ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
пнет
339—
2018

ПРЕДВАРИТЕЛЬНЫЙ
НАЦИОНАЛЬНЫЙ
СТАНДАРТ
РОССИЙСКОЙ
ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
СРЕДСТВА МАНЕВРИРОВАНИЯ ПРИ ДВИЖЕНИИ НА НИЗКОЙ СКОРОСТИ
Требования к эксплуатационным характеристикам и методы испытания
(ISO 17386:2010, NEQ)
Издание официальное

Москва
Стандартииформ
2019
ПНСТ 339—2018
Предисловие
1 РАЗРАБОТАН Обществом с ограниченной ответственностью «ТранснавиСофт» (ООО «Транс* навиСофт)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 57 «Интеллектуальные транспортные системы»
3 УТВЕРЖДЕН И 8ВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому ре* гулировакию и метрологии от 31 декабря 2018 г. № 71-пнет
4 Настоящий стандарт разработан с учетом основных нормативных положений международного стандарта ИСО 17386—2010 «Транспортные информационные и управляющие системы. Средства маневрирования при движении на низкой скорости (MALSO). Эксплуатационные требования и процедуры испытания» (ISO 17386:2010 «Transport information and control systems — Manoeuvring Aids for Low Speed Operation (MALSO) — Performance requirements and test procedures». NEO)
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16—211 (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мве до истечения срока его действия разработчику настоящего стандарта по адресу: 127083 г. Москва, ул. Мишина, д. 35 и в Федеральное агентство по техническому регулированию и метрологии по адресу: 109074 Москва. Китайгородский проезд, д. 7. стр. 1.
В случае отмены настоящего стандарта соответствующая информация будет опубликована е ежемесячном информационном указателе «Национальные стандарты» и также будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
© Стандартинформ. оформление. 2019
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения.................................................................1
2 Нормативные ссылки.................................................................1
3 Термины и определения...............................................................2
4 Классификация......................................................................3
5 Функциональные и эксплуатационные требования.........................................4
5.1 Активация средств маневрирования при движении на низких скоростях...................4
5.2 Интерфейс водителя и информационная стратегия....................................5
5.3 Динамические характеристики процедуры обнаружения объекта.........................7
5.4 Покрытие зоны контроля...........................................................7
5.5 Возможности самотестирования и индикация отказа..................................12
5.6 Работа с прицепами.............................................................12
6 Требования к элементам средств маневрирования при движении на низкой схорости
и процедурам испытания..............................................................13
7 Эксплуатационные испытания на обнаружение препятствий................................13
7.1 Объект испытания...............................................................13
7.2 Общие условия окружающей среды................................................14
7.3 Процедура испытания............................................................14
Приложение А (справочное) Методы испытаний............................................16
Библиография.......................................................................18
ПНСТ 339—2018
Введение
Современные дорожные транспортные средства (ТС) с аэродинамическими формами часто ограничивают видимость для водителей при передвижении. Средства маневрирования при движении на низких скоростях (СМДНС) повышают безопасность и удобство водителя ТС при парковке или маневрировании на очень низкой скорости, например в узких проходах. СМДНС помогают водителям избежать столкновения с препятствиями, которые водители могут не заметить, но которые могут быть обнаружены СМДНС. Таким образом, водители могут более эффективно использовать ограниченное парковочное пространство.
СМДНС — это системы обнаружения препятствий с использованием бесконтактных датчиков, которые помогают водителю при маневрировании на дороге при движении на низкой скорости. СМДНС сигнализируют водителю ТС о наличии предметов спереди, сзади или сбоку при въезде на парковочные места в ограниченном пространстве или при маневрировании ТС через узкие проходы. Эти системы рассматриваются как средства помощи водителю при движении со скоростью не более 0.5 м/с. не освобождая при этом от ответственности за соблюдение правил дорожного движения.
ПНСТ 339—2018
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Интеллектуальные транспортные системы
СРЕДСТВА МАНЕВРИРОВАНИЯ ПРИ ДВИЖЕНИИ НА НИЗКОЙ СКОРОСТИ
Требования к эксплуатационным характеристикам и методы испытания
Intelligent transport systems. Maneuvering aids (or low speed operation. Performance requirements and test procedures
Срок действия — с 2019—06—01 до 2022—06—01
1 Область применения
Настоящий стандарт распространяется на легкие транспортные средства (ТС), например легковые автомобили, пикапы, легкие фургоны и спортивные внедорожники (эа исключением мотоциклов), оснащенные системами средств маневрирования при движении на низких скоростях (СМДНС). Настоящий стандарт устанавливает минимальные функциональные требования, предоставляемые СМДНС. т. е. обнаружение и информирование о наличии препятствий в пределах определенной (небольшой) зоны обнаружения, а также минимальные требования, предъявляемые к индикации отказов, эксплуатационным характеристикам и методам испытания. Настоящий стандарт включает в себя основные правила информационной стратегии, но не накладывает ограничений на вид информации или систему индикации (дисплей).
Настоящий стандарт не распространяется на системы улучшения видимости, такие как видеокамеры без функций измерения расстояния и предупреждения.
В настоящем стандарте не рассматриваются устройства реверсирования и устройства обнаружения препятствий на тяжелых коммерческих ТС: требования ккоторым определены в [1].
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ ИСО 15006 Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению звуковой информации внутри транспортного средства
ГОСТ Р ИС015008 Эргономика транспортных средств. Эргономические аспекты информационно-управляющей системы транспортного средства. Требования к представлению визуальной информации внутри транспортного средства и методы их проверки
Прим еча нив — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий гад. Если заменен ссылочный стандарт, на хогорый дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана дати-
Издание официальное
ПНСТ 339—2018
рованная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение. затрагивающее положение, на которое дана осыпка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 звуковая информация и предупреждение: Акустический сигнал, который используется для
предоставления водителю информации о препятствиях.
Пример — Акустические импульсы, речь.
Примечание — Имлугъсы могут кодироваться в основном по несущей частоте, частоте повторения и положению звукового генератора (см. рисунок 1).
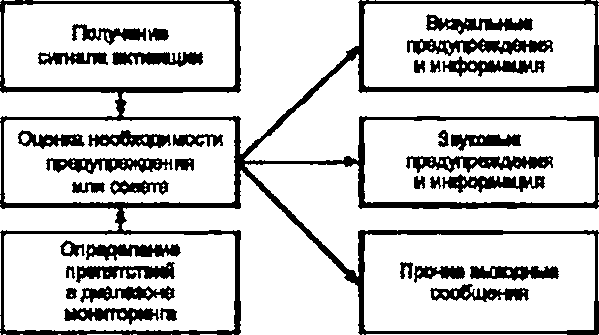
Рисунок 1 — Блок-схема потенциальных подфункций системы помощи при маневрировании на низких скоростях
3.2 система помощи при маневрировании на низких скоростях: Система, которая при движении на низкой скорости (< 0.5 м/с) способна информировать водителя о наличии стационарных препятствий в непосредственной близости от транспортного средства, е основном во время парковки и маневрирования в узких проходах.
3.3 оценка информации и предупреждение: Информация об обнаруженных активированной системой препятствиях будет оцениваться для предупреждения и совета водителю транспортного средства при маневрировании на низкой скорости (см. рисунок 1).
3.4 зона контроля: Определенное трехмерное пространство вокруг транспортного средства, которое делится на части: переднюю зону контроля, переднюю боковую зону контроля, заднюю зону контроля. заднюю зону контроля 1 и заднюю зону контроля 2 (см. рисунок 2).
Примечание — Зоны контроля зависят от предполагаемого использования системы (см. раздел 4).
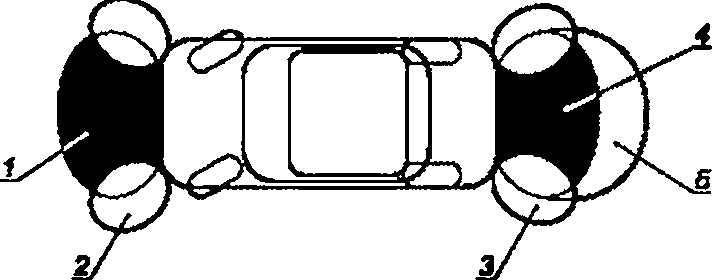
Г — передняя мне контроля: 2 — передняя боковая зона контроля:
3 - задняя боковая зона контроля. 4 — задняя зона контроля t; 5 — задняя зона контроля 2
Рисунок 2 — Зоны контроля (вид сверху)
3.5 реверсивная система обнаружения: Система, которая информирует водителя при включении передачи заднего хода об обнаружении объектов в зоне контроля.
3.6 датчик: Компонент, который обнаруживает объекты е зоне контроля.
Примечание — Существует множество перечисленных ниже принципов, которые можно использовать для обнаружения объектов. Наиболее часто используемым принципом является измерение времени, затрачиваемого на распространение энергии от источника до препятствия и обратно (например, в таких устройствах, как радар, лидар. сонар). Активные сенсорные элементы создают импульсное или непрерывно модулированное поле микроволн, свет (инфракрасный) или ультразвук. Принимается отраженная энергия, связанная с объектом в области обнаружения, и измеряется расстояние до объекта. Боковое положение объекта оценивается на основе характеристик луча или направления поля либо синхронизации датчиков с перекрывающимися зонами действия.
Альтернативные принципы включают измерение расстояния по принципу триангуляции и пассивные сенсорные системы с использованием обработки изображений.
3.7 активация системы: Действие по переводу системы из состояния покоя в активное состояние. при котором система осуществляет мониторинг зоны контроля, оценку обнаруженных объектов и формирование соответствующей обратной связи для оказания помощи водителю.
3.8 объект испытания: Объект из определенного материала, с определенной геометрией и поверхностью для тестирования зоны контроля.
Прим еча нив — При испытании данного объекта должны быть достигнуты сопоставимые результаты для соответствующих типов датчиков.
3.9 визуальная информация и предупреждение: Оптический сигнал, используемый для того, чтобы предоставить информацию о соответствующем препятствии водителю.
Пример — Индикатор, дисплей.
Примечание — Визуальная информация может кодироваться, например цветом, частотой повторения, символами или текстом. Водитель может быть предупрежден непрерывной или пульсирующей сигнализацией, возможно. цветными индикаторами. Информация может быть предоставлена в графической или буквенно-цифровой форме.
3.10 уровни предупреждения: Последовательность критических уровней звуковой/емзуаль-ной/тактильной/кинсстетической информации или обратной связи с водителем относительно опасной внешней среды.
4 Классификация
Разнообразие манер поведения водителей при вождении ТС и рыночный спрос на СМДНС в разных регионах мира напрямую влияют на их классификацию. Например, в одних странах водители маневрируют в труднодоступных местах, полагаясь на предупреждения, подаваемые при малых расстояниях до препятствия; в других странах необходимо, чтобы предупреждения водителю выдавались на относительно большом расстоянии до препятствия. Производитель может выбрать наиболее подходящие параметры СМДНС исходя из стиля вождения и ожиданий целевой группы водителей.
ЛИСТ 339—2018
СМДНС используют устройства обнаружения объектов (датчики) для того, чтобы предоставить водителю информацию, основанную на измерении расстояния до препятствий. Технология датчиков не рассматривается в настоящем стандарте; однако она влияет на процедуры испытания характеристик СМДНС. установленные в настоящем стандарте (см. раздел 7). Объекты испытаний определяются на основе систем, применяющих ультразвуковые датчики, которые наиболее часто используют в данных технологиях на момент публикации настоящего стандарта. В будущем для других технологий обнару» жения эти объекты испытания должны быть проверены и изменены при необходимости.
СМДНС классифицированы в соответствии с их способностью охватывать разные диапазоны кон» троля. Каждый диапазон контроля соответствует определенной зоне вблизи ТС для предотвращения столкновения с препятствием (см. рисунок 2). Класс СМДНС обозначается аббревиатурой соответству» ющей зоны контроля. Могут быть использованы любые комбинации зон контроля, если это соответ» ствует предполагаемому применению СМДНС. Причем СМДНС бокового типа ограничены контролем боковых зон ТС и в основном предназначены для оказания помощи водителю при движении по узким проходам. Для наиболее эффективного использования СМДНС при маневрировании водитель должен быть проинформирован о их типе, которым оборудовано ТС. согласно классификации, указанной в таблице 1.
Таблица 1 — Классификация средств маневрирования для низкоскоростной работы сокращения диапазонов контроля
Зона контроля | Сокращенное обозначение | Расстояние обнаружения, и | Максимальная скорость при маневрировании, м/с |
Задняя — 1 | R1 | 0.6 | 0.3 |
Задняя — 2 | R2 | 1.0 | 0.5 |
Задняя боковая со стороны водителя | Red | 0.5 | 0.3 |
Задняя боковая со стороны пассажира | Rep | 0.5 | 0.3 |
Передняя | F | 0.6 | 0.3 |
Передняя боковая со стороны водителя | Fed | 0.5 | 0.3 |
Передняя боковая со стороны пассажира | Fcp | 0.5 | 0.3 |
5 Функциональные и эксплуатационные требования
5.1 Активация средств маневрирования при движении на низких скоростях
5.1.1 Средства маневрирования при движении на низких скоростях с ручной активацией
СМДНС включаются и выключаются водителем с помощью переключателя или кнопки. После ак»
тивации СМДНС могут сигнализировать о готовности к обслуживанию акустически или визуально. Од» нако данные сигналы должны быть дифференцированными относительно информации о расстоянии до препятствия.
5.1.2 Средства маневрирования при движении на низких скоростях с автоматической ак» тивацией
СМДНС автоматически актиеируются/дезактиеируются е зависимости от реальной ситуации и манеры вождения. Зоны контроля (см. раздел 4) можно активировать отдельно, для того чтобы избежать ненужных сигналов. После автоматической активации информация о готовности к обслуживанию пере» дается водителю. Для отмены автоматической (деактивации могут быть использованы переключатель включения/ выключения или кнопка.
5.1.2.1 Критерии активации
Выбраны передача заднего хода, с одной стороны, и скорость ниже заданного предела Von — с другой.
5.1.2.2 Критерии деактивации
Выбраны передача, кроме задней, скорость за определенным пределом или расстояние, пройденное с момента последней активации СМДНС. более х^. Ограничение скорости Уоп и Votf и пре» дел расстояния xofr могут быть соответствующим образом определены датчиками и предполагаемыми
СМДНС. однако скорости Уоп и Vofl должны быть 2 0.5 м/с или 2 0.3 м/с в зависимости от зоны контроля (см. таблицу 1), так как это — максимальные скорости, поддерживаемые системой.
На ТС с автоматической коробкой передач СМДНС могут быть отключены, если выбрано положение Р (стоянка). При включенном стояночном тормозе также можно отключить СМДНС.
8 таблице 2 показано, каким образом активировать различные существующие зоны контроля.
Таблица 2 — Критерииактиаации/дезактмааииисистемы
Зоны хонтропя | Выбрана передача заднего хода | Выбор передачи, отличной от передачи заднего хода | |
v г Удя или я г к# | |||
Передняя | 0 | + | - |
Передняя боковая | 0 | + | - |
Задняя | + | 0 | - |
Задняя боковая | + | 0 | - |
«0» указывает на необязательность; «+» — на активность; «-» — на неактивность.
5.2 Интерфейс водителя и информационная стратегия
5.2.1 Общая информация
Для интерфейса водителя ТС должен быть использован, как минимум, звуковой информационный канал. Визуальная информация и предупреждение могут быть использованы в качестве дополнения. Стандартизованная информационная стратегия станет основой для разработки обоих типов информационных компонентов, так как способствует использованию, более простому и безопасному в различных ТС. Наиболее значимой информацией для водителя является расстояние между ТС и препятствием. 8 качестве дополнительной информации может быть указано местоположение препятствия относительно ТС. Водитель также должен получать информацию о неисправностях.
Общая информационная стратегия не может быть установлена по следующим причинам;
. существует много различных способов кодирования информации;
- каждый производитель ТС интегрирует средства помощи при маневрировании в информационную систему, предназначенную для водителя, исходя из специфики интерфейса последнего.
Информация, изложенная в 5.2.2—5.2.5. может рассматриваться в качестве руководства при осуществлении информационной стратегии.
5.2.2 Звуковая информация
Звуковая информация должна быть представлена в соответствии с ГОСТ Р ИСО 15006.
Для канала звуковой информации рекомендуется использовать следующий базовый код;
а) расстояние должно быть закодировано как минимум на два уровня. Эти зоны могут быть представлены различными частотами повторения, причем основное правило заключается в том. что высокая частота повторения или непрерывный звук соответствуют коротким расстояниям. При использовании другого или дополнительного кода он не должен быть помехой для основного правила.
б) различные области могут быть представлены различными несущими частотами (например, высокой частотой для передней части ТС, низкой частотой для задней части ТС). В этом случае следует использовать не более двух разных областей/несущих частот. Могут быть также применены синтезированные или записанные голосовые сообщения;
е) активация/деактивация СМДНС и индикация отказа/нарушения могут быть представлены звуковым сигналом, четко различимым от других сигналов.
5.2.3 визуальная информация
визуальная информация должна быть представлена е соответствии с ГОСТ Р ИСО 15008 следующим образом:
а) если канал визуальной информации применяется в качестве дополнения к каналу звуковой информации, рекомендуется использовать нижеприведенный базовый код:
• информацию следует кодировать по крайней мере на два уровня, представленных несколькими цветами: например, красный — для уровня 1 (уровень неминуемого столкновения) и желтый или зеленый — для уровня 2 (уровень внимания). Если использован другой код или дополнительный консультативный уровень, он не должен мешать этим элементам базового кода. Два уровня могут быть раз-
ЛИСТ 339—2018 делены с помощью более чем одного элемента отображения с тем же цветом, например гистограмма с тремя красными и тремя желтыми столбиками, что позволяет кодировать шесть подуровней. Если вместо нескольких цветов применен монохроматический элемент, два уровня могут быть представлены комбинацией непрерывной и мигающей подсветки или набором увеличивающихся по высоте полосок.
На рисунке 3 показаны уровни предупреждения для задней зоны контроля:
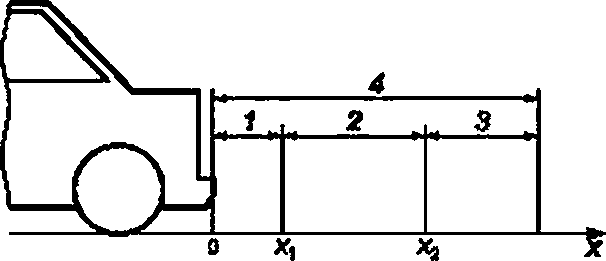
f — уровень 1:3— уровень 2: 3 — реюиемдательиый уровень:
4 — задняя зона контроля: X—■ расстояние до заднего бампера автомобиля
Рисунок 3 — Уровни предупреждения для задней зоны контроля
б) дисплей должен быть расположен таким образом, чтобы минимизировать вероятность изменения направления взгляда водителя. Например, рекомендуется разместить дисплей для задней зоны контроля в задней части салона, так как это позволяет водителям наблюдать за дисплеем, одновременно фиксируя обстановку в зеркало заднего вида или через заднее стекло. По этой же причине рекомендуется располагать дисплей для передней зоны контроля на приборной панели:
в) рекомендуется указывать активацию/деактивацию и неисправность СМДНС с помощью контрольного сигнала или символа на всех активных дисплеях. Используемые символы должны соответствовать ГОСТ ИСО 2575.
5.2.4 Сочетание визуальной и звуковой информации
Сочетание визуальной и звуковой информации может быть использовано как для улучшения работы СМДНС. так и для уменьшения возможной негативной реакции водителя и пассажиров с учетом конкретных преимуществ обоих информационных каналов.
На уровне 1 (уровне неминуемого столкновения) должна быть звуковая информация и дополнительно может быть визуальная информация: однако информация на уровне 2 (уровне внимания) может предоставляться только визуальным или звуковым каналом. Если интенсивность подачи звуковой информации может регулироваться водителем, например с помощью меню человеко-машинного интерфейса (HMI) бортовой системы, в руководстве пользователя или в диалоге с СМДНС должно появиться сообщение о том. что предупреждения могут не восприниматься в нужный момент в том случае, если громкость установлена на слишком низком уровне.
5.2.5 Продолжительность сигнализации
В целом сигнализация о препятствии должна поддерживаться с момента его обнаружения и прекращаться в тот момент, когда препятствие более не обнаруживается или система отключена. Критерии активации/деактивации СМДНС и конкретные диапазоны контроля приведены в 5.1.
Во избежание раздражения водителя СМДНС могут автоматически отключать звуковой сигнал через определенное время (определено производителем). Однако СМДНС должны оставаться в активном состоянии.
Как только расстояние до препятствия сократится, звуковой сигнал снова включается автоматически. В случае увеличения расстояния до препятствия звуковой сигнал может оставаться выключенным.
Если звуковой информационный канал дополняется визуальным индикатором. СМДНС могут автоматически временно отключить звуковой сигнал, как описано выше. Однако визуальная сигнализация должна поддерживаться.
Водитель может выбрать временное подавление звукового сигнала вручную. В этом случае звуковой сигнал должен оставаться подавленным до тех пор. пока водитель не включит его снова; однако звуковой сигнал должен автоматически возобновляться при следующем включении СМДНС. Условия активации приведены в 5.1.
5.3 Динамические характеристики процедуры обнаружения объекта
5.3.1 Относительная скорость объектов
СМДНС должны обнаруживать неподвижные объекты тогда, когда ТС находится в неподвижном состоянии или движется со скоростью не более 0.3 м/с.
СМДНС. классифицированные как R2 (см. раздел 4), должны обнаруживать неподвижные объекты в задней зоне контроля 2 при движении со скоростью не более 0.5 м/с.
5.3.2 Задержка обнаружения при активации средств маневрирования при движении на низких скоростях
Задержка обнаружения при активации СМДНС определена как временной интервал между активацией СМДНС и гем моментом, когда СМДНС предоставляют водителю достоверную информацию о препятствии, присутствующем в рассматриваемом диапазоне контроля.
Примечания
1 Критерт активации могут отличаться для разных диапазонов контроля и определяются разработчиком СМДНС. Возможные варианты приведены в 5.1. При измерении задержки обнаружения следует соблюдать осторожность. для того чтобы обеспечить выполнение критериев активации для диапазона контроля.
Если СМДНС не обеспечивают индикацию готовности к обслуживанию, задержка обнаружения запуска измеряется с момента включения зажигания и работы двигателя.
2 Двигатель считается работающим начиная с того момента, когда напряжение заряда батареи достигло 90 % от типичного напряжения батареи во время запуска двигателя после перерыва в работе.
На одних ТС электронная система управления электропитанием отключает питание СМДНС. если двигатель не работает. В этом случае задержка обнаружения запуска может быть измерена только с момента запуска двигателя. На других ТС. включая гибридные электрические ТС. СМДНС находятся е рабочем состоянии независимо от режима работы двигателя. В таком случае соблюдение следующего требования может быть дополнительно доказано без запуска двигателя, так как измерение задержки обнаружения запуска должно начинаться в тот момент, когда напряжение батареи достигает 90 % от уровня стационарного напряжения после включения пускового выключателя в положение ON.
Задержка обнаружения запуска не должна превышать 1,5 с. Время, необходимое для расчета работы СМДНС и выполнения тестирования элементов СМДНС и датчиков, включается в задержку обнаружения запуска.
Если СМДНС обеспечивают индикацию готовности к обслуживанию — либо звуковую, либо визуальную. либо и то. и другое, задержка обнаружения запуска измеряется с момента окончания индикации готовности к обслуживанию. Средняя задержка обнаружения запуска не должна превышать 600 мс. Это обеспечивает формирование промежутка времени между слышимым звуком тона «готовность для обслуживания» и слышимым звуком тона информационного сигнала СМДНС.
Прим еча нив — В случае использования на ТС других систем (например, навигационного дисплея) для отображения информации, поступающей от СМДНС. появление на экране дисплея окна СМДНС будет рассмотрено как индикация их готовности к работе.
5.3.3 Задержка обнаружения объекта
До тех пор пока СМДНС активны, временная задержка между появлением соответствующего препятствия и представлением правильной информации для водителя не должна превышать 500 мс во всех диапазонах контроля. Эта характеристика подтверждается соответствующей процедурой тестирования с точностью не хуже, чем 1/10 от измеренного времени задержки.
Примеры процедур испытаний приведены в приложении А.
Задержку рассчитывают как среднее арифметическое не менее чем 10 тестов. Средняя задержка индикации в рамках этих испытаний не должна превышать 500 мс. и ни одно значение не должно быть более 600 мс.
5.4 Покрытие зоны контроля
5.4.1 Разделы зоны контроля
Согласно положениям раздела 3 вся зона контроля разделена на пять диапазонов контроля (см. рисунок 2). Каждый диапазон контроля характеризуется своими горизонтальными и вертикальными областями.
ЛИСТ 339—2018
5.4.2 Горизонтальные области контроля
Горизонтальными областями являются двумерные проекции зон контроля на проезжую масть. Ми-нимальные расстояния обнаружения, измеренные от границы ТС. определены в таблице 1.
Первые 0.2 м начиная с границы ТС {см. рисунок 4) не должны проверяться, так как современная технология обнаружения не может гарантировать обнаружение объекта на таком близком расстоянии.
вввввввв
□□□□□□во
вввввввв
□□□□□□□о
□□□□□□□в
□□□□□□□в
□□□□□□□в
вввввввв
вввввввв
□□□□□□□в
вввввввв
вввввввв
0,6
Хи
, _ обье*т испытания. 2 — обнаружен. 3 — не обнаружен. X — расстояние от (ранимы транспортною средства
Рисунок 4 — Определение коэффициента горизонтальной зоны действия в зонах А1 и А?
Для проведения эксплуатационного испытания, описанного в разделе 7. соответствующий диапазон контроля должен сканироваться по горизонтали с объектом испытания Н и по вертикали с объектом испытания V. Каждая позиция сетки обнаружения представлена квадратом с длиной сторон Рх и dy (dx - 0.1 м. dy - 0.1 м — для проверки размеров горизонтальной зоны действия) и его центром в положении продольной оси стандартного препятствия.
Коэффициент зоны действия определен как отношение покрытой площади зоны действия к общей площади данной зоны.
Пример — Для общей площади, включающей 96 ячеек, и закрытой площади, включающей 88 ячеек, средний коэффициент зоны действия составляет 91.7 %. Площадь одного элемента обнаружения определяется как площадь квадрата dx2, соответствующая «необнаруженному» стандартному препятствию.
Примечание — Малой ошибкой из-за переоценки площади целым числом ячеек можно пренебречь.
Для оценки эксплуатационных испытаний диапазон контроля делится на ближнюю зону А,. которая охватывает диапазон от границы ТС на расстояние не более 0.6 м. и зону Aj. которая охватывает диапазон на расстояние более 0.6 м. Эти зоны не связаны с диапазонами уровней предупреждения. Пример показан на рисунке 4 для задней горизонтальной зоны значимости. Коэффициент зоны действия определен отдельно для каждой из указанных двух зон.
5.4.3 Задняя горизонтальная область контроля
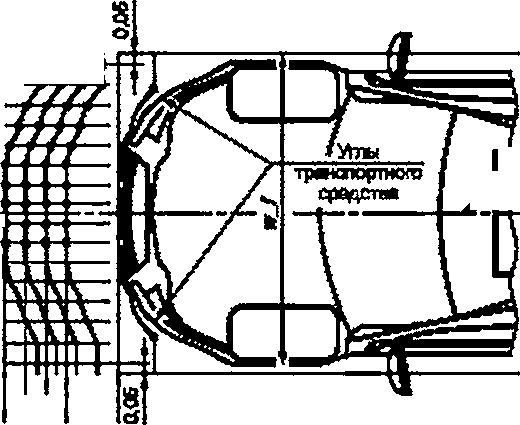
Для того чтобы упростить процедуру проверки производительности, задняя горизонтальная зона контроля представлена прямоугольником, границы которого начинаются на расстоянии 0.2 м от задней
границы ТС и продолжаются до максимального расстояния обнаружения, которое составляет 0.6 м для зоны R1 и 1.0 м для зоны R2.
Ширина прямоугольника w_r равна ширине ТС. измеренной вдоль задней оси. Размеры должны быть округлены до ближайших 0.1 м.
Расположение центра объекта испытания Н внутри этого прямоугольника показано на рисунке 5. Сетка расположена симметрично центральной линии ТС.
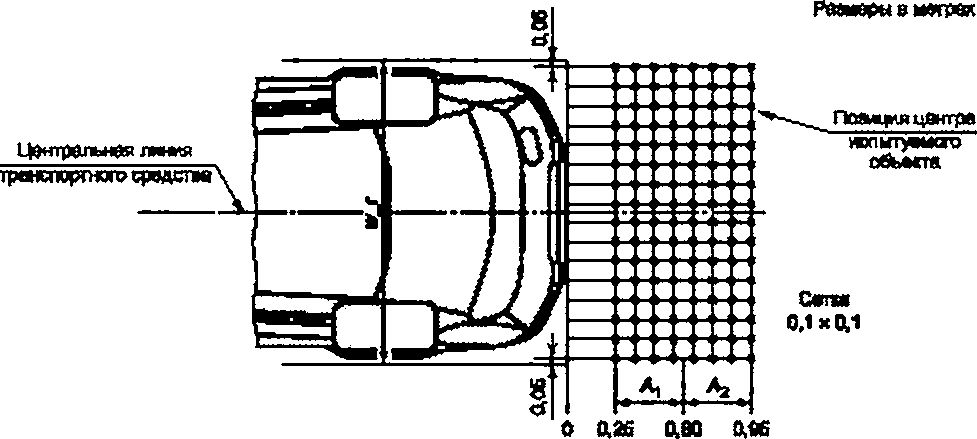
Рисунок 5 — Позиции сетки для проверки горизонтального покрытия задней зоны контроля
5.4.4 Передняя горизонтальная зона контроля
Передняя горизонтальная зона контроля представлена площадью, которая начинается на расстоянии 0.2 м от передней границы ТС и продолжается до максимального расстояния обнаружения, со* ставляющего 0.6 м. Ширина этой зоны w_f равна ширине ТС. измеренной вдоль передней оси. Размеры должны быть округлены до ближайших 0.1 м.
8 отличие от задней горизонтальной зоны контроля, которая представляет собой просто прямоугольник. испытания положения ячеек сетки передней горизонтальной площади расположены на участке. который следует за контуром переднего бампера. Бампер имеет отличительную выпуклую форму на многих ТС. Существует два разных метода построения тестовой сетки, которые дают сравнимые результаты испытания. Инженер-испытатель, ответственный за проведение испытания, может выбрать метод, который наилучшим образом соответствует возможностям имеющегося тестового оборудования. В любом случае сетка расположена симметрично центральной линии ТС.
5.4.4.1 Метод 1
Линии, перпендикулярные направлению движения, заменяются кривыми, которые следуют за формой переднего бампера. Каждая кривая смещается параллельно в направлении движения на расстояние. кратное 0.1 м. С использованием этих кривых вместо прямых линий расстояние до препятствий в направлении движения всегда относится к поверхности ТС, даже в случаях с чрезвычайно круглыми или стреловидными передними бамперами. Кривая следует за формой переднего бампера (вертикальная проекция на землю, как показано на рисунке 6) между двумя «построенными углами ТС». Для обнаружения углов влево и вправо от них кривая завершается прямыми секциями, перпендикулярными направлению движения, для того чтобы покрыть всю ширину ТС ку_/{см. рисунок 7).
ПНСТ 339—2018
Позиции титра 111
испытуемого овмигта
Фермвлврвритр ^4 Фаилера
Сот®
0.1 «0.1
t -ареною
Сде 0,25 О
Помары ■ метрах
Р цаитдоьиая линия
рпюгр средстве
Примечание — Позиция центра объекта испытания показана только а верхней части рисунка (правая сторона ТС).
Рисунок 6 — Позиции сетки для проверки гориэонтагъного охвата диапазона передней зоны контроля по методу 1
5.4.4.2 Метод 2
Построенная сетка по-прежнему прямоугольная, похожая на сетку для задней горизонтальной зоны контроля. Однако проверенные позиции сетки вырезаются из прямоугольника двумя кривыми, которые повторяют форму переднего бампера (вертикальная проекция на землю, как показано на рисунке 7). между двумя «построенными углами ТС». Построение углов показано на рисунке 8. Слева и справа от углов кривая завершается прямыми секциями, перпендикулярными направлению движения, для того чтобы покрыть всю ширину ТС w_f.
Первая кривая отстоит на расстоянии 0.2 м от бампера, измеренном на центральной линии ТС; вторая кривая — 0.6 м от бампера.
Рашеры а метрах
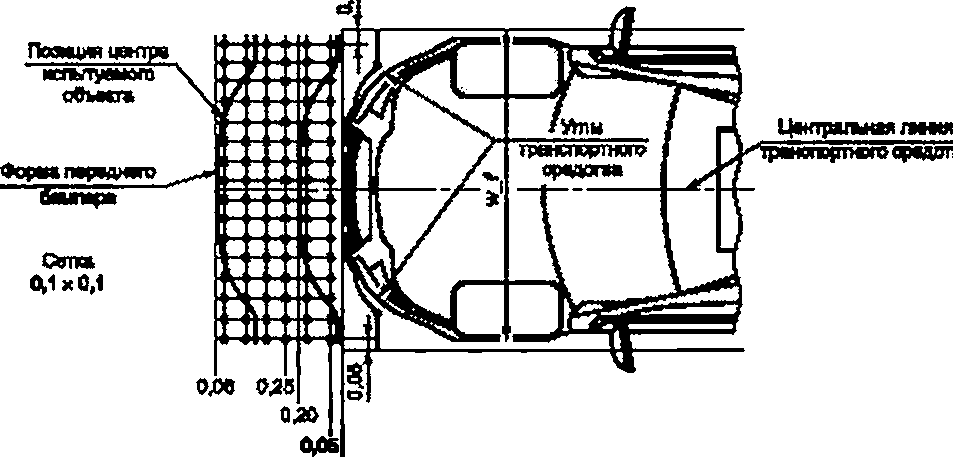
Рисунок 7 — Позиции сетки для проверки горизонтального покрытия передней зоны контроля по методу 2
5.4.5 Угловые горизонтальные зоны контроля
Для определения угловых горизонтальных зон контроля используют метод «Определение куба»:
• рисуют прямоугольник, охватывающий контур ТС:
- рисуют линии от каждого угла прямоугольника до ТС под углом 45*;
• пересечения этих линий и границы ТС являются его углами;
• эллиптические области в каждом углу указывают горизонтальные области, которые являются значимыми для оценки и будут использованы в процедуре испытания с применением семи квадратных позиций сетки со сторонами dx-dy- 0.1 м. центры которых соответствуют позициям от продольной оси стандартного испытательного препятствия (см. рисунок 8);
- наклон эллипсов к прямому/обратному направлению составляет 30* для задних углов и 45° для передних углов.
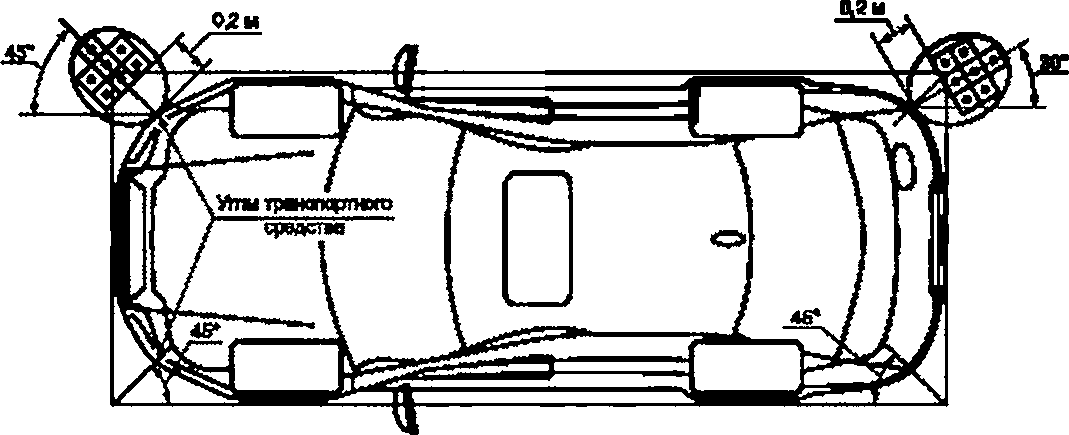
Рисунок 8 — Метод «Определение кубе» для нахождения углов транспортного средства и построения минимальных диапазонов обнаружения угла
5.4.6 Минимальные коэффициенты покрытия
Минимальные требуемые значения коэффициентов покрытия для передних и задних горизонтальных зон контроля следующие:
• 90 %— для А,;
- 87 % — для зоны контроля R2 в Aj.
Минимальные коэффициенты покрытия для угловых зон значимости должны быть равны 100 %. В пределах всей зоны контроля должно быть не более двух смежных непокрытых квадратов обнаружения в горизонтальной плоскости, расположенных по прямой, горизонтально, вертикально или диагонально.
5.4.7 Вертикальные зоны контроля
Для того чтобы упростить процедуру проверки эксплуатационных характеристик, вертикальные зоны контроля представлены прямоугольниками, которые отступают на 0.2 м от границы ТС и прости* раются до максимального расстояния обнаружения в конкретном диапазоне контроля {см. раздел 4). В передней и задней зонах контроля испытание должно быть проведено с использованием объекта испытаний V. расположенного в вертикальной плоскости, совпадающей с продольной осью ТС. Опре* деление углов поворота угловых вертикальных площадей по отношению к границе ТС приведено на схемах зон горизонтального контроля, показанных на рисунке 8.
Для проверки вертикального покрытия достаточно использовать сетку 0.2 м (Ас - dy = 0.2 м). так как способность покрывать всю площадь без чрезмерных отверстий уже доказана проверкой горизонтальных площадей. Высота прямоугольников составляет 0.6 м. что соответствует трем линиям квадратов сетки, центры которых соответствуют положениям продольной оси стандартного испытания препятствия.
ЛИСТ 339—2018
Пример для диапазона задней вертикальной зоны контроля показан на рисунке 9.
Центр нижней линии должен находиться над землей на высоте 0.30 м. Для того чтобы обеспечить
характеристики углового обнаружения и разную высоту установки общих датчиков, должна быть покры-та по меньшей мере одна ячейка в колонке А (ближайшая к бамперу).
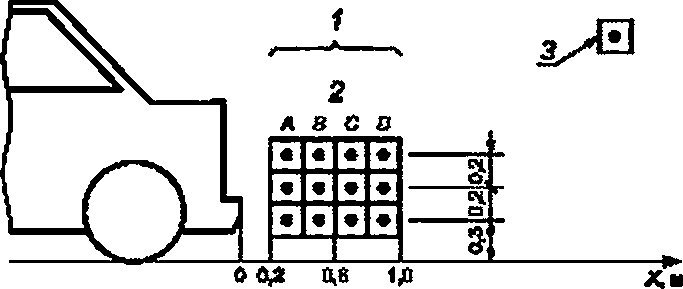
) — задняя вертикальная зона контроля: 2 — колонки. 3 — элемент сетки объекта испытания, X — расстояние от границы транспортного средства
Рисунок 9 — Определение коэффициента покрытия задней вертикальной зоны по процедуре испытания
Минимальное покрытие должно быть таким, как определено в таблице 3. Расстояния обнаруже-ния в разных зонах контроля указаны в таблице 1.
Таблица 3 — Вертикальное покрытие (минимальное количество покрытых клеток)
Зона контроля | Диапазон контроля | |||
Колонка | ||||
А | В | с | О | |
Задняя 2 | 1 | 2 | 2 | 1 |
Задняя 1 и передняя | 1 | 2 | 0 | 0 |
Задняя и передняя угловые | 1 | 1 | 0 | 0 |
5.5 Возможности самотестирования и индикация отказа
СМДНС должны обеспечивать следующие функции самотестирования (по крайней мере, после каждой активации СМДНС):
а) блок самодиагностики должен проверять работу электронных компонентов СМДНС;
б) блок самотестирования должен проверить наличие или отсутствие повреждений сенсорных элементов, которые могут приводить к неисправности СМДНС.
Процедуры а) и б) должны:
• выполняться автоматически для обнаружения отказов, приводящих к сбою в работе системы;
• генерировать предупреждающий сигнал (см. перечисление в) 5.2.2 и перечисление в) 5.2.3] при обнаружении неисправности.
5.6 Работа с прицепами
5.6.1 Учет наличия прицепного устройства
Прицепное устройство, установленное на ТС, может повлиять на правильную работу датчиков, с одной стороны, и продлить заднюю границу ТС. с другой стороны.
Если используется съемное сцепное устройство для прицепа, необходимо убедиться в том. что установка сцепного устройства не приведет к плохому покрытию задней зоны контроля. Следует учи* тывать. что сцепное устройство, скорее всего, будет выступать за бампер и. таким образом, определит границу ТС.
Если надлежащее функционирование с установленным устройством не может быть выполнено. СМДНС должны автоматически отключаться при установке сцепного устройства или водитель должен иметь возможность деактивировать СМДНС вручную. В руководстве пользователя ТС должна быть в этих случаях описана соответствующая операция.
5.6.2 Работа системы с прицепом
Для СМДНС. которые не могут быть деактивированы вручную, электрическая цепь ТС должна быть спроектирована таким образом, чтобы система обнаружения препятствий при движении задним ходом автоматически отключалась при подключении электрического контакта между буксирующим ТС и прицепом. Однако если прицеп оснащен совместимыми датчиками, они должны в этом случае информировать водителя о препятствиях при движении задним ходом.
6 Требования к элементам средств маневрирования при движении на низкой скорости и процедурам испытания
Элементы СМДНС должны быть спроектированы в соответствии с конкретными требованиями к ТС. Это должно быть подтверждено стандартизованными процедурами испытаний, определяемыми производителем.
7 Эксплуатационные испытания на обнаружение препятствий
7.1 Объект испытания
7.1.1 Определение стандартного объекта испытания
Целью подраздела 7.1 является определение требований, предъявляемых к стандартным обь* ектам испытаний, которые будут использованы при испытании возможности обнаружения препятствий системой.
П р и м вча н и е — Если определенные технологии обнаружения требуют соблюдения условий другого стандарта. это необходимо дополнительно исследовать и оценивать. Пластиковая труба для ультразвуковых систем выбрана потому, что она коммерчески доступна, легхо заменяется в случае потери или повреждения и легко переносится. По тем же причинам выбрана металлическая труба для радиолокационных систем. Кроме того, она обеспечивает четкую сигнатуру поперечного сечения радара (RCS) для любой заданной частоты.
Признано, что эти объекты испытания будут представлять разные характеристики для разных датчиков. но это верно для любого выбранного объекта. Цель состоит в том. чтобы сохранить постоянный объект испытания, который является репрезентативным, по меньшей мере, для некоторых ожидаемых объектов приложения реального мира (например, для круглого деревянного, металлического или бетонного столбика).
Свойства геометрии, отражения и поглощения испытуемого объекта должны приводить к легкому тестированию и правильному представлению реального препятствия. Стандартное препятствие не должно отдавать предпочтение одному из физических принципов и представлять собой наиболее значимые объекты в реальных ситуациях маневрирования. Цель стандартизации объекта испытания заключается в том. чтобы можно было разработать и изготовить варианты (системы), представляемые различными поставщиками, с сопоставимыми характеристиками для обеспечения выполнения минимальных требований со стороны водителя.
7.1.2 Ультразвуковые системы
Проведены измерения отражательной способности на соответствующих объектах (см. таблицу 4).
ПНСТ 339—2018
Таблица 4 — Объекты испытания для ультразвуковых систем
Объект испытания | Диапазон контроля | Материал | Диаметр. мм | Длина | |
Испытания Н | Горизонтальная площадь. | Дерево, металл или твердый пластик | 75 | — | |
Испытания V | Вертикальная площадь | Задняя зона 1. задняя зона 2. передняя зона | Дерево, металл или твердый пластик | 75 | Длина равна ширине бампера испытуемого ТС плюс 20% до 40% |
Углы | Дерево, металл или твердый пластик | 75 | — |
В ходе экспериментов установлено, что отражение ультразвукового сигнала существенно не меняется для объектов, произведенных из разных материалов, если поверхность гладкая и «твердая» для звука. Например, металлические и деревянные столбики имеют ту же звуковую отражательную способность, что и пластиковые столбики одинакового диаметра. Следует отметить, что для испольэо-вания в качестве объекта испытания металлические столбики более жесткие и могут быть более точно изготовлены.
7.1.3 Радиолокационные системы
Проведены измерения отражательной способности на соответствующих объектах. Согласно результатам этих испытаний используемые в испытаниях трубы подходят в качестве представления реальных объектов, которые обнаружены системами, использующими радиолокационные датчики (см. таблицу 5).
Таблица 5 — Объекты испытания для радиолокационных систем
Объект испытания | Диапазон контроля | Материал | Диаметр, мм | Длина | |
Испытание Н | Горизонтальная площадь | Металл | 25 | — | |
Испытание V | Вертикальная площадь | Задняя зона 1. задняя зона 2. передняя зона | Металл | 25 | Длина равна ширине бампера испытуемого ТС от плюс 20 % до 40 % |
Углы | Металл | 25 | — |
7.2 Общие условия окружающей среды
Во время испытания скорость ветра не должна превышать 5.4 м/с (сила ветра — 3 балла).
Температура должна составлять от 5 °C до 30 вС в условиях, не предусматривающих осадки (дождь, мокрый снег, снег и т. д.).
Испытания следует проводить на плоской, сухой, асфальтированной или бетонной горизонтальной поверхности.
На испытания не должны влиять различного рода отражения, звуковые, электромагнитные волны, исходящие от стен в окружающей среде, а также вспомогательное испытательное оборудование или другие объекты.
7.3 Процедура испытания
7.3.1 Настройка испытания
Эксплуатационные испытания выполняют на ТС или испытательной конструкции, позволяющей воспроизводить условия установки выбранной модели или выбранного ТС. Если ТС используют для проведения испытания, оно должно иметь массу, равную его снаряженной массе с допустимым отклонением ♦ 5 %. Если клиренс регулируется, он должен быть установлен е нормальное положение, соответствующее условиям движения на асфальтированных дорогах.
Поверхности датчиков должны быть чистыми.
В зависимости от класса средства маневрирования (см. раздел 4) эффективность обнаружения должна проверяться в задней, передней или боковой зоне контроля.
7.3.2 Испытание 1 — покрытие горизонтальных зон контроля
7.3.2.1 Испытание
Располагают испытуемый объект Н перпендикулярно земле е диапазоне контроля таким образом, чтобы его продольная ось жестко располагалась е положениях сетки в соответствии с пунктом 5.4.2. Если соответствующая горизонтальная площадь зависит от угла поворота рулевого колеса, то ислыта* ние проводят с рулевым управлением в нейтральном (прямолинейном) положении.
7.3.2.2 Оценка
Проверяют коэффициент покрытия для каждой части горизонтальной зоны контроля. Обнаружение должно осуществляться однозначно, с непрерывной подачей сигнала, соответствующего уровню предупреждения. Минимальный коэффициент покрытия, определенный в пункте 5.4.2. должен быть достигнут в каждой части горизонтальной зоны контроля.
7.3.3 Испытание 2 — покрытие вертикальных зон контроля
7.3.3.1 Испытание
Закрепляют испытуемый объект V в жестком горизонтальном положении в диапазоне контроля с его трехмерным центром, расположенным в соответствующих положениях сетки (сетка должна охваты* вать вертикальную зону е соответствии с 5.4.7).
7.3.3.2 Оценка
Информация приведена в 7.3.2.2.
ЛИСТ 339—2018
Приложение А (справочное)
Методы испытаний
В настоящем приложении указан метод испытания для оценки времени реакции СМДНС (см. 5.3.3). Пример тестовой установки для времени реакции системы показан на рисунке А.1
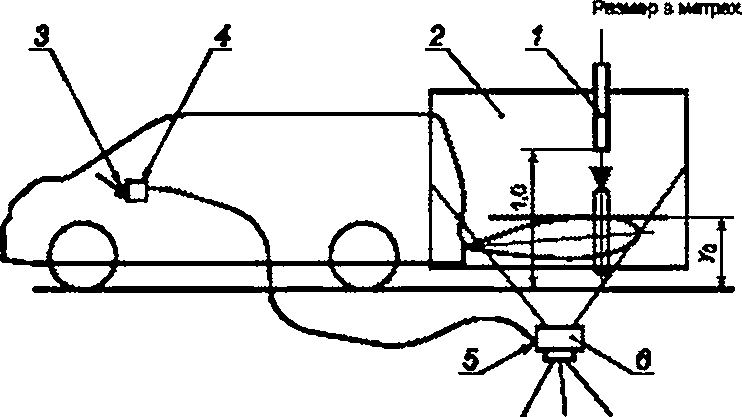
, — мишень испытания. 2 — размер и положение границ съемки видеокамерой: 3 — источник звукового предупреждения СМДНС: 4 — микрофон. 6 — звуковой вход: в — видеокамера
Рисунок АЛ — Пример тестовой установки для времени реакции системы
Точность метода измерения составляет одну десятую часть измеренного времени.
Последовательность испытания представлена следующим образом:
а) подготавливают видеокамеру.
б) вводят выходной сигнал от микрофона, который подключен для сбора звука звукового предупреждения, к звуковому входу видеокамеры:
в) фиксируют видеокамеру для того, чтобы записать видео цели испытания, которая опускается с разумной высоты в диапазон контроля. Расстояние от испытуемого объекта до границы ТС должно составлять прибгызи-тельно 80 % от указанного максимального расстояния обнаружения в соответствующей зоне контроля. Ориентировочное расстояние испытуемого объекта составляет 0.4 м в боковой зоне контроля. 0.5 м — в зонах F и R1 и 0.8 м — в зоне R2. Если завод — изготовитель ТС или СМДНС указывает максимальное расстояние обнаружения, превышающее 1.2 м в зоне R2. то исгытуемый объект в данном случав должен быть расположен на расстоянии 1,0 м. Выбирают точное положение для того, чтобы объект испытания был безошибочно обнаружен после его удаления:
г) включают видеокамеру и начинают запись:
д) очень медленно опускают мишень испытаний в зону контроля. Останавливают мишень испытаний 8 по-эиции у0. когда СМДНС начинает выдавать предупреждающий сигнал. Записывают эту позицию с помощью видеокамеры;
е) сбрасывают мишень испытаний с разумной высоты, например 1.0 м. в зону контроля и записывают на видеокамеру как движение мишени испытаний, так и звук сигнала предупреждения.
Время реакции системы равно времени, прошедшему с момента прохождения мишенью испытаний позиции Уф до начала звукового предупреждения.
Пример отображения результата испытания показан на рисунке А.2.
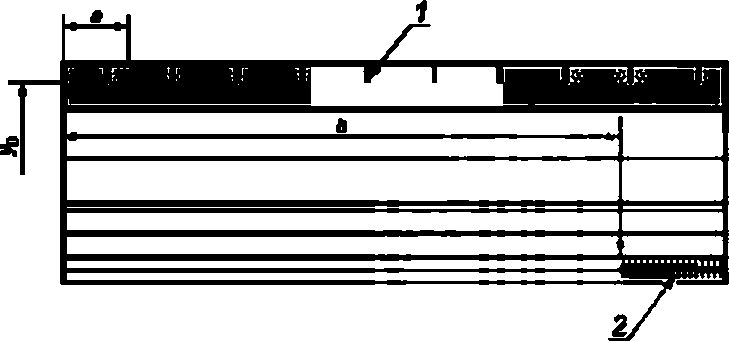
I — объект испытания: 2 — звук предупреждения, а — 1 кадр » 33 мс: 6 — в кадр ■ 264 ис
Примечание — Задержка составляет 264 мс с точностью около 33 мс.
Рисунок А.2 — Пример результата испытания
В другой версии этого метода испытания (с разумной ценой и более высокой точностью) используют аналогичную испытательную настройку, но с электронным сехундомером. а не видеокамерой.
Секундомер запускается световым барьером для начала измерения. Световой барьер устанавливается в положение высоты уд для того, чтобы начать измерение в тог момент, когда контрольная мишень входит в зону обнаружения.
Микрофон, который устанавливают в положении водителя в ТС или в непосредственной близости от звукового излучателя СМДНС. использован для остановки секундомера в тот момент, когда СМДНС начинают акустическое оповещение.
Необходимо следить за тем. чтобы другие звуки, которые могли бы остановить часы, не учитывались микрофоном. например когда объект падает на землю.
ПНСТ 339—2018
Библиография
[1J ISO/TR 12155
[2] ИСО 2575
Грузовые транслоргные средства. Устройства обнаружения препятствия при движении задним ходом. Требования к характеристикам и методы проверки (Commercial vehicles — Obstacle detection device during reversing — Requirements and tests)
Транспорт дорожный. Символы для органов управления, индикаторов и сигнагьных устройств (Road vehicles — Symbols for controls, indicators and tett-tales)
УДК 629.3.018.7:006.354 ОКС 43.040.15
Ключевые слова: интеллектуальные транспортные системы, транспортное средство, средства маневрирования при движении на низкой скорости, методы испытаний
БЗ 2—2019/30
Редактор Л.С. Зимилова Технический редактор И.Е. Черепкова Корректор М.И. Першина Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 31.01.2019. Подписано о почать 05.02.2019. Формат вО*84М. Гарнитура Ариал. Уел. леч. п. 2.79 Уч.-изд. л. 2.S1.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано а единичном исполнении .
117416 Москва. Нахимовский пр-т. д. 31. к. 2.
{kind=link}