ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ГОСТ Р 60.0.0.9— 2023

НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ОНТОЛОГИИ РОБОТОТЕХНИКИ
Понятия и отношения, описывающие составные части робота
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 РАЗРАБОТАН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. № 851-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Нормативные ссылки
3 Термины и определения
4 Общие положения
5 Онтологии робототехники, описывающие составные части робота
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации — промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Общие положения, основные понятия, термины и определения» и распространяется на все виды роботов и робототехнических устройств.
ГОСТ Р 60.0.0.9—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
ОНТОЛОГИИ РОБОТОТЕХНИКИ
Понятия и отношения, описывающие составные части робота
Robots and robotic devices. Ontologies for robotics. Concepts and relations describing robot components
Дата введения — 2024—01—01
1 Область применения
Настоящий стандарт устанавливает онтологии, описывающие составные части робота. Стандарт обеспечивает унифицированный способ представления знаний, понятий и отношений, касающихся составных частей робота.
Целевой аудиторией для настоящего стандарта являются производители роботов, системные интеграторы, конечные пользователи роботов (производители деталей, поставщики услуг и решений и т. д.), поставщики оборудования для роботов, разработчики программного обеспечения роботов и исследователи.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 60.0.0.4 Роботы и робототехнические устройства. Термины и определения
ГОСТ Р 60.0.0.8—2023 Роботы и робототехнические устройства. Онтологии робототехники. Общие положения, основные понятия, термины и определения
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 60.0.0.4, а также следующие термины с соответствующими определениями:
3.1
агент (agent): Что-то или кто-то, способный действовать самостоятельно и производить изменения в мире.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.2]
Издание официальное
3.2
артефакт (artifact): Искусственно созданный трехмерный объект.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.3]
3.3
измерительное устройство (measuring device): Любое устройство, предназначенное для измерения физической величины.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.9]
3.4
интерфейс робота (robot interface): Устройство [Устройство (Device) в SUMO], состоящее из сенсорных, исполнительных и коммуникационных компонентов робота.
Примечание — Через интерфейс робот может воспринимать окружающую среду и воздействовать на нее, а также коммуницировать с другими агентами. Таким образом, интерфейс робота можно рассматривать как способ обозначения всех устройств, которые позволяют роботу взаимодействовать с окружающим миром. Каждый робот имеет только один интерфейс.
[ГОСТ Р 60.0.0.8—2023, статья 3.8]
3.5
коммуникационный компонент робота (robot communicating part): Устройство [Устройство (Device) в SUMO], служащее инструментом в процессе коммуникации робота с роботом или человека с роботом, позволяя роботу посылать информацию другому роботу или человеку (или принимать информацию от них).
[ГОСТ Р 60.0.0.8—2023, статья 3.12]
3.6 компонент системы (system component): Представитель совокупности компонентов, образующих систему.
Пример — Примерами компонентов системы являются коммуникационный компонент робота, обрабатывающий компонент робота, исполнительный компонент робота, сенсорный компонент робота.
3.7
компьютерный процесс (computer process): Процесс обработки информации в компьютере. [ГОСТ Р 60.0.0.8—2023, статья 5.6.14]
3.8
модуль (module): Компонент или сборка компонентов с заданными интерфейсами, сопровождаемый профилями характеристик и предназначенный для облегчения проектирования системы, интеграции, интероперабельности и повторного использования.
[ГОСТ Р 60.2.0.1—2022, пункт 3.3.12, модифицировано — Примечания удалены]
3.9
обрабатывающий компонент робота (robot processing part): Устройство, позволяющее роботу обрабатывать информацию.
[ГОСТ Р 60.0.0.8—2023, статья 3.17]
3.10
обрабатывающее устройство (processing device): Электрическое устройство [Электрическое устройство (Electric Device) в SUMO], являющееся инструментом в подклассе компьютерного процесса [Компьютерный процесс (Computer Process) в SUMO].
[ГОСТ Р 60.0.0.8—2023, статья 3.18]
3.11 объект (object): Класс вещей, существующих в трехмерном пространстве и способных изменяться в результате процессов.
Примечание — Объект имеет пространственные части, существующие во времени одновременно.
3.12
онтология (ontology): Совокупность терминов, выражений отношения и связанных с ними определений на естественном языке вместе с одной или несколькими формальными теориями, предназначенными для отражения заданных интерпретаций этих определений.
[ГОСТ Р ИСО/МЭК21838-1—2021, статья 3.14]
3.13
процесс (process): Класс явлений, которые происходят и имеют временные (темпоральные) части или стадии.
Примечание — Примеры включают длительные события, такие как футбольный матч или гонка, такие действия, как преследование и ожидание. Формальное определение таково: все, что происходит во времени, но не является объектом.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.24]
3.14
сенсорный компонент робота (robot sensing part): Измерительное устройство [Измерительное устройство (Measuring Device) в SUMO], позволяющее роботу получать информацию об окружающей среде.
[ГОСТ Р 60.0.0.8—2023, статья 3.27]
3.15 система (system): Совокупность взаимодействующих компонентов, организованных для достижения одной или нескольких поставленных целей.
Примечание — В контексте настоящего стандарта робот является системой.
3.16 система управления: Совокупность управляющей логики и силовых функций, позволяющих контролировать и управлять компонентами робота, а также осуществлять взаимосвязь с внешней средой (оборудованием и пользователями).
3.17
сущность (entity): Универсальный класс индивидуумов, корневой узел онтологии.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.26]
3.18
таксономия (taxonomy): Иерархическая структура терминов, которую можно использовать для локализации, описания, идентификации, восстановления и/или управления информацией и знаниями.
Примечания
1 Таксономия может содержать обзор или краткое изложение знаний организации или же перечень основных заинтересованностей организации.
2 Результат идентификации и структурирования знаний. Иерархическая классификация, которая помогает пользователям разобраться в процедуре группировки и категоризации формализованных (явных) знаний. Таксономия облегчает поиск и приобретение новых знаний.
[ГОСТ Р 53894—2016, статья 2.80]
3.19
устройство (device): Артефакт, предназначение которого состоит в том, чтобы служить инструментом в определенном подклассе процесса.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.29]
3.20
электрическое устройство (electric device): Устройство, приводимое в действие с помощью электричества.
[ГОСТ Р 60.0.0.8—2023, статья 5.6.35]
4 Общие положения
4.1 Понятия онтологий, определенные в данном стандарте, выделены курсивом. Слитное написание понятий в одно слово применяется при описании классов онтологий и отношений между ними на языке OWL.
4.2 Онтологией верхнего уровня для онтологий робототехники должна быть онтология SUMO, определенная в разделе 5 ГОСТ Р 60.0.0.8—2023. Базовая таксономия SUMO приведена на рисунке 1.
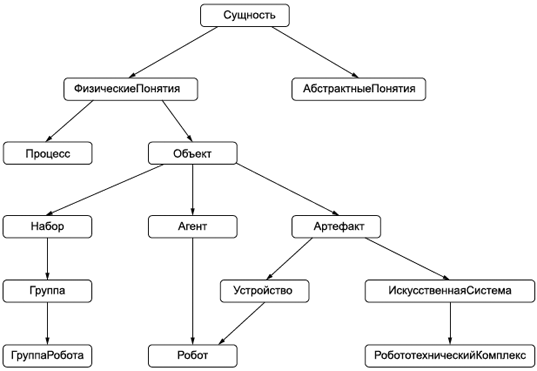
Рисунок 1 — Базовая таксономия SUMO
4.3 На языке OWL взаимосвязь понятий, относящихся к базовой таксономии SUMO, следует описывать таким образом:
Declaration(Class(:АбстрактныеПонятия))
Declaration(Class(:Агент))
Declaration(Class(:Артефакт))
Declaration(Class(:Атрибут))
Declaration(Class(:Группа))
Declaration(Class(:Количество))
Declaration(Class(:Набор))
Declaration(Class(:Объект))
Declaration(Class(:Отношения))
Declaration(Class(:Процесс))
Declaration(Class(:Сущность))
Declaration(Class(Устройство))
Declaration(Class(:Утверждение))
Declaration(Class(:ФизическиеПонятия)) ############################ # Classes ############################ # Class: :АбстрактныеПонятия (:АбстрактныеПонятия) SubClassOf(:АбстрактныеПонятия :Сущность)
DisjointClasses(:АбстрактныеПонятия :ФизическиеПонятия) # Class: :Агент (:Агент) SubClassOf(:Агент :0бъект)
# Class: :Артефакт (:Артефакт) SubClassOf(:Артефакт :0бъект) # Class: :Атрибут (:Атрибут) SubClassOf(:Атрибут :АбстрактныеПонятия) # Class: :Группа (:Группа) SubClassOf(:Группа :Агент) SubClassOf(:Группа :Набор)
# Class: количество (:Количество)
SubClassOf(:Количество :АбстрактныеПонятия) # Class: :Набор (:Набор) SubClassOf(:Набор :Объект) # Class: :Объект (:Объект) SubClassOf(:Объект :ФизическиеПонятия) # Class: :Отношения (:Отношения) SubClassOf(:Отношения :АбстрактныеПонятия) # Class: :Процесс (:Процесс) SubClassOf(:Процесс :ФизическиеПонятия) # Class: Устройство (:Устройство) SubClassOf(Устройство :Артефакт) # Class: Утверждение (Утверждение) SubClassOf (Утверждение : АбстрактныеПонятия) # Class: :ФизическиеПонятия (:ФизическиеПонятия) SubClassOf(:ФизическиеПонятия :Сущность)
4.4 В качестве доменной онтологии, описывающей концепции предметной области «Робототехника и автоматизация», следует использовать онтологию CORA (см. ГОСТ Р 60.0.0.8—2023, раздел 7), согласованную с онтологией SUMO. Основным понятием в CORA является Робот. В CORA Робот — это устройство-агент, предназначенное действовать в физическом мире для выполнения одной или нескольких задач. Таксономия понятий, связанных с понятием Робот, приведена на рисунке 2.
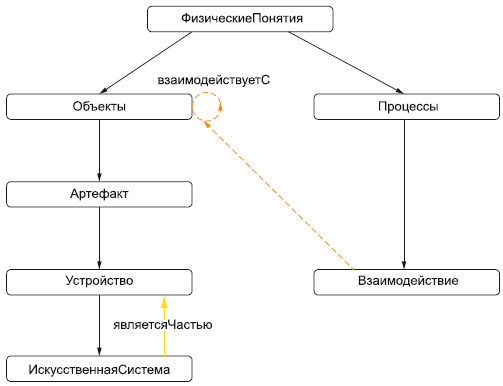
Рисунок 2 — Таксономия понятий онтологии CORA, связанных с понятием Робот
4.5 На языке OWL взаимосвязь понятий, относящихся к таксономии онтологии CORA, следует описывать таким образом:
Declaration(Class(:АбстрактныеПонятия)) Declaration(Class(:Агент)) Declaration(Class(:Артефакт)) Declaration(Class(:Группа)) Declaration(Class(:ГруппаРоботов)) Declaration(Class(:ИскусственнаяСистема)) Declaration(Class(:Набор)) Declaration(Class(:Объекты)) Declaration(Class(:Процессы)) Declaration(Class(:Робот)) Declaration(Class(:РобототехническийКомплекс)) Declaration(Class(:Сущность)) Declaration(Class(Устройство) ) Declaration(Class(:ФизическиеПонятия)) ############################ # Classes ############################ # Class: :АбстрактныеПонятия (:АбстрактныеПонятия) SubClassOf(:АбстрактныеПонятия :Сущность) # Class: :Агент (:Агент) SubClassOf(:Агент :Объекты) # Class: :Артефакт (:Артефакт) SubClassOf(:Артефакт :0бъекты) # Class: :Группа (:Группа) SubClassOf(:Группа :Набор) # Class: :ГруппаРоботов (:ГруппаРоботов) SubClassOf(:ГруппаРоботов :Группа) # Class: :ИскусственнаяСистема (:ИскусственнаяСистема) SubClassOf(:ИскусственнаяСистема :Артефакт) # Class: :Набор (:Набор) SubClassOf(:Набор :Объекты) # Class: :Объекты (:Объекты) SubClassOf(:Объекты :ФизическиеПонятия) # Class: :Процессы (:Процессы) SubClassOf(:Процессы :ФизическиеПонятия) # Class: :Робот (:Робот) SubClassOf(:Робот :Агент) SubClassOf(:Робот :Устройство) # Class: :РобототехническийКомплекс (:РобототехническийКомплекс) SubClassOf(:РобототехническийКомплекс :ИскусственнаяСистема) # Class: :Устройство (:Устройство) SubClassOf(Устройство :Артефакт) # Class: :ФизическиеПонятия (:ФизическиеПонятия) SubClassOf(:ФизическиеПонятия :Сущность)
4.6 В качестве дополнения онтологии CORA, представляющей понятия и отношения субдоменов предметной области «Робототехника и автоматизация», следует использовать онтологию CORAX (см. ГОСТ Р 60.0.0.8—2023, раздел 6). В настоящем стандарте использованы понятия ИскусственнаяСистема и Взаимодействие, таксономия которых по CORAX приведена на рисунке 3.
Понятие ИскусственнаяСистема следует описывать как артефакт, образованный различными устройствами (и другими объектами), которые взаимодействуют друг с другом для выполнения функции.
Понятие Взаимодействие следует описывать как процесс, состоящий из двух субпроцессов, которые определяют действие и реакцию. 6
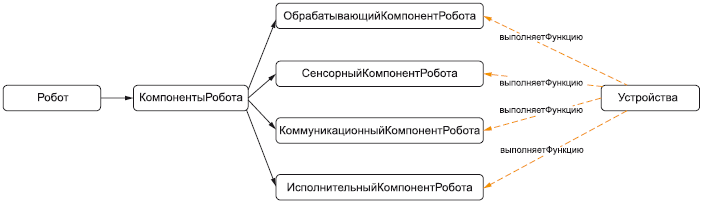
Рисунок 3 — Таксономия понятий ИскусственнаяСистема и Взаимодействие по CORAX
4.7 На языке OWL взаимосвязь понятий, связанных с понятиями ИскусственнаяСистема и Взаимодействие, следует описывать таким образом: Declaration(Class(:Артефакт)) Declaration(Class(:Взаимодействие) ) Declaration(Class(:ИскусственнаяСистема)) Declaration(Class(:Объекты)) Declaration(Class(:Процессы)) Declaration(Class(:Устройство) ) Declaration(Class(:ФизическиеПонятия)) Declaration (ObjectProperty(:взаимодействуете)) Declaration(Obj ectProperty(:являетсяЧастью)) ############################ # Object Properties ############################
# Object Property: взаимодействуете (:взаимодействуете)
SymmetricObjectProperty(:взаимодействуете)
Obj ectPropertyDomain(:взаимодействуете :Объекты)
Obj ectPropertyRange(:взаимодействуете :Объекты)
# Object Property: :являетсяЧастью (:являетсяЧастью)
ObjectPropertyDomain(:являетсяЧастью :ИскусственнаяСистема)
Obj ectPropertyRange(:являетсяЧастью :Устройство) ############################ # Classes
############################
# Class: :Артефакт (:Артефакт) SubClassOf(:Артефакт :Объекты) # Class: :Взаимодействие (:Взаимодействие) Equivalentclasses(:Взаимодействие ObjectSomeValuesFrom(:взаимодействуете :Объекты)) SubClassOf(:Взаимодействие :Процессы)
# Class: :ИскусственнаяСистема (:ИскусственнаяСистема) SubClassOf(:ИскусственнаяСистема Устройство)
# Class: :Объекты (:Объекты)
SubClassOf(:Объекты :ФизическиеПонятия) # Class: :Процессы (:Процессы) SubClassOf(:Процессы :ФизическиеПонятия) # Class: Устройство (Устройство) SubClassOf(Устройство :Артефакт)
5 Онтологии робототехники, описывающие составные части робота
5.1 Онтологии робототехники, описывающие составные части робота, следует разрабатывать с использованием понятия «компонент робота» (robotPart), сформулированного в онтологии CORA (см. ГОСТ Р 60.0.0.8—2023, пункт 7.2). Онтологически конкретный экземпляр устройства следует рассматривать как компонент робота, в течение интервала времени, когда он установлен на роботе или подключен к роботу. Например, конкретный экземпляр источника питания онтологически должен рассматриваться как компонент робота, в течение интервала времени когда этот источник подключен к роботу.
5.2 В качестве расширения онтологии CORA следует использовать онтологию RPARTS, определенную в разделе 8 ГОСТ Р 60.0.0.8—2023. Набор понятий, содержащихся в онтологии RPARTS, допускается расширять. Во всех случаях определения RPARTS должны относиться к устройствам, установленным и подключенным на роботе.
Таксономия понятий, связанных с компонентами робота в соответствии с RPARTS, показана на рисунке 4.
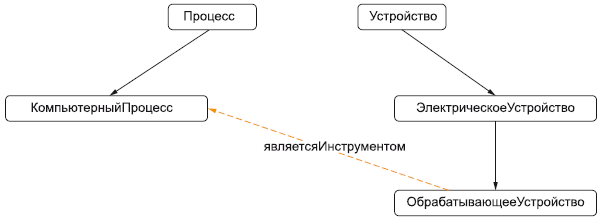
Рисунок 4 — Таксономия понятий, связанных с компонентами робота, по RPARTS
На языке OWL взаимосвязь понятий, связанных с компонентами робота, следует описывать таким образом:
Declaration(Class(:Робот))
Declaration(Class(:КомпонентРобота))
Declaration(Class(:ИсполнительныйКомпонентРобота))
Declaration(Class(:КоммуникационныйКомпонентРобота))
Declaration(Class(:ОбрабатывающийКомпонентРобота))
Declaration(Class(:СенсорныйКомпонентРобота))
Declaration(Class(Устройства))
Declaration(Obj ectProperty(:выполняетФункцию))
############################
# Object Properties
############################
# Object Property: :выполняетФункцию (:выполняетФункцию)
ObjectPropertyDomain(:выполняетФункцию :Устройства)
ObjectPropertyRange(:выполняетФункцию :ИсполнительныйКомпонентРобота)
ObjectPropertyRange(:выполняетФункцию :КоммуникационныйКомпонентРобота)
ObjectPropertyRange(:выполняетФункцию :ОбрабатывающийКомпонентРобота)
ObjectPropertyRange(:выполняетФункцию :СенсорныйКомпонентРобота) ############################
# Classes
############################
# Class: :КомпонентРобота (:КомпонентРобота)
SubClassOf(:КомпонентРобота :Робот)
# Class: ИсполнительныйКомпонентРобота (:ИсполнительныйКомпонентРобота) SubClassOf(ИсполнительныйКомпонентРобота :КомпонентРобота)
# Class: :КоммуникационныйКомпонентРобота (:КоммуникационныйКомпонентРобота) SubClassOf(:КоммуникационныйКомпонентРобота :КомпонентРобота)
# Class: :ОбрабатывающийКомпонентРобота (:ОбрабатывающийКомпонентРобота) SubClassOf(ОбрабатывающийКомпонентРобота :КомпонентРобота)
# Class: :СенсорныйКомпонентРобота (:СенсорныйКомпонентРобота) SubClassOf(:СенсорныйКомпонентРобота :КомпонентРобота)
5.3 С помощью понятия СенсорныйКомпонентРобота (robotSensingPart) в онтологическом смысле следует описывать устройства, выполняющие функцию измерения. Например, устройство «лазерный дальномер» следует описывать как сенсорный компонент робота, когда оно установлено и подключено на роботе.
5.4 С помощью понятия ИсполнительныйКомпонентРобота (robotActuatingPart) в онтологическом смысле следует описывать устройства, с помощью которых робот может двигаться и действовать в окружающей среде. Например, захватное устройство следует описывать как исполнительный компонент робота, когда оно установлено и подключено на роботе.
5.5 С помощью понятия КоммуникационныйКомпонентРобота (robotCommunicatingPart) в онтологическом смысле следует описывать устройства, служащие инструментом в процессе коммуникации робота с роботом или человека с роботом, то есть обеспечивающие отправку и получение информации. Например, устройство «радиомодем» следует описывать как коммуникационный компонент робота, когда он установлен и подключен на роботе.
5.6 С помощью понятия ОбрабатывающийКомпонентРобота (robotProcessingPart) в онтологическом смысле следует описывать устройства, с помощью которых робот может обрабатывать информацию (обрабатывающие устройства). Например, устройство «контроллер» следует описывать как обрабатывающий компонент робота, когда оно установлено и подключено на роботе.
Рисунок 5 иллюстрирует таксономию понятия ОбрабатывающееУстройство.
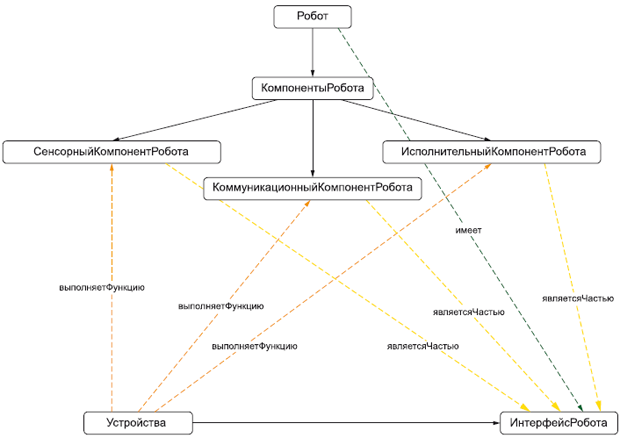
Рисунок 5 — Таксономия понятия ОбрабатывающееУстройство
На языке OWL взаимосвязь понятий, связанных с понятием ОбрабатывающееУстройство, следует описывать таким образом:
Declaration(Class(:КомпьютерныйПроцесс) )
Declaration(Class(:ОбрабатывающееУстройство))
Declaration(Class(:Процесс) )
Declaration(Class(Устройство) )
Declaration(Class(:ЭлектрическоеУстройство))
Declaration(Obj ectProperty(:являетсяИнструментом))
############################
# Object Properties
############################
# Object Property: :являетсяИнструментом (:являетсяИнструментом)
ObjectPropertyDomain(:являетсяИнструментом :ОбрабатывающееУстройство)
ObjectPropertyRange(:являетсяИнструментом :КомпьютерныйПроцесс) ############################
# Classes
############################
# Class: :КомпьютерныйПроцесс (:КомпьютерныйПроцесс) SubClassOf(:КомпьютерныйПроцесс :Процесс)
# Class: :ОбрабатывающееУстройство (:ОбрабатывающееУстройство) SubClassOf(:ОбрабатывающееУстройство :ЭлектрическоеУстройство) # Class: :ЭлектрическоеУстройство (:ЭлектрическоеУстройство) SubClassOf (:ЭлектрическоеУстройство :Устройство)
5.7 С помощью понятия НавигационныйКомпонентРобота в онтологическом смысле следует описывать устройства, предназначенные для решения одной или нескольких задач определения местоположения, скорости и ориентации движущихся объектов.
5.8 Набор сенсорных, исполнительных и коммуникационных компонентов, через которые робот может воспринимать окружающую среду, воздействовать на окружающую среду и осуществлять коммуникацию с другими агентами, онтологически следует описывать как особое устройство — Интерфейс-Робота (Robotinterface) (см. ГОСТ Р 60.0.0.8—2023, пункт 7.3).
Рисунок 6 иллюстрирует таксономию понятия ИнтерфейсРобота.

Рисунок 6 — Таксономия понятия ИнтерфейсРобота
На языке OWL взаимосвязь понятий, связанных с понятием ИнтерфейсРобота, следует описывать таким образом:
Declaration(Class(:ИнтерфейсРобота))
Declaration(Class(:ИсполнительныйКомпонентРобота))
Declaration(Class(:КоммуникационныйКомпонентРобота))
Declaration(Class(:КомпонентыРобота) )
Declaration(Class(:Робот) )
Declaration (Class(:СенсорныйКомпонентРобота))
Declaration(Class(Устройства) )
Declaration(Obj ectProperty(:выполняетФункцию))
Declaration(ObjectProperty(:имеет))
Declaration (ObjectProperty(:являетсяКомпонентом))
############################
# Object Properties
############################
# Object Property: :выполняетФункцию (:выполняетФункцию)
AsymmetricObj ectProperty(:выполняетФункцию)
ObjectPropertyDomain(:выполняетФункцию :Устройства)
ObjectPropertyRange(:выполняетФункцию :ИсполнительныйКомпонентРобота)
ObjectPropertyRange(:выполняетФункцию :КоммуникационныйКомпонентРобота)
ObjectPropertyRange(:выполняетФункцию :СенсорныйКомпонентРобота)
# Object Property: :имеет (:имеет)
Functiona10bj ectProperty(:имеет)
ObjectPropertyDomain(:имеет :Робот)
ObjectPropertyRange(:имеет :ИнтерфейсРобота)
# Object Property: :являетсяКомпонентом (:являетсяКомпонентом)
AsymmetricObj ectProperty(:являетсяКомпонентом)
Obj ectPropertyDomain(:являетсяКомпонентом :ИсполнительныйКомпонентРобота)
Obj ectPropertyDomain(:являетсяКомпонентом :КоммуникационныйКомпонентРобота)
ObjectPropertyDomain(:являетсяКомпонентом :СенсорныйКомпонентРобота)
ObjectPropertyRange(:являетсяКомпонентом :ИнтерфейсРобота) ############################
# Classes
############################
# Class: :ИнтерфейсРобота (:ИнтерфейсРобота)
SubClassOf(:ИнтерфейсРобота Устройства)
# Class: :ИсполнительныйКомпонентРобота (:ИсполнительныйКомпонентРобота)
SubClassOf(ИсполнительныйКомпонентРобота :КомпонентыРобота)
# Class: :КоммуникационныйКомпонентРобота (:КоммуникационныйКомпонентРобота) SubClassOf(:КоммуникационныйКомпонентРобота :КомпонентыРобота)
# Class: :КомпонентыРобота (:КомпонентыРобота)
SubClassOf(:КомпонентыРобота :Робот)
# Class: :СенсорныйКомпонентРобота (:СенсорныйКомпонентРобота)
SubClassOf(:СенсорныйКомпонентРобота :КомпонентыРобота)
5.9 Допускается объединение компонентов робота в системы или модули.
5.10 С помощью понятия СистемаУправленияРоботом в онтологическом смысле следует описывать искусственную систему, состоящую из взаимодействующих устройств, выполняющих функцию обрабатывающих компонентов робота. Следует учитывать, что их взаимодействие происходит в рамках процесса, являющегося экземпляром класса КомпьютерныйПроцесс (ComputerProcess).
5.11 С помощью понятия СенсорнаяСистемаРобота в онтологическом смысле следует описывать искусственную систему, состоящую из взаимодействующих устройств, выполняющих функцию сенсорных компонентов робота. Следует учитывать, что их взаимодействие происходит в рамках процесса, являющегося экземпляром класса КомпьютерныйПроцесс (ComputerProcess).
5.12 С помощью понятия ИсполнительнаяСистемаРобота в онтологическом смысле следует описывать искусственную систему, состоящую из взаимодействующих устройств, выполняющих функцию исполнительных компонентов робота.
5.13 С помощью понятия КоммуникационнаяСистемаРобота в онтологическом смысле следует описывать искусственную систему, состоящую из взаимодействующих устройств, выполняющих функцию коммуникационных компонентов робота. Следует учитывать, что их взаимодействие происходит в рамках процесса, являющегося экземпляром класса КомпьютерныйПроцесс (ComputerProcess).
5.14 С помощью понятия ВычислительнаяСистемаРобота в онтологическом смысле следует описывать искусственную систему, состоящую из взаимодействующих устройств, выполняющих функцию обрабатывающих компонентов робота. Следует учитывать, что их взаимодействие происходит в рамках процесса, являющегося экземпляром класса КомпьютерныйПроцесс (ComputerProcess).
5.15 С помощью понятия НавигационнаяСистемаРобота в онтологическом смысле следует описывать искусственную систему, состоящую из взаимодействующих устройств, выполняющих функцию навигационных компонентов робота. Следует учитывать, что их взаимодействие происходит в рамках процесса, являющегося экземпляром класса КомпьютерныйПроцесс (ComputerProcess).
5.16 С помощью понятия МодульРобота в онтологическом смысле следует описывать искусственную систему, состоящую из взаимодействующих компонентов робота.
УДК 165:629.01:62-5:006.3/.8
ОКС 25.040.30
01.040.35
35.060
Ключевые слова: роботы, робототехнические устройства, онтология, робототехника, понятия, отношения, составная часть
Редактор Н.А. Аргунова Технический редактор В.Н. Прусакова Корректор И.А. Королева Компьютерная верстка И.А. Налейкиной
Сдано в набор 25.09.2023. Подписано в печать 28.09.2023. Формат 60*841/8. Гарнитура Ариал.
Усл. печ. л. 1,86. Уч.-изд. л. 1,46.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}