ГОСТ Р 58840-2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Автомобильные транспортные средства
БОРТОВЫЕ УСТРОЙСТВА РЕГИСТРАЦИИ СОБЫТИЙ
Общие технические требования и методы испытаний
Motor vehicles. On-Board Event Data Recorders. Performance requirements and test procedures
ОКС 35.240.60
Дата введения 2021-04-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт "НАМИ" (ФГУП "НАМИ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 056 "Дорожный транспорт"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 7 октября 2020 г. N 761-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Основной функцией бортовых устройств регистрации событий является сохранение параметров движения и окружающей обстановки транспортных средств категорий M и N, соответствующих [1], обладающих уровнем автоматизации 0-5 по ГОСТ Р 58823.
Целью сохранения данной информации является помощь в расследовании дорожно-транспортных происшествий; часть сохраненной информации может использоваться бортовыми системами помощи водителю при движении транспортного средства.
Анализируя сохраненные в бортовом устройстве регистрации событий данные, можно определить, что способствовало совершению ДТП: ошибка человека, сбой в системе автоматизированного управления или отказ других узлов транспортного средства.
В дорожных транспортных средствах указанных категорий должно быть организовано хранение данных, относящихся к параметрам движения транспортного средства, режимам работы и статусам его подсистем, влияющих на движение (включая бортовые системы помощи водителю и системы автоматизированного управления), а также воздействиям водителя на органы управления рассматриваемого транспортного средства.
1 Область применения
Настоящий стандарт распространяется на бортовые устройства регистрации событий (далее - БУРС), установленные на механические транспортные средства (далее - ТС) категорий M и N, соответствующие [1], обладающие уровнем автоматизации 0-5 по ГОСТ Р 58823, и устанавливает общие требования к БУРС и методы их испытаний.
Настоящий стандарт содержит терминологию, определение выходных данных, протокол инструмента вывода данных и процедуры оценки соответствия БУРС требованиям стандарта.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 14254 Степени защиты, обеспечиваемые оболочками (Код IP)
ГОСТ Р 58804 Автотранспортные средства. Системы удержания транспортного средства в занимаемой полосе движения. Общие технические требования и методы испытаний
ГОСТ Р 58808 Автотранспортные средства. Системы мониторинга слепых зон. Общие технические требования и методы испытаний
ГОСТ Р 58823 Автомобильные транспортные средства. Системы автоматизации вождения. Классификация и определения
ГОСТ Р 58824 Автомобильные транспортные средства. Системы адаптивного круиз-контроля. Общие технические требования и методы испытаний
ГОСТ Р 58839 Автомобильные транспортные средства. Системы опережающего экстренного торможения. Общие технические требования и методы испытаний
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 алгоритм управления защитой пешеходов: Процедура обнаружения столкновения с пешеходом, которая при необходимости активирует устройства защиты пешеходов в рассматриваемом ТС.
3.2 алгоритм управления защитой пассажиров: Процедура обнаружения столкновения или опрокидывания, которая при необходимости активирует устройства защиты пассажиров и водителя рассматриваемого ТС.
3.3 аутентификация и шифрование: Метод обеспечения подлинности записи БУРС и ее неизменности с момента создания и хранения с помощью инструмента считывания БУРС.
3.4 беззнаковые численные данные: Данные БУРС, имеющие только положительные или нулевые значения.
3.5 боковая подушка безопасности/боковая штора безопасности: Надувная система защиты пассажиров, обычно устанавливаемая на сиденье или боковые детали обивки салона ТС, которая срабатывает во время соответствующих боковых ударов или опрокидывания.
3.6 бортовое устройство регистрации событий; БУРС: Один или несколько электронных модулей рассматриваемого ТС, которые записывают данные временных рядов ТС и системы защиты пассажиров до и во время конкретных событий, определенных в настоящем стандарте, с целью извлечения данных после события.
Примечания
1 Эти данные не включают записи видеокамер и успешной самодиагностики систем рассматриваемого ТС.
2 Методы проведения испытаний БУРС приведены в приложении А.
3.7 верхний контрольный предел; ВКП: Максимально допустимое значение переменной.
3.8
дорожно-транспортное происшествие; ДТП: Транспортная авария, возникшая в процессе дорожного движения с участием транспортного средства и повлекшая за собой гибель людей и (или) причинение им тяжелых телесных повреждений, повреждение транспортных средств, дорог, сооружений, грузов или иной материальный ущерб. [ГОСТ 22.0.05-97, статья 3.4.6] |
3.9 восстанавливающееся устройство: Устройство защиты водителя, пассажиров или пешеходов, конструкция которого позволяет ему автоматически возвращаться в состояние, в котором оно может быть повторно использовано или при котором для повторного использования требуется только механическое воздействие.
3.10 временной ряд транспортного средства: Последовательность событий рассматриваемого ТС, каждое из которых характеризуется определенным набором зарегистрированных параметров, сохраненная в БУРС в порядке их происхождения.
3.11 двоичные данные: Данные, единица которых может принимать только два возможных состояния: 0 или 1.
Примечание - Двоичные данные используют для однозначного ответа "да" или "нет" (например, открыто или закрыто).
3.12 диапазон: Область допускаемых значений, находящаяся между ВКП и нижним контрольным пределом для данной переменной.
Примечание - Диапазон может включать значения для одной переменной или для нескольких переменных.
3.13 заблокированное событие: Запись БУРС, которая не перезаписывается последующими событиями.
3.14 заголовок отчета: Первый раздел отчета записей БУРС, который содержит информацию о ТС, инструмент считывания БУРС и запись БУРС, которая предоставляет оглавление для отчета.
3.15 запись: Процесс сохранения данных, подлежащих регистрации БУРС, в энергонезависимой памяти для последующего извлечения.
3.16 запись БУРС: Электронный(ые) файл(ы) данных, хранящий(е)ся в энергонезависимой памяти в одном или нескольких электронных блоках управления ТС после возникновения события.
3.17 захват данных: Процесс буферизации определенных данных на временном энергозависимом носителе, где они постоянно обновляются через регулярные промежутки времени.
Примечание - Эти данные могут быть использованы БУРС.
3.18 изменение скорости: Разность между начальным и конечным значениями скорости рассматриваемого ТС за время события в соответствии с данными БУРС.
3.19 инструмент считывания БУРС: Совокупность аппаратного и программного обеспечения, необходимого для подключения к разъему рассматриваемого ТС; аутентификации, шифрования и сохранения двоичной записи БУРС в файл на персональном компьютере и отображения на нем, а также открытия и подтверждения подлинности сохраненных непереведенных файлов, содержащих записи БУРС, и перевода их в читаемый отчет.
3.20 интерфейсное устройство: Устройство, позволяющее осуществлять связь между рассматриваемым ТС и персональным компьютером.
3.21 массив: Расположение элементов данных определенным методом.
Примечание - В БУРС массив состоит из расположения элементов данных, отобранных в определенные моменты в течение определенной продолжительности.
3.22 нижний контрольный предел; НКП: Минимально допустимое значение переменной.
3.23 нормальное ускорение: Компонент вектора ускорения точки ТС в вертикальном направлении. Нормальное ускорение считается положительным при направлении вниз.
3.24 нулевое время: Начало события дорожно-транспортного происшествия.
3.25 опорная поверхность: Поверхность, по которой в данный момент времени движется рассматриваемое ТС.
3.26 отсечка: Момент времени, в который датчик впервые достиг максимального значения своего допускаемого рабочего диапазона.
3.27 отчет о записи БУРС: Инструмент поиска и вывода данных БУРС, предназначенный для их сканирования и транслирования пользователю.
3.28 подписанные численные данные: Данные БУРС, имеющие положительные, отрицательные или нулевые значения.
Примечание - Достигнуто соглашение о хранении подписанных данных с использованием системы дополнения до двух. Такое дополнение двоичного числа определяется как значение, полученное путем вычитания числа из степени двойки (в частности, из 2N для N-битного дополнения до двух). Система дополнения до двух - это система, в которой отрицательные числа представлены двоичным дополнением к абсолютному значению.
3.29 поперечное ускорение: Компонент вектора ускорения точки рассматриваемого ТС в горизонтальной плоскости, направленный перпендикулярно к продольной оси рассматриваемого ТС.
Примечание - Поперечное ускорение считают положительным слева направо с точки зрения водителя, когда он сидит в рассматриваемом ТС, расположенном в направлении движения вперед.
3.30 пороговый триггер: Изменение скорости рассматриваемого ТС в продольном или поперечном направлении во время события фронтального, бокового или заднего столкновения, равное или превышающее 8 км/ч в интервале времени 150 мс.
Примечания
1 Для события опрокидывания: см. "Начало опрокидывания" в 5.3.1.
2 Для событий столкновения с пешеходами: см. "Начало события столкновения с пешеходом" в 5.2.1.
3.31 преднатяжитель: Устройство, которое активируется алгоритмом управления защитой пассажиров ТС и при необходимости натягивает ремень безопасности рассматриваемого ТС.
3.32 продольное ускорение: Компонент вектора ускорения точки ТС в направлении, параллельном продольной оси рассматриваемого ТС.
Примечание - Продольное ускорение считается положительным при направлении движения ТС вперед.
3.33 разблокированное событие: Запись БУРС, которая может быть перезаписана последующими событиями.
3.34 расположение сидений: Обозначение сидений рассматриваемого ТС в определенном порядке.
3.35 рассматриваемое транспортное средство; РТС: ТС, оснащенное БУРС и имеющее отношение к обсуждению.
________________
Например, участвующее в ДТП.
3.36 система координат транспортного средства: Система координат (ось и направление).
Примечания
1 Система координат представлена на рисунке 1.
2 Начало координат находится в центре массы ТС.
|

1 - точка начала координат ТС
Рисунок 1 - Оси движения ТС
3.37 сканирование записи (данных) БУРС: Процесс, с помощью которого инструмент считывания БУРС запрашивает, транслирует и отображает запись БУРС.
3.38 соответствие: Удовлетворение зарегистрированного значения требованиям настоящего стандарта или другим нормативам.
3.39 трансляция: Процесс, с помощью которого инструмент считывания БУРС использует информацию, принадлежащую производителю ТС, для преобразования данных, хранящихся в записи БУРС, и представления их в виде, воспринимаемом человеком.
3.40 ускорение; G: Степень изменения скорости как функция времени.
Примечания
1 В настоящем стандарте заглавная буква "G" используется для обозначения элемента данных для ускорения. Строчная буква "g" - это единица ускорения (1 g=9,80665 м/с).
2 Продольное, поперечное и нормальное ускорения обозначают соответственно GX, GY и GZ. G - интегральное (суммарное) ускорение.
3.41 устройство защиты пассажиров: Срабатывающее устройство для защиты пассажиров и водителя РТС при ДТП.
3.42 фронтальная подушка безопасности: Надувной элемент системы защиты водителя или переднего пассажира, который не требует действий с их стороны и используется для удовлетворения требования по защите при фронтальном столкновении.
4 Обозначения и сокращения
В настоящем стандарте использованы следующие сокращения:
ДВС - двигатель внутреннего сгорания;
ПО - программное обеспечение;
САУ - система автоматизированного управления ТС;
ЭБУ - электронный блок управления.
5 Определения событий
5.1 События фронтального, бокового и заднего столкновений
Событие фронтального/бокового/заднего столкновений - это ДТП или другое физическое явление, которое вызывает срабатывание подушек безопасности, порогового триггера фронтального/бокового/заднего столкновения или срабатывающего невосстанавливающегося защитного устройства, в зависимости от того, что наступит раньше. В целях записи данных о событиях в любой момент времени может происходить только одно событие фронтального/бокового/заднего столкновения.
На рисунке 2 представлены основные точки события столкновения в соответствии с положениями [2]*.
________________
* Поз. [2]-[9] см. раздел Библиография, здесь и далее по тексту. - .
|
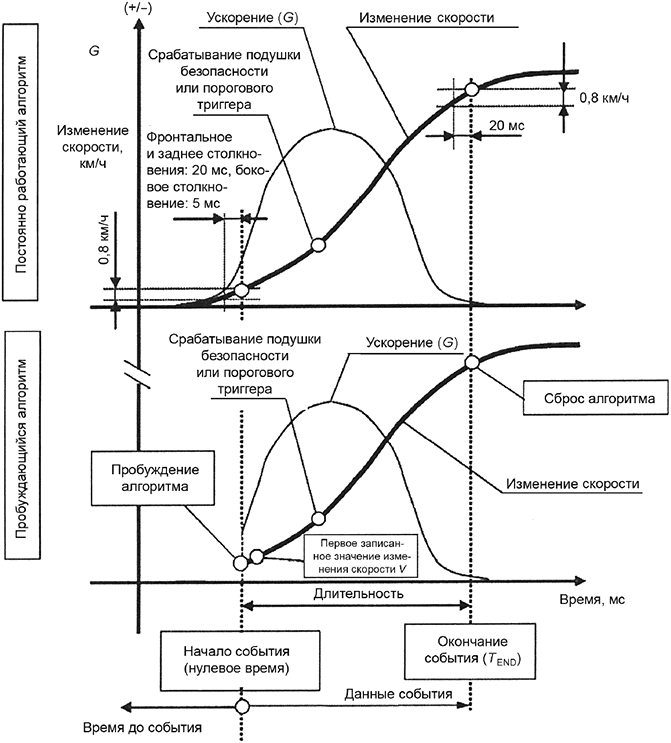
Рисунок 2 - Основные точки события столкновения
________________
Данный рисунок представляет собой упрощенное изображение данных события для иллюстрации основных точек и выполнен не в масштабе. В зависимости от направления удара изменение скорости и/или значения ускорения могут иметь положительные или отрицательные значения (см. рисунок 1).
Таким образом, в зависимости от обстоятельств фронтальное/боковое/заднее столкновения могут привести к срабатыванию либо к отказу от срабатывания системы защиты пассажиров. Для событий, которые сопровождаются вращением РТС (относительно любой оси), существует вероятность того, что РТС не всегда будет параллельно опорной поверхности во время столкновения.
Из-за комплексного характера ДТП меры по предотвращению столкновений и противодействию имевшим место событиям значительно различаются в зависимости от типов ТС, их производителей и обстоятельств события. Поэтому начало/окончание/продолжительность события столкновения должны оцениваться индивидуально, поскольку каждое ТС, участвующее в столкновении, может использовать разные временные ориентиры для этого события.
5.1.1 Начало события столкновения (нулевое время)
Начало события столкновения (нулевое время, см. рисунок 2) определяют следующим образом:
а) для систем с "пробуждающимися" алгоритмами управления защитой пассажиров это время, в которое активируется алгоритм управления защитой пассажиров; или
б) для постоянно работающих алгоритмов управления защитой пассажиров это время, когда суммарное изменение скорости превышает 0,8 км/ч (см. таблицу 1) и достигается в течение 20 мс в продольном направлении для события фронтального/заднего столкновения или в пределах периода времени 5 мс в боковом направлении для события бокового столкновения, или
в) происходит срабатывание невосстанавливающегося защитного устройства, при этом нулевое время не включает срабатывание последующих этапов многоэтапного срабатывания защитного устройства.
Примечание - Начало события столкновения не должно интерпретироваться как момент, когда РТС вступает в первый физический контакт с другим объектом. Начало события также не отмечает состояние, определяющее необходимость записи данных о событии для последующего извлечения. Целью определения начала события является начало сопоставления элементов данных из нескольких записывающих устройств на РТС.
Таблица 1 - Порог начала событий различных столкновений (постоянно работающий алгоритм)
Характеристика | Фронтальное столкновение | Боковое столкновение | Заднее столкновение |
Направление ускорения | Продольное | Продольное | Поперечное |
Суммарное изменение скорости за период времени |
|
|
|
Примечание - Раскрытие дополнительной ступени подушки безопасности не является началом события столкновения и, следовательно, не приводит к началу следующей записи БУРС.
5.1.2 Окончание события столкновения
Время окончания события столкновения ![]() зависит от типа алгоритма управления защитой пассажиров:
зависит от типа алгоритма управления защитой пассажиров:
а) для пробуждающихся алгоритмов управления защитой пассажиров ![]() соответствует моменту, когда сбрасывается алгоритм управления защитой пассажиров (см. рисунок 2). Если это условие не было выполнено к концу периода записи,
соответствует моменту, когда сбрасывается алгоритм управления защитой пассажиров (см. рисунок 2). Если это условие не было выполнено к концу периода записи, ![]() может быть определено как последняя записанная точка данных, или
может быть определено как последняя записанная точка данных, или
б) для постоянно работающих алгоритмов управления защитой пассажиров ![]() наступает, когда суммарное изменение скорости в продольном и боковом (если оно записывается) направлениях в течение периода времени 20 мс становится равным 0,8 км/ч или менее. Если это условие не было выполнено к концу периода записи,
наступает, когда суммарное изменение скорости в продольном и боковом (если оно записывается) направлениях в течение периода времени 20 мс становится равным 0,8 км/ч или менее. Если это условие не было выполнено к концу периода записи, ![]() может быть определено как последняя записанная точка данных.
может быть определено как последняя записанная точка данных.
5.1.3 Длительность столкновения
Длительность события столкновения - это временной интервал между началом события столкновения (нулевое время) и окончанием события столкновения ![]() . Длительность события столкновения не является заранее определенным интервалом времени и может значительно варьироваться для каждого события. Длительность события столкновения может превышать возможность записи времени БУРС.
. Длительность события столкновения не является заранее определенным интервалом времени и может значительно варьироваться для каждого события. Длительность события столкновения может превышать возможность записи времени БУРС.
5.2 Столкновение с пешеходами
Событие столкновения с пешеходами - это физическое событие, вызывающее срабатывание порогового триггера столкновения с пешеходом или срабатывание любого невосстанавливающегося устройства защиты, в зависимости от того, что наступит раньше. В целях записи данных о событии в любой момент времени может выполняться только одно событие, связанное с пешеходом.
5.2.1 Начало события столкновения с пешеходом: нулевое время
Начало события столкновения с пешеходом (нулевое время) определяется следующим образом:
а) для систем с пробуждающимися алгоритмами управления защитой пешеходов это время активации алгоритма управления защиты пешеходов, или
б) для постоянно работающих алгоритмов управления защитой пешеходов это время, когда алгоритм управления защитой пешеходов определяет, что был выполнен критерий нулевого времени, определенный для технологии распознавания; в защите пешеходов могут использоваться различные технологии обнаружения, которые требуют определения критериев нулевого времени, соответствующих их возможностям и конкретному применению, или
в) происходит срабатывание любого невосстанавливающегося устройства защиты пешеходов; нулевое время не включает срабатывание последующих этапов многоэтапного устройства защиты.
Примечание - Начало события не должно интерпретироваться как момент, когда РТС вступает в первый физический контакт с другим объектом. Начало события также не отмечает условие, определяющее, следует ли записывать данные события для последующего извлечения. Целью определения начала события является начало сопоставления элементов данных из нескольких записывающих устройств на РТС.
5.2.2 Окончание события столкновения с пешеходом
Окончание события столкновения с пешеходом ![]() зависит от типа алгоритма управления:
зависит от типа алгоритма управления:
а) для пробуждающихся алгоритмов управления защитой пешеходов ![]() наступает в момент, когда сбрасывается алгоритм управления защитой пешеходов. Если это условие не было выполнено к концу периода записи,
наступает в момент, когда сбрасывается алгоритм управления защитой пешеходов. Если это условие не было выполнено к концу периода записи, ![]() может быть определено как последняя записанная точка данных;
может быть определено как последняя записанная точка данных;
б) для непрерывно работающих алгоритмов управления защитой пешеходов ![]() наступает, когда определено, что событие завершилось, в соответствии с установками конкретного производителя РТС или поставщика системы управления защитой пассажиров. Если это условие не было выполнено к концу периода записи,
наступает, когда определено, что событие завершилось, в соответствии с установками конкретного производителя РТС или поставщика системы управления защитой пассажиров. Если это условие не было выполнено к концу периода записи, ![]() может быть определено как последняя записанная точка данных.
может быть определено как последняя записанная точка данных.
5.2.3 Длительность события столкновения с пешеходом
Длительность события столкновения с пешеходом - это интервал времени между началом события с участием пешехода (нулевое время) и окончанием события с участием пешехода ![]() . Продолжительность события столкновения с пешеходом не является заранее определенным интервалом времени и может значительно варьироваться для каждого события. Продолжительность события с участием пешехода может превышать время записи БУРС.
. Продолжительность события столкновения с пешеходом не является заранее определенным интервалом времени и может значительно варьироваться для каждого события. Продолжительность события с участием пешехода может превышать время записи БУРС.
5.3 Опрокидывание
Событие опрокидывания - это физическое событие, в котором алгоритм управления защитой пассажиров инициирует срабатывание системы защиты пассажиров при опрокидывании. В целях записи данных события в любой момент времени может выполняться только одно событие опрокидывания. Из-за комплексного характера событий опрокидывания меры по предотвращению аварий и смягчению последствий для событий опрокидывания значительно различаются в зависимости от типа РТС, их производителей и обстоятельств события. Таким образом, события опрокидывания должны оцениваться индивидуально, поскольку разные РТС могут использовать разные временные ориентиры для события опрокидывания.
5.3.1 Начало события опрокидывания
Начало события опрокидывания (нулевое время) определяется следующим образом:
а) для систем с пробуждающимся алгоритмом управления защитой пассажиров при опрокидывании это время, в которое активируется алгоритм управления защитой пассажиров при опрокидывании;
б) для непрерывно работающих алгоритмов управления защитой пассажиров это время, в которое определено, что событие началось, определенное конкретным производителем РТС и поставщиком системы управления защитой пассажиров (например, суммарный угол или угловая скорость), или
в) происходит срабатывание системы защиты пассажиров при опрокидывании. Это время не включает срабатывание последующих этапов многоэтапного устройства защиты.
Начало события опрокидывания также не отмечает условие, определяющее необходимость записи данных событий, связанных с этим событием, для последующего извлечения.
Кроме того, начало события опрокидывания может не совпадать с моментом, когда РТС начинает опрокидываться.
5.3.2 Окончание события опрокидывания
Окончание события опрокидывания ![]() зависит от типа алгоритма управления:
зависит от типа алгоритма управления:
- для пробуждающихся алгоритмов управления защитой пассажиров ![]() наступает в момент, когда сбрасывается алгоритм управления защитой пассажиров. Если это условие не было выполнено к концу периода записи,
наступает в момент, когда сбрасывается алгоритм управления защитой пассажиров. Если это условие не было выполнено к концу периода записи, ![]() может быть определено как последняя записанная точка данных;
может быть определено как последняя записанная точка данных;
- для непрерывно работающих алгоритмов управления защитой пассажиров ![]() наступает, когда определено, что событие завершилось, в соответствии с требованиями конкретного поставщика РТС и поставщика системы управления защитой пассажиров (например, суммарный угол или угловая скорость). Если это условие не было выполнено к концу периода записи,
наступает, когда определено, что событие завершилось, в соответствии с требованиями конкретного поставщика РТС и поставщика системы управления защитой пассажиров (например, суммарный угол или угловая скорость). Если это условие не было выполнено к концу периода записи, ![]() может быть определено как последняя записанная точка данных.
может быть определено как последняя записанная точка данных.
Окончание события опрокидывания не должно интерпретироваться как момент полной остановки РТС.
5.3.3 Длительность события опрокидывания
Длительность события опрокидывания - это интервал времени между началом события опрокидывания (нулевое время) и концом события опрокидывания ![]() .
.
Длительность события опрокидывания не является заранее определенным интервалом времени и может значительно варьироваться для каждого события. Длительность события опрокидывания может превышать время записи БУРС.
5.4 Требования к сбору данных
БУРС должно регистрировать и записывать элементы данных для событий в соответствии со следующими условиями и обстоятельствами:
а) при срабатывании подушки безопасности (для фронтальных, боковых, задних столкновений или при опрокидывании) регистрируются и сохраняются текущие данные о срабатывании. Записи событий срабатывания подушки безопасности должны быть заблокированы, чтобы предотвратить их стирание последующими событиями;
б) в случае события, не соответствующего критериям в перечислении а), регистрируются и сохраняются только данные текущего события;
в) типы событий, описанные в определениях событий (см. 5.1-5.3), могут быть записаны отдельно в разных записях и/или в разных электронных блоках;
г) БУРС должно быть способно записывать не менее двух событий при соблюдении следующих условий:
1) если доступна запись БУРС, в которой отсутствуют данные предыдущего события, записываются данные текущего события;
2) если запись БУРС, в которой отсутствуют данные предыдущего события, недоступна, а текущее событие вызвало срабатывание подушки безопасности, производитель должен перезаписать предыдущее событие, в котором не было зафиксировано срабатывание подушки безопасности, если она существует. Если текущее событие не привело к срабатыванию подушки безопасности, производитель может выбрать: либо перезаписать любые предыдущие данные о событии, которые не привели к срабатыванию подушки безопасности, данными текущего события, либо не записывать данные текущего события. Если подушки безопасности сработали на всех предыдущих событиях, производитель может не записывать текущее событие.
6 Элементы данных
6.1 Доступность элементов данных
Элементы данных, перечисленные в настоящем стандарте, имеют значение только в том случае, если РТС оборудовано соответствующим датчиком и/или системой ТС, и их статус принимается БУРС через коммуникационную шину ТС. Каждый производитель оборудования может определить, какие элементы данных применимы к БУРС РТС; инструкции для производителей оборудования приведены в разделе 8 для рекомендуемой методологии записи элементов данных.
6.2 Классификация элементов данных
Классификации элементов данных предназначены для характеристики общей доступности элементов данных. Перечисленные ниже классификации не предназначены для указания на то, какие элементы данных должны быть включены в БУРС.
Каждый элемент данных, включенный в настоящий стандарт, относят к одному из следующих типов.
6.2.1 Тип I
Элементы данных в настоящее время содержатся в одном или нескольких ЭБУ либо в коммуникационной шине в большинстве выпускаемых ТС, за исключением ряда ТС.
6.2.2 Тип II
Элементы данных в настоящее время содержатся в одном или нескольких ЭБУ либо в коммуникационной шине в некоторых ТС, но не всех производителей.
6.2.3 Тип III
Элементы данных:
- не находятся в одном или нескольких ЭБУ либо в коммуникационной шине ни в одном из существующих ТС или
- обнаружены только в небольшом проценте ТС. Кроме того, этот элемент данных может быть закрытым или не подлежать извлечению.
6.2.4 Тип IV
Элементы данных, относящиеся к функциям системы автоматизации управления уровней 3, 4 или 5 в соответствии с ГОСТ Р 58823 (см. раздел 11).
6.3 Виды элементов данных
6.3.1 Данные временного ряда
Динамические данные РТС, собранные с определенной частотой с более чем одной точки данных, необходимой для завершения набора данных.
6.3.2 Статические данные
Любой элемент данных, который записывается только один раз за событие.
6.4 Значения элементов данных
6.4.1 Данные/сигнал недоступен
"Данные/сигнал недоступен" указывает условие, когда в наборе выходных данных не существует определенного значения данных. Для указания этого условия следует использовать уникальное значение (например, $FF, $FFFF и т.д. для беззнаковых данных или $81, $8001 и т.д. для подписанных данных).
6.4.2 Неверные данные
"Неверные данные" указывает, что исходный источник (например, ЭБУ или датчик) не может генерировать действительные данные. Уникальное значение должно использоваться исходным источником для указания этого условия (например, $FE, $FFFE и т.д. для беззнаковых данных или $80, $8000 и т.д. для данных со знаком).
6.4.3 Статус элемента данных
Сообщаемое состояние элемента данных, который отправляется по коммуникационной шине ТС или поступает по электрической цепи, не обязательно является фактическим физическим состоянием переключателя или датчика. Элементы данных, которые получают информацию из сообщения коммуникационной шины (например, состояние блокировки двери), указывают заданное состояние соответствующего переключателя или датчика. Элементы данных, поступающие по электрической цепи (например, состояние ремня безопасности), указывают состояние электрической цепи, которая включает в себя соответствующий переключатель или датчик.
6.5 Точность элемента данных
Требования к точности, указанные для каждого элемента данных, применяются только в пределах диапазона соответствующего физического датчика. Если измерения, снятые датчиком, превышают проектный диапазон датчика, элемент сообщаемых данных должен указывать, что измерение впервые превысило проектный диапазон датчика.
7 Минимальный перечень рекомендованных элементов данных бортового устройства регистрации событий
7.1 Минимальный перечень рекомендованных элементов данных
Следующие элементы данных, которые определены в разделе 8, представляют собой минимальный перечень рекомендованных элементов данных, подлежащих записи:
а) изменение продольной скорости;
б) максимальное записанное изменение продольной скорости;
в) время до максимального зарегистрированного изменения продольной скорости;
г) скорость, отображенная ТС;
д) положение дроссельной заслонки двигателя в процентах открытия (или положение педали управления двигателем в процентах нажатия);
е) рабочий тормоз, включение и выключение;
ж) цикл зажигания при событии;
и) цикл зажигания при сканировании;
к) состояние ремня безопасности водителя;
л) состояние светового индикатора системы защиты пассажиров;
м) время срабатывания устройства защиты пассажиров (для фронтальной подушки безопасности водителя, 1-я ступень раскрытия);
н) время срабатывания устройства защиты пассажиров (для фронтальной подушки безопасности пассажира, 1-я ступень раскрытия);
п) при нескольких событиях: количество событий;
р) время от события "X" до события "Y";
с) завершение записи данных о событии.
7.2 Дополнительные элементы данных
Следующие элементы данных, которые определены в разделе 8, должны быть записаны, если возможна их регистрация на РТС:
а) поперечное ускорение;
б) продольное ускорение;
в) нормальное ускорение;
г) изменение поперечной скорости;
д) максимальное записанное изменение поперечной скорости;
е) время записи максимального изменения поперечной скорости;
ж) время записи максимального результирующего изменения скорости;
и) число оборотов в минуту (мин);
к) скорость крена (или угол крена);
л) статус антиблокировочной системы;
м) статус электронной системы контроля устойчивости;
н) действия рулевым колесом;
п) состояние ремня безопасности переднего пассажира;
р) состояние выключателя подушки безопасности переднего пассажира;
с) время срабатывания устройства защиты пассажиров (для дополнительных ступеней подушки безопасности водителя);
т) время срабатывания устройства защиты пассажиров (для дополнительных ступеней фронтальной подушки безопасности пассажира);
у) время срабатывания устройства защиты пассажиров (для боковой подушки безопасности водителя);
ф) время срабатывания устройства защиты пассажиров (для боковой подушки безопасности переднего пассажира);
х) время срабатывания устройства защиты пассажиров (для шторы безопасности на стороне водителя/трубчатой подушки безопасности);
ц) время срабатывания устройства защиты пассажиров (для боковой шторы безопасности пассажира/трубчатой подушки безопасности);
ч) время срабатывания устройства защиты пассажиров (для преднатяжителя ремня безопасности водителя);
ш) время срабатывания устройства защиты пассажиров (для преднатяжителя ремня безопасности переднего пассажира);
щ) переключатель положения направляющей сиденья водителя (положение "вперед");
з) переключатель положения в направляющей сиденья переднего пассажира (положение "вперед");
ю) размер водителя по классификации;
я) размер переднего пассажира по классификации.
8 Определения элементов данных
8.1 Данные об ускорении
8.1.1 Поперечное ускорение
Поперечным ускорением называют компонент "Y" вектора интегрального ускорения G точки РТС (см. рисунок 1). Поперечное ускорение считают положительным слева направо с точки зрения водителя, когда он сидит в ТС, обращенном в направлении движения РТС вперед (см. таблицу 2).
Таблица 2 - Данные о поперечном ускорении точки рассматриваемого транспортного средства
Обозначение | GY |
Минимальный шаг | 0,5 |
Минимальный диапазон | От минус 5 до 5 |
Минимальная погрешность | ±5% в пределах измерения физического датчика |
Минимальный интервал записи | От 0 до 250 мс относительно нулевого времени |
Минимальная частота записей | 500 записей в секунду |
Тип элемента данных | II |
Примечание - Из-за возможного для акселерометра насыщения во время определенных событий этот элемент данных может не подходить для использования при реконструкции события. Однако он может быть полезен для других целей, таких как реконструкция решения о срабатывании.
8.1.2 Продольное ускорение
Продольным ускорением называют компонент "X" вектора интегрального ускорения G точки РТС (см. рисунок 1). Продольное ускорение считают положительным в направлении движения РТС вперед (см. таблицу 3).
Таблица 3 - Данные о продольном ускорении точки рассматриваемого транспортного средства
Обозначение | GX |
Минимальный шаг | 0,5 |
Минимальный диапазон | От минус 50 до 50 |
Минимальная погрешность | ±5% в пределах измерения физического датчика |
Минимальный интервал записи | От 0 до 250 мс относительно нулевого времени |
Минимальная частота записей | 500 записей в секунду |
Тип элемента данных | II |
Примечание - Из-за возможного для акселерометра насыщения во время определенных событий этот элемент данных может не подходить для использования при реконструкции события. Однако он может быть полезен для других целей, таких как реконструкция решения о срабатывании.
8.1.3 Нормальное ускорение
Нормальным ускорением называют компонент "Z" вектора интегрального ускорения G точки РТС (см. рисунок 1). Нормальное ускорение считают положительным при направлении движения РТС вниз (см. таблицу 4).
Таблица 4 - Данные о нормальном ускорении точки рассматриваемого транспортного средства
Обозначение | GZ |
Минимальный шаг | 0,5 |
Минимальный диапазон | От минус 5 до 5 |
Минимальная погрешность | ±5% в пределах измерения физического датчика |
Минимальный интервал записи | От 0 до 250 мс относительно нулевого времени |
Минимальная частота записей | 500 записей в секунду |
Тип элемента данных | II |
Примечание - Из-за возможного для акселерометра насыщения во время определенных событий этот элемент данных может не подходить для использования при реконструкции события. Однако он может быть полезен для других целей, таких как реконструкция решения о срабатывании.
8.1.4 Интегральное ускорение
Интегральным ускорением называют результирующее ускорение конкретной точки РТС. Для ориентации акселерометра используют следующее правило: компонент движения точки вправо (при движении РТС вперед) имеет знак "+", влево - знак "-"; компонент движения точки вперед по ходу движения РТС имеет знак "+", назад - знак "-"; компонент движения точки вниз (в направлении к опорной поверхности) имеет знак "+", от опорной поверхности - знак "-" (см. таблицу 5).
Таблица 5 - Данные об интегральном ускорении точки рассматриваемого транспортного средства
Обозначение | G |
Минимальный шаг | 2 |
Минимальный диапазон | От минус 100 до 100 |
Минимальная погрешность | ±5% в пределах измерения физического датчика |
Минимальный интервал записи | От 0 до 50 мс относительно нулевого времени |
Минимальная частота записей | 500 записей в секунду |
Тип элемента данных | III |
Примечание - Из-за возможного насыщения акселерометра во время определенных событий этот элемент данных может не подходить для использования при реконструкции события. Однако он может быть полезен для других целей, таких как реконструкция решения о срабатывании.
8.2 Дата ДТП
8.2.1 Дата ДТП - Год
Год, в котором произошло ДТП (см. таблицу 6).
Таблица 6 - Год, в котором произошло дорожно-транспортное происшествие
Единица измерения | Год |
Минимальный шаг | 1 |
Минимальный диапазон | От 2000 до 2253 |
Минимальная погрешность | 0 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Эти данные должны использоваться в совокупности с данными 8.2.2 и 8.2.3. Точность этих данных может зависеть от источника данных, который их предоставляет.
8.2.2 Дата ДТП - Месяц
Месяц, в котором произошло ДТП (см. таблицу 7).
Таблица 7 - Месяц, в котором произошло дорожно-транспортное происшествие
Единица измерения | Месяц |
Минимальный шаг | 1 |
Минимальный диапазон | От 1 до 12 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Эти данные должны использоваться в совокупности с данными 8.2.1 и 8.2.3. Точность этих данных может зависеть от источника данных, который их предоставляет.
8.2.3 Дата ДТП - День
День, в который произошло ДТП (см. таблицу 8).
Таблица 8 - День, в который произошло дорожно-транспортное происшествие
Единица измерения | День |
Минимальный шаг | 1 |
Минимальный диапазон | От 1 до 31 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Эти данные должны использоваться в совокупности с данными 8.2.1 и 8.2.2. Точность этих данных может зависеть от источника данных, который их предоставляет.
8.3 Время ДТП
8.3.1 Время ДТП - Час
Часовая составляющая времени ДТП (см. таблицу 9).
Таблица 9 - Час, в который произошло дорожно-транспортное происшествие
Единица измерения | Час |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 23 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Эти данные должны использоваться в совокупности с данными 8.3.2 и 8.3.3. Точность этих данных может зависеть от источника данных, который их предоставляет.
8.3.2 Время ДТП - Минута
Минутная составляющая времени ДТП (см. таблицу 10).
Таблица 10 - Минута, в которую произошло дорожно-транспортное происшествие
Единица измерения | Минута |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 59 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Эти данные должны использоваться в совокупности с данными 8.3.1 и 8.3.3. Точность этих данных может зависеть от источника данных, который их предоставляет.
8.3.3 Время ДТП - Секунда
Секундная составляющая времени ДТП (см. таблицу 11).
Таблица 11 - Секунда, в которую произошло дорожно-транспортное происшествие
Единица измерения | Секунда |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 59 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Эти данные должны использоваться в совокупности с данными 8.3.1 и 8.3.2. Точность этих данных может зависеть от источника данных, который их предоставляет.
8.4 Статус системы адаптивного круиз-контроля (для систем автоматизации управления уровня 1)
Статус системы адаптивного круиз-контроля по ГОСТ Р 58823 и по ГОСТ Р 58824 (выбирается и сохраняется в соответствии с таблицей 12).
Таблица 12 - Статус системы адаптивного круиз-контроля рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Активен режим управления, сбой, неисправность, система выключена, система включена, но неактивна. Опциональные параметры и значения: значение скорости, значение дистанции, перехват управления водителем, активно торможение |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.5 Температура окружающего воздуха
Температура окружающего воздуха (см. таблицу 13) измеряется бортовыми системами РТС.
Таблица 13 - Температура окружающего воздуха
Единица измерения | °С |
Минимальный шаг | 1 |
Минимальный диапазон | От минус 40 до 80 |
Минимальная погрешность | ±10% |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
8.6 Статус антиблокировочной системы рассматриваемого транспортного средства
Статус работы антиблокировочной системы РТС (см. таблицу 14).
Таблица 14 - Статус работы антиблокировочной системы рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Включена, активна, отказ, отключена |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | II |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.7 Статус системы контроля слепых зон рассматриваемого транспортного средства
Статус работы системы контроля слепых зон РТС в соответствии с ГОСТ Р 58808 (см. таблицу 15).
Таблица 15 - Статус работы системы контроля слепых зон рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Включена, выключена, отказ, неисправность, активен режим предупреждения |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.8 Статус тормозной системы рассматриваемого транспортного средства
Для указания на торможение РТС может использоваться один или несколько следующих элементов данных.
8.8.1 Опережающее экстренное торможение
Тормозная система, предназначенная для применения автоматического торможения с целью предотвращения ДТП или снижения тяжести его последствий, соответствующая ГОСТ Р 58839 (см. таблицу 16).
Таблица 16 - Статус работы системы опережающего экстренного торможения рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Активна, неактивна, отказ, неисправность, активен режим предупреждения |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.8.2 Положение педали тормоза
Регистратор положения педали тормоза (нажата или не нажата) (см. таблицу 17).
Таблица 17 - Запись о положении педали тормоза рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.8.3 Давление в тормозной системе
Показания датчика давления, расположенного на главном тормозном цилиндре (см. таблицу 18).
Таблица 18 - Значения давления в тормозной системе рассматриваемого транспортного средства
Единица измерения | кПа |
Минимальный шаг | 100 |
Минимальный диапазон | 0-10000 |
Минимальная погрешность | ±10% от полного диапазона |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.8.4 Запрос на торможение
Включение тормозной системы водителем или РТС (см. таблицу 19).
Таблица 19 - Включение тормозной системы водителем или рассматриваемым транспортным средством
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.8.5 Рабочая тормозная система, включена или выключена
Статус датчика педали тормоза, который используется для определения включения рабочей тормозной системы водителем РТС (см. таблицу 20).
Таблица 20 - Включение тормозной системы водителем рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Включена или выключена |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | I |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.9 Статус системы предупреждения о столкновениях
Статус системы предупреждения о столкновениях (см. таблицу 21).
Таблица 21 - Статус системы предупреждения о столкновениях
Единица измерения | Неприменимо |
Минимальный шаг | Включена, выключена, сбой, неисправность, состояние предупреждения |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.10 Статус системы круиз-контроля
Статус системы круиз-контроля (см. таблицу 22).
Таблица 22 - Статус системы круиз-контроля
Единица измерения | Неприменимо |
Минимальный шаг | Система управляет движением РТС; сбой; неисправность; сделан запрос на отключение; включена, но не управляет движением РТС, перехват водителем РТС |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.11 Изменение скорости
8.11.1 Изменение поперечной скорости
Изменение поперечной скорости за время события. Поперечное ускорение является поперечным компонентом результирующего изменения скорости (см. таблицу 23).
Таблица 23 - Изменение поперечной скорости рассматриваемого транспортного средства
Единица измерения | км/ч |
Минимальный шаг | 1 |
Минимальный диапазон | Минус 100-100 |
Минимальная погрешность | ±10% от полного диапазона |
Минимальный интервал записи | От 0 до 250 мс относительно нулевого времени или от 0 до окончания события столкновения +30 мс в зависимости от того, что меньше |
Минимальная частота записей | 100 записей в секунду |
Тип элемента данных | II |
8.11.2 Изменение продольной скорости
Изменение продольной скорости во время события. Продольное ускорение является продольным компонентом результирующего изменения скорости (см. таблицу 24).
Таблица 24 - Изменение продольной скорости рассматриваемого транспортного средства
Единица измерения | км/ч |
Минимальный шаг | 1 |
Минимальный диапазон | Минус 100-100 |
Минимальная погрешность | ±10% от полного диапазона |
Минимальный интервал записи | От 0 до 250 мс относительно нулевого времени или от 0 до окончания события столкновения +30 мс в зависимости от того, что меньше |
Минимальная частота записей | 100 записей в секунду |
Тип элемента данных | I |
8.11.3 Максимальное записанное изменение поперечной скорости
Максимальное значение суммарного изменения скорости, записанное БУРС РТС вдоль поперечной оси (см. таблицу 25).
Таблица 25 - Максимальное записанное изменение поперечной скорости рассматриваемого транспортного средства
Единица измерения | км/ч |
Минимальный шаг | 1 |
Минимальный диапазон | Минус 100-100 |
Минимальная погрешность | ±10% от полного диапазона |
Опорная точка отсчета | Точка данных в пределах минимального значения от 0 до 300 мс (относительно нулевого времени) |
Тип элемента данных | II |
Примечание - Эти данные должны использоваться в сочетании с 8.11.6.
8.11.4 Максимальное записанное изменение продольной скорости
Максимальное значение суммарного изменения скорости, записанное БУРС РТС вдоль продольной оси (см. таблицу 26).
Таблица 26 - Максимальное записанное изменение поперечной скорости рассматриваемого транспортного средства
Единица измерения | км/ч |
Минимальный шаг | 1 |
Минимальный диапазон | Минус 100-100 |
Минимальная погрешность | ±10% от полного диапазона |
Опорная точка отсчета | Точка данных в пределах минимального значения от 0 до 300 мс (относительно нулевого времени) |
Тип элемента данных | I |
Примечание - Эти данные должны использоваться в сочетании с 8.11.7.
8.11.5 Максимальное записанное изменение результирующей скорости
Коррелированное по времени максимальное значение кумулятивного изменения скорости, зафиксированное БУРС или обработанное во время сканирования данных вдоль продольной и смежных осей с добавлением вектора (см. таблицу 27).
Таблица 27 - Максимальное записанное изменение результирующей скорости рассматриваемого транспортного средства
Единица измерения | км/ч |
Минимальный шаг | 1 |
Минимальный диапазон | Минус 100-100 |
Минимальная погрешность | ±10% от полного диапазона |
Опорная точка отсчета | Точка данных в пределах минимального значения от 0 до 300 мс (относительно нулевого времени) |
Тип элемента данных | II |
Примечание 1 - Эти данные не могут быть записаны ЭБУ, но могут быть рассчитаны с помощью инструмента считывания БУРС во время формирования изображения на основе данных, записанных в ЭБУ.
Примечание 2 - Эти данные должны использоваться в сочетании с 8.11.8.
8.11.6 Время записи максимального изменения поперечной скорости
Интервал времени от нулевого времени до момента, в который обнаружено максимальное изменение поперечной скорости, записанное БУРС, вдоль поперечной оси (см. таблицу 28).
Таблица 28 - Время максимального изменения поперечной скорости рассматриваемого транспортного средства
Единица измерения | мс |
Минимальный шаг | 2,5 |
Минимальный диапазон | От 0 до 300 или от 0 до окончания события столкновения плюс 30 в зависимости от того, что меньше |
Минимальная погрешность | ±3 |
Опорная точка отсчета | Нулевое время |
Тип элемента данных | II |
Примечание - Эти данные должны использоваться в сочетании с 8.11.3. Этот элемент данных не имеет отношения к событиям, которые достигают минимального уровня изменения боковой скорости (например, события чисто фронтального столкновения).
8.11.7 Время записи максимального изменения продольной скорости
Интервал времени от нулевого времени до момента, в который обнаружено максимальное изменение продольной скорости, записанное БУРС, вдоль продольной оси (см. таблицу 29).
Таблица 29 - Время максимального изменения продольной скорости рассматриваемого транспортного средства
Единица измерения | мс |
Минимальный шаг | 2,5 |
Минимальный диапазон | От 0 до 300 или от 0 до окончания события столкновения плюс 30 в зависимости от того, что меньше |
Минимальная погрешность | ±3 |
Опорная точка отсчета | Нулевое время |
Тип элемента данных | I |
Примечание - Эти данные должны использоваться в сочетании с 8.11.4. Этот элемент данных не имеет отношения к событиям, которые достигают минимального уровня изменения продольной скорости (например, события чисто бокового столкновения).
8.11.8 Время записи максимального изменения результирующей скорости
Интервал времени от нулевого времени до момента, в который обнаружено максимальное изменение результирующей скорости, записанное БУРС или рассчитанное во время сканирования данных (см. таблицу 30).
Таблица 30 - Время записи максимального изменения результирующей скорости рассматриваемого транспортного средства
Единица измерения | мс |
Минимальный шаг | 2,5 |
Минимальный диапазон | От 0 до 300 или от 0 до окончания события столкновения плюс 30 в зависимости от того, что меньше |
Минимальная погрешность | ±3 |
Опорная точка отсчета | Нулевое время |
Тип элемента данных | II |
Примечание - Эти данные должны использоваться в сочетании с 8.11.5.
8.12 Информация электронного блока управления
8.12.1 Номер электронного(ых) блока(ов) управления по каталогу
Номер ЭБУ по каталогу производителя РТС (см. таблицу 31).
Таблица 31 - Номер электронного(ых) блока(ов) управления
Единица измерения | Неприменимо |
Минимальный шаг | Неприменимо |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | Время сканирования |
Тип элемента данных | II |
Примечание - На РТС может быть установлено более одного ЭБУ.
8.12.2 Версия(и) аппаратных средств электронного(ых) блока(ов) управления
Версия(и) аппаратных средств ЭБУ в соответствии с их технической документацией (см. таблицу 32).
Таблица 32 - Версия аппаратных средств электронного(ых) блока(ов) управления
Единица измерения | Неприменимо |
Минимальный шаг | Неприменимо |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | Время сканирования |
Тип элемента данных | II |
Примечание - На РТС может быть установлено более одного ЭБУ.
8.12.3 Версия программного обеспечения электронного(ых) блока(ов) управления
Версия ПО, установленного в ЭБУ (см. таблицу 33).
Таблица 33 - Версия программного обеспечения электронного блока управления
Единица измерения | Неприменимо |
Минимальный шаг | Неприменимо |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | Время сканирования |
Тип элемента данных | III |
Примечание - На РТС может быть установлено более одного ЭБУ. Один ЭБУ может содержать более одного ПО, имеющего собственный номер версии.
8.12.4 Применяемое напряжение электронного(ых) блока(ов) управления
Номинальное значение напряжения, использующееся в ЭБУ (см. таблицу 34).
Таблица 34 - Значение напряжения электронного блока управления
Единица измерения | В |
Минимальный шаг | 12 В или 24 В |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - На РТС может быть установлено более одного ЭБУ.
8.12.5 Ресурс электронного(ых) блока(ов) управления
8.12.5.1 Ресурс ЭБУ на момент события
Число минут работы ЭБУ на момент наступления события (см. таблицу 35).
Таблица 35 - Суммарный ресурс электронного блока управления на момент события
Единица измерения | Минута |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 5256000 |
Минимальная погрешность | ±10% от значения |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
Примечание - На РТС может быть установлено более одного ЭБУ.
8.12.5.2 Ресурс ЭБУ на момент сканирования
Число минут работы ЭБУ на момент сканирования (см. таблицу 36).
Таблица 36 - Суммарный ресурс электронного блока управления на момент сканирования
Единица измерения | Минута |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 5256000 |
Минимальная погрешность | ±10% от значения |
Опорная точка отсчета | Время сканирования |
Тип элемента данных | II |
Примечание - На РТС может быть установлено более одного ЭБУ.
8.12.6 Статус завершенности записи данных о событии
Статус того, насколько успешно записан и сохранен в ЭБУ полный набор статических данных и данных временных рядов, до 300 мс после нулевого времени (см. таблицу 37).
Таблица 37 - Статус завершенности записи данных о событии
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | Окончание записи |
Тип элемента данных | I |
8.13 Статус электронной системы стабилизации
Статус электронной системы стабилизации (см. таблицу 38).
Таблица 38 - Статус электронной системы стабилизации
Единица измерения | Неприменимо |
Минимальный шаг | Активно управляет движением РТС; сбой; неисправность; отключена; включена, но не управляет движением РТС |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | II |
| |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.14 Статус электронной системы "старт-стоп"
Статус электронной системы "старт-стоп" (см. таблицу 39).
Таблица 39 - Статус электронной системы "старт-стоп"
Единица измерения | Неприменимо |
Минимальный шаг | Старт, движение (электрическое и вспомогательное), остановка |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.15 Тип события
Отсутствие срабатывания показывает, что условия пробуждения алгоритма или пороговые значения были достигнуты, но ни одно устройство не было включено, в то время как срабатывание указывает, что был достигнут порог срабатывания (см. таблицу 40).
Таблица 40 - Тип события
Единица измерения | Несрабатывание/Срабатывание |
Минимальный шаг | Неприменимо |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | Окончание события |
Минимальная частота записей | Событие |
Тип элемента данных | II |
8.16 Статус переднего стеклоочистителя
Статус переднего стеклоочистителя (см. таблицу 41).
Таблица 41 - Статус переднего стеклоочистителя рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Слабый, интенсивный, выключен или автоматический |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Производитель РТС может выбрать, следует ли записывать статус выключателя переднего стеклоочистителя, статус работы переднего стеклоочистителя или оба.
8.17 Статус выключателя подушки безопасности переднего пассажира
Статус выключателя подушки безопасности переднего пассажира, показывающий, включена или выключена подушка безопасности переднего пассажира (см. таблицу 42).
Таблица 42 - Статус выключателя подушки безопасности переднего пассажира
Единица измерения | Неприменимо |
Минимальный шаг | Включен или выключен |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
Примечание - Этот элемент данных должен использоваться в сочетании с классификацией размеров пассажиров и элементом данных переднего пассажира, если РТС оборудовано автоматической системой отключения подушки безопасности.
8.18 Режим работы трансмиссии
Режим работы трансмиссии (см. таблицу 43).
Таблица 43 - Режим работы трансмиссии рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | В соответствии с режимами работы трансмиссии (распространенные режимы: "Паркинг", "Задний ход", "Нейтраль", "Передний ход" и т.д.) |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип элемента данных | II |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.19 Выбранный режим работы трансмиссии
Режим работы трансмиссии, выбранный водителем РТС (см. таблицу 44).
Таблица 44 - Режим работы трансмиссии, выбранный водителем рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | "Паркинг", "Задний ход", "Нейтраль", "Передний ход" или другие применимые режимы работы трансмиссии |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.20 Статус аварийной сигнализации
Статус сигналов аварийной сигнализации РТС (см. таблицу 45).
Таблица 45 - Статус сигналов аварийной сигнализации рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Включены или выключены |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.21 Статус системы головного освещения
Статус системы головного освещения РТС (см. таблицу 46).
Таблица 46 - Статус системы головного освещения рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | - Включены: габаритные огни, ближний свет, дальний свет, противотуманные фары, дневные ходовые огни; |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип элемента данных | III |
8.22 Число циклов включения зажигания
8.22.1 Число циклов включения зажигания на момент события
Число циклов включения зажигания, зарегистрированное ЭБУ, с момента первого использования данного(ых) ЭБУ до момента регистрации события (см. таблицу 47).
Примером цикла включения зажигания является случай, когда зажигание переключается из режима "Выключено/Вспомогательный" в режим "Включено", а не обязательно в режим запуска двигателя.
Таблица 47 - Число циклов включения зажигания рассматриваемого транспортного средства с момента первого использования электронного блока управления до момента события
Единица измерения | Цикл |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 60000 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | I |
8.22.2 Число циклов включения зажигания на момент сканирования
Число циклов включения зажигания, зарегистрированное ЭБУ, с момента первого использования данного(ых) ЭБУ до момента сканирования (см. таблицу 48).
Примером цикла включения зажигания является переключение зажигания из режима "Выключено/Вспомогательный" в режим "Включено", а не обязательно в режим запуска двигателя.
Таблица 48 - Число циклов включения зажигания рассматриваемого транспортного средства с момента первого использования электронного блока управления до момента сканирования
Единица измерения | Цикл |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 60000 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | Время сканирования |
Тип элемента данных | I |
8.22.3 Число включений кнопки зажигания
Число нажатий на кнопку включения зажигания на момент события (см. таблицу 49).
Таблица 49 - Число нажатий на кнопку включения зажигания рассматриваемого транспортного средства
Единица измерения | Нажатие |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 253 |
Минимальная погрешность | ±1 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
8.23 Статус индикаторов
8.23.1 Статус индикатора неисправности тормозной системы
Статус отображаемого водителю РТС сигнала предупреждения о неисправности тормозной системы (см. таблицу 50).
Таблица 50 - Статус индикатора предупреждения о неисправности тормозной системы
Единица измерения | Неприменимо |
Минимальный шаг | Включен или выключен |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
8.23.2 Статус индикатора, предупреждающего о неработоспособности системы защиты пассажиров или пешеходов
Статус индикатора на панели приборов РТС, предупреждающего водителя РТС о сбое или отказе систем защиты пассажиров или пешеходов (см. таблицу 51).
Таблица 51 - Статус индикатора, предупреждающего о неработоспособности системы защиты пассажиров или пешеходов
Единица измерения | Неприменимо |
Минимальный шаг | Включен или выключен |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | I |
Примечание - Один элемент данных может существовать как для записи о неработоспособности обеих систем защиты, так и для каждой из систем в отдельности; также разные элементы данных могут быть созданы для записей соответственно о сбое или отказе.
8.23.3 Общее время работы индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов
Общее количество времени, в течение которого был включен на панели приборов индикатор, предупреждающий о сбое или отказе систем защиты пассажиров или пешеходов (см. таблицу 52).
Таблица 52 - Общее время работы индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов
Единица измерения | Минута |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 5000000 |
Минимальная погрешность | ±10% от значения |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Один элемент данных может существовать для предупреждений о неработоспособности обеих систем защиты или для каждой из систем в отдельности; также разные элементы данных могут быть созданы для записей соответственно о сбое или отказе.
8.23.4 Число циклов включения индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов
Количество циклов включения на панели приборов индикатора, предупреждающего о неработоспособности систем защиты пассажиров/пешеходов (см. таблицу 53).
Таблица 53 - Число циклов включения индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов
Единица измерения | Цикл |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 60000 |
Минимальная погрешность | ±1 до нулевого времени |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
Примечание - Один элемент данных может существовать для предупреждений обеих систем защиты или каждой из систем в отдельности; также разные элементы данных могут быть созданы для записей соответственно о сбое и отказе.
8.23.5 Статус индикатора отключенного состояния подушки безопасности переднего пассажира
Статус индикатора отключенного состояния подушки безопасности переднего пассажира (см. таблицу 54).
Таблица 54 - Статус индикатора отключенного состояния подушки безопасности переднего пассажира
Единица измерения | Неприменимо |
Минимальный шаг | Включен (подушка безопасности выключена) или выключен (подушка безопасности включена) |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
8.23.6 Статус индикатора неисправности модуля управления силовым агрегатом
Статус индикатора неисправности модуля управления силовым агрегатом, указывающего, что код(ы) неисправности активен(ны) либо сохранен(ны) в модуле управления силовым агрегатом (см. таблицу 55).
Таблица 55 - Статус индикатора неисправности модуля управления силовым агрегатом
Единица измерения | Неприменимо |
Минимальный шаг | Включен или выключен |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
8.23.7 Статус индикатора предупреждения системы контроля давления в шинах
Статус индикатора на панели приборов, который предупреждает водителя РТС об обнаружении системой контроля давления в шинах снижения давления в одной или нескольких шинах РТС (см. таблицу 56).
Таблица 56 - Статус индикатора предупреждения системы контроля давления в шинах
Единица измерения | Неприменимо |
Минимальный шаг | Включен или выключен |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
8.24 Статус системы удержания рассматриваемого транспортного средства в занимаемой полосе движения
Статус системы удержания РТС в занимаемой полосе движения в соответствии с ГОСТ Р 58804 (см. таблицу 57).
Таблица 57 - Статус системы удержания транспортного средства в занимаемой полосе движения
Единица измерения | Неприменимо |
Минимальный шаг | Включена, выключена, сбой, неисправность, предупреждение или вмешательство водителя |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.25 Широта
Широта расположения РТС в начале события (см. таблицу 58).
Таблица 58 - Широта расположения рассматриваемого транспортного средства в начале события
Единица измерения | Градус |
Минимальный шаг | 0,0001 |
Минимальный диапазон | От минус 90,0000 до 90,0000 |
Минимальная погрешность | ±0,0001 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
8.26 Долгота
Долгота расположения РТС в начале события (см. таблицу 59).
Таблица 59 - Долгота расположения рассматриваемого транспортного средства в начале события
Единица измерения | Градус |
Минимальный шаг | 0,0001 |
Минимальный диапазон | От минус 180,0000 до 180,0000 |
Минимальная погрешность | ±0,0001 |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
8.27 Абсолютное давление во впускном коллекторе (только для рассматриваемого транспортного средства с двигателем внутреннего сгорания)
Среднее абсолютное статическое давление газа во впускном коллекторе двигателя РТС (см. таблицу 60).
Таблица 60 - Среднее абсолютное статическое давление газа во впускном коллекторе
Единица измерения | кПа |
Минимальный шаг | 1 |
Минимальный диапазон | От минус 101 до 101 |
Минимальная погрешность | ±10% от полного диапазона |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип элемента данных | II |
Примечание 1 - В случаях с несколькими коллекторами двигателя производителю РТС может потребоваться элемент данных "MAP X" для сбора значений от других коллекторов двигателя.
Примечание 2 - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.28 Массовый расход воздуха (только для транспортных средств с двигателями внутреннего сгорания)
Измерения потока воздуха, поступающего в корпус дроссельной заслонки (см. таблицу 61).
Таблица 61 - Значения массового расхода воздуха
Единица измерения | г/с |
Минимальный шаг | 2,5 |
Минимальный диапазон | От 0 до 630 |
Минимальная погрешность | ±10% от максимального значения |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип | II |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.29 Минуты работы до события
Общее количество минут, в течение которых зажигание находилось в режиме "Включено/запуск" для текущего цикла зажигания (см. таблицу 62).
Таблица 62 - Минуты работы до события
Единица измерения | Минута |
Минимальный шаг | 1 |
Минимальный диапазон | от 0 до 60000 |
Минимальная погрешность | ±10% от значения |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Частота записей | 2 записи в секунду |
Тип элемента данных | III |
8.30 Одновременные события
8.30.1 Одновременные события, число событий
Появление двух событий с интервалом не более 5 с (см. таблицу 63).
Таблица 63 - Одновременные события
Единица измерения | Неприменимо |
Минимальный шаг | 1 |
Минимальный диапазон | 2 |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | Нулевое время |
Тип элемента данных | I |
8.30.2 Время от события Х до события Y
Время, прошедшее от начала события Х до начала события Y, если два события появились с интервалом не более 5 с (см. таблицу 64).
Таблица 64 - Время от события X до события Y
Единица измерения | с |
Минимальный шаг | 0,1 |
Минимальный диапазон | От 0 до 5,0 |
Минимальная погрешность | ±0,1 |
Опорная точка отсчета | Нулевое время |
Тип элемента данных | I |
8.31 Информация о классификации пассажиров и водителя
8.31.1 Информация о классификации водителя
Классификация водителя по росту крупнее 5%-ного перцентиля (женщины) (см. таблицу 65).
Таблица 65 - Классификация водителя по росту, крупнее 5%-ного перцентиля (женщины)
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
Примечание - Классификация водителя по росту может осуществляться на основании данных о положении его сиденья.
8.31.2 Информация о классификации переднего пассажира
Классификация переднего пассажира по росту меньше 5%-ного перцентиля (женщины) (см. таблицу 66).
Примечание - Данный перцентиль эквивалентен идентификации переднего пассажира как ребенка.
Таблица 66 - Классификация переднего пассажира по росту меньше 5%-ного перцентиля (женщины)
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
Примечание - Классификация переднего пассажира по росту может осуществляться на основании данных о положении его сиденья.
8.32 Информация о срабатывании устройств защиты пассажиров/пешеходов
8.32.1 Статус систем защиты пассажиров/пешеходов
Статус каждого устройства защиты пассажиров или пешеходов. Каждая система защиты пассажиров и пешеходов РТС должна сообщать о своем статусе независимо от других систем защиты (см. таблицу 67).
Таблица 67 - Статус систем защиты пассажиров/пешеходов
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От нулевого времени до |
Тип элемента данных | II |
Примечание - Для устройств защиты пассажиров эти данные должны быть сообщены в совокупности с данными о расположении сидений (см. таблицу 68) или сообщены в определенном порядке. Также эти данные должны использоваться в сочетании с 8.32.2 для регистрации времени срабатывания данных устройств защиты пассажиров/пешеходов.
В таблице 68, в соответствии с требованиями [3], приведен пример нумерации сидений для их идентификации в информационной шине ТС. Приведенные данные должны использоваться для установления соответствия следующих параметров конкретному месту для сидения: состояние ремня безопасности, переключатель продольной регулировки сиденья в состоянии переднего положения, состояние активации устройства защиты пассажиров и время активации устройства защиты пассажиров.
Таблица 68 - Кодировка расположения сидений в рассматриваемом транспортном средстве
Код сигнала | Расположение сиденья |
11 | Левое сиденье переднего ряда |
12 | Центральное сиденье переднего ряда |
13 | Правое сиденье переднего ряда |
21 | Левое сиденье второго ряда |
22 | Центральное сиденье второго ряда |
23 | Правое сиденье второго ряда |
31 | Левое сиденье третьего ряда |
32 | Центральное сиденье третьего ряда |
33 | Правое сиденье третьего ряда |
8.32.2 Время срабатывания устройства защиты пассажиров/пешеходов
Время, прошедшее с начала события (нулевого времени) до подачи команды на срабатывание (см. таблицу 69).
Таблица 69 - Время срабатывания устройства защиты пассажиров/пешеходов
Единица измерения | мс |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 250 |
Минимальная погрешность | ±2 |
Опорная точка отсчета | Нулевое время |
Тип элемента данных | I (для передних подушек безопасности водителя и пассажира, только для первой стадии раскрытия). |
Примечание - Для устройств защиты пассажиров эти данные должны быть сообщены в совокупности с данными о расположении сидений (см. таблицу 68) или сообщены в определенном порядке. Также эти данные должны использоваться в сочетании с 8.32.1 (индикация статуса данных устройств защиты пассажиров/пешеходов).
8.33 Значение давления в системе защиты пассажиров
Этот параметр отражает значение, зарегистрированное датчиком давления, преобразованное в мбар. При наличии нескольких датчиков этот параметр относится к датчикам с числом от 1 до "n" (см. таблицу 70).
Таблица 70 - Значение датчика давления в системе защиты пассажиров
Единица измерения | мбар |
Минимальный шаг | 1 |
Минимальный диапазон | От минус 10,0 до 50 мбар |
Минимальная погрешность | ±10 в пределах диапазона физического датчика |
Минимальный интервал записи | От 0 до 50 мс относительно нулевого времени |
Минимальная частота записей | 250 записей в секунду |
Тип элемента данных | III |
8.34 Отношение изменения давления в системе защиты пассажиров
Этот параметр представляет собой отношение изменения давления в системе защиты пассажиров к давлению в состоянии покоя (см. таблицу 71).
Таблица 71 - Значение отношения изменения давления в системе защиты пассажиров
Единица измерения |
|
Минимальный шаг | 1 |
Минимальный диапазон | 100 |
Минимальная погрешность | ±10 в пределах диапазона физического датчика |
Минимальный интервал записи | От 0 до 50 мс относительно нулевого времени |
Минимальная частота записей | 250 записей в секунду |
Тип элемента данных | III |
8.35 Статус стояночного тормоза
Статус стояночного тормоза (см. таблицу 72).
Таблица 72 - Статус стояночного тормоза рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Включен или выключен |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.36 Статус работы системы частичной автоматизации управления (для систем автоматизации управления уровня 2)
Статус работы системы частичной автоматизации управления по ГОСТ Р 58823 (см. таблицу 73).
________________
Здесь и далее уровни автоматизации управления соответствуют указанному стандарту.
Таблица 73 - Статус работы системы частичной автоматизации управления
Единица измерения | Неприменимо |
Минимальный шаг | "Off" - не управляет РТС, "On" - управляет РТС, сбой, неисправность, запрос на вмешательство |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.37 Значение крутящего момента на выходном валу двигателя
Значение крутящего момента на выходном валу двигателя (см. таблицу 74).
Таблица 74 - Значение крутящего момента на выходном валу двигателя
Единица измерения | Нм |
Минимальный шаг | 10 |
Минимальный диапазон | От 0 до 2000 |
Минимальная погрешность | 10% |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.38 Угол вращения
8.38.1 Угол крена
Угол РТС относительно его оси Х (см. рисунок 1) в сравнении с начальным положением РТС, перед событием и в момент события (см. таблицу 75).
Таблица 75 - Значение угла крена рассматриваемого транспортного средства
Единица измерения | Градус |
Минимальный шаг | 10 |
Минимальный диапазон | От минус 1080 до 1080 |
Минимальная погрешность | ±10% от полного диапазона датчика |
Минимальный интервал записи | От минус 1 с до |
Минимальная частота записей | 10 записей в секунду |
Тип элемента данных | II |
Если они регистрировались, предполагается, что будет записан и сообщен "угол крена" либо "скорость крена" (см. 8.39.1), но не оба значения.
Примечание - Из-за возможности насыщения датчика во время определенных событий эти данные могут быть недоступны после принятия решения о срабатывании.
8.38.2 Угол наклона в поперечном направлении
Угол РТС относительно его оси Z (см. рисунок 1) в сравнении с начальным положением РТС перед событием (см. таблицу 76).
Таблица 76 - Значение угла наклона рассматриваемого транспортного средства в поперечном направлении
Единица измерения | Градус |
Минимальный шаг | 10 |
Минимальный диапазон | От минус 1080 до 1080 |
Минимальная погрешность | ±10% от полного диапазона датчика |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Если они регистрировались, предполагается, что будет записан и сообщен "угол наклона" либо "скорость наклона" (см. 8.39.2), но не оба значения.
Примечание 1 - Из-за возможности насыщения датчика во время определенных событий эти данные могут быть недоступны после принятия решения о срабатывании.
Примечание 2 - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.39 Угловая скорость вращения
8.39.1 Скорость крена
Скорость изменения угла РТС относительно его оси X (см. рисунок 1) до и во время события (см. таблицу 77).
Таблица 77 - Значение скорости изменения угла рассматриваемого транспортного средства относительно оси X
Единица измерения | Градус в секунду |
Минимальный шаг | 1 |
Минимальный диапазон | От минус 240 до 240 |
Минимальная погрешность | ±10% от полного диапазона датчика |
Минимальный интервал записи | От минус 1 с до |
Минимальная частота записей | 10 записей в секунду |
Тип элемента данных | II |
Если они регистрировались, предполагается, что будет записана и сообщена "скорость крена" либо "угол крена" (см. 8.38.1), но не оба значения.
Примечание - Из-за возможности насыщения датчика во время определенных событий эти данные могут быть недоступны после принятия решения о срабатывании.
8.39.2 Скорость наклона
Скорость изменения угла РТС относительно его оси Z (см. рисунок 1) перед событием (см. таблицу 78).
Таблица 78 - Значение скорости изменения угла рассматриваемого транспортного средства относительно оси Z
Единица измерения | Градус в секунду |
Минимальный шаг | 0,1 |
Минимальный диапазон | От минус 75 до 75 |
Минимальная погрешность | ±10% от полного диапазона датчика |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | II |
Если они регистрировались, предполагается, что будет записана и сообщена "скорость наклона" либо "угол наклона" (см. 8.38.2), но не оба значения.
Примечание 1 - Из-за возможности насыщения датчика во время определенных событий эти данные могут быть недоступны после принятия решения о срабатывании.
Примечание 2 - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.40 Число оборотов в минуту (см. таблицу 79)
а) Для ТС, оснащенных только ДВС, число оборотов в минуту коленчатого вала двигателя РТС;
б) для ТС, оснащенных не только ДВС либо другими типами двигателей, число оборотов в минуту вала двигателя в точке, в которой он входит в коробку передач трансмиссии РТС.
Примечание - В случае ТС с несколькими (n) источниками энергии производителю РТС могут потребоваться элементы данных "RPM 2" "RPM n" для регистрации значения числа оборотов второго и последующих источников энергии.
Таблица 79 - Число оборотов двигателя рассматриваемого транспортного средства
Единица измерения | мин |
Минимальный шаг | 100 |
Минимальный диапазон | От 0 до 10000 |
Минимальная погрешность | ±100 |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | I |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.41 Статус застежки ремня безопасности
Состояние застежки ремня безопасности (см. таблицу 80).
Таблица 80 - Состояние застежки ремня безопасности
Единица измерения | Неприменимо |
Минимальный шаг | Застегнута или расстегнута |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | I (для водителя), II (для пассажирских мест РТС) |
Примечание 1 - Эти данные должны быть сообщены в совокупности с данными о расположении сидений (см. таблицу 68) или сообщены в определенном порядке.
Примечание 2 - Эти данные отражают только состояние застежек ремня безопасности. Они не отражают ни наличие пассажиров на данном сиденье, ни находится ли ремень безопасности позади или впереди пассажира/водителя.
8.42 Статус переключателя в направляющей сиденья
Статус переключателя, установленного в направляющей сиденья, определяющий, находится оно в положении, сдвинутом вперед относительно определенной точки, или нет (см. таблицу 81).
Таблица 81 - Статус переключателя в направляющей сиденья
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
Примечание 1 - Эти данные должны быть сообщены в совокупности с данными о расположении сидений (см. таблицу 68) или сообщены в определенном порядке.
Примечание 2 - Данный элемент данных регистрируется при наличии датчика в РТС.
8.43 Момент превышения расчетного диапазона датчика, ХХ
Отображает точку времени, в которой датчик впервые достиг максимального значения диапазона, на который он рассчитан (см. таблицу 82).
Таблица 82 - Время превышения расчетного диапазона датчика
Единица измерения | мс |
Минимальный шаг | Совпадает с шагом датчика, ХХ |
Минимальный диапазон | В течение записанного периода соответствующего датчика, ХХ |
Минимальная погрешность | Двойное разрешение соответствующего датчика, ХХ |
Опорная точка отсчета | Нулевое время |
Тип элемента данных | III |
Примечание - ХХ является элементом данных, для которого указывается время насыщения (например, продольное ускорение, поперечное ускорение). Элемент данных "Момент превышения расчетного диапазона датчика, ХХ" применим к любому датчику, данные которого превышают его расчетный диапазон измерений. Этот параметр может не понадобиться для конкретного элемента данных, если время, в которое соответствующий датчик превысил свой расчетный диапазон, можно восстановить из анализа данных, сохраненных для этого элемента данных.
8.44 Отображаемая скорость рассматриваемого транспортного средства
Скорость РТС относительно опорной поверхности, отображаемая соответствующей бортовой подсистемой РТС, предназначенной для отображения скорости РТС, во время движения РТС (см. таблицу 83).
Таблица 83 - Скорость рассматриваемого транспортного средства
Единица измерения | км/ч |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 200 |
Минимальная погрешность | ±1 км/ч |
Минимальный интервал записи | От минус 5 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | I |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.45 Угол поворота рулевого колеса
Угловое положение рулевого колеса, в котором нулевое значение (0 градусов) соответствует его нейтральному положению (то есть прямому направлению колес РТС). Положительное значение указывает, что рулевое колесо повернуто по часовой стрелке (см. таблицу 84).
Таблица 84 - Угол поворота рулевого колеса рассматриваемого транспортного средства
Единица измерения | Градус |
Минимальный шаг | 5 |
Минимальный диапазон | От минус 250 (против часовой стрелки) до 250 (по часовой стрелке) |
Минимальная погрешность | ±5% от измеренного значения |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | II |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.46 Таймер синхронизации перед событием
Таймер синхронизации перед событием (см. таблицу 85).
Таблица 85 - Время, прошедшее с последней записи о событии до нулевого времени
Единица измерения | мс |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 499 |
Минимальная погрешность | ±2 |
Минимальный интервал записи | Нулевое время |
Тип элемента данных | III |
8.47 Положение дроссельной заслонки
8.47.1 Относительное положение дроссельной заслонки двигателя (только для двигателей внутреннего сгорания)
Процентное соотношение открытия дроссельной заслонки двигателя (см. таблицу 86).
Таблица 86 - Процентное соотношение открытия дроссельной заслонки двигателя
Единица измерения | % |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 100 |
Минимальная погрешность | ±5 |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | I |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.47.2 Относительное положение педали управления двигателем
Относительное положение педали управления двигателем в сравнении с полностью нажатым положением, основанное на действии водителя (см. таблицу 87).
Таблица 87 - Относительное положение педали управления двигателем
Единица измерения | % |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 100 |
Минимальная погрешность | ±5 |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | I |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.48 Статус электронной системы контроля тяги
Статус работы электронной системы контроля тяги (см. таблицу 88).
Таблица 88 - Статус электронной системы контроля тяги
Единица измерения | Неприменимо |
Минимальный шаг | Управляет тягой; сбой; неисправность; подан сигнал на отключение; включена, но не управляет тягой |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | II |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.49 Статус индикаторов указателей поворота
Статус индикаторов указателей поворота (см. таблицу 89).
Таблица 89 - Статус индикаторов указателей поворота
Единица измерения | Неприменимо |
Минимальный шаг | Нейтральное, левое, правое |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | III |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
8.50 Идентификационный номер рассматриваемого транспортного средства
Идентификационный номер РТС (VIN), присвоенный РТС заводом-производителем (см. таблицу 90).
Таблица 90 - Идентификационный номер рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | Неприменимо |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | II |
8.51 Пробег рассматриваемого транспортного средства
Пробег РТС на начало события (см. таблицу 91).
Таблица 91 - Пробег рассматриваемого транспортного средства на начало события
Единица измерения | км |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 500000 |
Минимальная погрешность | 1 |
Минимальный интервал записи | От минус 1,1 до 0 с относительно нулевого времени |
Тип элемента данных | III |
9 Параметры, записываемые бортовыми устройствами регистрации событий, и элементы данных, относящиеся к системам защиты пешеходов
9.1 В данном разделе устанавливаются параметры РТС и системы защиты пешеходов, подлежащие записи и сохранению в БУРС, в соответствии с областью применения настоящего стандарта. Параметры являются значениями технических величин в определенном временном диапазоне, которые применяют при анализе работы системы защиты пешеходов и при реконструкции ДТП с участием пешеходов.
9.2 Заблокированные и разблокированные события
В системе защиты пешеходов используется несколько устройств, которые делятся на восстанавливающиеся или невосстанавливающиеся. Из-за особенностей работы системы защиты пешеходов связанные с ее работой события не должны блокироваться. События, которые не приводят к управляемому срабатыванию восстанавливающегося или невосстанавливающегося защитного устройства, могут быть записаны. Система должна быть способна записывать хотя бы одно событие, относящееся к работе системы защиты пешеходов.
9.3 Элементы данных, относящиеся к системам защиты пешеходов
9.3.1 Данные об ускорении (см. 8.1).
9.3.1.1 Поперечное ускорение (см. 8.1.1).
9.3.1.2 Продольное ускорение (см. 8.1.2).
9.3.2 Дата ДТП (см. 8.2).
9.3.2.1 Дата ДТП - Год (см. 8.2.1).
9.3.2.2 Дата ДТП - Месяц (см. 8.2.2).
9.3.2.3 Дата ДТП - День (см. 8.2.3).
9.3.3 Время ДТП (см. 8.3).
9.3.3.1 Время ДТП - Час (см. 8.3.1).
9.3.3.2 Время ДТП - Минута (см. 8.3.2).
9.3.3.3 Время ДТП - Секунда (см. 8.3.3).
9.3.4 Статус системы адаптивного круиз-контроля (для систем автоматизации управления уровня 1) (см. 8.4).
9.3.5 Температура окружающего воздуха (см. 8.5).
9.3.6 Статус антиблокировочной системы РТС (см. 8.6).
9.3.7 Статус системы контроля слепых зон РТС (см. 8.7).
9.3.8 Статус тормозной системы РТС (см. 8.8).
9.3.9 Положение педали тормоза (см. 8.8.2).
9.3.10 Давление в тормозной системе (см. 8.8.3).
9.3.11 Запрос на торможение (см. 8.8.4).
9.3.12 Рабочая тормозная система, включена или выключена (см. 8.8.5).
9.3.13 Статус системы предупреждения о столкновениях (см. 8.9).
9.3.14 Статус системы круиз-контроля (см. 8.10).
9.3.15 Информация ЭБУ (см. 8.12).
9.3.16 Номер ЭБУ по каталогу (см. 8.12.1).
9.3.17 Версия аппаратных средств ЭБУ (см. 8.12.2).
9.3.18 Версия ПО ЭБУ (см. 8.12.3).
9.3.19 Применяемое напряжение ЭБУ (см. 8.12.4).
9.3.20 Ресурс ЭБУ (см. 8.12.5).
9.3.20.1 Ресурс ЭБУ на момент события (см. 8.12.5.1).
9.3.20.2 Ресурс ЭБУ на момент сканирования (см. 8.12.5.2).
9.3.21 Статус завершенности записи данных о событии (см. 8.12.6).
9.3.22 Статус электронной системы контроля тяги (см. 8.48).
9.3.23 Статус электронной системы "старт-стоп" (см. 8.14).
9.3.24 Тип события (см. 8.15).
9.3.25 Статус переднего стеклоочистителя (см. 8.16).
9.3.26 Режим работы трансмиссии (см. 8.18).
9.3.27 Выбранный режим работы трансмиссии (см. 8.19).
9.3.28 Статус аварийной сигнализации (см. 8.20).
9.3.29 Статус системы головного освещения (см. 8.21).
9.3.30 Число циклов включения зажигания (см. 8.22).
9.3.30.1 Число циклов включения зажигания на момент события (см. 8.22.1).
9.3.30.2 Число циклов включения зажигания на момент сканирования (см. 8.22.2).
9.3.30.3 Число включений кнопки зажигания (см. 8.22.3).
9.3.31 Статус индикаторов (см. 8.23).
9.3.31.1 Статус индикатора неисправности тормозной системы (см. 8.23.1).
9.3.31.2 Статус индикатора, предупреждающего о неработоспособности системы защиты пассажиров или пешеходов (см. 8.23.2).
9.3.31.3 Общее время работы индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов (см. 8.23.3).
9.3.31.4 Число циклов включения индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов (см. 8.23.4).
9.3.31.5 Статус индикатора неисправности модуля управления силовым агрегатом (см. 8.23.6).
9.3.31.6 Статус индикатора предупреждения системы контроля давления в шинах (см. 8.23.7).
9.3.32 Статус системы удержания РТС в занимаемой полосе движения (см. 8.24).
9.3.33 Широта (см. 8.25).
9.3.34 Долгота (см. 8.26).
9.3.35 Абсолютное давление во впускном коллекторе (см. 8.27).
9.3.36 Массовый расход воздуха (см. 8.28).
9.3.37 Минуты работы до события (см. 8.29).
9.3.38 Информация о срабатывании устройств защиты пассажиров/пешеходов (см. 8.32).
9.3.38.1 Статус систем защиты пассажиров/пешеходов (см. 8.32.1).
9.3.38.2 Время срабатывания устройства защиты пассажиров/пешеходов (см. 8.32.2).
9.3.39 Статус стояночного тормоза (см. 8.35).
9.3.40 Данные датчика системы защиты пешеходов
9.3.40.1 Ускорение при работе системы защиты пешеходов
Вектор ускорения точки РТС (см. таблицу 92).
Таблица 92 - Вектор ускорения точки рассматриваемого транспортного средства
Обозначение | G |
Минимальный шаг | 0,5 |
Минимальный диапазон | От минус 50 до 50 |
Минимальная погрешность | ±5% от полного диапазона физического датчика |
Минимальный интервал записи | От 0 до 250 мс относительно нулевого времени |
Минимальная частота записей | 500 записей в секунду |
Тип элемента данных | III |
Примечание - Из-за возможного насыщения акселерометра во время определенных событий этот элемент данных может не подходить для использования при реконструкции события. Однако он может быть полезен для других целей, таких как реконструкция решения о срабатывании.
9.3.40.2 Продольное ускорение при работе системы защиты пешеходов
Продольным ускорением называют компонент "X" вектора ускорения точки РТС. Продольное ускорение считают положительным при направлении его в направлении движения РТС. При наличии нескольких датчиков этот параметр относится к датчикам с числом от 1 до "n" (см. таблицу 93).
Таблица 93 - Продольный компонент вектора ускорения точки рассматриваемого транспортного средства
Обозначение | GX |
Минимальный шаг | 1,0 |
Минимальный диапазон | От минус 50 до 50 |
Минимальная погрешность | ±5% от полного диапазона физического датчика |
Минимальный интервал записи | От 0 до +25,0 мс относительно нулевого времени |
Минимальная частота записей | 250 записей в секунду |
Тип элемента данных | II |
9.3.40.3 Значение давления в системе защиты пешеходов
Этот параметр отражает значение, зарегистрированное датчиком давления, преобразованное в мбар. При наличии нескольких датчиков этот параметр относится к датчикам с числом от 1 до "n" (см. таблицу 94).
Таблица 94 - Значение датчика давления в системе защиты пешеходов
Единица измерения | мбар |
Минимальный шаг | 1 |
Минимальный диапазон | От минус 50 до 150 |
Минимальная погрешность | ±10% от полного диапазона физического датчика |
Минимальный интервал записи | От 0 до 25 мс относительно нулевого времени |
Минимальная частота записей | 250 записей в секунду |
Тип элемента данных | II |
9.3.40.4 Отношение изменения давления в системе защиты пешеходов
Этот параметр представляет собой отношение изменения давления в системе защиты пешеходов к давлению в состоянии покоя (см. таблицу 95).
Таблица 95 - Значение отношения изменения давления в системе защиты пешеходов
Единица измерения |
|
Минимальный шаг | 1 |
Минимальный диапазон | 100 |
Минимальная погрешность | ±10 в пределах диапазона физического датчика |
Минимальный интервал записи | От 0 до 25 мс относительно нулевого времени |
Минимальная частота записей | 250 записей в секунду |
Тип элемента данных | II |
9.3.41 Выполнение критерия срабатывания системы защиты пешеходов
Отображает достижение порога срабатывания (см. таблицу 96).
Таблица 96 - Выполнение критерия срабатывания системы защиты пешеходов
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От 0 до |
Минимальная частота записей | Событие |
Тип элемента данных | III |
9.3.42 Статус события несрабатывания системы защиты пешеходов
Пороговый триггер (пробуждающийся алгоритм или удовлетворение порога срабатывания) достигнут, но ни одно защитное устройство не сработало (см. таблицу 97).
Таблица 97 - Выполнение критерия срабатывания системы защиты пешеходов
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От 0 до |
Минимальная частота записей | Событие |
Тип элемента данных | III |
9.3.43 Статус завершенности записи события по защите пешеходов
Статус того, был ли полный набор статических данных и данных временных рядов успешно записан и сохранен в ЭБУ (см. таблицу 98).
Таблица 98 - Статус завершенности записи события по защите пешеходов
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | Последующие элементы данных |
Тип элемента данных | II |
9.3.44 Время на первое срабатывание системы защиты пешеходов
Время, прошедшее с нулевого времени (основанного на контакте) события по защите пешеходов до времени подачи команды на первое срабатывание защитного устройства (см. таблицу 99).
Таблица 99 - Время на первое срабатывание системы защиты пешеходов
Единица измерения | мс |
Минимальный шаг | 1,0 |
Минимальный диапазон | От 0 до 100 или от 0 до времени окончания контакта +10 в зависимости от того, что меньше |
Минимальная погрешность | ±2,0 |
Опорная точка отсчета | От минус 1,0 до 0,1 с относительно нулевого времени |
Тип элемента данных | II |
9.3.45 Время на N-е срабатывание устройств защиты пешеходов
Время, прошедшее с начала события (нулевого времени) по защите пешеходов до времени подачи команды на N-е срабатывание защитного устройства. Данный параметр может отражать дополнительные ступени срабатывания того же устройства, так и срабатывание других защитных устройств (см. таблицу 100).
Таблица 100 - Время на N-е срабатывание устройств защиты пешеходов
Единица измерения | мс |
Минимальный шаг | 1,0 |
Минимальный диапазон | От 0 до 100 или от 0 до времени окончания контакта +10 в зависимости от того, что меньше |
Минимальная погрешность | ±2,0 |
Минимальный интервал записи | От минус 1,0 до 0,1 с относительно нулевого времени |
Тип элемента данных | II |
9.3.46 Значение крутящего момента на выходном валу двигателя (см. 8.37).
9.3.47 Число оборотов в минуту (см. 8.40).
9.3.48 Момент превышения расчетного диапазона датчика, ХХ (см. 8.43).
9.3.49 Отображаемая скорость РТС (см. 8.44).
9.3.50 Угол поворота рулевого колеса (см. 8.45).
9.3.51 Таймер синхронизации перед событием (см. 8.46).
9.3.52 Положение дроссельной заслонки (см. 8.47).
9.3.52.1 Относительное положение дроссельной заслонки двигателя (см. 8.47.1).
9.3.52.2 Относительное положение педали управления двигателем (см. 8.47.2).
9.3.53 Статус индикаторов указателей поворота (см. 8.49).
9.3.54 Идентификационный номер РТС (см. 8.50).
9.3.55 Пробег РТС (см. 8.51).
10 Параметры, записываемые бортовыми устройствами регистрации событий, и элементы данных, относящиеся к системам защиты пассажиров и водителя при опрокидывании
10.1 В данном разделе устанавливаются элементы данных, отражающие параметры опрокидывания РТС и относящиеся к работе системы защиты пассажиров и водителя, в соответствии с областью применения настоящего стандарта. Параметры являются значениями технических величин в определенном временном диапазоне, которые применяют при анализе работы системы защиты пассажиров и водителя при опрокидывании РТС и при реконструкции ДТП, связанных с опрокидыванием.
10.2 Множественные и параллельные события
События опрокидывания могут быть сохранены в числе событий фронтального/бокового/заднего столкновений или в виде независимого параллельного события, создающего событие с несколькими записями. Система должна быть способна записывать как минимум одно событие опрокидывания.
10.3 Элементы данных, относящиеся к работе системы защиты пассажиров и водителя
10.3.1 Данные об ускорении (см. 8.1).
10.3.1.1 Поперечное ускорение (см. 8.1.1).
10.3.1.2 Продольное ускорение (см. 8.1.2).
10.3.1.3 Нормальное ускорение (см .8.1.3).
10.3.2 Дата ДТП (см. 8.2).
10.3.2.1 Дата ДТП - Год (см. 8.2.1).
10.3.2.2 Дата ДТП - Месяц (см. 8.2.2).
10.3.2.3 Дата ДТП - День (см. 8.2.3).
10.3.3 Время ДТП (см. 8.3).
10.3.3.1 Время ДТП - Час (см. 8.3.1).
10.3.3.2 Время ДТП - Минута (см. 8.3.2).
10.3.3.3 Время ДТП - Секунда (см. 8.3.3).
10.3.4 Статус системы адаптивного круиз-контроля (для систем автоматизации управления уровня 1) (см. 8.4).
10.3.5 Температура окружающего воздуха (см. 8.5).
10.3.6 Статус антиблокировочной системы РТС (см. 8.6).
10.3.7 Статус системы контроля слепых зон РТС (см. 8.7).
10.3.8 Статус тормозной системы РТС (см. 8.8).
10.3.9 Положение педали тормоза (см. 8.8.2).
10.3.10 Давление в тормозной системе (см. 8.8.3).
10.3.11 Запрос на торможение (см. 8.8.4).
10.3.12 Рабочая тормозная система, включена или выключена (см. 8.8.5).
10.3.13 Статус системы предупреждения о столкновениях (см. 8.9).
10.3.14 Статус системы круиз-контроля (см. 8.10).
10.3.15 Информация ЭБУ (см. 8.12).
10.3.16 Номер ЭБУ по каталогу (см. 8.12.1).
10.3.17 Версия аппаратных средств ЭБУ (см. 8.12.2).
10.3.18 Версия ПО ЭБУ (см. 8.12.3).
10.3.19 Применяемое напряжение ЭБУ (см. 8.12.4).
10.3.20 Ресурс ЭБУ (см. 8.12.5).
10.3.20.1 Ресурс ЭБУ на момент события (см. 8.12.5.1).
10.3.20.2 Ресурс ЭБУ на момент сканирования (см. 8.12.5.2).
10.3.21 Статус завершенности записи данных о событии (см. 8.12.6).
10.3.22 Статус электронной системы стабилизации (см. 8.13).
10.3.23 Статус электронной системы "старт-стоп" (см. 8.14).
10.3.24 Тип события (см. 8.15).
10.3.25 Статус переднего стеклоочистителя (см. 8.16).
10.3.26 Режим работы трансмиссии (см. 8.18).
10.3.27 Выбранный режим работы трансмиссии (см. 8.19).
10.3.28 Статус аварийной сигнализации (см. 8.20).
10.3.29 Статус системы головного освещения (см. 8.21).
10.3.30 Число циклов включения зажигания (см. 8.22).
10.3.30.1 Число циклов включения зажигания на момент события (см. 8.22.1).
10.3.30.2 Число циклов включения зажигания на момент сканирования (см. 8.22.2).
10.3.30.3 Число включений кнопки зажигания (см. 8.22.3).
10.3.31 Статус индикаторов (см. 8.23).
10.3.31.1 Статус индикатора неисправности тормозной системы (см. 8.23.1).
10.3.31.2 Статус индикатора, предупреждающего о неработоспособности системы защиты пассажиров или пешеходов (см. 8.23.2).
10.3.31.3 Общее время работы индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов (см. 8.23.3).
10.3.31.4 Число циклов включения индикатора, предупреждающего о неработоспособности систем защиты пассажиров или пешеходов (см. 8.23.4).
10.3.31.5 Статус индикатора неисправности модуля управления силовым агрегатом (см. 8.23.6).
10.3.31.6 Статус индикатора предупреждения системы контроля давления в шинах (см. 8.23.7).
10.3.32 Статус системы удержания РТС в занимаемой полосе движения (см. 8.24).
10.3.33 Широта (см. 8.25).
10.3.34 Долгота (см. 8.26).
10.3.35 Абсолютное давление во впускном коллекторе (см. 8.27).
10.3.36 Массовый расход воздуха (см. 8.28).
10.3.37 Минуты работы до события (см. 8.29).
10.3.38 Информация о срабатывании устройств защиты пассажиров/пешеходов (см. 8.32).
10.3.38.1 Статус систем защиты пассажиров/пешеходов (см. 8.32.1).
10.3.38.2 Время срабатывания устройства защиты пассажиров/пешеходов (см. 8.32.2).
10.3.39 Статус стояночного тормоза (см. 8.35).
10.3.40 Значение крутящего момента на выходном валу двигателя (см. 8.37).
10.3.41 Состояние индикатора отключения системы предотвращения опрокидывания
Отображаемое состояние отключения системы предотвращения опрокидывания (см. таблицу 101).
Таблица 101 - Состояние индикатора отключения системы предотвращения опрокидывания
Единица измерения | Неприменимо |
Минимальный шаг | Включен (подушки безопасности отключены/деактивированы) или выключен (подушки безопасности включены) |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Опорная точка отсчета | От минус 1 до 0,1 с относительно нулевого времени |
Тип элемента данных | III |
10.3.42 Угол вращения (см. 8.38).
10.3.42.1 Угол крена (см. 8.38.1).
Примечание - Для системы защиты пассажиров при опрокидывании угол крена или скорость крена должны относиться к типу I. Остальные параметры данных должны относиться к типу II.
10.3.43 Угловая скорость вращения (см. 8.39).
10.3.43.1 Скорость крена (см. 8.39.1).
Примечание - Для системы защиты пассажиров при опрокидывании угол крена или скорость крена должны относиться к типу I. Остальные параметры данных должны относиться к типу II.
10.3.44 Число оборотов в минуту (см. 8.40).
10.3.45 Статус застежки ремня безопасности (см. 8.41).
10.3.46 Статус переключателя в направляющей сиденья (см. 8.42).
10.3.47 Момент превышения расчетного диапазона датчика, ХХ (см. 8.43).
10.3.48 Отображаемая скорость РТС (см. 8.44).
10.3.49 Угол поворота рулевого колеса (см. 8.45).
10.3.50 Таймер синхронизации перед событием (см. 8.46).
10.3.51 Положение дроссельной заслонки (см. 8.47).
10.3.51.1 Относительное положение дроссельной заслонки двигателя (см. 8.47.1).
10.3.51.2 Относительное положение педали управления двигателем (см. 8.47.2).
10.3.52 Статус электронной системы контроля тяги (см. 8.48).
10.3.53 Статус индикаторов указателей поворота (см. 8.49).
10.3.54 Идентификационный номер РТС (см. 8.50).
10.3.55 Пробег РТС (см. 8.51).
11 Параметры, записываемые бортовыми устройствами регистрации событий, и элементы данных, относящиеся к системам автоматизированного управления
11.1 В данном разделе устанавливаются параметры РТС и элементы данных, отражающие работу САУ и относящиеся к области применения настоящего стандарта. Эти дополнительные элементы данных применяют при реконструкции обстоятельств и причин ДТП с участием РТС, оборудованных САУ. Они позволят определить, требуется ли дополнительный анализ работы САУ или систем, не связанных с САУ.
11.2 Элементы данных, относящиеся к системам автоматизированного управления
11.2.1 Вмешательство пользователя, готового к резервному выполнению задач управления РТС в соответствии с ГОСТ Р 58823, в работу САУ.
Сигнал отображающий, вмешался ли пользователь, готовый к резервному выполнению задач управления РТС, в работу САУ (см. таблицу 102).
Таблица 102 - Сигнал, отображающий факт вмешательства пользователя рассматриваемого транспортного средства в работу системы автоматизированного управления
Единица измерения | Неприменимо |
Минимальный шаг | Да или нет |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | IV |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
11.2.2 Статус системы автоматизированного управления
Статус САУ РТС (см. таблицу 103).
Таблица 103 - Статус системы автоматизированного управления рассматриваемого транспортного средства
Единица измерения | Неприменимо |
Минимальный шаг | "САУ выполняет задачи управления" (номинальный режим), "Решение задачи резервного выполнения задач управления" (неноминальный режим), "САУ выдала пользователю запрос на вмешательство", "Режим достижения состояния минимального риска", "САУ не осуществляет управление РТС" |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | IV |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
11.2.3 Активирована стратегия устранения сбоев
Режим работы РТС в случае, если не выполнено резервное решение задачи управления (см. таблицу 104).
Таблица 104 - Активирована стратегия устранения сбоев
Единица измерения | Неприменимо |
Минимальный шаг | "САУ выполняет задачи управления" (номинальный режим), "САУ выполняет задачи резервного восстановления задачи управления" (неноминальный режим), "САУ выдала пользователю запрос на вмешательство", "Режим достижения состояния минимального риска", "САУ не осуществляет управление РТС" |
Минимальный диапазон | Неприменимо |
Минимальная погрешность | Неприменимо |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | IV |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
11.2.4 Скорость, заданная системой автоматизированного управления
Скорость РТС, заданная САУ (см. таблицу 105).
Таблица 105 - Скорость, заданная системой автоматизированного управления
Единица измерения | км/ч |
Минимальный шаг | 1 |
Минимальный диапазон | От 0 до 200 |
Минимальная погрешность | ±1 |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | IV |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
11.2.5 Запрос на вмешательство воздействием на рулевое управление
Запрос на действия рулевым управлением РТС, сделанный бортовой САУ (см. таблицу 106).
Таблица 106 - Запрос на действия рулевым управлением рассматриваемого транспортного средства, сделанный системой автоматизированного управления
Единица измерения | Градус |
Минимальный шаг | 5 |
Минимальный диапазон | От минус 250 (против часовой стрелки) до 250 (по часовой стрелке) |
Минимальная погрешность | ±5% от измеренного значения |
Минимальный интервал записи | От минус 5,0 до 0 с относительно нулевого времени |
Минимальная частота записей | 2 записи в секунду |
Тип элемента данных | IV |
Примечание - Этот элемент данных о предаварийном состоянии может быть рассогласован относительно других элементов данных и нулевого времени, поэтому эталонная точность по времени составляет от минус 1,1 до 0 с относительно нулевого времени.
12 Протокол инструмента считывания бортового устройства регистрации событий
12.1 Основные положения
Данный раздел устанавливает основы общего физического интерфейса и определения протоколов, необходимых для извлечения записей, хранящихся в БУРС легковых ТС, в соответствии с требованиями [4]. Основным физическим интерфейсом для инструмента считывания записей БУРС является диагностический разъем, который соответствует требованиям [5].
Данный раздел предназначен для разработки инструментов считывания БУРС. Инструмент считывания предназначен для взаимодействия с легковыми ТС и создания отчетов БУРС с форматами элементов данных, указанными в разделах 5-11.
В данном разделе указывается, как записи БУРС должны извлекаться, транслироваться и отображаться с помощью инструмента считывания БУРС. Он не определяет, как записи БУРС записываются и хранятся на конкретных ТС.
В данном разделе рассматривается извлечение записей БУРС (включая создание и трансляцию изображений) через соединение с диагностическим разъемом в соответствии с [5] или через прямое соединение с ЭБУ, содержащим запись БУРС. Прямое подключение к ЭБУ может потребовать использования специализированных интерфейсных адаптеров.
В данном разделе определяется протокол для формирования изображений, трансляции и представления отчетов БУРС с ТС, оснащенных БУРС. Он определяет способ подключения инструмента к ТС. Он предназначен для использования теми средствами разработки, которые предназначены для извлечения записей БУРС, а также теми, кто использует такие инструменты для извлечения отчетов записей БУРС.
12.2 Безопасность данных
Все отображаемые данные, извлеченные из памяти БУРС и сохраненные с помощью инструмента считывания БУРС, должны быть аутентифицированы и зашифрованы с помощью стандарта аутентификации и шифрования, согласованного с автопроизводителем РТС.
12.3 Непротиворечивость данных
Чтобы гарантировать, что запись БУРС может последовательно отображаться с помощью инструмента считывания БУРС, инструмент должен автоматически считать и отобразить запись БУРС как минимум три раза и сравнить отображенные записи, чтобы убедиться, что они совпадают.
Если записи БУРС не совпадают, инструмент должен отобразить пользователю сообщение с указанием ошибки и объяснением характера ошибки. Если обнаружена ошибка, инструмент считывания БУРС не должен сохранять или транслировать запись БУРС.
12.4 Нейтральность данных
Инструмент должен запрашивать данные таким образом, чтобы они были максимально нейтральными (независимыми). Для этого рекомендуется использовать только такие диагностические сервисы (если они поддерживаются ЭБУ), которые запрашивают данные без активации системной диагностики, для подавления записи диагностических кодов неисправностей во время процесса сканирования при первоначальном включении ЭБУ.
12.5 Физический интерфейс
12.5.1 Извлечение записей бортового устройства регистрации событий на борту рассматриваемого транспортного средства
Для считывания записей БУРС РТС необходимо использовать диагностический разъем, соответствующий требованиям [5]. Этот инструмент должен учитывать использование другими изготовителями дискреционных выводов на разъеме в соответствии с [5], назначение выводов для конкретного ТС и уникальные свойства различных электрических архитектур (см. рисунок 3). При извлечении записей БУРС на борту ТС ЭБУ должен быть подключен к бортовой сети питания РТС.
|
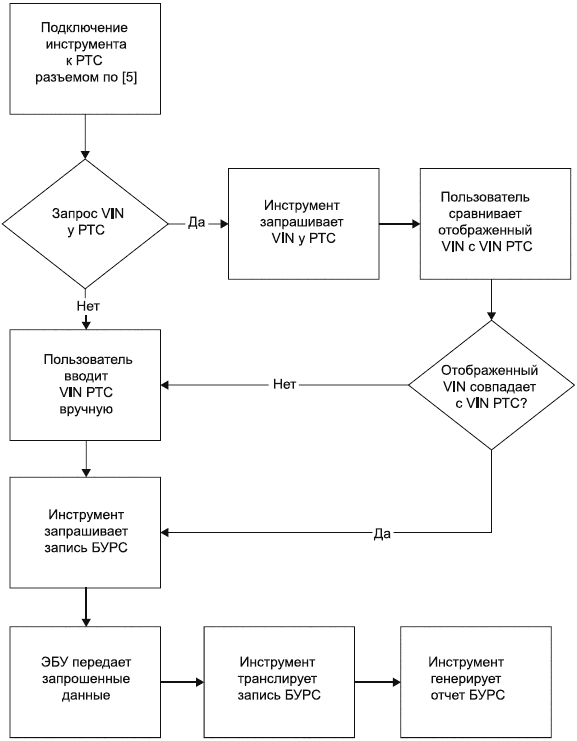
Примечание - "Инструмент" - это инструмент считывания БУРС.
Рисунок 3 - Процесс считывания записей бортового устройства регистрации событий инструментом считывания
12.5.2 Извлечение записей БУРС внешними устройствами
Для того чтобы получить отчет о записях БУРС непосредственно из ЭБУ, инструмент должен обеспечить ЭБУ достаточную мощность для процесса считывания записей БУРС. Описание конкретных факторов, которые должны быть приняты во внимание для прямой связи с каждым ЭБУ, содержащим записи БУРС, выходит за рамки настоящего стандарта.
Ниже приведены некоторые факторы, которые необходимо принять во внимание при сканировании записи БУРС непосредственно из ЭБУ:
а) физический разъем и назначение контактов, используемые поставщиком ЭБУ, и вероятная необходимость в адаптивных разъемах;
б) требования к питанию для отображения записей из ЭБУ, когда он не подключен к бортовой сети РТС во время считывания;
в) может потребоваться иной сетевой протокол и/или скорость передачи данных, отличные от тех, которые требуются для формирования изображения через разъем, соответствующий [5], для прямой связи с ЭБУ;
г) данные, необходимые для формирования полного отчета о записях БУРС, могут быть распределены по нескольким ЭБУ.
12.6 Обзор процесса считывания записей инструментом считывания БУРС на ТС
Процесс считывания записей бортового устройства регистрации событий инструментом считывания см. рисунок 3.
12.6.1 Инструмент считывания БУРС подключают к разъему РТС в соответствии с [5].
12.6.2 Инструмент считывания БУРС считывает VIN, пользователь инструмента убеждается, что показание VIN совпадает с показаниями ТС, к которому подключен инструмент считывания БУРС. В тех случаях, когда VIN не может быть считан инструментом, пользователь инструмента вводит VIN вручную.
12.6.3 Инструмент считывания БУРС использует VIN для выбора правильного протокола связи, физических идентификаторов и правильной трансляции для рассматриваемой записи БУРС.
12.6.4 Если ТС поддерживается инструментом считывания БУРС, инструмент считывает и сохраняет данные из ЭБУ.
12.6.5 Если в процессе формирования изображения возникает ошибка, инструмент считывания БУРС отображает соответствующее сообщение пользователю (например, "Автомобиль не поддерживается" или "Произошла ошибка связи").
12.7 Обзор руководства по сбору данных
При работе с инструментом считывания БУРС необходимо следовать рекомендациям его производителя.
При работе с системами безопасности РТС или рядом с ними необходимо соблюдать рекомендации их производителей по технике безопасности.
12.7.1 Возможные шаги для загрузки данных БУРС из РТС или ЭБУ
Описание процесса сбора данных бортового устройства регистрации событий инструментом считывания БУРС см. рисунок 4.
|
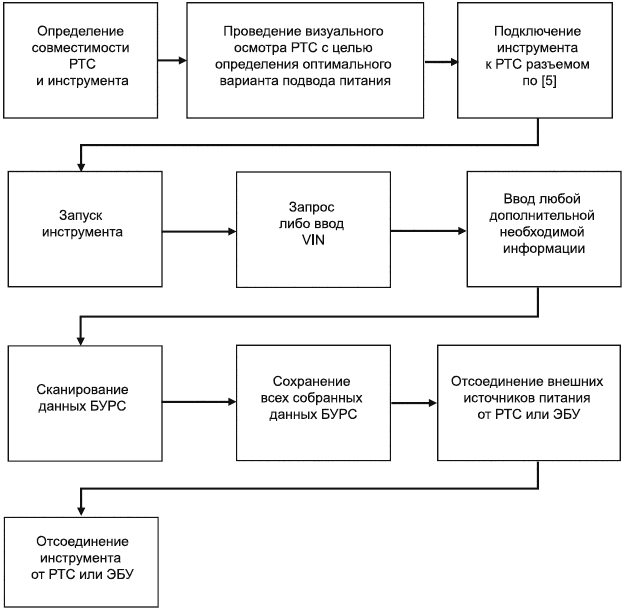
Примечание - "Инструмент" - инструмент считывания БУРС.
Рисунок 4 - Описание процесса сбора данных бортового устройства регистрации событий инструментом считывания БУРС
Для считывания данных БУРС из РТС или ЭБУ осуществляют следующие шаги:
а) определяют совместимость РТС и инструмента считывания БУРС;
б) проводят визуальный осмотр РТС для определения наилучшего способа подвода питания к РТС или ЭБУ:
- проверяют состояние аккумуляторной батареи и соответствующей проводки с целью определения достаточности запаса энергии в РТС и целостности цепи;
- проверяют состояние разъема передачи данных (согласно [5]) и соответствующей проводки;
- убеждаются в надежной установке ЭБУ на РТС; при необходимости надежно устанавливают и закрепляют ЭБУ для предотвращения его смещения при сборе данных БУРС;
в) при необходимости подключают инструмент считывания БУРС к РТС или ЭБУ;
г) включают инструмент считывания БУРС;
д) считывают VIN с РТС или вводят его вручную при необходимости;
е) вводят любую дополнительную информацию по мере необходимости или по запросу инструмента;
ж) осуществляют сканирование данных БУРС;
и) сохраняют собранные данные БУРС;
к) отключают внешний источник питания от РТС или ЭБУ;
л) отсоединяют инструмент считывания БУРС от РТС или ЭБУ.
Примечание - Предпочтительный порядок операций, которые следует использовать при сборе данных БУРС:
а) считывают данные БУРС подключением инструмента считывания БУРС к разъему передачи данных:
- если аккумулятор разряжен или отсоединен, проверяют наличие короткого замыкания на массу в положительной цепи аккумулятора, прежде чем подавать питание на РТС;
- может потребоваться альтернативный источник и/или цепь питания;
б) считывают данные БУРС подключением инструмента считывания БУРС непосредственно к ЭБУ пока он установлен на РТС;
в) считывают данные БУРС подключением инструмента считывания БУРС непосредственно к ЭБУ после того, как он был снят с РТС и надежно закреплен на плоской, ровной и жесткой поверхности.
12.8 Отчет БУРС
12.8.1 Оглавление отчета
12.8.1.1 Информация, показанная в таблице 107, представляет собой оглавление отчета о записях БУРС. Данная информация должна содержаться в начале отчета. Содержание отчета должно быть составлено в порядке, представленном в таблице 107.
Таблица 107 - Содержание отчета бортового устройства регистрации событий
Отображаемое название | Описание | Источник данных | Формат |
Проверенный/введенный пользователем VIN | Идентификационный номер РТС, введенный пользователем в инструмент считывания БУРС для идентификации РТС | Ввод пользователем | 17 знаков, буквенно- |
Имя пользователя | Ф.И.О. пользователя, осуществляющего считывание записей БУРС из ЭБУ | Ввод пользователем | Текстовый |
Наименование производителя ПО устройства считывания БУРС | Наименование организации- | Приложение устройства считывания БУРС | Текстовый |
Наименование производителя интерфейсного устройства РТС | Наименование организации- | Приложение устройства считывания БУРС | Текстовый |
Серийный номер интерфейсного устройства РТС | Серийный номер интерфейсного устройства РТС для устройства считывания БУРС | Приложение устройства считывания БУРС | Буквенно- |
Версия ПО для отображения данных БУРС | Версия ПО инструмента считывания БУРС, используемая для отображения записей БУРС из ЭБУ | Приложение устройства считывания БУРС | Буквенно- |
Версия ПО для трансляции данных БУРС | Версия ПО инструмента считывания БУРС, используемая для трансляции записей БУРС в отчет | Приложение устройства считывания БУРС | Буквенно- |
Дата и время сканирования данных БУРС | Дата и время, когда данные БУРС были отсканированы | Инструмент считывания данных БУРС использует дату | ГГГГ/ММ/ДД, |
Дата и время трансляции данных БУРС | Дата и время, когда данные БУРС были транслированы | и время, используемые в ПО персонального компьютера | формат |
Использование адаптера (опционально) | Например, дополнительная информация относительно адаптера, необходимого для поддержки команд подавления разъема передачи данных при внешнем сканировании | Инструмент считывания БУРС | Текстовый |
12.8.1.2 Пример отчета БУРС
Пример отчета бортового устройства регистрации событий приведен в таблице 108.
Таблица 108 - Пример отчета бортового устройства регистрации событий
Считанный или введенный пользователем VIN | 2С1ВК46К67U000001 |
Имя пользователя | Иван Иванович Иванов |
Наименование производителя ПО устройства считывания БУРС | Initech, Inc. |
Наименование производителя интерфейсного устройства РТС | Initech, Inc. |
Серийный номер интерфейсного устройства РТС | ITXN00035 |
Версия ПО для отображения данных БУРС | 1.9.35 |
Версия ПО для трансляции данных БУРС | 2.7.02 |
Дата и время сканирования данных БУРС | 03/20/2011, 12:00:00 |
Дата и время трансляции данных БУРС | 07/01/2011, 12:00:00 |
Использование адаптера | Да |
12.8.2 Верификация данных
Отчет о записи БУРС должен отображать в шестнадцатеричной форме все данные, полученные из ЭБУ с помощью инструмента считывания БУРС. Шестнадцатеричные данные должны быть отформатированы таким образом, чтобы местоположения полученных данных были надлежащим образом отмечены.
12.8.3 Элементы данных в записях БУРС
Элементы данных, содержащиеся в записях БУРС, должны сообщаться в формате, определенном в разделах 5-11.
12.8.4 Обработка недоступных или неверных данных
Обработка недоступных или неверных данных в отчете определяется каждым производителем; однако то, как инструмент считывания БУРС обнаруживает такие данные, приведено в 6.3.
13 Требования к корпусам электронных блоков управления, хранящих записи бортовых устройств регистрации событий, в части защиты от факторов окружающей среды
13.1 ЭБУ, хранящий записи БУРС, должен как минимум соответствовать классификациям корпусов, перечисленным в таблице 109, в соответствии с требованиями [3].
13.2 ЭБУ должен удовлетворять требованиям к корпусам электронных устройств в части защиты от факторов окружающей среды, приведенным в ГОСТ 14254.
Таблица 109 - Характеристики корпусов электронных блоков управления
Расположение ЭБУ | Классификация корпуса | Описание |
Моторный отсек | IP56 | Защита от пыли. Защита от сильных потоков воды |
Салон | IP51 | Защита от пыли. Защита от вертикального падения капель |
Багажник | IP51 | Защита от пыли. Защита от вертикального падения капель |
| ||
|
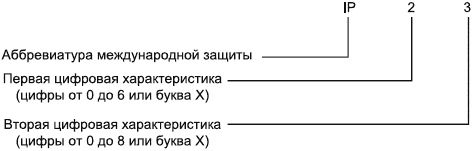
IP5x - пыль может попасть в корпус, но не повлиять на работу.
IPx1 - вертикально падающие капли не должны оказывать вредного воздействия.
IPx6 - поток воды, направленный на корпус с любого направления, не должен оказывать вредного воздействия.
Приложение А
(обязательное)
Методы проведения испытаний бортовых устройств регистрации событий
А.1 Общие сведения
В настоящем приложении определены процедуры, предназначенные для проверки соответствия выходных данных БУРС заданным пределам значений, измеренным датчиком на входе в устройство. Данная методика соответствует требованиям [6].
А.2 Общие положения
Существуют БУРС для ТС, позволяющие анализировать ДТП и подобные им события, которые определяются по срабатыванию соответствующих пороговых триггеров. Лабораторные краш-тесты, проводимые изготовителем ТС, обеспечивают основу для оценки соответствия. Настоящее приложение описывает методы, которые могут использоваться для оценки соответствия заданным выходным параметрам БУРС. Также описаны ограничения этих методов.
А.3 Основные запрашиваемые параметры
А.3.1 Сигналы ускорения, используемые для получения значения изменения продольной скорости и связанных с ним параметров (максимального значения и времени максимального значения), получают во время тестирования согласно [7], [8], включая сигналы, вызванные в испытаниях на соответствие согласно [9]. Для оценки соответствия и точности этих сообщенных параметров испытания должны проводиться с помощью контрольно-измерительных приборов, позволяющих сравнивать выходные данные БУРС и соответствующие лабораторные сигналы после испытания. Контрольно-измерительные приборы должны включать эталонный(ые) акселерометр(ы), установленный(ые) и контролируемый(ые) при следующих условиях.
А.3.1.1 Способ и место крепления
При расположении и ориентации эталонного(ых) датчика(ов) необходимо максимизировать надежность передачи сигнала и обеспечить учет внеосевых сигналов, проницаемости и других факторов. Акселерометр должен быть установлен таким образом, чтобы сигнал от эталонного образца включал полное содержание сигнала, которое может быть реализовано с помощью датчика. Эталонный сигнал "х", используемый для расчета ВКП и НКП, должен быть расположен вблизи места расположения акселерометра БУРС, на аналогичной монтажной поверхности, чтобы обеспечить эквивалентную связь сигналов. Если это невозможно, могут потребоваться дополнительные допуски для обеспечения соответствия за счет других факторов, которые влияют на сигналы и поглощение, то есть параметров нежестких тел, особенно для событий, предполагающих необходимость в нескольких векторных входах. Для этого сценария рекомендуется консультация с производителем РТС. Если для согласования событий и времени используются измерения с участием пиротехники, должен использоваться приемлемый метод, согласованный с производителем.
Изготовитель ТС должен предоставить информацию о рекомендованном размещении акселерометра, основанную на внутренних методах испытаний, и рекомендовать интерфейс для метода(ов) мониторинга пиротехнических устройств.
А.3.1.2 Получение сигнала
Пример требований к типичным эталонным сигналам и поглощению приведен в таблице А.1.
Таблица А.1 - Пример требований к типичным эталонным сигналам и поглощению
Переменная | Требование |
Класс частоты | Класс 1000 (отсечка 1000 Гц) |
Класс диапазона (амплитуды) | Класс 1000 g, подходящий для конкретного расположения |
Разрешение | 0,5 g или выше. Цифровые слова длиной не менее 12 бит (включая знак) должны использоваться для обеспечения приемлемой точности при обработке данных. Младший значащий бит должен соответствовать не более чем 0,2% САС (класс амплитуды канала) |
Изготовитель РТС может предоставить рекомендуемые параметры акселерометра на основе внутренних методов испытаний.
А.3.1.3 Валидация эталонного датчика
В ходе лабораторного краш-тестирования может потребоваться подтверждение соответствия эталонного сигнала, если БУРС и эталонный сигнал не соответствуют требованиям настоящего стандарта, или определение соответствующего альтернативного источника для испытаний. Для этой цели рекомендуются следующие оценки.
А.3.1.3.1 Искажение сигнала
Оценка эталонного сигнала на наличие признаков искажения. Если такие признаки обнаружены, такой сигнал не может являться действительным источником для установления соответствия требованиям настоящего стандарта.
А.3.1.3.2 Сравнение с соответствующими параметрами
Сравнение эталонного сигнала с соответствующими параметрами (например, скоростью целевого ТС, измеренной скоростью во время удара и т.д.). Если эталонный сигнал имеет разумную корреляцию с этими связанными параметрами, то его можно считать действительным.
Если первичный эталонный сигнал не демонстрирует корреляцию с соответствующими параметрами, рассматривают альтернативные смонтированные на РТС датчики, которые, предположительно, помогут получить выходной сигнал, аналогичный первичному (целевому) эталонному сигналу (например, акселерометры, установленные в непосредственной близости от первого эталонного датчика). Если этот альтернативный эталонный сигнал демонстрирует достаточную корреляцию с соответствующими параметрами, описанными в настоящем стандарте, то этот эталонный сигнал может быть использован в качестве альтернативы первичному сигналу. Однако может потребоваться соответствующая корректировка пределов соответствия для учета различий в местоположении. В частности, альтернативное местоположение может вносить дополнительные ошибки в график изменения скорости и/или синхронизацию этого сигнала по сравнению с эталонным местоположением БУРС, для которого могут потребоваться дополнительные допуски, добавленные к отмеченным значениям, для обеспечения соответствия требованиям, определенным настоящим стандартом, из-за различных сигналов, возникающих в этой области, или из-за типа оцениваемого события.
А.3.1.4 Общая сертификация других параметров
Некоторые элементы испытаний включают в себя переменные, которые не были должным образом проверены в момент сертификации при столкновении (например, точность для указанной скорости РТС, положение дроссельной заслонки и т.д.). В этих случаях обращаются к производителю РТС за отчетом о соответствии требованиям таких переменных.
А.3.2 Особенности систем транспортного средства
Системы пассивной безопасности ТС разработаны с учетом оптимизации динамических характеристик удержания. В некоторых случаях их конструкции могут налагать ограничения на способность соответствовать заданным требованиям.
А.3.2.1 Отсечка сигнала датчика
БУРС может включать датчики различной конструкции, которые оптимизированы для регистрации различных характеристик и, следовательно, могут не удовлетворять требованиям к некоторым элементам во время столкновения. Примером этого может быть диапазон элемента д, который может привести к отсечке и корреляционным различиям значений, полученных во время испытываемого события, от значений лабораторного эталонного датчика. Эта ошибка может привести к отклонениям значений для некоторых элементов. Насыщение внутреннего датчика БУРС может быть продемонстрировано с обработкой эталонного датчика к сигналу (по образцу) внутреннего датчика и/или данных ускорения БУРС. Для указания на этот случай используют включение в БУРС внутренней метки, обозначающей время насыщения триггера. Иллюстрация этого приведена на рисунке А.1 (сравнение ускорений при ударе спереди справа на скорости 56 км/ч) и на рисунке А.2 (сравнение изменения скорости при ударе спереди справа на скорости 56 км/ч).
|
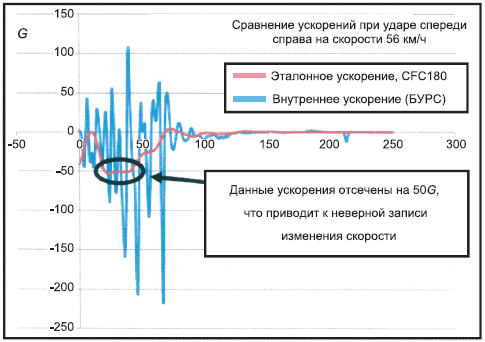
Рисунок А.1 - Пример события с отсеченным сигналом ускорения
|
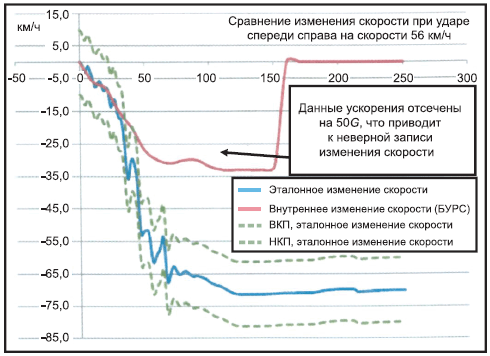
Рисунок А.2 - Пример события изменения скорости, основанный на отсеченном сигнале ускорения
А.3.2.2 Наведенные входные сигналы во время испытания
Метод проведения испытаний ТС может регистрировать во время испытания ложные сигналы, которые могут интерпретироваться системой как триггер (может быть "0" и/или инициирован сигнал "пробуждения" для алгоритма, вызывающий сохранение новых записей о времени для данного условия испытания). Такие сигналы могут наводиться системами буксировки ТС или другими методами, используемыми для проведения конкретного испытания.
А.3.2.3 Прочие условия
Ниже приведен список дополнительных условий испытаний, которые могут привести к ошибке при сравнении эталонного сигнала с сигналом БУРС:
а) расположение эталонного датчика/наложение сигналов (в отношении внутренних датчиков модуля);
б) проблемы с получением сигнала, выборка, диапазоны, фильтрация;
в) неисправность эталонного датчика; несогласованные отклики сигнала эталонного датчика (ошибочные, от шины), отсечки и т.д.;
г) ошибки трансляции данных из-за расположения эталонных датчиков относительно внутренних датчиков модуля (поперечная ось, динамические сигналы из-за динамики "не твердого тела");
д) варианты тестовых событий, включая вращение РТС во время испытания, или сигналы от внеосевого наложения на основную ось во время испытания, или отклонения во время испытания.
При подозрении на любую из этих проблем консультируются с производителем РТС для осуществления совместного анализа и/или получения рекомендаций.
А.4 Параметры изменения продольной скорости
А.4.1 Изменение продольной скорости
Таблица А.2 - Изменение продольной скорости
Наименование элемента данных | Записываемый интервал/время (относительно нулевого времени), мс | Частота записи данных, записей в секунду | Минимальный диапазон, км/ч | Погрешность, % | Разрешение, км/ч |
Изменение продольной скорости | От 0 до 250 или | 100 | Минус 100-100 | ±10 от | 1 |
Для подтверждения выходных характеристик БУРС заявленным требованиям их сравнивают с данными эталонного датчика акселерометра в соответствии со следующим процессом. Если не указано иное, t_deploy является временем первого срабатывания.
Пример сигнала о продольном ускорении при столкновении показан на рисунке А.3.
|
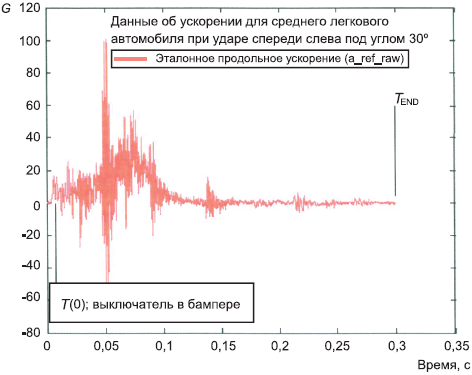
Рисунок А.3 - Пример сигнала о продольном ускорении при столкновении
Изменение продольной скорости вычисляют по следующей формуле
 , (А.1)
, (А.1)
где ![]() - изменение скорости по эталонному сигналу, км/ч;
- изменение скорости по эталонному сигналу, км/ч;
![]() , с;
, с;
![]() - момент контакта РТС с препятствием (обычно время срабатывания контактного выключателя), с;
- момент контакта РТС с препятствием (обычно время срабатывания контактного выключателя), с;
![]() - сигнал эталонного датчика ускорения, снятый во время события при заданных условиях,
- сигнал эталонного датчика ускорения, снятый во время события при заданных условиях, ![]() ;
;
время, с.
На рисунке А.4 приведен пример кривой продольной скорости для данного сигнала об ускорении.
|
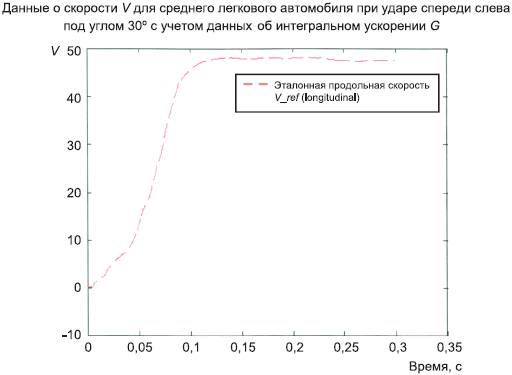
Рисунок А.4 - Пример сигнала об изменении продольной скорости
Эталонный сигнал обрабатывают, как показано в уравнениях (А.2) и (А.3), для получения ВКП и НКП для записи БУРС о значении продольной скорости.
Уравнение (А.2) применяют для расчета верхнего значения диапазона изменения скорости, уравнение (А.3) - для расчета нижнего значения диапазона изменения скорости.
 км/ч, (А.2)
км/ч, (А.2)
 км/ч, (А.3)
км/ч, (А.3)
где ![]() - верхний контрольный предел диапазона изменения скорости;
- верхний контрольный предел диапазона изменения скорости;
![]() - нижний контрольный предел диапазона изменения скорости;
- нижний контрольный предел диапазона изменения скорости;
![]() , с;
, с;
![]() - момент контакта РТС с препятствием (обычно время срабатывания контактного выключателя), с;
- момент контакта РТС с препятствием (обычно время срабатывания контактного выключателя), с;
![]() - сигнал эталонного датчика ускорения, снятый во время события при заданных условиях,
- сигнал эталонного датчика ускорения, снятый во время события при заданных условиях, ![]() ;
;
![]() - сигнал эталонного датчика ускорения, снятый во время события при заданных условиях и прошедший через двухполюсный 150 Гц-фильтр Баттерворта;
- сигнал эталонного датчика ускорения, снятый во время события при заданных условиях и прошедший через двухполюсный 150 Гц-фильтр Баттерворта;
время, с.
В уравнении (А.4) представлен пример двухполюсного 150 Гц - дроссельного фильтра (для значения 10 кГц).
 (A.4)
(A.4)
Значение 10 км/ч получено как 10% допуск для 100 км/ч для изменения продольной скорости.
Примечание - ВКП использует "raw", чтобы обеспечить отклонения в фильтрации, выполняемой на эталонных датчиках. Этот ВКП обеспечивает максимальное время нарастания и включает сигнал пиковой скорости. НКП использует "отфильтрованный" сигнал для обеспечения потенциальной задержки из-за фильтрации по времени, что позволяет уменьшить время возрастания и обеспечить минимальный диапазон амплитуды скорости.
|
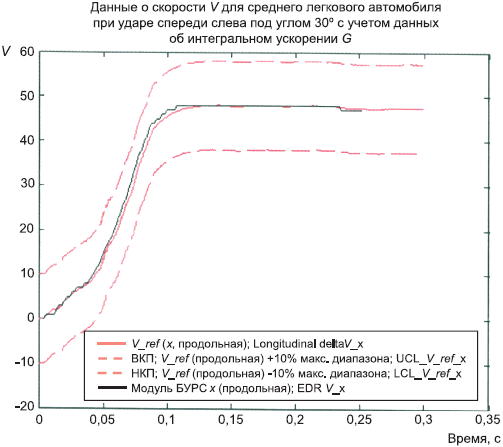
Рисунок А.5 - Пример сигнала об изменении продольной скорости с верхним контрольным пределом и нижним контрольным пределом
После установления верхнего и нижнего контрольных пределов, основанных на эталонном сигнале, на график накладывают запись БУРС для установления соответствия этих пределов (см. рисунок А.5). Однако поскольку запись БУРС и эталонный сигнал имеют разные значения ![]() , необходимо совместить эти графики, используя общий эталон времени. Это можно сделать одним из двух способов, в зависимости от способа, которым БУРС классифицирует
, необходимо совместить эти графики, используя общий эталон времени. Это можно сделать одним из двух способов, в зависимости от способа, которым БУРС классифицирует ![]() (для постоянно работающего алгоритма или на основе срабатывания подушки безопасности).
(для постоянно работающего алгоритма или на основе срабатывания подушки безопасности).
Первый метод основан на определении ![]() для постоянно работающих алгоритмов, которое гласит:
для постоянно работающих алгоритмов, которое гласит:
Время "Time_zero_longitudinal" - это первая точка в интервале, в которой совокупное изменение продольной скорости ![]() на более чем 0,8 км/ч достигается за период времени 20 мс.
на более чем 0,8 км/ч достигается за период времени 20 мс.
На рисунке А.6 приведен пример записи сигнала об изменении продольной и поперечной скорости с верхним контрольным пределом, нижним контрольным пределом и данными бортового устройства регистрации событий.
|
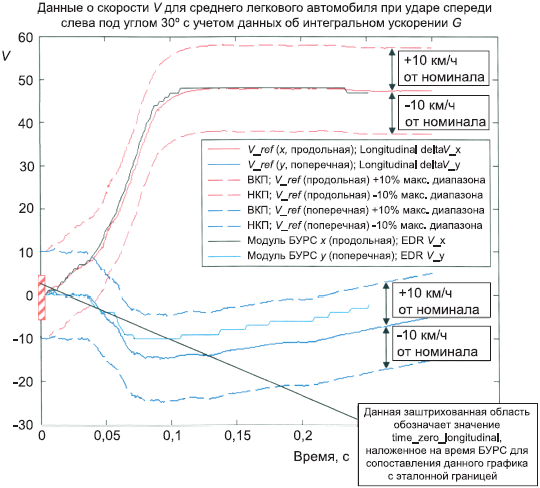
Рисунок А.6 - Пример сигнала об изменении продольной и поперечной скорости с верхним контрольным пределом, нижним контрольным пределом и данными бортового устройства регистрации событий
Второй метод, определяющий общую временную привязку, разработан для случая, когда ![]() - это время срабатывания подушки безопасности (
- это время срабатывания подушки безопасности (![]() ). В этом сценарии время срабатывания защитного устройства используется для синхронизации сигналов. В качестве лабораторной метки используется время срабатывания, записанное устройством контроля тока Сквиба (
). В этом сценарии время срабатывания защитного устройства используется для синхронизации сигналов. В качестве лабораторной метки используется время срабатывания, записанное устройством контроля тока Сквиба (![]() ). Для обеспечения захвата всего события должно быть достаточно времени для предварительного захвата данных до состояния
). Для обеспечения захвата всего события должно быть достаточно времени для предварительного захвата данных до состояния ![]() . Это может быть сделано с помощью контактного переключателя или достаточной глубины буфера в блоке сбора данных. Этот метод применим только для событий, приводящих к ограниченному срабатыванию защитных устройств.
. Это может быть сделано с помощью контактного переключателя или достаточной глубины буфера в блоке сбора данных. Этот метод применим только для событий, приводящих к ограниченному срабатыванию защитных устройств.
Рассмотрим тот же пример, что и в методе 1. В этом примере в качестве "эталонного времени (0)" используют модуль БУРС "time_zero_longitudinal". Для этого метода строят эталонную кривую датчика и выравнивают данные по ![]() . Для выравнивания используются записи БУРС для
. Для выравнивания используются записи БУРС для ![]() и изменения продольной скорости. Затем находят соответствующие значения для эталонного датчика и выравнивают по этой точке пересечения
и изменения продольной скорости. Затем находят соответствующие значения для эталонного датчика и выравнивают по этой точке пересечения
![]() (A.5)
(A.5)
Затем рассчитывают и строят ВКП и НКП с использованием ![]() для выравнивания данных, как было показано выше.
для выравнивания данных, как было показано выше.
Данные БУРС строят "как записанные".
Затем график должен показать перекрытие сигналов со временем для срабатывания в качестве общей точки для обоих случаев. Затем выполняют тестирование значений в соответствии с требованиями метода 1 и оценивают соответствие эталонного и внутреннего значений сигнала.
На рисунке А.7 показано выравнивание кривой изменения продольной скорости (БУРС) с учетом графиков ВКП/НКП:
![]() (A.6)
(A.6)
Проверку других параметров выполняют аналогично способу 1 с соответствующими изменениями с учетом новых нанесенных кривых.
|
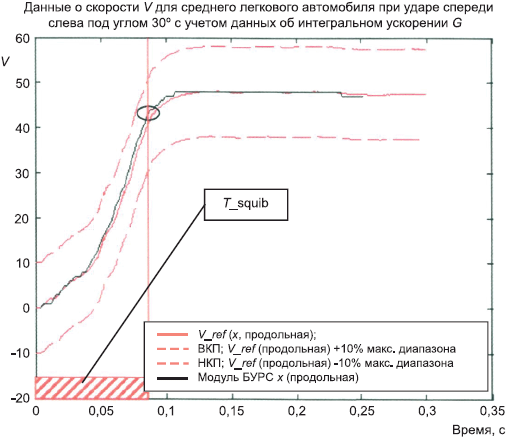
Рисунок А.7 - Пример сигнала об изменении продольной скорости с наложением ![]()
Третий метод для определения общей временной привязки необходим для вычисления T(0) "time_zero_longitudinal" на основе записи БУРС и времени ![]() . Этот метод используют только для событий, приводящих к ограниченному срабатыванию. Он позволяет выполнить вычисления и значения только на основе параметра
. Этот метод используют только для событий, приводящих к ограниченному срабатыванию. Он позволяет выполнить вычисления и значения только на основе параметра ![]() и соответствующим образом выровнять данные. Затем получают эквивалентную "time_zero_longitudinal" для эталонного сигнала датчика, обозначая в записи БУРС как "
и соответствующим образом выровнять данные. Затем получают эквивалентную "time_zero_longitudinal" для эталонного сигнала датчика, обозначая в записи БУРС как "![]() " время первоначального срабатывания защитного устройства. Затем создают эквивалентную точку "time_zero_longitudinal" для данных эталонного датчика. Используя эти данные, строят выходной сигнал эталонного датчика. На графике обращают внимание на время срабатывания или
" время первоначального срабатывания защитного устройства. Затем создают эквивалентную точку "time_zero_longitudinal" для данных эталонного датчика. Используя эти данные, строят выходной сигнал эталонного датчика. На графике обращают внимание на время срабатывания или ![]() . Строят кривые ВКП и НКП, как определено в методе 1, с описанными здесь изменениями для выравнивания по time_zero_longitudinal. Используя записанные данные, строят данные БУРС. БУРС "time_zero_longitudinal" используют "как записано". Это обеспечивает выравнивание по time_zero_longitudinal, как показано в методе 1.
. Строят кривые ВКП и НКП, как определено в методе 1, с описанными здесь изменениями для выравнивания по time_zero_longitudinal. Используя записанные данные, строят данные БУРС. БУРС "time_zero_longitudinal" используют "как записано". Это обеспечивает выравнивание по time_zero_longitudinal, как показано в методе 1.
А.4.2 Максимальное изменение продольной скорости
Максимальное изменение продольной скорости представлено в таблице А.3.
Таблица А.3 - Максимальное изменение продольной скорости
Наименование элемента данных | Записываемый интервал/время (относительно нулевого времени), мс | Частота записей данных, записей в секунду | Минимальный диапазон, км/ч | Погрешность, % | Разрешение, км/ч |
Максимальное изменение продольной скорости | От 0 до 300 или | Неприменимо | Минус 100-100 | ±10 | 1 |
Из записи БУРС определяют время, в которое происходит максимальное изменение скорости. Создают вокруг этого значения допустимый диапазон (AW) с ВКП и НКП, как определено ниже:
а) AW=Maximum delta-V, longitudinal_EDR±tolerance limit (соответственно для ВКП и НКП);
б) tolerance limit=[10% от lat_v_max или long_v_max или 10% от максимального диапазона (10 км/ч)];
________________
На момент составления настоящего стандарта предпочтительная интерпретация для изменения скорости составляла 10%, однако некоторые производители ТС выполняют 10% от максимальной продольной или поперечной скорости по собственным причинам и/или на основании их интерпретаций. Оба варианта включены в настоящее приложение, но приоритетно используется первый, учитывающий 10% от максимальной продольной скорости, а второй - в качестве эталонного испытания.
в) |Maximum Delta_v_max_ref-Delta_v_max_edr|<tolerance limit.
Соответствие выполняется, если EDR для "Delta_v_max" находится в пределах ВКП и НКП.
В качестве альтернативы пользователь может определить соответствие по наличию значения, сохраненного как "Максимальное значение продольной скорости", находящегося в пределах значений массива изменения продольной скорости (не может иметь более высокое значение).
На рисунке А.8 приведен пример сигнала об изменении продольной скорости с ВКП, НКП и данными БУРС.
Maximum delta-V, longitudinalmax|delta-V longitudinal (t)|;
В этом подходе продольный массив продольной скорости состоит из элементов "delta_v" и требуемого интервала времени выборки. Подобный массив может быть сформирован из элементов сигнала ускорения. Пример иллюстрации (используется тот же пример, что и в предыдущем исследовании, но с учетом только продольной скорости) приведен на рисунке А.8.
|
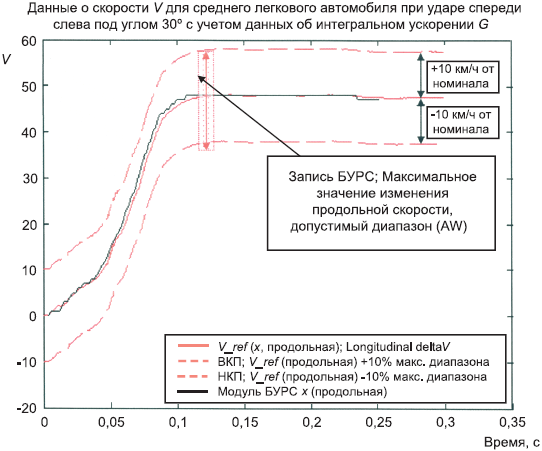
Рисунок А.8 - Пример сигнала об изменении продольной скорости с верхним контрольным пределом, нижним контрольным пределом и данными бортового устройства регистрации событий, с максимальным значением изменения продольной скорости
А.4.3 Время максимального изменения скорости
Время максимального изменения скорости представлено в таблице А.4.
Таблица А.4 - Максимальное изменение продольной скорости
Наименование элемента данных | Записываемый интервал/время (относительно нулевого времени), мс | Частота записей данных, записей в секунду | Минимальный диапазон, мс | Погрешность, мс | Разрешение, мс |
Время максимального изменения скорости | От 0 до 300 или | Неприменимо | 0-300, или | ±3 | 2,5 |
Этот элемент данных определяют как сообщенное время, в которое БУРС записывает максимальное значение изменения скорости. При наблюдении за сигналом изменения скорости был сделан вывод, что для сигналов ![]() пиковые значения часто возникают, когда сигнал начинает приближаться к стационарному значению, но это не всегда так. Во время этой фазы сигнала максимальное значение может представлять незначительное отклонение от среднего значения. Соответственно, время, связанное с этим значением, может изменяться и может не повторяться от испытания к испытанию. Кроме того, сообщенное максимальное время для максимального delta_V EDR может не "непосредственно" коррелировать с максимальным изменением скорости от внешнего эталонного датчика. По этим причинам соответствие оценивают с помощью одного из следующих методов.
пиковые значения часто возникают, когда сигнал начинает приближаться к стационарному значению, но это не всегда так. Во время этой фазы сигнала максимальное значение может представлять незначительное отклонение от среднего значения. Соответственно, время, связанное с этим значением, может изменяться и может не повторяться от испытания к испытанию. Кроме того, сообщенное максимальное время для максимального delta_V EDR может не "непосредственно" коррелировать с максимальным изменением скорости от внешнего эталонного датчика. По этим причинам соответствие оценивают с помощью одного из следующих методов.
Метод 1: Используют данные, определенные для ВКП и НКП для изменения продольной скорости (в сравнении со временем) и максимального изменения скорости от эталонного сигнала датчика, чтобы сравнить их со значением, хранящимся в записи БУРС. Запись БУРС используют в качестве эталонной для определения времени максимального изменения скорости. Допустимый диапазон (AW) создается примерно в то время, когда максимальная точка Delta_v_edr определяется по уравнению
![]() , (A.7)
, (A.7)
где tolerance limit=±3 мс.
Убеждаются в соответствии требованиям:
|Time, maximum Delta_v_ref-Time,maximum,Delta_v_edr|<tolerance limit (3 мс),
где максимальное значение delta_v находится в пределах допуска, указанного в А.4.1, А.4.2.
Иллюстрация с использованием того же примера, что и в предыдущем исследовании, приведена на рисунке А.9.
|
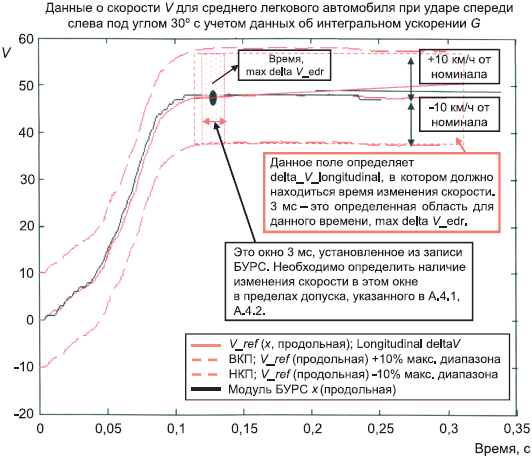
Рисунок А.9 - Пример сигнала об изменении продольной скорости с данными верхнего контрольного предела, нижнего контрольного предела и бортового устройства регистрации событий, со временем максимального изменения продольной скорости
Дополнительно может быть определено:
Для: |Time, max deltaV_edr|±3 мс.
Если |deltaV_ref-deltaV_edr|10 км/ч для любой точки в пределах max deltaV_edr±3 мс.
Затем: требование выполнено.
Метод 2: В качестве альтернативы пользователь может подтвердить соответствие как наличие сообщаемого значения "Максимальное время, Delta_v_edr", напрямую связанного с максимальным значением в массиве продольной скорости "Delta V", в определенных пределах допуска.
Убеждаются, что соблюдено следующее требование:
|Time, max deltaV_intemal; коррелирует с max_deltaV_longitudinal value
-Time, max deltaV_edr (reported)|<tolerance limit (±3 мс).
Время "max deltaV_internal" берется из времени, связанного со значением max_deltaV_longtitudinal, хранящимся в массиве deltaV_longitudinal и массиве времени.
Примечание - В данном случае это "Time, maximum longitudinal delta V", другие компоненты отсутствуют.
Комплексный пример соответствия "max deltaV longitudinal - время"; и "max deltaV longitudinal и deltaV - время" представлен на рисунке А.10. Эта иллюстрация может содержать дополнительную информацию в соответствии с запросом/рекомендациями производителя РТС.
А.5 Прочие параметры
Другие параметры, подлежащие записи для измерения. Состояние записи во время испытания. Валидация соответствия критериям эффективности может быть осуществлена в результате взаимодействия заказчика с поставщиком.
А.5.1 Цикл зажигания при ДТП
Эта последовательность представляет собой один из методов, который может использоваться для оценки соответствия; производителем РТС могут быть рекомендованы альтернативные методы:
- визуализируют данные БУРС с помощью соответствующего инструмента считывания БУРС после выполнения соответствующего краш-теста;
- считывают значение счетчика циклов зажигания из сохраненной записи о ДТП;
- проверяют счетчик циклов зажигания: n>цикл зажигания>0.
|
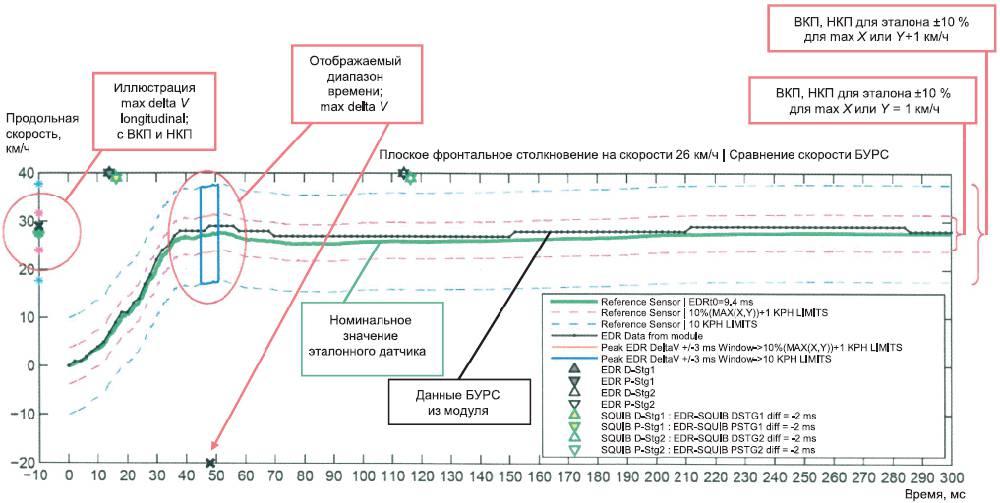
Рисунок А.10 - Комплексный пример соответствия "max delta V longitudinal - время" и "max delta V longitudinal и delta V - время"
А.5.2 Цикл зажигания, загрузка
Эта последовательность представляет собой один из методов, которые могут использоваться для оценки соответствия; производителем РТС могут быть рекомендованы альтернативные методы:
- визуализируют данные БУРС с помощью соответствующего инструмента считывания БУРС после выполнения соответствующего краш-теста;
- считывают значение счетчика циклов зажигания из сохраненной записи о ДТП;
- проверяют счетчик циклов зажигания: n>цикл зажигания>0;
- цикл зажигания, загрузка>цикл зажигания, ДТП.
А.5.3 Первый этап срабатывания фронтальной подушки безопасности водителя, время срабатывания:
- визуализируют данные БУРС с помощью соответствующего инструмента считывания БУРС после выполнения соответствующего краш-теста;
- считывают данные о срабатывании фронтальной подушки безопасности, времени срабатывания из сохраненной записи о ДТП;
- проверяют соответствие подтверждением выполнения следующего выражения:
|Время до срабатывания фронтальной подушки безопасности, измеренное (time to deploy_meas) - Время до срабатывания фронтальной подушки безопасности (данные БУРС) (time to deploy_edr)|<2 мс.
Может потребоваться внести коррективы во "время срабатывания фронтальной подушки безопасности, измеренное" (time to deploy_meas), чтобы учесть корректировки с начального времени (то есть время срабатывания выключателя в бампере) по сравнению с нулевым временем, как описано в А.4.1.
А.5.4 Первый этап срабатывания фронтальной подушки безопасности пассажира, время срабатывания:
- визуализируют данные БУРС с помощью соответствующего инструмента считывания БУРС после выполнения соответствующего краш-теста;
- считывают время срабатывания фронтальной подушки безопасности из сохраненной записи о ДТП;
- проверяют соответствие подтверждением выполнения следующего выражения:
|Срабатывание фронтальной подушки безопасности, время до срабатывания - Срабатывание фронтальной подушки безопасности, время до срабатывания_edr|<2 мс.
Может потребоваться внести коррективы в "срабатывание фронтальной подушки безопасности, время до срабатывания", чтобы учесть корректировки с начального времени (то есть время срабатывания выключателя в бампере) по сравнению с нулевым временем, как описано в А.4.1.
А.5.5 Относительное положение дроссельной заслонки двигателя
Эта последовательность действий представляет собой один из методов, который может использоваться для оценки соответствия; производителем РТС могут быть рекомендованы альтернативные методы:
- визуализируют данные БУРС с помощью соответствующего инструмента считывания БУРС после выполнения соответствующего краш-теста;
- считывают данные о положении дроссельной заслонки из сохраненной записи о ДТП;
- проверяют соответствие подтверждением, что записанное положение дроссельной заслонки соответствует условиям эксплуатации РТС на момент испытания (обычно "ноль").
А.5.6 Рабочая тормозная система, включена/выключена
Эта последовательность действий представляет собой один из методов, который может использоваться для оценки соответствия; производителем РТС могут быть рекомендованы альтернативные методы:
- визуализируют данные БУРС с помощью соответствующего инструмента считывания БУРС после выполнения соответствующего краш-теста;
- считывают данные о рабочей тормозной системе из сохраненной записи о ДТП;
- проверяют соответствие подтверждением, что записанное положение рабочей тормозной системы соответствует условиям эксплуатации РТС на момент испытания (обычно "ВЫКЛ").
А.5.7 Состояние застежки ремня безопасности водителя
Эта последовательность действий представляет собой один из методов, который может использоваться для оценки соответствия; производителем РТС могут быть рекомендованы альтернативные методы:
- визуализируют данные БУРС с помощью соответствующего инструмента считывания БУРС после выполнения соответствующего краш-теста;
- считывают состояние застежки ремня безопасности из сохраненной записи о ДТП;
- проверяют соответствие подтверждением, что записанное состояние застежки ремня безопасности соответствует условиям эксплуатации РТС на момент испытания (в зависимости от режима испытания).
А.5.8 Прочие элементы
Обращаются к поставщику РТС для получения отчета о соответствии требованиям таблицы переменных, которые сообщаются на этапе испытаний, включая А.5.
Они не считаются частью этой процедуры соответствия, поскольку они не проверяются во время испытаний на соответствие, а лишь при сертификации модулей производителем РТС или поставщиком модулей.
Библиография
[1] | ECE/TRANS/WP.29/78/Rev.6 | Сводная резолюция о конструкции транспортных средств (СР.3) |
[2] | SAE J1698-1:2018* | Регистратор данных о событиях. Определения выходных данных (Event Data Recorder - Output Data Definitions) |
________________ * Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - . | ||
[3] | SAE J1698:2017 | Регистратор данных о событиях (Event Data Recorder) |
[4] | SAE J1698-2:2018 | Регистратор данных о событиях. Протокол поиска инструмента (Event Data Recorder - Retrieval Tool Protocol) |
[5] | ИСО 15031-3:2016 (ISO 15031-3:2016) | Транспорт дорожный. Связь между автомобилями и наружным оборудованием для диагностики выбросов автомобиля в окружающий воздух. Часть 3. Диагностический соединитель и связанные с ним электрические сети. Требования и применение (Road vehicles - Communication between vehicle and external equipment for emissions-related diagnostics - Part 3: Diagnostic connector and related electrical circuits: Specification and use) |
[6] | SAE J1698-3:2015 | Регистратор данных о событиях. Оценка соответствия (Event Data Recorder - Compliance Assessment) |
[7] | FMVSS 208 | Стандарт о защите пассажиров при аварии (Occupant crash protection standard) |
[8] | FMVSS 214 | Защита при боковом столкновении. Динамическое требование к исполнению (Side Impact Protection - Dynamic Performance Requirement) |
[9] | e-CFR, Title 49 - Subtitle B-Chapter 5 - Part 563 | Регистратор данных о событиях (Event Data Recorders) |
УДК 656.13:006.354 | ОКС 35.240.60 |
Ключевые слова: транспортное средство, электронное устройство, бортовое устройство, регистрация событий | |
Электронный текст документа
и сверен по:
, 2020
{kind=link}