ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ГОСТР
60.5.9.1—
2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
РОБОТЫ СЕРВИСНЫЕ
Устройства захватные. Типы, номенклатура основных параметров, присоединительные размеры
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 РАЗРАБОТАН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 31 августа 2023 г. № 782-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Нормативные ссылки
3 Термины и определения
4 Классификация захватных устройств
5 Типы и присоединительные размеры механических интерфейсов
6 Номенклатура основных параметров
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Конструктивные элементы» и распространяется на сервисные манипуляционные роботы. Настоящий стандарт определяет основные типы захватных устройств, номенклатуру основных параметров и присоединительные размеры.
ГОСТ Р 60.5.9.1—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
РОБОТЫ СЕРВИСНЫЕ
Устройства захватные.
Типы, номенклатура основных параметров, присоединительные размеры
Robots and robotic devices. Service robots. Grippers.
Types, nomenclature of basic parameters, connecting dimensions
Дата введения — 2024—01—01
1 Область применения
1.1 Настоящий стандарт устанавливает типы и номенклатуру основных параметров захватных устройств сервисных роботов.
1.2 Настоящий стандарт устанавливает типы и присоединительные размеры механических интерфейсов захватных устройств сервисных роботов.
1.3 Требования настоящего стандарта распространяются на сервисные манипуляционные роботы.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ ISO 13857 Безопасность машин. Безопасные расстояния для предохранения верхних и нижних конечностей от попадания в опасную зону
ГОСТ Р 60.0.0.2—2016 Роботы и робототехнические устройства. Классификация
ГОСТ Р 60.0.2.1—2016 Роботы и робототехнические устройства. Общие требования по безопасности
ГОСТ Р 60.2.2.1/ИСО 13482:2014 Роботы и робототехнические устройства. Требования по безопасности для роботов по персональному уходу
ГОСТ Р 60.3.0.2/ИСО 14539:2000 Роботы и робототехнические устройства. Роботы промышленные манипуляционные. Перемещение объектов с помощью захватного устройства зажимного типа. Термины, определения и представление характеристик
ГОСТ Р 60.3.1.1/ИСО 9946:1999 Роботы промышленные манипуляционные. Представление характеристик
ГОСТ Р 60.3.4.1/ИСО 9409-1:2004 Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Круглые фланцы
ГОСТ Р 60.3.4.2/ИСО 9409-2:2002 Роботы и робототехнические устройства. Промышленные манипуляционные роботы. Механические интерфейсы. Стержни
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого
Издание официальное
стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 60.3.0.2, а также следующие термины с соответствующими определениями:
3.1 быстросменное захватное устройство: Сменное захватное устройство, для замены которого не требуется использование инструментов.
3.2 вакуумное захватное устройство: Захватное устройство, в котором удержание объекта осуществлено посредством разрежения воздуха в замкнутой полости рабочего элемента.
3.3
захватное устройство: Рабочий орган, сконструированный для захватывания и удержания объектов.
[ГОСТ Р 60.0.0.4—2023, статья 4.13]
3.4
робот: Программируемый исполнительный механизм, обладающий определенным уровнем автономности и предназначенный для выполнения перемещения, манипулирования или позиционирования.
Примечание 1 — В состав робота входит система управления.
Примечание 2 — Примерами конструктивных разновидностей роботов являются манипулятор, мобильная платформа и носимый робот.
[ГОСТ Р 60.0.0.4—2023, статья 3.1]
3.5
сервисный робот: Робот для персонального или профессионального использования, который выполняет задания, полезные для людей или оборудования.
Примечание 1 — Задания при персональном использовании включают перемещение или обслуживание объектов, транспортировку, физическую поддержку, предоставление руководств или информации, уход, приготовление пищи и обработку продуктов, уборку.
Примечание 2 — Задания при профессиональном использовании включают осмотр, наблюдение, манипулирование объектами, перевозку людей, предоставление руководств или информации, приготовление пищи и обработку продуктов, уборку.
[ГОСТ Р 60.0.0.4—2023, статья 3.7]
3.6 магнитное захватное устройство: Захватное устройство, в котором удержание объекта осуществлено посредством действия магнитных сил.
3.7
механический интерфейс: Монтажная поверхность на конце манипулятора, к которой крепится рабочий орган.
[ГОСТ Р 60.0.0.4—2023, статья 4.11]
3.8 механическое захватное устройство: Захватное устройство, в котором удержание объекта осуществлено под действием реакций в точках (зонах) контакта с рабочими элементами, создаваемых приводом или собственным весом объекта.
3.9 несменное захватное устройство: Жестко закрепленное на манипуляторе сервисного робота захватное устройство, замена которого в процессе эксплуатации не предусмотрена.
3.10
привод (робота): Силовой механизм, преобразующий электрическую, гидравлическую, пневматическую или любую другую энергию для осуществления движения робота.
[ГОСТ Р 60.0.0.4—2023, статья 4.1]
3.11
рабочий орган: Устройство, специально разработанное для закрепления на механическом интерфейсе с целью обеспечить выполнение задания роботом.
Пример — Захватное устройство, сварочный пистолет, краскопульт.
[ГОСТ Р 60.0.0.4—2023, статья 4.12]
3.12 сменное захватное устройство: Захватное устройство, которое может быть заменено в автоматическом или ручном режиме.
3.13 соединительное устройство рабочего органа: Фланец или стержень на конце запястья и фиксирующие устройства или дополнительные детали, закрепляющие рабочий орган на конце запястья.
3.14 устройство смены захватного устройства: Интерфейс, который служит для временной фиксации в нерабочем положении захватного устройства на сервисном роботе.
4 Классификация захватных устройств
4.1 Общие положения
4.1.1 Захватные устройства сервисных роботов классифицируют по следующим признакам:
- принципу действия;
- типу крепления;
- типу приводов;
- типу механизма передачи мощности;
- типу захвата;
- типу захватывания;
- геометрическим особенностям зажимных элементов;
- типу управления;
- типу интерфейса с роботом.
4.1.2 Согласно ГОСТ Р 60.0.0.2—2016, 5.2, сервисные роботы классифицируют по возможности передвижения и области применения. Классификация по грузоподъемности должна быть определена в стандартах применительно к конкретным областям применения сервисных роботов. Поэтому захватные устройства также не классифицируют по грузоподъемности.
4.1.3 Массу и размеры захватываемого предмета, а также усилие захватывания не классифицируют, но учитывают в качестве основных параметров захватных устройств согласно разделу 6.
4.2 Типы захватных устройств по принципу действия
4.2.1 По принципу действия захватные устройства разделяют:
- на захватные устройства зажимного типа;
- захватные устройства незажимного типа.
4.2.2 Захватные устройства зажимного типа разделяют:
а) по числу степеней подвижности:
1) линейное захватное устройство с числом степеней подвижности — 1,
2) плоскостное захватное устройство с числом степеней подвижности — 3,
3) пространственное захватное устройство с числом степеней подвижности — 6;
б) по типу движения пальцев:
1) уголковое захватное устройство,
2) параллельное захватное устройство.
4.2.3 Захватное устройство незажимного типа удерживает объекты и манипулирует ими с помощью зачерпывания, зацепления, прокалывания или прилипания либо посредством вакуумной/магнит-ной/электростатической левитации.
Захватные устройства незажимного типа разделяют:
а) на вакуумные;
б) магнитные:
1) электромагнитные,
2) с постоянными магнитами;
с использованием физико-химических свойств объектов манипулирования.
4.3 Захватные устройства по типу крепления
Захватные устройства по типу крепления разделяют:
- на сменные захватные устройства, в том числе быстросменные захватные устройства;
- несменные захватные устройства.
4.4 Захватные устройства по типу приводов
4.4.1 Механические захватные устройства сервисных роботов подразделяют на устройства:
- с приводом;
- без привода.
4.4.2 Механические захватные устройства по типу привода подразделяют:
- на пневматические;
- гидравлические;
- электромеханические;
- прочие.
4.5 Захватные устройства по типу механизма передачи мощности
По типу передачи мощности от привода к пальцам захватные устройства разделяют на устройства:
- с винтовой передачей;
- зубчатой передачей;
- кулачковой передачей:
- пружинной передачей;
- прямым приводом;
- цепной передачей.
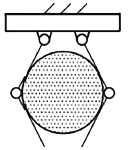
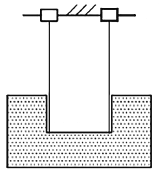
4.6 Захватные устройства по типу захвата
По типу захвата захватные устройства разделяют на устройства с захватом:
- по форме;
- по усилию;
- с внешней стороны [см. рисунки 1 а) и 1 б)];
- с внутренней стороны [см. рисунок 1 в)].
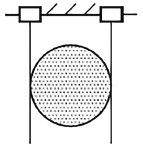
Рисунок 1 — Разные варианты захвата объекта
4.7 Захватные устройства по типу захватывания
Захватные устройства зажимного типа по типу захватывания разделяют на устройства:
- центрированного захватывания;
- нецентрированного захватывания;
- адаптивного захватывания;
- симметричного захватывания;
- ассиметричного захватывания;
- силового захватывания.
4.8 Захватные устройства по геометрическим особенностям зажимных элементов
Захватные устройства зажимного типа по геометрическим особенностям зажимных элементов разделяют:
- на соответствующие форме захватываемого объекта [см. рисунок 2 а)];
- несоответствующие форме захватываемого объекта [см. рисунок 2 б)].
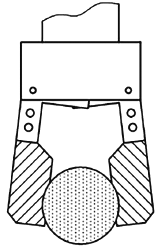
а)
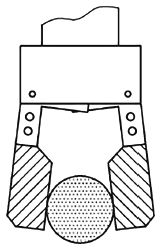
Рисунок 2 — Разные варианты исполнения зажимных элементов захватного устройства
4.9 Захватные устройства по типу управления пальцами
Захватные устройства зажимного типа по типу управления пальцами разделяют на устройства:
- с двухпозиционным управлением;
- управлением по положению;
- управлением по скорости;
- управлением по усилию;
- импедансным управлением;
- гибридным управлением.
4.10 Захватные устройства по типу интерфейса с роботом
4.10.1 Механические интерфейсы с роботом для захватных устройств сервисных роботов разделяют на следующие типы:
- круглые фланцы;
- стержни;
- прочие.
4.10.2 Тип механического интерфейса захватного устройства выбирают исходя из требуемой грузоподъемности. Использование круглого фланца в качестве механического интерфейса рекомендуется в тех случаях, когда прочность стержня недостаточна для предполагаемых нагрузок.
5 Типы и присоединительные размеры механических интерфейсов
5.1 Основные размеры, назначение и маркировка механических интерфейсов типа круглого фланца должны соответствовать ГОСТ Р 60.3.4.1.
5.2 Основные размеры, назначение и маркировка механических интерфейсов типа стержня должны соответствовать ГОСТ Р 60.3.4.2.
6 Номенклатура основных параметров
6.1 Номенклатуру основных параметров захватных устройств сервисных роботов следует выбирать на основе номенклатуры характеристик, определенных в ГОСТ Р 60.3.1.1.
Номенклатура основных параметров захватных устройств сервисных роботов приведена в таблице 1.
Таблица 1 — Номенклатура основных параметров захватных устройств
Наименование параметра | Обозначение параметра |
Номинальная сила захватывания, Н | |
Максимальное усилие удерживания, Н | — |
Максимальное усилие манипулирования, Н | — |
Максимально допустимый момент на пальце, Нм | — |
Площадь поверхности удерживания, мм | S |
Время захватывания (отпускания), с | tz |
Характерные размеры захватываемого предмета, мм: | — |
- максимальные | — |
- минимальные | — |
Масса захватного устройства, кг | mz |
Механический интерфейс: | — |
Габаритные размеры захватного устройства, мм | — |
Вид привода | — |
Количество приводов | — |
Номинальная мощность приводов, Вт | — |
Параметры питания: | — |
- напряжение, В | и |
- потребляемая мощность, Вт | Р |
- давление рабочего тела, МПа | Р |
Условия эксплуатации: | — |
- диапазон температуры, °C | т |
- относительная влажность, % | — |
Показатели надежности: | — |
- установленная безотказная наработка, ч | — |
- установленный срок службы до капитального ремонта, лет | — |
- средняя наработка на отказ, циклов | — |
Окончание таблицы 1
Наименование параметра | Обозначение параметра |
- средний срок службы до капитального ремонта, лет | Т |
Безопасность: описание специальных мер предосторожности при работе захватного устройства, если они необходимы | — |
Примечание — В случае оснащения захватных устройств датчиками в номенклатуру основных параметров вводят их технические характеристики. | |
6.2 Требования безопасности к захватным устройствам сервисных роботов должны соответствовать ГОСТ Р 60.0.2.1—2016, 5.4. Проверку безопасности захватного устройства сервисного робота следует проводить согласно ГОСТ Р 60.0.2.1—2016, 6.20.
6.3 Руководство по использованию захватных устройств сервисных роботов должно содержать информацию о максимальных габаритах и/или массе и типе переносимых грузов.
6.4 Захватные устройства сервисных роботов должны быть спроектированы с учетом требований ГОСТ Р 60.2.2.1 и ГОСТ ISO 13857.
УДК 621.865.8:629.78:006.354
ОКС 25.040.30
Ключевые слова: роботы, робототехнические устройства, сервисные роботы, захватные устройства, параметры, присоединительные размеры, механический интерфейс, классификация
Редактор Л. С. Зимилова Технический редактор И.Е. Черепкова Корректор С.И. Фирсова Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 04.09.2023. Подписано в печать 12.09.2023. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 1,40. Уч.-изд. л. 1,20.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}