ГОСТ 27803-91
Группа E71
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
ЭЛЕКТРОПРИВОДЫ РЕГУЛИРУЕМЫЕ ДЛЯ МЕТАЛЛООБРАБАТЫВАЮЩЕГО
ОБОРУДОВАНИЯ И ПРОМЫШЛЕННЫХ РОБОТОВ
Технические требования
Controlled electric drives for metal working equipment and industrial robots.
Technical requirements
ОКП 34 3150
Срок действия с 01.01.92
до 01.01.97*
_______________________________
* Ограничение срока действия снято по протоколу N 7-95
Межгосударственного Совета по стандартизации,
метрологии и сертификации (ИУС N 11, 1995 год). -
.
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством электротехнической промышленности и приборостроения СССР
РАЗРАБОТЧИКИ
А.Г.Иванов, канд. техн. наук; Н.В.Донской, канд. техн. наук (руководители разработки); Е.Н.Корнева; Г.Н.Сушенцова
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 05.04.91 N 442
3. Срок первой проверки - 1995 г., периодичность проверки - 5 лет
4. Стандарт содержит все требования СТ СЭВ 7005-90. В стандарт включены дополнительные требования по безопасности, устойчивости к внешним воздействиям при эксплуатации, транспортировании и хранении
5. ВЗАМЕН ГОСТ 27803-88
6. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение НТД, на который дана ссылка | Номер пункта, приложения |
ГОСТ 2.709-89 | Приложение 2 |
ГОСТ 12.1.004-85 | 2.10.3 |
ГОСТ 12.2.007.0-75 | 2.10.2 |
ГОСТ 12.2.007.7-83 | 2.10.1 |
ГОСТ 12.2.009-80 | 2.10.1 |
ГОСТ 183-74 | 2.4.6, 2.6.6 |
ГОСТ 2479-79 | 2.11.3 |
ГОСТ 8592-79 | 2.11.6 |
ГОСТ 12379-75 | 2.11.4 |
ГОСТ 14254-80 | 2.11.1 |
ГОСТ 15150-69 | 2. 9.1 |
ГОСТ 15543.1-89 | 2.9.1 |
ГОСТ 15963-79 | 2.9.2 |
ГОСТ 16372-84 | 2.11.5 |
ГОСТ 16921-83 | 2.11.4 |
ГОСТ 17494-87 | 2.11.3 |
ГОСТ 17516.1-90 | 2.9.3, 2.9.4 |
ГОСТ 21130-75 | 2.11.2 |
ГОСТ 23216-78 | 2.9.5 |
Настоящий стандарт распространяется на электроприводы постоянного и переменного тока с длительным моментом на валу от 0,035 до 170 Н·м для механизмов подачи металлообрабатывающих станков, в том числе с числовым программным управлением (ЧПУ), для исполнительных механизмов промышленных роботов (ПР), механизмов гибких производственных систем (ГПС) и кузнечно-прессового оборудования (КПО), а также на электроприводы постоянного и переменного тока мощностью от 1,1 до 320 кВт для механизмов главного движения металлорежущих станков, в том числе с ЧПУ и КПО (далее - электроприводы).
Требования настоящего стандарта являются обязательными.
Пояснение терминов приведено в приложении 1.
Рекомендации по конструктивной и схемной унификации приведены в приложении 2.
1. КЛАССИФИКАЦИЯ
Электроприводы подразделяются по признакам, приведенным в пп.1.1-1.8.
1.1. По виду двигателя:
постоянного тока;
переменного тока.
1.2. По виду преобразователя:
тиристорные;
транзисторные (транзисторно-тиристорные).
1.3. По виду обратной связи:
с обратной связью по скорости (регулируемые по скорости электроприводы);
с обратной связью по положению;
без обратной связи по скорости и положению.
1.4. По числу координат:
однокоординатные;
многокоординатные.
1.5. По виду конструктивного исполнения преобразователя:
кассетные;
блочные (модульные);
в шкафу (в защитной оболочке).
1.6. По наличию изменения направления вращения электродвигателя:
реверсивные;
нереверсивные.
1.7. По виду управления:
аналоговые;
цифровые;
цифроаналоговые.
1.8. Электроприводы главного движения также подразделяются по способу регулирования скорости:
однозонные (с постоянным моментом);
двухзонные (с постоянными моментом и мощностью).
2. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
2.1. Требования к составу электроприводов
В состав электроприводов в зависимости от типа и схемы управления входят:
электродвигатель с набором необходимых для функционирования электропривода встроенных или пристроенных датчиков и устройств;
силовой полупроводниковый преобразователь;
автоматический выключатель или предохранители для защиты от коротких замыканий;
силовой согласующий трансформатор или автотрансформатор, или сетевой реактор (при необходимости);
сглаживающий реактор (при необходимости);
блок питания (при необходимости);
блок рекуперации (при необходимости).
2.2. Требования к питающей сети
Питание электропривода производится от трехфазной промышленной сети переменного тока с линейными напряжениями: 220, 380, 440, 500 В частотой 50 (60) Гц (допускаются и другие напряжения питающей сети).
2.3. Электроприводы должны обеспечивать работоспособность при:
отклонениях напряжения питающей сети от плюс 10 до минус 15% от номинального значения;
отклонениях частоты питающей сети ±2% от номинального значения;
кратковременных провалах мгновенных значений питающего напряжения площадью ![]() 400, где
400, где - длительность провала в электрических градусах,
- глубина провала в процентах от мгновенного значения напряжения, причем максимальная длительность провала не должна превышать 40 электрических градусов, а глубина - не более 100%.
2.4. Требования к основным техническим параметрам электроприводов подачи станков и промышленных роботов с обратной связью по скорости
2.4.1. Величина скорости должна быть пропорциональна величине входного аналогового сигнала или его цифрового эквивалента. Направление вращения должно определяться полярностью входного сигнала или при помощи дополнительного сигнала. Напряжению 10 В соответствует максимальное значение скорости. Допускаются исполнения с напряжением меньшим 10 В.
2.4.2. Электропривод должен обеспечивать возможность управления по одному или более входам с входным сопротивлением не менее 2 кОм.
2.4.3. Длительный момент электроприводов при скорости, равной нулю, должен выбираться из следующего ряда моментов двигателей: 0,035; 0,047; 0,07; 0,1; 0,13; 0,17; 0,23; 0,35; 0,47; 0,7; 1,0; 1,3; 1,7; 2,3; 3,5; 4,7; 7,0; 10; 13; 17; 23; 35; 47; 70; 100; 130; 170 Н·м.
2.4.4. Электроприводы с цилиндрическими двигателями в зависимости от исполнения по максимальной скорости подразделяются на 3 класса в соответствии с табл.1.
Таблица 1
Длительный момент | Максимальная скорость | ||
Класс 1 | Класс 2 | Класс 3 | |
От 0,035 до 0,23 | 4000 | 6000 | - |
Св. 0,23 " 2,3 | 2000 | 4000 | 6000 |
" 2,3 " 23 | 2000 | 3000 | 6000 |
" 23 " 70 | 1000 | 2000 | 3000 |
" 70 " 170 | 1000 | 1500 | 2000 |
2.4.5. Электроприводы с дисковыми двигателями в зависимости от исполнения по максимальной скорости подразделяются на 2 класса в соответствии с табл.2.
Таблица 2
Длительный момент | Максимальная скорость | |
класс 1 | класс 2 | |
От 0,1 до 2,3 | 3000 | 6000 |
Св. 2,3 " 7,0 | 3000 | 4000 |
" 7,0 " 47 | 3000 | - |
2.4.6. Электроприводы должны обеспечивать следующие режимы работ по ГОСТ 183:
длительный (режим S1);
кратковременный (режим S2);
повторно-кратковременный (режим S3);
повторно-кратковременный с частыми реверсами (режим S7).
При этом моменты определяются в зависимости от скорости в соответствии с характеристиками двигателей, приведенными в информационных материалах, но с максимальным и средним квадратичным токами преобразователей (блоков регулирования) и двигателей, не превышающими паспортные данные.
В режиме S1 в диапазоне скоростей от до 0,25
должен обеспечиваться длительный момент
, равный
на скорости 0,5
- не менее 0,8
, а на скорости
должен обеспечиваться длительный момент не менее 0,5
.
2.4.7. Абсолютные значения допустимых погрешностей скорости электроприводов и значения коэффициента неравномерности вращения в системе злектропривода с обратной связью по скорости приведены в табл.3.
Таблица 3
Скорость | Погрешность скорости, %, не более | Коэффициент неравномерности вращения | ||
суммарная | при изменении нагрузки | при изменении направления вращения | ||
0,5 | 0,1 | 0,1 | 0,02 | |
0,1 | 2,0 | 0,75 | 0,75 | 0,05 |
0,01 | 5,0 | 2,0 | 2,0 | 0,1 |
0,001 | 10,0 | 3,5 | 3,5 | 0,1 |
0,0001 | 25,0 | 10,0 | 10,0 | 0,25 |
Примечания:
1. Значения погрешности скорости в пределах поддиапазона изменяются линейно.
2. Значения погрешности скорости и коэффициента неравномерности вращения в табл.3 вычисляются в соответствии с приложением 1.
2.4.8. Среднее значение углового ускорения при нагрузке электропривода дополнительным моментом инерции, равным ![]() при скорости 0,5
при скорости 0,5 должно соответствовать значениям, указанным в табл.4.
Таблица 4
Длительный момент | Среднее значение углового ускорения |
До 0,35 | 5000 |
Св. 0,35 до 1,7 | 4000 |
" 1,7 " 7,0 | 3000 |
" 7,0 " 23 | 1700 |
" 23 " 47 | 1250 |
" 47 " 100 | 1000 |
" 100 " 170 | 750 |
2.4.9. Электроприводы с обратной связью по скорости (с датчиком скорости) и с длительным моментом до 70 Н·м должны иметь полосу пропускания частот замкнутого контура регулирования скорости не менее:
30 Гц - для тиристорных электроприводов;
10 Гц - для однофазных тиристорных электроприводов;
100 Гц - для транзисторных электроприводов.
Полосу пропускания измеряют на холостом ходу электропривода при амплитуде задающего сигнала не более 0,1 В, работе регулятора в линейной зоне, без дополнительного момента инерции.
Для электроприводов с длительным моментом более 70 Н·м полоса пропускания частот не регламентируется.
2.4.10. Электроприводы в зависимости от исполнения должны иметь диапазон регулирования скорости (![]() ): до 1000 включ., от 1000 до 10000 включ. и св. 10000.
): до 1000 включ., от 1000 до 10000 включ. и св. 10000.
2.4.11. Электрически управляемый тормоз, встраиваемый в двигатель, должен растормаживаться при подаче на него напряжения и иметь длительный момент тормоза ![]() для электроприводов роботов и
для электроприводов роботов и ![]() - для электроприводов подачи. Время растормаживания - не более 0,1 с.
- для электроприводов подачи. Время растормаживания - не более 0,1 с.
2.4.12. По согласованию с потребителем допускается изготовлять электроприводы с другими параметрами, отличающимися от указанных в пп.2.4.3-2.4.5, 2.4.7-2.4.9.
2.5. Требования к основным техническим параметрам электроприводов подачи станков и промышленных роботов с обратной связью по положению
2.5.1. Электропривод с обратной связью по скорости, входящий в состав электропривода с обратной связью по положению, должен удовлетворять требованиям п.2.4.
Если электропривод не имеет явно выраженного контура регулирования скорости, то требования п.2.4 на него не распространяются.
2.5.2. Датчики положения должны быть бесконтактными.
2.5.3. Электропривод должен обеспечивать заданную величину перемещения при заданной скорости в соответствии с командой, поступающей в виде параллельного или последовательного кодов, или в виде последовательности импульсов.
2.5.4. Дискретность измерения и (или) задания перемещения должна быть ·10
оборота вала электродвигателя, где
от 1 до 100 или 2
оборота вала электродвигателя, где
от 7 до 14.
2.5.5. Значение статистической погрешности при изменении момента на валу электродвигателя в пределах ![]() должно быть не более ±2 дискрет при скорости, равной нулю.
должно быть не более ±2 дискрет при скорости, равной нулю.
2.5.6. Полоса пропускания частот замкнутого по положению контура регулирования должна быть не менее 5 Гц для тиристорных и не менее 10 Гц - для транзисторных электроприводов.
Полоса пропускания определяется при работе электропривода вхолостую в линейной зоне регуляторов и без дополнительного момента инерции.
2.5.7. Суммарное значение дрейфа электропривода - не более ±2 дискрет.
2.5.8. Электроприводы должны обеспечивать работу в одном или нескольких режимах: позиционирования; задания скорости; задания ускорения.
2.5.9. В режиме позиционирования электропривод должен обеспечивать отработку заданного перемещения без перерегулирования.
2.6. Требования к основным техническим параметрам электроприводов главного движения
2.6.1. Величина скорости должна быть пропорциональна величине входного аналогового сигнала или его цифрового эквивалента. Направление вращения должно определяться полярностью входного сигнала или при помощи дополнительного сигнала.
Напряжению 10 В соответствует максимальное значение скорости. Допускаются исполнения с напряжением, меньшим 10 В.
2.6.2. Электроприводы в зависимости от исполнения должны обеспечивать следующие суммарные диапазоны регулирования скорости двигателя: до 100 включ., от 100 до 1000 включ. и св. 1000.
Значение диапазона регулирования скорости во второй зоне (![]() ) устанавливают от 1,5 до 10. При этом, в зависимости от исполнения электродвигателя на скорости (0,7-1,0)
) устанавливают от 1,5 до 10. При этом, в зависимости от исполнения электродвигателя на скорости (0,7-1,0), допускается снижение мощности не более чем на 30% по отношению к максимальной.
2.6.3. Абсолютные значения допустимых погрешностей скорости и коэффициента неравномерности вращения приведены в табл.5.
Таблица 5
Скорость | Погрешность скорости, %, не более | Коэффициент неравномерности вращения | ||
суммарная | при изменении нагрузки | при изменении направления вращения | ||
2 | 0,5 | 1 | 0,1 | |
0,1 | 10 | 2,0 | 2 | 0,1 |
0,01 | 15 | 5,0 | 5 | 0,2 |
0,001 | 25 | 10,0 | 10 | 0,25 |
Примечания:
1. Значения погрешности скорости в пределах поддиапазона изменяются линейно.
2. Значения погрешности скорости и коэффициента неравномерности вычисляют в соответствии с приложением 1.
2.6.4. Время возврата скорости электропривода к тройному значению допуска, указанного в п.2.6.3, на скорости не менее номинальной, при ступенчатом изменении нагрузки от значения холостого хода до номинальной скорости и дополнительном моменте инерции, равном собственному моменту инерции двигателя, должно быть не более 1 с.
2.6.5. Полоса пропускания частот электропривода с обратной связью по скорости (с датчиком скорости) при отсутствии дополнительного момента инерции и амплитуде управляющего сигнала не более 0,1 В для электроприводов мощностью до 30 кВт должна быть не менее 20 Гц. Для электроприводов мощностью более 30 кВт, а также для электроприводов с другими видами обратных связей полосу пропускания не регламентируют.
2.6.6. Электроприводы должны обеспечивать следующие режимы работ по ГОСТ 183:
длительный (S1);
кратковременный (S2);
повторно-кратковременный (S3).
При этом моменты выбирают в зависимости от скорости в соответствии с характеристиками двигателей.
В технической документации на электроприводы следует указывать пределы допустимой нагрузки при работе в течение 30 мин в режиме S2.
2.6.7. Электропривод с двигателем переменного тока должен допускать в течение не более 10 с перегрузку по моменту в 1,2-2 раза по сравнению с допустимым длительным значением в соответствии с характеристиками двигателей во всем диапазоне рабочих скоростей.
Электропривод с двигателем постоянного тока должен допускать в течение не более 10 с перегрузку по току в 2 раза по сравнению с его допустимым длительным значением со снижением указанного значения при регулировании во второй зоне (ослабление поля) в соответствии с характеристиками двигателя.
2.6.8. В электроприводе должны быть реализованы следующие дополнительные функции:
формирование интенсивности нарастания и снижения заданного значения скорости,
режим ориентации ротора (якоря) (при необходимости).
2.6.9. Требования к электродвигателям двухзонных электроприводов
2.6.9.1. Электродвигатели постоянного тока должны иметь следующую максимальную скорость в зависимости от номинальной мощности:
до 11 кВт | 5000-7000 мин | |||
" 45 кВт | 4500 мин | |||
" 55 кВт | 3800 мин | |||
" 110 кВт | 3300-3600 мин | |||
св. 110 кВт | 2500-2900 мин | |||
2.6.9.2. Асинхронные электродвигатели для транзисторных электроприводов должны иметь следующую максимальную скорость в зависимости от номинальной мощности:
до 11 кВт | 6000-8000 мин | |||
" 30 кВт | 5000-7500 мин | |||
св. 30 кВт | 4000-6000 мин | |||
Примечание. В п.2.6.9 номинальная мощность электродвигателя указана при расчетной скорости 1500 мин.
2.6.10. По согласованию с потребителем допускается изготовлять электроприводы с другими параметрами, отличающимися от указанных в пп.2.6.3, 2.6.7, 2.6.9.
2.7. Требования к системам защиты и диагностики
2.7.1. Электроприводы должны быть термически и динамически устойчивы при всех аварийных режимах в течение времени срабатывания установленных в них защитных аппаратов.
2.7.2. Электроприводы должны иметь следующие виды защиты:
от коротких замыканий;
от перегрева преобразователя (при необходимости);
от перегрева двигателя;
от перенапряжений;
от исчезновения вентиляции (в системах с принудительным охлаждением);
от исчезновения напряжения сети;
от недопустимого понижения напряжения сети;
от недопустимого повышения напряжения сети (при необходимости);
от неисправностей в цепи обратной связи по скорости;
от превышения максимально допустимой скорости электропривода;
от исчезновения тока возбуждения (при необходимости);
от неправильного чередования фаз (при необходимости).
2.7.3. Электроприводы с обратной связью по положению (автономные) дополнительно должны иметь следующие защиты:
от превышения путевой ошибки допустимого значения;
от потери информации датчика положения.
2.7.4. Электроприводы должны иметь систему диагностики, позволяющую определить место возникновения неисправности в электроприводе на уровне его функциональных частей в случае срабатывания устройств защиты.
2.7.5. В электроприводах должны быть предусмотрены следующие основные обменные сигналы с системой управления верхнего уровня (системой ЧПУ) в соответствии с приложением 2:
готовность к работе;
разрешение работы или разблокировка;
экстренная (аварийная) блокировка преобразователя;
сброс защит;
фактическое значение нагрузки (тока, момента или мощности) (при необходимости)*;
внешнее токоограничение (при необходимости);
вызов минимальной технологической (ползучей) скорости (при необходимости);
скорость меньше минимальной технологической (ползучей) скорости (при необходимости);
разрешение включения подачи (скорость равна заданной)*.
________________
* Относится только к электроприводам главного движения
Примечание. Допускается по одному входу или выходу реализовать несколько функций, а функцию сброса защит допускается осуществлять путем отключения питающей сети.
2.7.6. Электроприводы с обратной связью по положению (автономные) должны обеспечивать передачу по двухпроводному каналу на ЭВМ верхнего уровня следующие сигналы:
о готовности к работе, формируемый на основе сигналов защит;
о недопустимой величине погрешности по положению;
об отработке заданного перемещения.
2.8. Требования к надежности
2.8.1. Средняя наработка на отказ должна быть:
для электроприводов постоянного тока и асинхронных - не менее 5000 ч;
для синхронных вентильных электроприводов - не менее 6000 ч.
2.8.2. Среднее время восстановления должно быть не более 1 ч (без учета времени восстановления двигателя).
2.8.3. Средний срок службы должен быть не менее 15 лет.
2.8.4. Гамма-процентный ресурс сохраняемости на период хранения в упаковке предприятия-изготовителя должен быть не менее года при доверительной вероятности 0,95.
Примечание. Требования п.2.8 установлены для однокоординатного (однодвигательного) электропривода или для одной координаты многокоординатного (многодвигательного) электропривода.
2.9. Требования по устойчивости к внешним воздействиям во время эксплуатации, транспортирования и хранения
2.9.1. Номинальные значения климатических факторов - по ГОСТ 15150 и ГОСТ 15543.1. Но при этом нижнее значение рабочей температуры плюс 5 °С.
Температура окружающего воздуха для преобразователей от 5 до 45 °С и от 45 до 55 °С со снижением номинального тока (момента) на 10% при повышении температуры на каждые 5 °С.
Технические характеристики и правила эксплуатации электроприводов на высоте св. 1000 до 4300 м должны быть указаны в технических условиях на электроприводы конкретных типов.
2.9.2. Электроприводы вида климатического исполнения О4 должны соответствовать требованиям ГОСТ 15963.
2.9.3. Требования по воздействию механических факторов внешней среды - по ГОСТ 17516.1. Группы условий эксплуатации по воздействию механических факторов внешней среды должны быть указаны в технических условиях на электроприводы конкретных типов.
2.9.4. Для составных частей электроприводов должны применяться следующие группы условий эксплуатации по ГОСТ 17516.1:
M1 - для устанавливаемых в отдельно стоящие шкафы;
М8 - для устанавливаемых на станке.
Электродвигатели электроприводов, предназначенных для кузнечно-прессового оборудования, должны допускать вибрацию с частотой до 100 Гц при ускорении 19,62 м·с.
Примечание. Показатели виброустойчивости и вибропрочности электроприводов, выполненных в шкафном исполнении (в защитной оболочке), - по техническим условиям на электроприводы конкретных типов.
2.9.5. Транспортирование электроприводов должно производиться любым видом крытого транспорта в условиях, исключающих возможность непосредственного воздействия атмосферных осадков и агрессивных сред.
Транспортирование электроприводов - по ГОСТ 23216 (для условий Л).
2.9.6. Хранение электроприводов на предприятии-изготовителе и у потребителя должно производиться в вентилируемых помещениях с температурой не ниже плюс 5 °С при относительной влажности воздуха не более 80% и отсутствии воздействия кислотных и других паров в концентрациях, вредно действующих на электроприводы и их упаковку.
2.10. Требования безопасности
2.10.1. Требования безопасности электроприводов - по ГОСТ 12.2.009* и ГОСТ 12.2.007.7.
______________
* На территории Российской Федерации действует ГОСТ 12.2.009-99. - .
2.10.2. По способу защиты человека от поражения электрическим током электроприводы относятся к 01 классу по ГОСТ 12.2.007.0.
2.10.3. По пожарной безопасности электроприводы должны соответствовать ГОСТ 12.1.004*.
______________
* На территории Российской Федерации действует ГОСТ 12.1.004-91. - .
2.11. Требования к конструкции
2.11.1. Преобразователи и их принадлежности в кассетном и блочном (модульном) исполнениях должны выполняться со степенью защиты IP00 по ГОСТ 14254*.
______________
* На территории Российской Федерации действует ГОСТ 14254-96. - .
Степень защиты преобразователей шкафного исполнения определяют в зависимости от условий эксплуатации.
2.11.2. Силовой преобразователь, трансформатор, дроссели со стальными сердечниками должны иметь заземляющие зажимы по ГОСТ 21130.
2.11.3. Форма исполнения электродвигателей по ГОСТ 2479 и степень защиты по ГОСТ 17494 должны указываться в технических условиях на электроприводы конкретных типов.
2.11.4. Уровень вибрации электродвигателей должен соответствовать категории R согласно ГОСТ 16921 и ГОСТ 12379.
По согласованию с потребителем допустимо применение электродвигателей с другими категориями вибрации.
2.11.5. Уровень шума электродвигателей должен соответствовать классам 2 и 3 по ГОСТ 16372*.
______________
* На территории Российской Федерации действует ГОСТ 16372-93. - .
2.11.6. Конструктивные параметры составных частей электроприводов рекомендуется выбирать в соответствии с приложением 2 и техническими условиями на них.
Допуски на установочно-присоединительные размеры электродвигателей - по ГОСТ 8592.
2.12. Требования к защите от радиопомех
Защита от радиопомех должна осуществляться средствами потребителя.
Параметры защитных цепей и рекомендации по месту их установки должны указываться в техническом описании и инструкции по эксплуатации на электроприводы конкретных типов.
ПРИЛОЖЕНИЕ 1
Обязательное
ПОЯСНЕНИЕ ПОНЯТИЙ, ПРИМЕНЯЕМЫХ В СТАНДАРТЕ
Понятие | Пояснение |
1. Длительный момент электропривода: | Крутящий момент на валу электродвигателя, длительно допустимый при скоростях от |
| |
2. Максимальный момент | Электромагнитный момент электродвигателя, который может быть обеспечен кратковременно при переходных процессах |
3. Скорость: | |
максимальная | Наибольшая рабочая скорость электропривода |
минимальная | Наименьшая рабочая скорость, при которой сохраняются параметры электропривода в соответствии с табл.3 и 5 |
номинальная | Скорость электропривода при питании номинальными напряжением и током при номинальном моменте нагрузки |
________________ * Для электроприводов главного движения. | |
4. Суммарная погрешность скорости | Сумма максимальных абсолютных значений погрешностей при изменении нагрузки
|
5. Погрешность скорости при изменении нагрузки | Определяется при номинальном напряжении питающей сети и температуре окружающего воздуха (20±5) °С по формулам: для электроприводов подачи и роботов
для электроприводов главного движения
где - значения скорости соответственно при моментах нагрузки 0,15 За Примечание. В электроприводах постоянного тока и переменного тока с синхронными двигателями допускается определять |
6. Погрешность скорости при изменении напряжения питающей сети | Определяется при холостом ходе и температуре окружающей среды (20±5) °С по формулам:
где За |
7. Погрешность скорости при изменении температуры окружающей среды | Определяется при изменении температуры от (20±5) °С до (40±5) °С и предварительном прогреве электропривода до установившегося состояния при номинальном значении напряжения питающей сети (для электроприводов главного движения - при номинальном токе) и нагрузке, равной 0,5
|
8. Погрешность скорости при изменении направления вращения | Определяется при холостом ходе электропривода, номинальном напряжении питающей сети и постоянной температуре окружающей среды (20±5) °С по формуле
где |
9. Коэффициент неравномерности вращения | Определяется при холостом ходе электропривода, номинальном напряжении питающей сети и постоянной температуре окружающей среды (20±5) °С по формуле
где |
10. Полоса пропускания частот замкнутого контура регулирования скорости (положения) | Наименьшая из частот, при которой сдвиг по фазе первых гармоник сигналов обратной связи по скорости (положению) и управляющего сигнала не превышает 90 электрических градусов или при которой снижение амплитуды выходного сигнала не более 3 дБ. |
11. Время растормаживания тормоза | Определяется от момента подачи напряжения до достижения 0,1 |
12. Минимальная технологическая скорость (ползучая) | Скорость, при которой производят переключение редукции механизма или наложение тормоза |
13. Среднее значение углового ускорения электропривода | Определяется как отношение скорости 0,63
|
 %;
%; %;
%; %;
%; %,
%, %;
%; %;
%; %
% %,
%,
ПРИЛОЖЕНИЕ 2
Справочное
КОНСТРУКТИВНАЯ И СХЕМНАЯ УНИФИКАЦИЯ
1. Обозначение электропривода
Комплектные электроприводы, предназначенные для экспорта, обозначают в соответствии со структурой обозначения, представленной на черт.1.
Структура условного обозначения комплектных приводов главного движения и однокоординатных
и многокоординатных комплектных электроприводов подачи для станков с ЧПУ и роботов
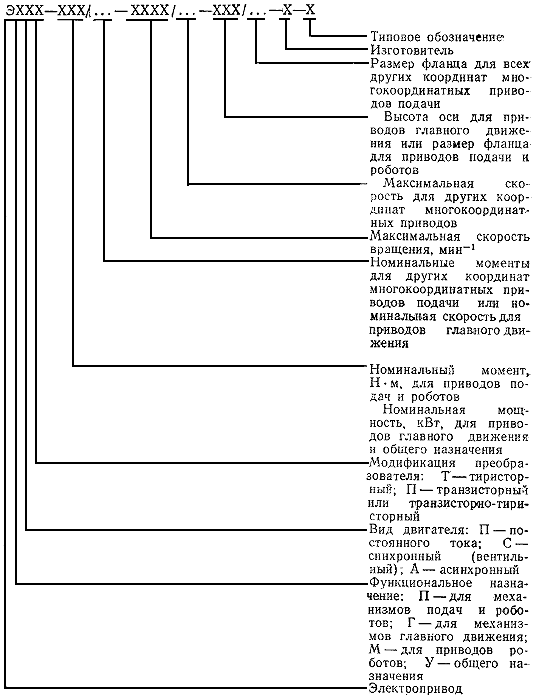
Черт.1
Данное условное обозначение указывается в информационных материалах электроприводов, предназначенных для экспорта.
Комплектные электроприводы, поставляемые внутри страны, обозначаются в соответствии с принятой структурой условного обозначения страны.
2. Схема подключения и обозначения клемм и разъемов
Унифицированная схема внешних соединений преобразователей для электроприводов главного движения и подачи станков и промышленных роботов приведена на черт.2. Схема выполнена на основе обобщенной принципиальной схемы при введении унифицированного обозначения клемм.
Унифицированная схема внешних соединений преобразователей для электроприводов
главного движения и подачи металлорежущих станков с ЧПУ и промышленных роботов
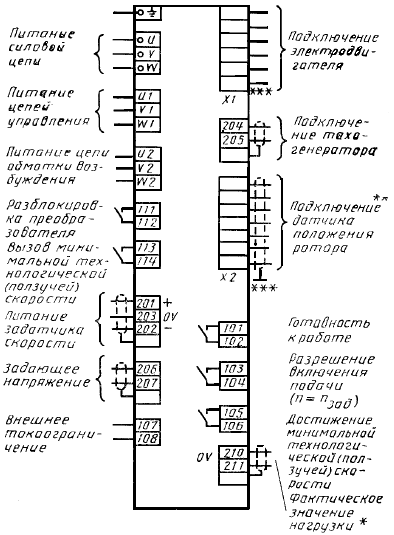
Черт.2
________________
* Относится только к электроприводам главного движения.
** Относится только к электроприводам переменного тока.
*** Обозначение клемм (X1, Х2) - согласно ГОСТ 2.709, в зависимости от вида применяемого электродвигателя.
Для соединения клемм информационной электроники действительно следующее распределение:
1ХХ - дискретные входы и выходы сигналов (реле ввода и вывода);
2ХХ - аналоговые входы и выходы сигналов.
В новых разработках электроприводов следует использовать унифицированное обозначение клемм согласно черт.2.
Если обозначение клемм уже разработанных приводов не отвечает требованиям, указанным на черт.2, или используются разъемы, следует включить в сопроводительную документацию таблицу, в которой сопоставляются фактические и унифицированные обозначения, как, например, указано в табл.6.
Таблица 6
Унифицированное обозначение | Фактическое обозначение | Примечание |
U | А | Подключение питающей сети |
V | В | |
W | С | |
201 | 11 | Питание задатчика скорости |
202 | 12 |
3. Последовательность коммутационных операций
Релейная система управления контакторами или силовыми выключателями обеспечивает во взаимодействии с информационной электроникой электропривода последовательность коммутационных операций согласно пп.3.1 и 3.2.
3.1. Последовательность коммутационных операций для приводов подачи
3.1.1. Последовательность коммутационных операций при включении:
включение питания информационной электроники;
включение питания силовой цепи (возможно одновременное включение питания силовой цепи с информационной электроникой);
замыкание внутреннего контакта "готовность к работе";
замыкание внешнего контакта "разблокировка преобразователя" (привод готов к регулированию скорости).
3.1.2. Последовательность коммутационных операций при отключении:
снятие задающего напряжения, размыкание внешнего контакта "разблокировка преобразователя" (при необходимости с задержкой времени) и оптимальное торможение в регулируемом режиме (при необходимости внутреннее закорачивание входа задания);
внутренняя блокировка регулятора, блокировка импульсов, отключение силовой части преобразователя (для однокоординатных электроприводов) осуществляется после выдержки времени или при скорости, близкой к нулю;
включение тормоза (при необходимости).
3.1.3. Последовательность коммутационных операций при авариях в приводе:
внутренняя схема защиты выявляет неисправность и осуществляет блокировку регулятора и (или) запирание импульсов;
размыкание контакта реле "готовность к работе" и соответствующая сигнализация неисправности (сигнал в памяти);
отключение напряжения силовой части преобразователя;
через вспомогательный контакт коммутационного аппарата силовой цепи (или другим способом) начинает действовать схема торможения (торможение, встроенное в преобразователе или внешняя схема) или включается механический тормоз двигателя;
новый запуск возможен только после замыкания контакта реле "готовность к работе". Стирание записанного в памяти сигнала неисправности осуществляется специальным контактом стирания (сброса) сигнала неисправности в преобразователе или снятием и повторным включением напряжения питания информационной электроники.
Примечание. При исчезновении напряжения сети вследствие нажатия кнопки аварийного останова или по другим причинам осуществляется остановка двигателя посредством электрической схемы динамического торможения или механического тормоза двигателя.
3.2. Последовательность коммутационных операций для приводов главного движения
3.2.1. Последовательность коммутационных операций при включении:
включение питания информационной электроники, включение питания цепи возбуждения и вентилятора двигателя (при наличии);
включение питания силовой цепи (возможно одновременное включение питания силовой цепи с информационной электроникой);
замыкание внутреннего контакта "готовность к работе";
замыкание внешнего контакта "разблокировка преобразователя" (привод готов к регулированию скорости).
3.2.2. Последовательность коммутационных операций при отключении:
снятие задающего напряжения, размыкание внешнего контакта "разблокировка преобразователя" (при необходимости после достижения скорости, близкой к нулю) и торможение в регулируемом режиме до скорости, близкой к нулю (при необходимости внутреннее закорачивание входа задания);
внутренняя блокировка регулятора, блокировка импульсов, отключение питания цепи якоря; отключение питания цепи возбуждения и вентилятора (при наличии).
Примечание. В технически обоснованных случаях возможно снижение тока возбуждения после отключения питания цепи якоря.
3.2.3. Последовательность коммутационных операций при авариях в приводе:
внутренняя схема защиты выявляет неисправность и осуществляет блокировку регулятора и (или) запирание импульсов;
размыкание контакта реле "готовность к работе" и соответствующая сигнализация неисправности (сигнал в памяти);
отключение напряжения силовой части преобразователя;
новый запуск возможен только после замыкания контакта в памяти сигнала неисправности: при включении силовой цепи электропривода или специальным контактом (сброс) в преобразователе или снятием и повторным включением напряжения питания информационной электроники.
Примечание. В технически обоснованных случаях допускается динамическое торможение.
4. Конструктивное исполнение преобразователей
Предельные габаритные размеры преобразователей со степенью защиты IP00 выбирают из следующих предпочтительных величин:
ширина= или
, или
, или
, или
, или
, или
, где
483 мм (19 дюймов);
высота=, где
254 мм (10 дюймов),
- целое число;
глубина - не более 500 мм.
Для кассетного исполнения приведенные размеры являются габаритными размерами кассеты.
Тиристорные и транзисторные преобразователи имеют одоностороннее обслуживание.
5. Показатели экономного использования энергии
5.1. Экономное использование энергии характеризуется следующими показателями: удельной потребляемой мощностью, коэффициентом полезного действия или потерями электроэнергии в преобразователе.
Показатели экономного использования энергии устанавливаются в технических условиях на электроприводы конкретных типов.
5.2. Для электроприводов подач и роботов показатели п.5.1 задаются для одной координаты электропривода при максимальной скорости и длительном моменте, соответствующем этой скорости.
5.3. Для электроприводов главного движения показатели п.5.1 задаются при номинальной мощности и номинальной скорости.
Электронный текст документа
и сверен по:
М.: Издательство стандартов, 1991
{kind=link}