 | |
8 | 1,6 | 6,4 | 8,0 | 14,4 | |
9 | 1,8 | 8,1 | 9,0 | 17,1 | |
10 | 2,0 | 10,0 | 10,0 | 20,0 | |
11 | 2,2 | 12,1 | 11,0 | 23,1 | |
12 | 2,4 | 14,4 | 12,0 | 26,4 | |
13 | 2,6 | 16,9 | 13,0 | 29,9 | |
14 | 2,8 | 19,6 | 14,0 | 33,6 | |
15 | 3,0 | 22,5 | 15,0 | 37,5 | |
16 | 3,2 | 25,6 | 16,0 | 41,6 | |
17 | 3,4 | 28,9 | 17,0 | 45,9 | |
18 | 3,6 | 32,4 | 18,0 | 50,4 | |
19 | 3,8 | 36,1 | 19,0 | 55,1 | |
20 | 4,0 | 40,0 | 20,0 | 60,0 | |
21 | 4,2 | 44,1 | 21,0 | 65,1 | |
22 | 4,4 | 48,4 | 22,0 | 70,4 | |
23 | 4,6 | 52,9 | 23,0 | 75,9 | |
24 | 4,8 | 57,6 | 24,0 | 81,6 | |
25 | 5,0 | 62,5 | 25,0 | 87,5 | |
26 | 5,2 | 67,6 | 26,0 | 93,6 | |
27 | 5,4 | 72,9 | 27,0 | 99,9 | |
28 | 5,6 | 78,4 | 28,0 | 106,4 | |
29 | 5,8 | 84,1 | 29,0 | 113,1 | |
30 | 6,0 | 90,0 | 30,0 | 120,0 | |
Примечание - | |||||
А.3 Минимальная верхняя граница диапазона рабочих скоростей
Предполагается, что все системы FVCMS должны работать в диапазоне скоростей транспортного средства от до
и что минимальное значение
должно быть 27,8 м/с или 100 км/ч. Значение
определено для того, чтобы установить минимальный диапазон рабочих скоростей, который все системы FVCMS должны предоставить водителям. Этот интервал рабочих скоростей должен составлять существенную долю скорости движения, поэтому верхний предел должен быть определен на основе собранных данных о скорости движения.
Сведения о скорость движения были собраны в качестве дополнительного материала проекта полевых испытаний эксплуатационных характеристик систем предупреждения столкновений. Информация об этих испытаниях доступна на сайтах агентства US NHTSA. Дорожные испытания завершены, и анализа* данных продолжается. Испытания включали 78 водителей, каждый за рулем тестового транспортного средства, которым они владели в течение четырех недель.
________________
* Текст документа соответствует оригиналу. - .
В процессе испытаний общий пробег составил 133000 км, время вождения 2500 ч, выполнено 9600 поездок (значения округлены). Данные вождения, данные системы и данные окружающей среды собирались постоянно. Типы дорог включали: местные дороги, небольшие дороги, большие дороги, пандусы, проезды и дороги неизвестного типа. Этот набор данных очень сложный, поскольку все величины измерялись. Негативной стороной является то, что испытания проводились с участием только водителей из юго-восточного Мичигана.
Исходя из этого, средняя скорость за все время и на для типов дорог составляет 65 км/ч, а стандартное отклонение составляет 35 км/ч. Верхняя граница скорости равна около 100 км/ч. При нормальном распределении скорости движения 84% всех поездок выполнено на скорости 100 км/ч или меньше. Это и есть основание выбора минимального значения максимальной скорости, равного 100 км/ч.
А.4 Справочные данные о распределении скорости наезда
А.4.1 США
Данные США получены на основе доклада Джона А. Вольпе, специалиста Научно-исследовательского центра национальных транспортных систем Департамента транспорта США. Он основан на данных о легких транспортных средствах с 2003 г. и данных о тяжелых транспортных средствах с 2000 по 2003 г.*
________________
* Development of Crash Imminent Test Scenarios for Integrated Vehicle-Based Safety Systems (IVBSS), DOT HS 810 757, April 2007. Wassim G. Najm and John D. Smith, Us Department of Transportation, Research and Innovative Technology Administration, John A. Volpe National Transportation Systems Center, Cambridge, MA USA.
Поскольку информация о скорости транспортных средств непосредственно перед столкновением не известна, нет возможности для полиции непосредственно определить скорость наезда. В данном отчете ограничение скорости используется как индикатор скорости транспортного средства до столкновения. В исследовании также установлено, что транспортные средства превышали установленное ограничение скорости не менее чем в 19% и не более чем в 60% случаев столкновений, зафиксированных в базе данных. Поэтому истинная скорость несколько выше, чем показано в общем. Обратите внимание, что в американских данных более 80% наездов происходят при скорости транспортного средства ниже 55 миль в час (88 км/ч). Почти 10% столкновений с транспортными средствами, стоящими на пути, происходит при скорости между 88 и 111 км/ч.
В США 80% наездов происходят на скорости 80 км/ч или меньше. В Японии 80% наездов происходят на скорости 40 км/ч или меньше. Статистика в Европейском союзе, Соединенном королевстве и Канаде более похожа на статистику США, чем Японии. Это обосновывает необходимость системы FVCMS с широким спектром предоставляемых возможностей.
Таблица А.2 - База сценариев наездов сзади легких транспортных средств
Транспортное средство переходит на новую полосу. Легкое транспортное средство остановилось на новой полосе (5,1) | Транспортное средство обгоняет более медленное легкое транспортное (13,5) | Транспортное средство обгоняет замедляющееся легкое транспортное (52,9) | Транспортное средство врезается в легкое транспортное (52,9) | ||
Скорость, миль/ч | Скорость, км/ч | Предел скорости | Предел скорости | Предел скорости | Предел скорости |
Накопленный % | Накопленный % | Накопленный % | Накопленный % | ||
<25 | <40 | 8 | 9 | 9 | 8 |
30 | 48 | 17 | 16 | 17 | 17 |
35 | 55 | 42 | 36 | 41 | 43 |
40 | 64 | 53 | 46 | 54 | 56 |
45 | 72 | 74 | 64 | 76 | 77 |
50 | 80 | 80 | 69 | 82 | 81 |
55 | 88 | 88 | 82 | 93 | 91 |
60 | 95 | 91 | 88 | 95 | 93 |
65 | 104 | 97 | 97 | 98 | 99 |
>70 | >111 | 100 | 100 | 100 | 100 |
А.4.2 Канада
Данные 2006 г. о наездах, публикуемые по ограничениям скорости и тяжести столкновений, приводятся ниже.
Таблица А.3 - Накопительная доля наездов в зависимости от ограничений скорости и тяжести столкновения
Указанное ограничение скорости | Столкновения со смертельными исходами | Столкновения с несмертельными травмами | Столкновения только с повреждениями транспортных средств | Затруднения при всех столкновениях |
20 | 0 | 0 | 0 | 0 |
30 | 0 | 4 | 3 | 3 |
40 | 2 | 5 | 4 | 4 |
50 | 15 | 54 | 25 | 32 |
60 | 20 | 69 | 35 | 44 |
70 | 22 | 76 | 37 | 47 |
80 | 33 | 82 | 41 | 51 |
90 | 46 | 86 | 43 | 53 |
100 | 96 | 94 | 47 | 59 |
110 | 100 | 94 | 47 | 59 |
Неизвестно | 100 | 100 | 100 | 100 |
Канадская Национальная база данных о столкновениях 2006 г.
Таблица А.4 - Накопительная доля наездов в зависимости от ограничений скорости и тяжести столкновения (только с известными ограничениями на скорость движения)
Указанное ограничение скорости | Столкновения со смертельными исходами | Столкновения с несмертельными травмами | Столкновения только с повреждениями транспортных средств | Затруднения при всех столкновениях |
10 | 0 | 0 | 0 | 0 |
20 | 0 | 0 | 0 | 0 |
30 | 0 | 4 | 6 | 6 |
40 | 2 | 6 | 9 | 7 |
50 | 15 | 57 | 54 | 55 |
60 | 20 | 74 | 75 | 74 |
70 | 22 | 80 | 80 | 80 |
80 | 33 | 86 | 88 | 87 |
90 | 46 | 91 | 91 | 91 |
100 | 96 | 100 | 100 | 100 |
110 | 100 | 100 | 100 | 100 |
Канадская Национальная база данных о столкновениях 2006 г.
А.4.3 Япония
Таблица А.5 основана на данных, представленных Японией после встречи в Портленде, взятом из доклада японского агентства безопасности ITARDA. Скорости основаны на отчетах полиции об авариях. Данные могут представлять национальную базу данных.
Таблица А.5 - Отчетные данные японского агентства безопасности ITARDA
Скорость | Суммарный % |
0 | 0 |
10 | 22 |
20 | 42 |
30 | 62 |
40 | 80 |
50 | 93 |
60 | 97 |
70 | 98 |
А.5 Классификация транспортных средств
Всемирный форум Экономического и социального совета Организации Объединенных Наций для согласования правил в области транспортных средств (WP.29) TRANS/WP.29/1045 оценил способы классификации транспортных средств в США, Европе и Азии. Эта классификация была использована в настоящем стандарте. Документ в настоящее время можно найти по адресу: //www.unece.org/trans/main/wp29/wp29wgs/wp29gen/ wp29classification.html.
А.6 Вывод ЕТТС
Формула для ЕТТС является производной от предположения, что относительное ускорение между СВ и ТВ остается постоянным. Используя закон прямолинейного движения тела, позиция может быть выражена как функция времени:
 .
.
Предполагая ускорение постоянным, получают
![]() .
.
Решают, используя уравнение второго порядка,
![]() ,
, ,
, .
.
A.7 Отношения между АСС (ИСО 15622), FSRA (ИCO 22179) и FVCMS
Различия между системами определяют, что FVCMS типов 2 и 3 работает без нарушений на транспортном средстве, оборудованной системой АСС. Производитель может обеспечить возможности обеих систем в интегрированной системе, поскольку нет никаких конфликтов между функциями этих систем. Если система FVCMS распознает опасность, находясь под контролем системы АСС, она обеспечивает формирование предупреждения о столкновении до начала смягчающего торможения. Это является сигналом водителю о том, что АСС уже не контролирует движение и что существует большая вероятность возникновения чрезвычайной ситуации.
Таблица А.6 - Различия эксплуатационных характеристик систем АСС и FVCMS
Особенности функционирования | АСС | FSRA | FVCMS |
Основная помощь водителю | Активирует привод дроссельной заслонки и тормозов для регулирования скорости и расстояния до движущегося впереди транспортного средства | Активирует привод дроссельной заслонки и тормозов для регулирования скорости и расстояния до движущегося впереди транспортного средства | Активирует тормоз для снижения степени повреждения и возможных травм в случае угрозы наезда сзади |
Предупреждение перед торможением | Не требуется | Не требуется | Требуется |
Критерий активации | Действия водителя или автоматический переход из состояния "Выключено" в состояние "Ожидание". | Действия водителя или автоматический переход из состояния "Выключено" в состояние "Ожидание". | Автоматический переход в неактивное состояние. |
Ограничения на уровень торможения при замедлении | Максимальное замедление 3,5 м/с | Ограничение на величину замедления зависит от скорости транспортного средства. | Максимальное замедление не ограничено. |
Ограничения на рабочую скорость оборудованного системой транспортного средства | Не может ускоряться при скорости ниже 5 м/с. | Способен разгонятся из состояния остановки под управлением водителя. Не может устанавливать скорость ниже 7 м/с. | Не требуется использовать смягчающее торможение при скорости ниже 4,2 м/с. |
Деактивация торможения водителем для замедления | Требуется | Требуется | Требуется |
Деактивация торможения для замедления, если условия критерия торможения больше не выполняются | Требуется | Требуется | Требуется |
Торможение ведет к полной остановке транспортного средства | Не требуется | Требуется | Требуется |
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ISO 15622 | IDТ | ГОСТ Р ИСО 15622-2017 "Интеллектуальные транспортные системы. Системы адаптивного круиз-контроля. Требования к эксплуатационным характеристикам и методы испытания" |
ISO 15623 | - | * |
ISO 22179 | IDT | ГОСТ Р ИСО 22179-2017 "Интеллектуальные транспортные системы. Системы адаптивного круиз-контроля во всем диапазоне скоростей (FSRA). Требования к эксплуатационным характеристикам и методы испытания" |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык международного стандарта ISO 15622. Официальный перевод данного международного стандарта находится в Федеральном информационном фонде стандартов. | ||
Библиография
[1] | ISO 1176 | Road vehicles - Masses - Vocabulary and codes |
[2] | ISO 3833 | Road vehicles - Types - Terms and definitions |
[3] | ISO 6161:1981 | Personal eye-protectors - Filters and eye-protectors against laser radiation |
[4] | ЕСЕ Regulation No. 13-H | Uniform provisions concerning the approval of passenger cars with regard to braking |
[5] | IEC 60825-1:2001 | Safety of laser products - Part 1: Equipment classification, requirements and user's guide (consolidated edition) |
УДК 629.3.018.7:006.354 | ОКС 43.040.15 |
Ключевые слова: интеллектуальные транспортные системы, транспортное средство, системы снижения тяжести последствий от столкновения с движущимся впереди транспортным средством | |
Электронный текст документа
и сверен по:
, 2017
{kind=link}