ГОСТ 27122-86
Группа Т51
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
Роботы промышленные агрегатно-модульные
МОДУЛИ ЭЛЕКТРОМЕХАНИЧЕСКИЕ.
Типы, основные параметры
Industrial aggregate-module robots. Electromechanical modules.
Types, main parameters
ОКП 38 7500
Срок действия с 01.01.88
до 01.01.93*
_______________________________
* Ограничение срока действия снято постановлением
Госстандарта СССР от 13.12.91 N 1947 (ИУС N 3, 1992 год). -
.
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. ИСПОЛНИТЕЛИ:
А.Г.Баранов, канд. техн. наук; В.В.Слепцов; А.Г.Гринфельдт; С.В.Крюков; В.В.Крупнов; О.Б.Корытко, канд. техн. наук; С.И.Колпашников, канд. техн. наук; С.В.Белоликов
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам 27 ноября 1986 г. N 3585
3. ВВЕДЕН ВПЕРВЫЕ
ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение НТД, | Номер пункта, подпункта, |
ГОСТ 8592-79 | 2.8 |
ГОСТ 12126-71* | 2.8 |
ГОСТ 18709-73 | 2.8 |
_______________
* На территории Российской Федерации действует ГОСТ 12126-86, здесь и далее по тексту. - .
Настоящий стандарт распространяется на электромеханические модули (далее - модули) - узлы агрегатно-модульных промышленных роботов, осуществляющие преобразование входного электрического сигнала в механическое перемещение выходного звена узла и выдачу информационных сигналов, соответствующих скорости и (или) перемещению выходного звена узла и (или) двигателя.
Стандарт устанавливает типы, основные параметры модулей.
1. ТИПЫ
1.1. Стандарт устанавливает типы модулей:
1 - с линейным перемещением выходного звена;
2 - с угловым перемещением выходного звена.
1.2. Стандарт устанавливает обозначение модулей:
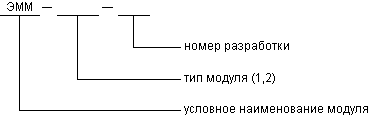
Пример условного обозначения модуля типа 2 с номером разработки 15:
ЭММ-2-15 ГОСТ 27122-86
2. ОСНОВНЫЕ ПАРАМЕТРЫ
2.1. Основные параметры модуля:
номинальная мощность электродвигателя;
номинальное входное напряжение;
номинальный входной ток;
номинальный момент на выходном звене;
номинальное усилие на выходном звене;
разрешающая способность датчика положения.
2.2. Значение номинальной мощности электродвигателя следует выбирать из ряда 10; 25; 40; 60; 90; 120; 180; 250; 550; 1100; 2200; 3000; 4000; 5500; 7500 Вт. Предельные отклонения - ±10%.
2.3. Значение номинального входного напряжения следует выбирать из ряда: 12; 24; 36; 110; 220; 380 В. Предельные отклонения - ±20%.
2.4. Номинальный входной ток модуля должен соответствовать номинальному входному току применяемого электродвигателя.
2.5. Значение номинального момента на выходном звене следует выбирать из ряда: 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630; 1000; 2500; 4000; 6300 Н·м. Предельные отклонения - ±20%.
2.6. Значение номинального усилия на выходном звене следует выбирать из ряда: 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630; 1000; 2500; 4000; 6300 Н. Предельные отклонения - ±20%.
2.7. Значение разрешающей способности датчика положения следует выбирать из ряда: 2; 2
; 2
; 2
; 2
; 2
; 2
отсчетов - для кодовых датчиков; 64; 128; 256; 512; 1024; 2048 импульс/оборот - для импульсных датчиков
.
2.8. Значения присоединительных размеров модулей должны соответствовать ГОСТ 8592-79, ГОСТ 12126-71, ГОСТ 18709-73.
Электронный текст документа
и сверен по:
М.: Издательство стандартов, 1987
{kind=link}