ГОСТ Р ИСО/МЭК 14443-3-2014
Группа Э46
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Карты идентификационные
Карты на интегральных схемах бесконтактные
КАРТЫ БЛИЗКОГО ДЕЙСТВИЯ
Часть 3
Инициализация и антиколлизия
Identification cards. Contactless integrated circuit cards. Proximity cards. Part 3. Initialization and anticollision
ОКС 35.240.15
ОКП 40 8470
Дата введения 2016-01-01
Предисловие
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт стандартизации и сертификации в машиностроении" (ВНИИНМАШ) и Техническим комитетом по стандартизации ТК 22 "Информационные технологии" на основе собственного аутентичного перевода на русский язык стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 22 "Информационные технологии"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 11 ноября 2014 г. N 1529-ст
4 Настоящий стандарт идентичен международному стандарту ИСО/МЭК 14443-3:2011* "Карты идентификационные. Карты на интегральных схемах бесконтактные. Карты близкого действия. Часть 3. Инициализация и антиколлизия (ISO/IEC 14443-3:2011 "Identification cards - Contactless integrated circuit cards - Proximity cards - Part 3: Initialization and anticollision"), включая изменения А1:2011, А2:2012, А3:2014 и А6:2014.
________________
* Доступ к международным и зарубежным документам, упомянутым здесь и далее по тексту, можно получить, перейдя по ссылке на сайт . - .
Изменения к указанному международному стандарту, принятые после его официальной публикации, внесены в текст настоящего стандарта и выделены двойной вертикальной линией, расположенной на полях от соответствующего текста, а обозначение и год принятия изменения приведены в скобках после соответствующего текста.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении ДА
(Измененная редакция, Изм. N 1).
5 ВВЕДЕН ВПЕРВЫЕ
6 Некоторые положения международного стандарта, указанного в пункте 4, могут являться объектом патентных прав. Международная организация по стандартизации (ИСО) и Международная электротехническая комиссия (МЭК) не несут ответственности за идентификацию подобных патентных прав.
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (gost.ru)
ВНЕСЕНО Изменение N 1, утвержденное и введенное в действие приказом Федерального агентства по техническому регулированию и метрологии от 09.06.2017 N 529-ст c 01.03.2018
Изменение N 1 внесено изготовителем базы данных по тексту ИУС N 9, 2017 год
Введение
ИСО/МЭК 14443 - серия стандартов, описывающих параметры идентификационных карт по ИСО/МЭК 7810 и их применение в рамках обмена информацией.
В настоящем стандарте описаны процедуры опроса карт близкого действия, входящих в поле действия терминального оборудования близкого действия, формат байта и кадровая синхронизация, начальное содержание команд запроса (Request) и ответа на запрос (Answer to Request), методы обнаружения и коммуникации с одной картой близкого действия среди нескольких карт близкого действия (антиколлизия) и другие параметры, необходимые для инициализации коммуникаций между картой близкого действия и терминальным оборудованием близкого действия. Протоколы и команды, используемые на верхних уровнях и приложениями, а также после начальной фазы, описаны в ИСО/МЭК 14443-4.
Серия стандартов ИСО/МЭК 14443 направлена на то, чтобы обеспечить работу карт близкого действия в присутствии других бесконтактных карт, соответствующих ИСО/МЭК 10536 и ИСО/МЭК 15693.
Международная организация по стандартизации (ИСО) и Международная электротехническая комиссия (МЭК) обращают внимание на заявление о том, что соответствие настоящему стандарту может повлечь использование патента.
ИСО и МЭК не занимают никакой позиции относительно наличия, действительности и области применения этого патентного права.
Обладатели этого патентного права заверили ИСО и МЭК, что они готовы вести переговоры с претендентами со всего мира о предоставлении лицензии на разумных и недискриминационных условиях, включая сроки. Это заявление обладателей патентного права зарегистрировано в ИСО и МЭК. Информацию можно получить у:
Обладатель патента | Сведения |
FRANCE TELECOM | US Patent US5359323 |
INNOVOTRON | WO 9936877A1 |
MOTOROLA | Сведений нет |
PHILIPS | PHO 94.520 |
Следует обратить внимание на тот факт, что некоторые элементы настоящего стандарта могут быть объектом патентных прав, помимо тех, что идентифицированы выше. ИСО и МЭК не несут ответственности за идентификацию всех или некоторых таких прав.
ИСО/МЭК 14443-3 подготовлен подкомитетом N 17 "Карты и идентификация личности" совместного технического комитета N 1 ИСО/МЭК "Информационные технологии" (ISO/IEC JTC 1/SC 17).
1 Область применения
Настоящий стандарт определяет:
- процедуры опроса карт или объектов близкого действия (PICC), входящих в поле действия терминального оборудования близкого действия (PCD);
- формат байта, кадры и синхронизацию, используемые во время начальной фазы передачи между PCD и PICC;
- начальное содержание команд запроса (Request) и ответа на запрос (Answer to Request);
- методы обнаружения и коммуникации с одной PICC среди нескольких PICC (антиколлизия);
- параметры, необходимые для инициализации передачи между PICC и PCD;
- дополнительные средства, позволяющие облегчить и ускорить выбор одной PICC из нескольких PICC на основании критерия применения;
- дополнительные возможности, позволяющие терминальному оборудованию попеременно переключаться между функциями PICC и PCD, чтобы устанавливать связь с PCD или PICC соответственно. Устройство, которое реализует эти возможности, называется PXD и должно соответствовать всем требованиям к PXD, установленным в настоящем стандарте. |
Протокол и команды, используемые на верхних уровнях и приложениями, а также после начальной фазы, описаны в ИСО/МЭК 14443-4.
Настоящий стандарт применим к PICC типа А и типа В и PCD (в соответствии с ИСО/МЭК 14443-2*), а также к РХО. |
________________
* Доступ к международным и зарубежным документам, упомянутым здесь и далее по тексту, можно получить, перейдя по ссылке на сайт . - .
Примечание 1 - Часть временных соотношений передачи определена в ИСО/МЭК 14443-2.
Примечание 2 - Методы испытаний для настоящего стандарта определены в ИСО/МЭК 10373-6.
(Измененная редакция, Изм. N 1).
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие международные стандарты.* Для датированных ссылок следует использовать только указанное издание, для недатированных ссылок следует использовать последнее издание указанного документа, включая все поправки:
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ИСО/МЭК 13239 Информационная технология. Передача данных и обмен информацией между системами. Процедуры управления звеном данных верхнего уровня (HDLC) (ISO/IEC 13239, Information technology - Telecommunications and information exchange between systems - High-level data link control (HDLC) procedures)
ИСО/МЭК 7816-4:2005![]() Карты идентификационные. Карты на интегральных схемах. Часть 4. Организация, защита и команды для обмена (ISO/IEC 7816-4:2005, Identification cards - Integrated circuit cards - Part 4: Organization, security and commands for interchange)
Карты идентификационные. Карты на интегральных схемах. Часть 4. Организация, защита и команды для обмена (ISO/IEC 7816-4:2005, Identification cards - Integrated circuit cards - Part 4: Organization, security and commands for interchange)
_______________![]() Отменен. Действует ИСО/МЭК 7816-4:2013.
Отменен. Действует ИСО/МЭК 7816-4:2013.
ИСО/МЭК 7816-6 Карты идентификационные. Карты на интегральных схемах. Часть 6. Межотраслевые элементы данных для обмена (ISO/IEC 7816-6, Identification cards - Integrated circuit cards - Part 6: Interindustry data elements for interchange)
ИСО/МЭК 14443-2 Карты идентификационные. Карты на интегральных схемах бесконтактные. Карты близкого действия. Часть 2. Радиочастотный энергетический и сигнальный интерфейс (ISO/IEC 14443-2, Identification cards - Contactless integrated circuit cards - Proximity cards - Part 2: Radio frequency power and signal interface)
ИСО/МЭК 14443-4 Карты идентификационные. Карты на интегральных схемах бесконтактные. Карты близкого действия. Часть 4. Протокол передачи (ISO/IEC 14443-4, Identification cards - Contactless integrated circuit cards - Proximity cards - Part 4: Transmission protocol)
3 Термины и определения
В настоящем стандарте применены термины по ИСО/МЭК 14443-2, а также следующие термины с соответствующими определениями:
3.1 цикл антиколлизии (anticollision loop): Алгоритм, используемый для подготовки диалога между PCD и одной или несколькими PICC из общего числа PICC, отвечающих на команду запроса.
3.2 байт (byte): Байт, состоящий из 8 бит данных, обозначенных от b8 до b1, от старшего значащего бита (MSB, b8) до младшего значащего бита (LSB, b1).
3.3 коллизия (collision): Передача данных между двумя PICC в одном и том же возбужденном поле PCD и во время одного периода времени, при которой PCD не может различить от какой PICC исходят данные.
3.4 кадр (frame): Последовательность бит данных и дополнительные биты обнаружения ошибок с разграничителем в начале и конце.
3.5 протокол верхнего уровня (higher layer protocol): Уровень протокола, не описанный в настоящем стандарте, использующий уровень протокола, который определен в настоящем стандарте, для передачи информации, относящейся к приложению или к верхним уровням протокола, не описанным в настоящем стандарте.
3.6* команда запроса (request command): Команда, запрашивающая PICC соответствующих типов для ответа, если они доступны для инициализации.
________________
* В ИСО/МЭК 14443-3 после внесения Изм.А3:2014 у данного термина порядковый номер "3.8".
(Измененная редакция, Изм. N 1).
3.7 режим PICC (PICC mode): Режим, при котором PXD работает как PICC. |
________________
** В ИСО/МЭК 14443-3 после внесения Изм.А3:2014 у данного термина порядковый номер "3.6".
3.7, 3.8 (Введены дополнительно, Изм. N 1).
4 Обозначения и сокращения
В настоящем стандарте применены следующие обозначения и сокращения:
ADC - кодирование данных приложения, тип В (Application Data Coding, Туре В);
AFI - идентификатор семейства приложений, критерий предварительного выбора карты приложением, тип В (Application Family Identifier);
APf - префикс f антиколлизии, используемый в REQB/WUPB, тип В;
АРn - префикс n антиколлизии, используемый в команде Slot-MARKER, тип В;
ATQA - Ответ на Запрос, тип A (Answer То reQuest, Туре А);
ATQB - Ответ на Запрос, тип В (Answer То reQuest, Туре В);
ATTRIB - команда выбора PICC, тип В (PICC selection command, Туре В);
BCC - символ контроля блока (контрольный байт UID CLn) (Block Check Character), тип A;
CID - идентификатор карты (Card Identifier);
CLn - каскадный уровень n, тип A (Cascade Level n);
CT - каскадный тег, тип A (Cascade Tag);
CRC_A - код обнаружения ошибок с помощью циклического контроля избыточности, тип А;
CRC_B - код обнаружения ошибок с помощью циклического контроля избыточности, тип В;
D - делитель (Divisor);
Е - конец передачи, тип A (End of communication);
EGT - дополнительный разграничительный интервал, тип В (Extra Guard Time);
EOF - конец кадра, тип В (End Of Frame);
etu - элементарная единица времени (elementary time unit);
FDT - время задержки кадра от PCD к PICC, тип A (Frame Delay Time);
fc - частота несущей (carrier frequency);
FO - опция кадра, тип В (Frame Option);
fs - частота поднесущей (subcarrier frequency);
FWI - время ожидания кадра, целое число (Frame Waiting time Integer);
FWT - время ожидания кадра (Frame Waiting Time);
HLTA - команда HaLT, тип A;
HLTB - команда HaLT, тип В;
ID - идентификационный номер, тип A (IDentification number);
INF - информационное поле, принадлежащее верхнему уровню, тип В;
LSB - младший значащий бит (Least Significant Bit);
MBL - максимальная длина буфера, тип В (Maximum Buffer Length, Туре В);
MBLI - коэффициент максимальной длины буфера, тип В (Maximum Buffer Length Index);
MSB - старший значащий бит (Most Significant Bit);
N - число слотов антиколлизии, тип В;
n - переменное целочисленное значение, определенное в специальном разделе;
NAD - байт с адресами узлов (Node Address);
NVB - число допустимых бит, тип A (Number of Valid Bits);
P - бит контроля по нечетности, тип A (Odd Parity bit);
PCD - терминальное оборудование близкого действия (Proximity Coupling Device);
PICC - карта или объект близкого действия (Proximity Card or object);
PUPI - псевдоуникальный идентификатор PICC, тип В (Pseudo-Unique PICC Identifier);
PXD - терминальное оборудование близкого действия с расширенными функциями (Proximity eXtended Device); |
R - число слотов, выбираемых PICC во время последовательности антиколлизии, тип В;
REQA - команда запроса REQuest, тип А;
REQB - команда запроса REQuest, тип В;
RFU - зарезервировано для использования в будущем ИСО/МЭК (Reserved for Future Use by ISO/IEC);
S - старт передачи, тип A;
SAK - выбор AcKnowledge, тип A;
SEL - код SELect, тип A;
SELECT - команда SELECT, тип A;
SFGI - запуск разграничительного интервала кадра, целое число (Start-up Frame Guard time Integer);
SFGT - запуск разграничительного интервала кадра (Start-up Frame Guard Time);
SOF - начало кадра, тип В (Start Of Frame);
|
|
(Измененная редакция, Изм. A1).
TR0 - разграничительный интервал по ИСО/МЭК 14443-2, тип В;
TR1 - время синхронизации по ИСО/МЭК 14443-2, тип В;
TR2 - время задержки кадра от PICC к PCD, тип В;
UID - уникальный идентификатор, тип A (Unique Identifier);
UID CLn - уникальный идентификатор CLn, тип A (Unique IDentifier of CLn);
uidn - число байтов n уникального идентификатора, ![]() 0;
0;
WUPA - команда Wake-UP, тип A;
WUPB - команда Wake-UP, тип В;
(xxxxx)b - представление бит информации;
'XY' - представление чисел в шестнадцатеричной системе счисления (равно XY по основанию 16).
(Измененная редакция, Изм. N 1).
5 Начальные диалоги
5.1 Чередование поддержки PICC и PCD (PXD)
Терминальное оборудование PXD должно попеременно поддерживать требования, предъявляемые к PICC (режим PICC), и требования, предъявляемые к PCD (режим PCD). |
5.2 Чередование команд типа А и типа В
5.2.1 Процедуры опроса
Для того чтобы обнаружить PICC, которые находятся в рабочем поле, PCD должно отправить повторяющиеся команды запроса (Request). PCD должно отправить команды REQA (или WUPA) и REQB (или WUPB) в любой последовательности, используя одинаковую или настраиваемую продолжительность включения при опросе типа А и типа В. Кроме того, PCD может послать команды в соответствии с приложением С.
Если на PICC воздействует немодулированное рабочее поле (см. ИСО/МЭК 14443-2), она должна быть в состоянии принять команду запроса в течение 5 мс.
Пример 1 - Если PICC типа А получает какую-либо команду типа В, то она должна быть в состоянии принять команду REQA (или WUPA) в течение 5 мс немодулированного рабочего поля.
Пример 2 - Если PICC типа В получает какую-либо команду типа А, то она должна быть в состоянии принять команду REQB (или WUPB) в течение 5 мс немодулированного рабочего поля.
Пример 3 - Если на PICC типа А воздействует поле активации, то она должна быть в состоянии принять команду REQA (или WUPA) в течение 5 мс немодулированного рабочего поля.
Пример 4 - Если на PICC типа В воздействует поле активации, то она должна быть в состоянии принять команду REQB (или WUPB) в течение 5 мс немодулированного рабочего поля.
Пример 5 - Если на PICC, поддерживающую тип А и тип В, воздействует поле активации, то она должна быть в состоянии принять команду REQA (или WUPA) в течение 5 мс немодулированного рабочего поля. |
(Введены дополнительно, Изм.А3:2014).
Примечание 1 - Для того чтобы обнаружить PICC, принимающие запрос в течение 5 мс, PCD должно обеспечивать немодулированное поле продолжительностью не менее 5,1 мс (перед началом команд запроса (Request) типа А и типа В). PCD может выполнять опрос быстрее, так как PICC может быстрее реагировать.
Если PICC поддерживает тип А и тип В, то она должна быть заблокирована в типе команды запроса, обработанной первой (после ответа на запрос одного типа другой тип запрещен до вхождения PICC в состояние POWER-OFF). |
(Введены дополнительно, Изм.А3:2014).
5.2.2 Воздействие команд типа А на работу PICC типа В
PICC типа В должна либо перейти в состояние IDLE (быть в состоянии принять команду REQB), либо быть способной продолжать текущую транзакцию после получения любой команды типа А.
5.2.3 Воздействие команд типа В на работу PICC типа А
PICC типа А должна либо перейти в состояние IDLE (быть в состоянии принять команду REQA), либо быть способной продолжать текущую транзакцию после получения любой команды типа В.
5.2.4 Переход в состояние POWER-OFF
PICC должна быть в состоянии POWER-OFF не позднее чем через 5 мс после выключения рабочего поля.
Раздел 5 (Измененная редакция, Изм. N 1).
6 Тип А - инициализация и антиколлизия
В данном разделе описаны последовательности инициализации и антиколлизии, применяемые для PICC типа А.
PICC или PCD, посылающие RFU-биты, должны установить эти биты на значение, указанное в настоящем стандарте, или на (0)b, если значение не указано. PICC или PCD, получающие RFU-биты, должны игнорировать значения этих бит и сохранять свои функции, если явно не указано иное.
6.1 Etu
| |||
Скорость передачи | etu | ||
fc/128 | 128/fc | ||
fc/64 | 128/2fc | ||
fc/32 | 128/4fc | ||
fc/16 | 128/8fc | ||
fc/8 | 128/16fc | ||
fc/4 | 128/32fc | ||
fc/2 | 128/64fc | ||
|
Значения etu для скоростей передачи 3 |
(Введен дополнительно, Изм.А6:2014)
(Измененная редакция, Изм. N 1).
6.2 Формат кадра и синхронизация
В данном разделе определены формат кадра и синхронизация, используемые во время передачи данных при инициализации коммуникации и антиколлизии. Представление бит и кодирование описано в ИСО/МЭК 14443-2.
Кадры должны передаваться парами (от PCD к PICC, затем от PICC к PCD), используя следующую последовательность:
- кадр PCD:
- старт передачи PCD;
- информация и, при необходимости, биты обнаружения ошибки, посылаемые PCD;
- конец передачи PCD;
- время задержки кадра от PCD к PICC;
- кадр PICC:
- старт передачи PICC;
- информация и, при необходимости, биты обнаружения ошибки, посылаемые PICC;
- конец передачи PICC;
- время задержки кадра от PICC к PCD.
Примечание - Время задержки кадра (FDT) от PCD к PICC совпадает с концом передачи PCD.
6.2.1 Время задержки кадра
Время задержки кадра определяется как промежуток времени между двумя кадрами, передаваемыми в противоположных направлениях.
6.2.1.1 Время задержки кадра от PCD к PICC
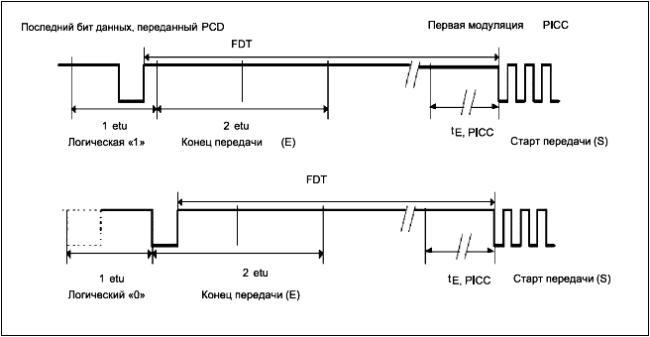
Время задержки кадра от PCD к PICC (FDT) - это время между концом последней паузы, передаваемой PCD, и первым фронтом модуляции в пределах стартового бита, передаваемого PICC. FDT должно соответствовать рисунку 1 и таблице 2.
При скоростях передачи данных fc/8, fc/4 и fc/2 FDT начинается в конце последней модуляции, передаваемой PCD. |
(Измененная редакция, Изм. А2).
FDT для скоростей передачи 3 |
(Введен дополнительно, Изм.А6:2014)
В таблице 2 приведены значения n и FDT в зависимости от типа команды и логического состояния последнего передаваемого бита данных в этой команде.
Примечание - ![]() определено в разделе 8.
определено в разделе 8.
(Измененная редакция, Изм. N 1).
Рисунок 1 - Время задержки кадра от PCD к PICC при скорости передачи свыше fc/16
|
(Измененная редакция, Изм. А1).
Рисунок 1 - Время задержки кадра от PCD к PICC при скорости передачи свыше fc/16 |
(Измененная редакция, Изм. А2).
Таблица 2 - Время задержки кадра от PCD к PICC
Тип команды |
| FDT | ||||
Последний бит = (1)b | Последний бит = (0)b | |||||
REQA | 9 |
|
| |||
WUPA | ||||||
ANTICOLLISION | ||||||
SELECT | ||||||
Все другие команды при скоростях передачи | ||||||
От PCD к PICC | От PICC к PCD | |||||
|
|
|
|
| ||
|
|
|
| |||
|
|
|
| |||
|
|
|
| |||
|
| Не применяется |
|
| ||
Для антиколлизии все PICC, находящиеся в поле, должны ответить синхронно на команды: REQA, WUPA, ANTICOLLISION и SELECT. |
(Измененная редакция, Изм.А2:2012 и А6:2014)
Таблица 2 (Измененная редакция, Изм. N 1).
Примечание - Если для передачи от PCD к PICC выбрана скорость передачи свыше fc/16, то скорость передачи fc/128 не разрешена для передачи от PICC к PCD (см. ИСО/МЭК 14443-4:2008/Amd.2). Данное ограничение требуется, так как необходимая точность FDT не определена для кодирования NRZ |
Измеренное FDT должно быть в пределах значений, указанных в таблице 2, и значений, указанных в таблице 2+0,4 мкс.
Примечание - PCD должно принять ответ с допуском FDT от -1/fc до (+0,4 мкс +1/fc).
6.2.1.2 Время задержки кадра от PICC к PCD
Время задержки кадра от PICC к PCD - это время между последней модуляцией, переданной PICC, и первой модуляцией, переданной PCD, и оно должно быть не менее 1172/fc. |
(Измененная редакция, Изм. А2).
Примечание - Для повышения совместимости рекомендуется, чтобы дополнительное время ожидания 10/fc было включено в операции PCD.
6.2.2 Разграничительный интервал запроса
Разграничительный интервал запроса (Request Guard Time) определяется как минимальное время между стартовыми битами двух последовательных команд REQA или WUPA. Он имеет значение 7000/fc.
Примечание - Для повышения совместимости рекомендуется, чтобы дополнительное время ожидания 100/fc было включено в операции PCD.
6.2.3 Форматы кадров
В настоящем стандарте определены следующие форматы кадров:
- короткий кадр;
- стандартный кадр;
- бит-ориентированный кадр антиколлизии;
- стандартный кадр PCD при скоростях передачи fc/8, fc/4 и fc/2. |
(Измененная редакция, Изм. А2).
6.2.3.1 Короткий кадр
Короткий кадр используется для инициирования передачи и состоит из следующих компонентов в том порядке, как показано на рисунке 2:
- старт передачи;
- 7 бит данных, передаваемых начиная с LSB (для кодирования см. таблицу 3);
- конец передачи.
Бит контроля четности не добавляется.
Рисунок 2 - Короткий кадр
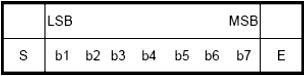
Рисунок 2 - Короткий кадр
6.2.3.2 Стандартный кадр
6.2.3.2.1 Стандартный кадр PCD при скоростях передачи fc/128, fc/64, fc/32 и fc/16 и стандартный кадр PICC |
(Измененная редакция, Изм. А2).
Стандартные кадры используются для обмена данными и состоят из компонентов в следующем порядке:
- старт передачи;
- n·(8 бит данных + нечетный бит контроля четности), где ![]() 1. LSB каждого байта передается первым. За каждым байтом следует бит отрицательной четности. Бит контроля четности Р устанавливается таким образом, чтобы число единиц было нечетно в битах (от b1 до b8, Р);
1. LSB каждого байта передается первым. За каждым байтом следует бит отрицательной четности. Бит контроля четности Р устанавливается таким образом, чтобы число единиц было нечетно в битах (от b1 до b8, Р);
- конец передачи.
Стандартный кадр PCD при скоростях передачи fc/128, fc/64, fc/32 и fc/16 показан на рисунке 3. |
(Измененная редакция, Изм. А2).
Рисунок 3 - Стандартный кадр PCD при скоростях передачи fc/128, fc/64, fc/32 и fc/16

Рисунок 3 - Стандартный кадр PCD при скоростях передачи fc/128, fc/64, fc/32 и fc/16 |
В виде исключения последний бит контроля четности стандартного кадра PICC должен быть инвертирован, если этот кадр передается со скоростью передачи свыше fc/128. Стандартные кадры PICC показаны на рисунке 4. |
Стандартные кадры PICC при скорости передачи данных fc/128
Рисунок 4 - Стандартные кадры PICC при скорости передачи свыше fc/128
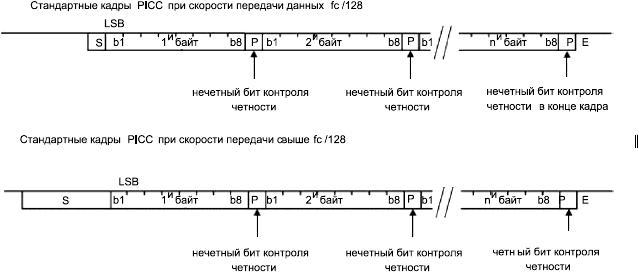
Рисунок 4 - Стандартные кадры PICC при скорости передачи свыше fc/128 |
6.2.3.2.2 Стандартный кадр PCD при скоростях передачи fc/8, fc/4 и fc/2 |
6.2.3.2.3 Стандартный кадр PCD при скоростях передачи 3 |
(Введен дополнительно, Изм. N 1).
6.2.3.3 Бит-ориентированный кадр антиколлизии
В PCD должны быть предусмотрены средства для обнаружения коллизии, которая происходит, когда не менее двух PICC одновременно передают конфигурацию бит с одной или более позиций бит, в которых не менее двух PICC должны передавать дополнительные значения. В этом случае конфигурации бит соединяются и несущая модулируется поднесущей для всей (100%) длительности бита (см. ИСО/МЭК 14443-2, 8.2.5.1).
Бит-ориентированные кадры антиколлизии должны использоваться только в течение циклов биткадровой антиколлизии. Они представляют собой стандартные кадры длиной 7 байт, разбитые на две части:
- часть 1 - для передачи от PCD к PICC;
- часть 2 - для передачи от PICC к PCD.
Для длин частей 1 и 2 применяются следующие правила:
- правило 1: сумма бит данных должна быть 56;
- правило 2: минимальная длина части 1 должна быть 16 бит данных;
- правило 3: максимальная длина части 1 должна быть 48 бит данных.
Следовательно, минимальная длина части 2 составляет 8 бит данных, а максимальная длина должна быть 40 бит данных.
Разбиение кадра может произойти в любой позиции бита в пределах байта. Могут быть определены два случая:
- случай FULL BYTE: разбиение после полного байта. Бит контроля четности добавляется после последнего бита данных из части 1;
- случай SPLIT BYTE: разбиение внутри байта. Бит контроля четности не добавляется после последнего бита данных из части 1.
Символ контроля блока (ВСС) вычисляется как исключающее ИЛИ над предыдущими 4 байтами.
На рисунках 5 и 6 показаны организация бит и порядок передачи бит для случаев FULL BYTE и SPLIT BYTE.
Примечание - На рисунках 5 и 6 определены соответствующие значения для NVB и ВСС.
Рисунок 5 - Организация бит и передача бит-ориентированного кадра антиколлизии, случай FULL BYTE
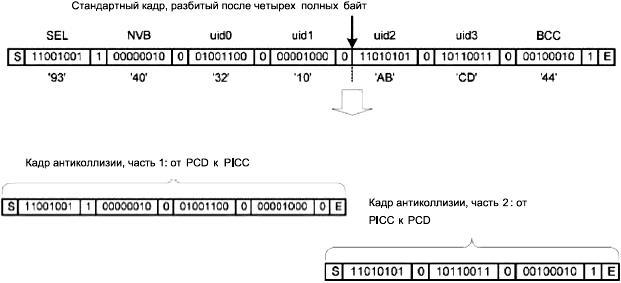
Рисунок 5 - Организация бит и передача бит-ориентированного кадра антиколлизии, случай FULL BYTE
Рисунок 6 - Организация бит и передача бит-ориентированного кадра антиколлизии, случай SPLIT BYTE
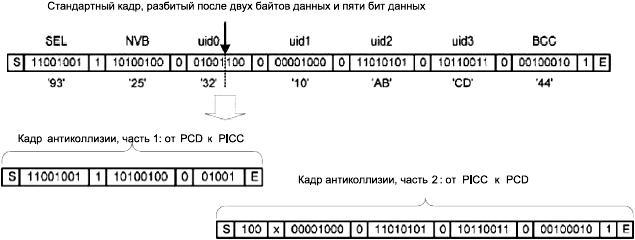
Рисунок 6 - Организация бит и передача бит-ориентированного кадра антиколлизии, случай SPLIT BYTE
Для случая SPLIT BYTE первый бит контроля четности для части 2 должен игнорироваться PCD.
6.2.4 CRC_A
Кадр, который включает CRC_A, должен считаться корректным, только если он получен с допустимым значением CRC_A .
Кадр CRC_A является функцией k бит данных, которые состоят из всех бит данных в кадре, за исключением бита контроля четности, S, Е и самого CRC_A. Поскольку данные кодируются в байтах, количество бит k кратно 8.
Для выявления ошибок посылаются два байта CRC_A в стандартном кадре после байтов и перед Е. CRC_A - в соответствии с ИСО/МЭК 13239, а начальное содержание регистра должно быть '6363', и оно не должно меняться после расчета.
Примеры кодирования CRC_A приведены в приложении В.
6.3 Состояния PICC
В нижеперечисленных пунктах приведены описания состояний PICC типа А, специфичных для последовательности антиколлизии.
На диаграмме состояния, показанной на рисунке 7, определены все возможные переходы состояний, вызванные командами, в соответствии с настоящим стандартом. PICC должны реагировать только на допустимые полученные кадры. Ответ не должен отправляться, если будут обнаружены ошибки передачи, за исключением тех случаев, когда PICC находятся в состоянии ACTIVE или ACTIVE*.
На диаграмме состояний, показанной на рисунке 7, применяются следующие обозначения:
АС - команда ANTICOLLISION (согласованный UID);
nАС - команда ANTICOLLISION (несогласованный UID);
SELECT - команда SELECT (согласованный UID);
nSELECT - команды SELECT (несогласованный UID);
RATS - команда RATS по ИСО/МЭК 14443-4;
DESELECT - команда DESELECT по ИСО/МЭК 14443-4;
Error - обнаруженная ошибка передачи или непредвиденный кадр.
Рисунок 7 - Диаграмма состояний PICC типа А
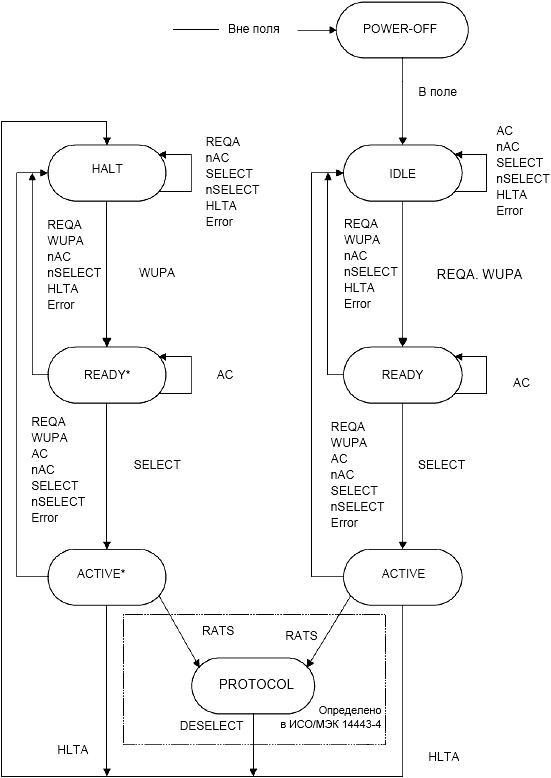
Рисунок 7 - Диаграмма состояний PICC типа А
PICC, соответствующие настоящему стандарту, но не выбранные командой RATS по ИСО/МЭК 14443-4, могут быть переведены из состояния ACTIVE или ACTIVE* проприетарными командами.
6.3.1 Состояние POWER-OFF
Описание:
В состоянии POWER-OFF на PICC не подается питание от рабочего поля PCD.
Условия выхода из состояния и переходы:
Если PICC находится в возбужденном магнитном поле свыше ![]() (см. ИСО/МЭК 14443-2), то она входит в свое состояние IDLE в течение задержки, значение которой не превышает значения, определенного в разделе 5 настоящего стандарта.
(см. ИСО/МЭК 14443-2), то она входит в свое состояние IDLE в течение задержки, значение которой не превышает значения, определенного в разделе 5 настоящего стандарта.
6.3.2 Состояние IDLE
Описание:
В состоянии IDLE на PICC подается питание. Сначала она ожидает команды, а затем может распознавать команды REQA и WUPA.
Условия выхода из состояния и переходы:
PICC перейдет в состояние READY после того, как она получит допустимую команду REQA или WUPA и передаст свой ATQA .
6.3.3 Состояние READY
Описание:
В состоянии READY должен применяться метод биткадровой антиколлизии. Для того чтобы получить полный UID, внутри этого состояния обрабатываются каскадные уровни.
Условия выхода из состояния и переходы:
PICC переходит в состояние ACTIVE, если она выбрана со своим полным UID.
6.3.4 Состояние ACTIVE
Описание:
Если PICC соответствует ИСО/МЭК 14443-4, то она должна быть готова принять команду активации протокола (RATS), как указано в ИСО/МЭК 14443-4, иначе она может продолжить работу с протоколом, не соответствующим ИСО/МЭК 14443-4.
Условия выхода из состояния и переходы:
PICC переходит в состояние HALT, когда получена допустимая команда HLTA.
Примечание - В протоколе верхнего уровня могут быть определены специфичные команды, для того чтобы вернуть PICC в состояние HALT.
6.3.5 Состояние HALT
Описание:
В состоянии HALT PICC должна отвечать только на команду WUPA.
Условия выхода из состояния и переходы:
PICC переходит в состояние READY* после того, как она получит допустимую команду WUPA и передаст свой ATQA.
6.3.6 Состояние READY*
Описание:
Состояние READY* похоже на состояние READY. Различиями являются переходы, указанные на рисунке 7. Должен применяться метод биткадровой антиколлизии. Для того чтобы получить полный UID, внутри этого состояния обрабатываются каскадные уровни.
Условия выхода из состояния и переходы:
PICC переходит в состояние READY*, если она выбрана со своим полным UID.
6.3.7 Состояние ACTIVE*
Описание:
Состояние ACTIVE* похоже на состояние ACTIVE. Различиями являются переходы, указанные на рисунке 7. Если PICC соответствует ИСО/МЭК 14443-4, то PICC должна быть готова принять команду активации протокола (RATS) в соответствии с ИСО/МЭК 14443-4, иначе она может продолжить работу с протоколом, не соответствующим ИСО/МЭК 14443-4.
Условия выхода из состояния и переходы:
PICC переходит в состояние HALT, когда получена допустимая команда HLTA.
6.3.8 Состояние PROTOCOL
Описание:
В состоянии PROTOCOL PICC ведет себя в соответствии с ИСО/МЭК 14443-4.
6.4 Набор команд
Команды, используемые PCD для управления передачей с несколькими PICC:
- REQA;
- WUPA;
- ANTICOLLISION;
- SELECT;
- HLTA.
Команды используют форматы байта и кадра, описанные выше.
6.4.1 Команды REQA и WUPA
Команды REQA и WUPA посылаются PCD для исследования поля PICC типа А. Они передаются в течение короткого кадра. На рисунке 7 показано в каких случаях PICC нужно ответить на эти команды.
В частности, команда WUPA посылается PCD, чтобы перевести PICC, которые вошли в состояние HALT, обратно в состояние READY*. Затем они должны участвовать в процедурах антиколлизии и выбора.
В таблице 3 показано кодирование команд REQA и WUPA, которые используют формат короткого кадра.
Таблица 3 - Кодирование короткого кадра
b7 | b6 | b5 | b4 | b3 | b2 | b1 | Значение |
0 | 1 | 0 | 0 | 1 | 1 | 0 | '26' = REQA |
1 | 0 | 1 | 0 | 0 | 1 | 0 | '52' = WUPA |
0 | 1 | 1 | 0 | 1 | 0 | 1 | '35' = Метод дополнительного таймслота, см. приложение С |
1 | 0 | 0 | x | x | x | x | От '40' до '4F' = Проприетарный |
1 | 1 | 1 | 1 | x | x | x | От '78' до '7F' = Проприетарный |
Все остальные значения | RFU |
PCD, посылающее RFU-значение, не соответствует требованием настоящего стандарта.
PICC, принимающая RFU-значение, должна считать короткий кадр ошибкой (см. рисунок 7) и не должна отправлять ответ.
6.4.2 Команды ANTICOLLISION и SELECT
Данные команды используются во время цикла антиколлизии (см. рисунки 5 и 6).
Команды ANTICOLLISION и SELECT состоят из:
- кода выбора SEL (1 байт);
- числа допустимых бит NVB (1 байт, для кодирования см. таблицу 8);
- бит данных от 0 до 40 UID CLn согласно значению NVB.
Примечание - Состав UID CLn для различных размеров UID показан на рисунке 12.
SEL определяет каскадный уровень CLn.
Команда ANTICOLLISION передается в бит-ориентированном кадре антиколлизии.
Команда SELECT передается в стандартном кадре.
Пока NVB не определит 40 допустимых бит, команда называется командой ANTICOLLISION, при которой PICC остается в состоянии READY или READY*.
Если NVB определило 40 бит данных UID CLn (NVB='70'), то должен быть присоединен CRC_A. Эта команда называется командой SELECT.
Если PICC передала полный UID, то она переходит из состояния READY в состояние ACTIVE или из состояния READY* в состояние ACTIVE* и указывает в своем ответе SAK, что UID полный.
В противном случае PICC остается в состоянии READY или READY* и PCD должно инициировать новый цикл антиколлизии с повышенным уровнем каскада.
6.4.3 Команда HLTA
Команда HLTA состоит из двух байтов, за которыми следует CRC_A, и должна передаваться в стандартном кадре, представленном на рисунке 8.
Рисунок 8 - Стандартный кадр, содержащий команду HLTA
![]()
Рисунок 8 - Стандартный кадр, содержащий команду HLTA
Если PICC отвечает какой-либо модуляцией в течение 1 мс после конца кадра, содержащего команду HLTA, то этот ответ должен интерпретироваться как "не подтвержденный".
Примечание - PCD должно применить дополнительный интервал времени ожидания 0,1 мс.
6.5 Последовательность выбора
Целями последовательности выбора являются получение UID от одной PICC и использование этой PICC для дальнейшей передачи.
6.5.1 Блок-схема последовательности выбора
Последовательность выбора показана на рисунке 9.
Рисунок 9 - Блок-схема инициализации и антиколлизии для PCD
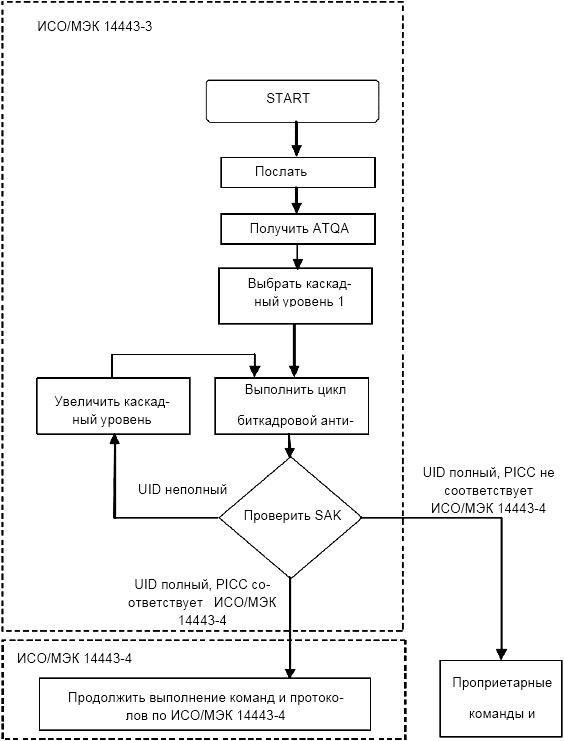
Рисунок 9 - Блок-схема инициализации и антиколлизии для PCD
Примечание - PICC могут использовать комбинации бит ATQA от b9 до b12 для индикации проприетарных методов.
PICC, которые не поддерживают обязательную биткадровую антиколлизию, не соответствуют требованиям настоящего стандарта.
6.5.2 ATQA - Ответ на Запрос
После передачи PCD команды REQA, все PICC, находящиеся в состоянии IDLE, должны синхронно ответить ATQA.
После передачи PCD команды WUPA, все PICC, находящиеся в состоянии IDLE или HALT, должны синхронно ответить ATQA.
PCD должно обнаруживать любую коллизию, которая может возникнуть, если отвечают несколько PICC.
Пример приведен в приложении А.
6.5.2.1 Кодирование ATQA
В таблице 4 показано кодирование ATQA. Все RFU-биты должны быть установлены на (0)b.
Таблица 4 - Кодирование ATQA
MSB | LSB | ||||||||||||||
b16 | b15 | b14 | b13 | b12 | b11 | b10 | b9 | b8 | b7 | b6 | b5 | b4 | b3 | b2 | b1 |
RFU | Проприетарное кодирование | Кадр бита для размера UID | RFU | Биткадровая антиколлизия |
PICC должна послать первым байт, состоящий из бит (от b1 до b8), а затем байт, состоящий из бит (от b9 до b16), в стандартном кадре.
PICC, посылающая ATQA с (b8, b7) = (11)b или (биты от b16 до b13) <> (0000)b или b6 <> (0)b, не соответствует требованиям настоящего стандарта.
PCD, которое обнаружило коллизию в каком-либо бите (от b16 до b1), должно начать работу с первого шага цикла антиколлизии (см. 6.5.3.1). PCD должно начать работу с первого шага цикла антиколлизии независимо от значений b12-b9 в проприетарном поле.
PCD, которое получило (b8, b7) = (11)b или биты (от b16 до b13) <> (0000)b или b6 <> (0)b, должно игнорировать их значения и начинать работу с первого шага цикла антиколлизии (см. 6.5.3.1).
6.5.2.2 Правила кодирования для биткадровой антиколлизии
Правило 1: Биты b7 и b8 кодируют размер UID (одинарный, двойной и тройной, см. таблицу 5).
Правило 2: Только один из пяти бит b1, b2, b3, b4 или b5 должен быть установлен на (1)b для указания биткадровой антиколлизии (см. таблицу 6).
Таблица 5 - Кодирование для биткадровой антиколлизии от b7 до b8
b8 | b7 | Значение |
0 | 0 | Размер UID: одинарный |
0 | 1 | Размер UID: двойной |
1 | 0 | Размер UID: тройной |
1 | 1 | RFU |
Таблица 6 - Кодирование для биткадровой антиколлизии от b1 до b5
b5 | b4 | b3 | b2 | b1 | Значение |
1 | 0 | 0 | 0 | 0 | Биткадровая антиколлизия |
0 | 1 | 0 | 0 | 0 | Биткадровая антиколлизия |
0 | 0 | 1 | 0 | 0 | Биткадровая антиколлизия |
0 | 0 | 0 | 1 | 0 | Биткадровая антиколлизия |
0 | 0 | 0 | 0 | 1 | Биткадровая антиколлизия |
6.5.3 Антиколлизия и Выбор
6.5.3.1 Цикл антиколлизии в пределах каскадного уровня
К циклу антиколлизии должен применяться следующий алгоритм:
Шаг 1 | PCD присваивает SEL, равный коду выбранного каскадного уровня антиколлизии |
Шаг 2 | PCD присваивает NVB значение '20'. |
Шаг 3 | PCD предает SEL и NVB. |
Шаг 4 | Все PICC, находящиеся в поле, должны дать ответ с их полным UID CLn. |
Шаг 5 | Если ответ дает более чем одна PICC, то может произойти коллизия. Если коллизии не происходит, то шаги с 6 по 10 пропускают. |
Шаг 6 | PCD должно определить позицию первой коллизии. |
Шаг 7 | PCD присваивает NVB значение, которое определяет количество допустимых бит в UID CLn. Допустимые биты должны быть частью UID CLn, которая была получена до того, как произошла коллизия с последующим битом (0)b или (1)b, который определен устройством PCD. Типичная реализация добавляет (1)b. |
Шаг 8 | PCD должно передать SEL и NVB, а затем допустимые биты. |
Шаг 9 | Только PICC, у которых часть UID CLn равна допустимым битам, передаваемым устройством PCD, должны передавать свои оставшиеся биты UID CLn. |
Шаг 10 | Если далее происходит коллизия, то необходимо повторить шаги с 6 по 9. Максимальное количество циклов равно 32. |
Шаг 11 | Если далее коллизия не происходит, то PCD должно присвоить NVB значение '70'. |
Шаг 12 | PCD должно передать SEL и NVB, потом все 40 бит UID CLn, а затем CRC_A. |
Шаг 13 | PICC, у которых UID CLn согласован с 40 битами, должны дать ответ своим SAK. |
Шаг 14 | Если UID полный, то PICC должна передать SAK с освобожденным каскадным битом и перейти из состояния READY в состояние ACTIVE или из состояния READY* в состояние ACTIVE*. |
Шаг 15 | PCD должно проверить установлен ли каскадный бит в SAK и должны ли последовать далее циклы антиколлизии с увеличением каскадного уровня. |
Если UID PICC является полным и известным для PCD, то PCD может пропустить шаги с 2 по 10 для выбора этой PICC без выполнения цикла антиколлизии.
Примечание - На рисунке 10 показаны шаги с 1 по 13.
Рисунок 10 - Блок-схема цикла антиколлизии для PCD
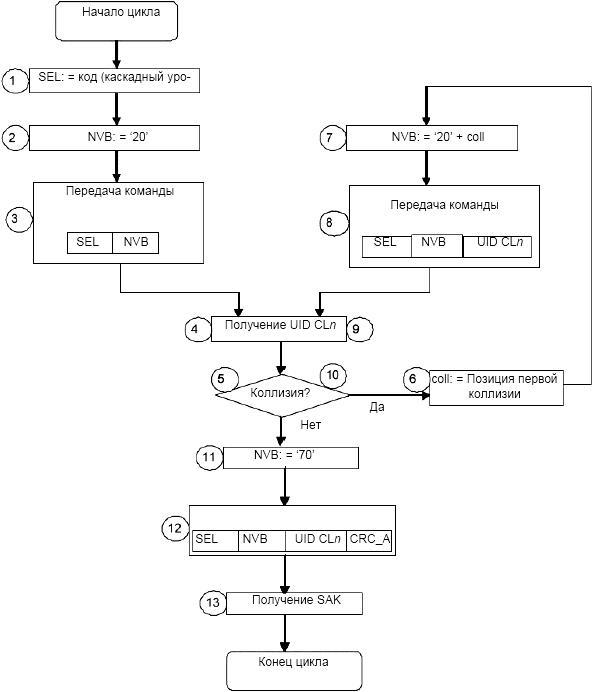
Рисунок 10 - Блок-схема цикла антиколлизии для PCD
Примечание - Номера в кружочках соответствуют шагам алгоритма.
6.5.3.2 Кодирование SEL (код выбора)
В таблице 7 приведено кодирование SEL.
Таблица 7 - Кодирование SEL
b8 | b7 | b6 | b5 | b4 | b3 | b2 | b1 | Значение |
1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | '93': выбран каскадный уровень 1 |
1 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | '95': выбран каскадный уровень 2 |
1 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | '97': выбран каскадный уровень 3 |
1 | 0 | 0 | 1 | Другие значения, за исключением тех, что выше | RFU |
Длина SEL - 1 байт. Возможные значения - '93', '95', '97'.
Примечание - Определены только три кодирования SEL, а при неопределенном кодировании поведение PICC непредсказуемо.
6.5.3.3 Кодирование NVB (число допустимых бит)
Длина: 1 байт
Старшие 4 бита называются count byte и указывают целую часть числа всех допустимых бит данных, переданных PCD (в том числе SEL и NVB), деленную на 8. Следовательно, минимальное значение byte count равно 2, а максимальное значение - 7.
Младшие 4 бита называются bit count и указывают число всех допустимых бит данных, переданных PCD (в том числе SEL и NVB), по модулю 8.
Таблица 8 - Кодирование NVB
b8 | b7 | b6 | b5 | Значение | b4 | b3 | b2 | b1 | Значение | |
0 | 1 | 0 | Byte count = 2 | 0 | 0 | 0 | 0 | Bit count = 0 | ||
0 | 0 | 1 | 1 | Byte count = 3 | 0 | 0 | 0 | 1 | Bit count = 1 | |
0 | 1 | 0 | 0 | Byte count = 4 | 0 | 0 | 1 | 0 | Bit count = 2 | |
0 | 1 | 0 | 1 | Byte count = 5 | 0 | 0 | 1 | 1 | Bit count = 3 | |
0 | 1 | 1 | 0 | Byte count = 6 | 0 | 1 | 0 | 0 | Bit count = 4 | |
0 | 1 | 1 | 1 | Byte count = 7 | 0 | 1 | 0 | 1 | Bit count = 5 | |
0 | 1 | 1 | 0 | Bit count = 6 | ||||||
0 | 1 | 1 | 1 | Bit count = 7 |
PCD должно установить NVB только на значения, определенные в таблице 8. Для byte count, равных 6 и 7, допускается bit count, равное 0. PCD, устанавливающее NVB на любое запрещенное значение, не соответствует требованиям настоящего стандарта.
PCD, устанавливающее byte count (от b8 до b5) на любое значение, выходящее за пределы от 2 до 7, не соответствует требованиям настоящего стандарта. PCD, устанавливающее bit count (от b4 до b1) > 7 для byte count, равных от 2 до 5, или устанавливающее bit count (от b4 до b1) на любое значение, отличное от 0, для byte count, равного 6 или 7, не соответствует требованиям настоящего стандарта.
6.5.3.4 Кодирование SAK (подтверждение выбора)
PICC передает SAK, как показано на рисунке 11, когда NVB определил 40 допустимых бит данных и когда все эти биты данных согласованы с UID CLn.
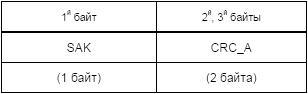
Рисунок 11 - Подтверждение выбора (SAK)
Кодирование битов b3 (каскадный бит) и b6 приведены в таблице 9.
Таблица 9 - Кодирование SAK
b8 | b7 | b6 | b5 | b4 | b3 | b2 | b1 | Значение |
x | x | x | x | x | 1 | x | x | Каскадный набор бит: UID неполный |
x | x | 1 | x | x | 0 | x | x | UID полный, PICC соответствует ИСО/МЭК 14443-4 |
x | x | 0 | x | x | 0 | x | x | UID полный, PICC не соответствует ИСО/МЭК 14443-4 |
"х" - произвольное значение |
Для b3 = (1)b PCD должно игнорировать любые другие биты SAK. Для b3 = (0)b PCD должно интерпретировать b6 и игнорировать любой из оставшихся бит SAK. PCD, которое реагирует по-другому, не соответствует требованиям настоящего стандарта.
Примечание - Если b3 установлен на (1)b, то все остальные биты SAK должны быть установлены на (0)b.
6.5.4 Содержание UID и каскадные уровни
UID состоит из 4, 7 или 10 байт. Следовательно, PICC должна обрабатывать до 3 каскадных уровней, чтобы получить все байты UID. В каждом каскадном уровне часть UID должна быть передана PCD. Соотношение между размером UID (см. таблицу 5), byte count UID и каскадным уровнем приведено в таблице 10.
Таблица 10 - Размер UID
Размер UID | Byte count UID | Каскадный уровень |
Одинарный | 4 | 1 |
Двойной | 7 | 2 |
Тройной | 10 | 3 |
UID представляет собой:
- или уникальное фиксированное число;
- или случайное число, которое динамически генерируется PICC (разрешено только для UID одинарного размера);
- или неуникальное фиксированное число (разрешено только для UID одинарного размера).
Первый байт (uid0) из UID присваивает содержимое следующих байтов UID, как определено в таблицах 11 и 12.
Таблица 11 - UID одинарного размера | |||
uid0 | Описание | ||
'08' | От uid1 до uid3 - случайное число, которое генерируется динамически | ||
'Х0'-'Х7', 'Х9'-'ХЕ', '18', '28', '38', '48', '58', '68', 78', '98', 'А8', 'В8', 'С8', 'D8', 'Е8' | Проприетарное число | ||
'F8' | RFU | ||
'XF' | Фиксированное число, неуникальное |
(Измененная редакция, Изм. А1).
Случайные UID должны генерироваться только в состоянии перехода от состояния POWER-OFF в состояние IDLE.
Значение '88' каскадного тега СТ не должно использоваться для uid0 в UID одинарного размера.
Таблица 12 - UID двойного и тройного размеров
uid0 | Описание |
ID изготовителя в соответствии с ИСО/МЭК 7816-6* | Каждый изготовитель несет ответственность за уникальность значения остальных байтов при помощи уникального номера |
* Значения от '81' до 'FE', которые обозначены как "проприетарные" в ИСО/МЭК 7816-6, не разрешены в данном контексте. |
Значение '88' каскадного тега (СТ) не должно использоваться для uid3 в UID двойного размера.
На рисунке 12 показано использование каскадных уровней.
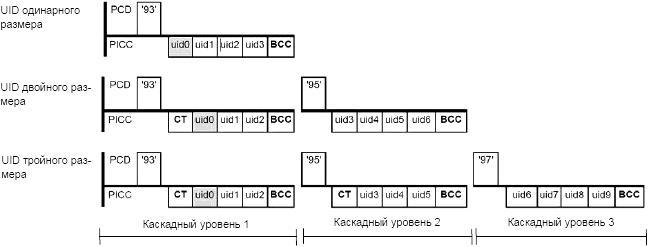
Рисунок 12 - Использование каскадных уровней
Примечание - Целью СТ является воздействие на коллизию с PICC, которые имеют меньший размер UID.
Следующий алгоритм применяется к PCD для получения полного UID:
Шаг 1 | PCD выбирает каскадный уровень 1 |
Шаг 2 | Осуществляется цикл антиколлизии |
Шаг 3 | PCD должен проверить каскадный бит SAK |
Шаг 4 | Если каскадный бит установлен, то PCD должно увеличить каскадный уровень и инициировать новый цикл антиколлизии |
PICC, посылающая uid0 с RFU-значением, не соответствует требованиям настоящего стандарта. PICC, посылающая проприетарное число, должна соответствовать всем остальным требованиям последовательности антиколлизии, в том числе СТ, иначе такая PICC не соответствует требованиям настоящего стандарта.
Во время антиколлизии PCD должно считать uid0 с RFU- или проприетарным значением как допустимый uid0.
7 Тип В - инициализации и антиколлизия
В этом разделе описываются последовательности инициализации и антиколлизии, применяемые для PICC типа В.
PICC или PCD, посылающие RFU-биты, должны устанавливать эти биты на значение, указанное в настоящем стандарте, или на (0)b, если значение не указано. PICC или PCD, получающие RFU-биты, должны игнорировать значения этих бит и сохранять свои функции, если явно не указано иное.
7.1 Знак, формат кадра и синхронизация
В данном подразделе определены знак, формат кадра и синхронизация, используемые во время инициализации передачи и антиколлизии для PICC типа В. Представление бит и кодирование см. в ИСО/МЭК 14443-2.
Etu определена в 6.1. |
(Измененная редакция, Изм. А2).
7.1.1 Формат передачи знака
Байты передаются и принимаются между PICC и PCD с помощью знаков, формат которых в течение последовательности антиколлизии представлен следующим образом:
- 1 стартовый бит при логическом 0;
- 8 бит данных передаются, начиная с LSB;
- 1 стоп-бит при логической 1.
Передача одного байта выполняется со знаком, для которого необходимо 10 etu, как показано на рисунке 13.
Рисунок 13 - Формат знака

Рисунок 13 - Формат знака
Формат передачи знака для скоростей передачи 3 |
Границы бит от PCD к PICC в пределах знака должны быть в соответствии с таблицей 13, где ![]() - число границ бит после заднего фронта стартового бита (1
- число границ бит после заднего фронта стартового бита (1![]() 9).
9).
Таблица 13 - Границы бит от PCD к PICC
Скорость передачи от PCD к PICC | ||||
Границы бит | fc/128 | fc/64 | fc/32 | fc/16 |
От PCD к PICC для заднего(их) фронта(ов) | n etu ±8/fc | n etu ±1/fc | n etu ±1/fc | n etu ±1/fc |
От PCD к PICC для нарастающего(их) фронта(ов) | n etu ±8/fc | n etu ±4/fc | n etu ±2/fc | n etu ±1/fc |
При скоростях передачи свыше fc/16 границы бит должны быть определены при номинальной позиции бит. |
(Измененная редакция, Изм. N 1).
7.1.2 Разделение знака
7.1.2.1 Разделение знака на скоростях передачи свыше fc/16 |
(Измененная редакция, Изм. А2).
Разделение знака осуществляется за счет дополнительного разграничительного интервала (EGT).
EGT между двумя последовательными знаками, посылаемыми от PCD к PICC, должен быть от 0 до 5,875 etu (etu не обязательно целое число), как определено в таблице 14.
EGT между двумя последовательными знаками, посылаемыми от PICC к PCD, должен быть от 0 до 2 etu (etu не обязательно целое число), как определено в таблице 15.
Таблица 14 - EGT от PCD к PICC
EGT от PCD к PICC | |||
PCD должно использовать EGT между значениями | PICC должна принимать EGT между значениями | ||
минимум | максимум | минимум | максимум |
0 etu | 5,875 etu | 0 etu | 6 etu |
Таблица 15 - EGT от PICC к PCD
EGT от PICC к PCD | |||
PICC должна использовать EGT между значениями | PCD должно принимать EGT между значениями | ||
минимум | максимум | минимум | максимум |
0 etu | 2 etu | 0 etu | 2,125 etu |
Примечание - Целое число etu для EGT должно использоваться для всех скоростей передачи данных. Не целые числа могут быть не допущены в будущих пересмотрах настоящего стандарта. |
7.1.2.2 Разделение знака при скоростях передачи fc/8, fc/4 и fс/2
Разделение знака при данных скоростях не должно применяться.
7.1.3 Формат кадра
PCD и PICC должны посылать знаки как кадры. Кадр ограничен SOF и EOF, как определено на рисунке 14, если не произошло их подавление в соответствии с 7.10.3.3.
Рисунок 14 - Формат кадра
![]()
Рисунок 14 - Формат кадра
Формат кадра для скоростей передачи 3 |
(Измененная редакция, Изм. N 1).
7.1.4 SOF
SOF, как показано на рисунке 15, состоит из:
- одного заднего фронта, за которым следует
- etu от 10 до 11 при логическом 0 (низкий уровень SOF), за которым следует
- один одиночный нарастающий фронт, за которым следует
- etu от 2 до 3 при логической 1 (высокий уровень SOF).
Рисунок 15 - SOF

Рисунок 15 - SOF
Передача SOF определена в таблицах 16, 17 и 18.
Таблица 16 - SOF передачи PCD
Уровень SOF передачи PCD | PCD должно использовать интервал времени между | PICC должна принимать интервал времени между | ||
минимум | максимум | минимум | максимум | |
Низкий | 10 etu | 11 etu + 1/16 etu | 10 etu - 1/16 etu | 11 etu + 1/8 etu |
Высокий | 2 etu - 1/16 etu | 3 etu + 1/16 etu | 2 etu - 1/8 etu | 3 etu + 1/8 etu |
Таблица 17 - Низкий уровень SOF передачи PICC
Скорость передачи | PICC должна использовать интервал времени низкого уровня SOF между | PCD должно принимать интервал времени низкого уровня SOF между | ||||
минимум | максимум | минимум | максимум | |||
fc/128 | 10 etu - 0,5/ fs | 11 etu + 0,5/fs | 10 etu - 1/fs | 11 etu + 1/fs | ||
fc/64 | 10 etu | 11 etu | 10 etu - 0,5/fs | 11 etu + 0,5/fs | ||
fc/32 | 10 etu | 11 etu | 10 etu | 11 etu | ||
>fc/32 | 10 etu | 11 etu | 10 etu | 11 etu |
Таблица 18 - Высокий уровень SOF передачи PICC
Скорость передачи | PICC должна использовать интервал времени высокого уровня SOF между | PCD должно принимать интервал времени высокого уровня SOF между | ||||
минимум | максимум | минимум | максимум | |||
fc/128 | 2 etu - 0,5/fs | 3 etu + 0,5/fs | 2 etu - 1/fs | 3 etu + 1/fs | ||
fc/64 | 2 etu | 3 etu | 2 etu - 0,5/fs | 3 etu + 0,5/fs | ||
fc/32 | 2 etu | 3 etu | 2 etu | 3 etu | ||
>fc/32 | 2 etu | 3 etu | 2 etu | 3 etu |
Примечание - Все значения в таблицах 17 и 18 соответствуют требованиям к сдвигу фаз по ИСО/МЭК 14443-2, 9.2.4.
SOF для скоростей передачи 3 |
(Измененная редакция, Изм. N 1).
7.1.5 EOF
EOF, как показано на рисунке 16, состоит из:
- одного заднего фронта, за которым следует
- etu от 10 до 11 при логическом 0 (низкий уровень EOF), за которым следует
- один единственный нарастающий фронт.
Рисунок 16 - EOF

Рисунок 16 - EOF
Передача EOF определена в таблицах 19 и 20.
Таблица 19 - EOF передачи PCD
PICC должна использовать интервал времени EOF между | PCD должно принимать интервал времени EOF между | ||
минимум | максимум | минимум | максимум |
10 etu | 11 etu + 1/16 etu | 10 etu - 1/16 etu | 11 etu + 1/8 etu |
Таблица 20 - EOF передачи PICC
Скорость передачи | PICC должна использовать интервал времени EOF между | PCD должно принимать интервал времени EOF между | ||||
минимум | максимум | минимум | максимум | |||
fc/128 | 10 etu - 0,5/fs | 11 etu + 0,5/fs | 10 etu - 1/fs | 11 etu + 1/fs | ||
fc/64 | 10 etu | 11 etu | 10 etu - 0,5/fs | 11 etu + 0,5/fs | ||
fc/32 | 10 etu | 11 etu | 10 etu | 11 etu | ||
>fc/32 | 10 etu | 11 etu | 10 etu | 11 etu |
Примечание - Все значения в таблице 20 соответствуют требованиям к сдвигу фаз по ИСО/МЭК 14443-2, 9.2.4.
EOF для скоростей передачи 3 |
(Измененная редакция, Изм. N 1).
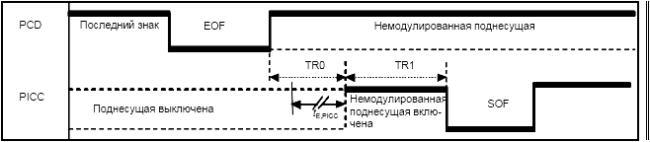
7.1.6 Синхронизация до SOF PICC
Старт передачи PICC после передачи данных PCD должен соответствовать синхронизации, показанной на рисунке 17.
Минимальные значения по умолчанию TR0 и TR1 определены в ИСО/МЭК 14443-2 и могут быть уменьшены PCD (см. 7.10.3).
Максимальное значение TR0: |
(Измененная редакция, Изм. А2).
Максимальное значение для TR1 - 200/fs.
Рисунок 17 - Синхронизация до SOF PICC
Примечание - ![]() определено в разделе 8.
определено в разделе 8.
Рисунок 17 - Синхронизация до SOF PICC
(Измененная редакция, Изм. А1).
PICC может включить поднесущую, только если она намерена начать передачу информации.
Минимальное и максимальное значения TR0 и TR1 применимы к PICC. PCD должны принимать минимальное и максимальное значения TR0 с допустимым пределом 16/fc, a TR1 - с допустимым пределом 1/fs. |
(Измененная редакция, Изм. А2).
7.1.7 Синхронизация до SOF PCD
Старт передачи PCD после передачи данных PICC и EOF должны соответствовать синхронизации, показанной на рисунке 18. PICC должна выключить свою поднесущую после передачи EOF и соответствовать синхронизации, приведенной в таблице 21.
Сигнал поднесущей:
- не должен быть остановлен до завершения EOF;
- должен быть остановлен не позднее 2 etu после завершения EOF.
Примечание - Если поднесущая выключена в то же время, что и нарастающий фронт EOF PICC, то остановка поднесущей представляет собой нарастающий фронт EOF PICC.
Минимальное значение TR2 кодируется в ATQB с помощью Protocol_Type в поле "Protocol Info" (см. 7.9.4.4).
Рисунок 18 - Синхронизация до SOF PCD
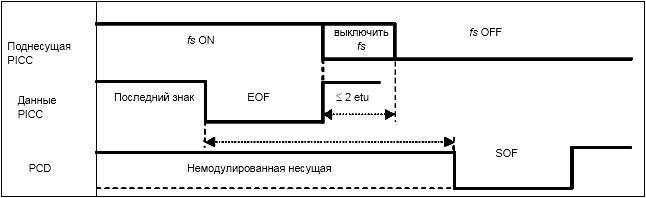
Рисунок 18 - Синхронизация до SOF PCD
Таблица 21 - Синхронизация (в момент "выключить fs") до SOF PCD
PICC должна использовать интервал времени между | PCD должно принимать интервал времени между | ||
минимум | максимум | минимум | максимум |
0 etu | 2 etu | 0 etu | 2 etu + 1/fs |
Минимальное значение TR2 применимо к PICC. Минимальное значение TR2 в PCD должно быть с допустимым пределом 100/fc.
EOF для скоростей передачи 3 |
(Измененная редакция, Изм. N 1).
7.2 CRC_B
Кадр должен считаться корректным, только если он получен с допустимым значением CRC_B.
CRC_B кадра является функцией ![]() бит данных, которые состоят из всех бит данных в кадре, за исключением стартового бита, стоп-бита, задержки между байтами, SOF и EOF и самого CRC_B. Поскольку данные кодируются в байтах, то количество бит
бит данных, которые состоят из всех бит данных в кадре, за исключением стартового бита, стоп-бита, задержки между байтами, SOF и EOF и самого CRC_B. Поскольку данные кодируются в байтах, то количество бит ![]() кратно 8.
кратно 8.
Для выявления ошибок два байта CRC_B включены в кадр (после бит данных и до EOF). CRC_B - в соответствии с ИСО/МЭК 13239. Начальное содержание регистра должно быть: 'FFFF'.
Примеры см. в приложении В.
7.3 Последовательность антиколлизии
Последовательность антиколлизии управляется PCD с помощью набора команд, описанных в настоящем подразделе.
PCD является главным узлом передачи данных с одной или более PICC. Оно также инициирует работу передачи данных PICC путем выдачи команды REQB/WUPB для вызова ответа PICC.
Во время последовательности антиколлизии может случиться, что две или более PICC отвечают одновременно: это называется коллизией. Набор команд позволяет PCD использовать последовательности, чтобы отделить передачи PICC во времени. PCD может повторять свою процедуру антиколлизии до тех пор, пока не найдет все PICC в рабочей области.
После завершения последовательности антиколлизии передача PICC будет под контролем PCD, позволяя только одной PICC отвечать единовременно.
Схема антиколлизии основана на определении слотов, в которых PICC предлагается ответить с минимальным набором идентификационных данных. Количество слотов параметризовано в REQB/WUPB и может варьироваться от одного до некоторого целого числа. Вероятность ответа PICC на каждый слот является управляемой. PICC разрешено ответить только один раз в последовательности антиколлизии.
Следовательно, даже если в поле PCD присутствует несколько PICC, то вероятно будет слот, в котором только одна PICC отвечает и PCD способен зафиксировать идентификационные данные. На основе идентификационных данных PCD способно установить канал передачи с идентифицируемой PICC.
Последовательность антиколлизии позволяет выбрать одну или несколько PICC для дальнейшей передачи в любое время.
7.4 Описание состояний PICC
Различные состояния и условия перехода между состояниями описывают подробное поведение PICC во время последовательности антиколлизии.
В рисунках 19 и 20 применены следующие обозначения:
REQB (AFI /nAFI, N, R)/WUPB (AFI /nAFI, N, R) - команды REQB/ WUPB с согласованным/несогласованным AFI;
AFI - согласованный AFI;
nAFI - несогласованный AFI;
Slot-MARKER - команда Slot MARKER с согласованным номером слота;
nSlot-MARKER - команда Slot-MARKER с несогласованным номером слота;
HLTB(PUPI) - команда HLTB с согласованным PUPI;
HLTB (nPUPI) - команда HLTB с несогласованным PUPI;
ATTRIB (PUPI) - команда ATTRIB с согласованным PUPI;
ATTRIB (nPUPI) - команда ATTRIB с несогласованным PUPI;
Error - обнаруженная ошибка передачи или непредвиденный кадр.
Рисунок 19 - Диаграмма состояний PICC типа В
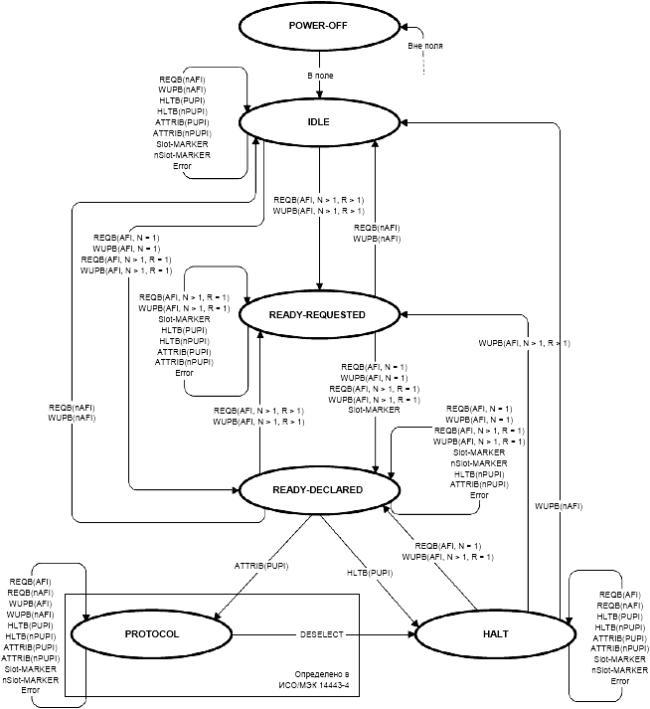
Рисунок 19 - Диаграмма состояний PICC типа В
7.4.1 Блок-схема инициализации и антиколлизии
Рисунок 20 - Блок-схема инициализации и антиколлизии PICC
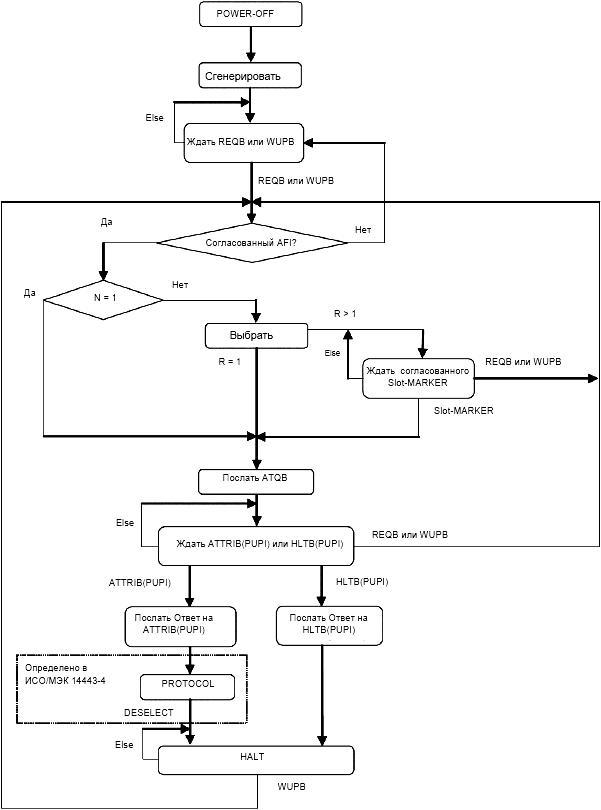
Рисунок 20 - Блок-схема инициализации и антиколлизии PICC
Примечание - R является случайным числом, выбираемым PICC в диапазоне от 1 до N (кодирование N см. в 7.7.4).
7.4.2 Общие положения для описания состояния и переходов
К любому состоянию применимо следующее условие:
PICC должна вернуться в состояние POWER-OFF, если радиочастотное поле исчезает.
К любому состоянию, характерному для последовательности антиколлизии (за исключением состояния PROTOCOL), применимы следующие условия:
- должны быть использованы параметры передачи по умолчанию, как определено в ИСО/МЭК 14443-2 и в предыдущих подразделах;
- PICC не должна порождать поднесущую, за исключением случаев передачи кадров ответа, как указано в предыдущем подразделе;
- если кадр из PCD допустимый (правильный CRC_B), то PICC должна выполнить требуемые действия и/или дать ответ в зависимости от ее состояния;
- так как в командах антиколлизии первые 3 бита данных в кадре - (101)b (3 первые бита префиксного байта антиколлизии), то PICC не должна давать ответ на кадр команды, который начинается не с (101)b;
- PICC должна реагировать только на полученные допустимые кадры (ответ не отправляется, если обнаружены ошибки передачи).
7.4.3 Состояние POWER-OFF
Описание:
В состоянии POWER-OFF на PICC не поступает питание от рабочего поля PCD.
Условия выхода из состояния и переходы:
Если PICC находится в возбужденном магнитном поле напряженностью более ![]() (см. ИСО/МЭК 14443-2), то она входит в состояние IDLE в течение задержки (не более), определенной в разделе 5 настоящего стандарта.
(см. ИСО/МЭК 14443-2), то она входит в состояние IDLE в течение задержки (не более), определенной в разделе 5 настоящего стандарта.
7.4.4 Состояние IDLE
Описание:
В состоянии IDLE на PICC подается питание. Она ожидает кадры и должна распознавать команды REQB и WUPB.
Условия выхода из состояния и переходы:
PICC при приеме кадра допустимой команды REQB или WUPB должна войти в подсостояние READY-REQUESTED или READY-DECLARED, в зависимости от значений N и при необходимости R, как определено в 7.6. (Допустимый REQB/WUPB означает допустимый кадр с командой REQB/WUPB и согласованным AFI. Более подробная информация представлена в спецификации команды REQB/WUPB.)
7.4.5 Подсостояние READY-REQUESTED
Описание:
В подсостоянии READY-REQUESTED на PICC подается питание. Она ранее должна была получить допустимую команду REQB или WUPB с контрольным параметром N (не равным 1). PICC имеет случайное число R (не равное 1), которое используется для управления последующей операцией, как описано в 7.6. Она ожидает кадры и должна распознать команды REQB, WUPB и Slot-MARKER.
Условия выхода из состояния и переходы:
См. 7.6.
Особое замечание:
В этом состоянии ATQB еще не отправлен.
7.4.6 Подсостояние READY-DECLARED
Описание:
В подсостоянии READY-DECLARED на PICC подается питание. Она ранее должна была отправить свой ATQB, соответствующий последней полученной допустимой команде REQB/WUPB/Slot-MARKER. Она ожидает кадры и должна распознать команды REQB/WUPB, ATTRIB и HLTB.
Условия выхода из состояния и переходы:
PICC при получении допустимой команды ATTRIB входит в состояние PROTOCOL, если PUPI в команде ATTRIB согласуется с PUPI PICC.
Если PUPI в команде ATTRIB не согласуется с PUPI PICC, то PICC остается в подсостоянии READY-DECLARED.
При приеме кадра допустимой команды REQB/ WUPB должны применяться те же условия и переходы, что при получении кадра допустимой команды REQB/WUPB в состоянии IDLE.
PICC при приеме согласованной команды HLTB должна войти в состояние HALT.
7.4.7 Состояние PROTOCOL
Описание:
В состоянии PROTOCOL на PICC подается питание. Она ранее должна была отправить свой ответ на команду ATTRIB.
Если PICC была выбрана для работы с протоколом по ИСО/МЭК 14443-4 с командой ATTRIB, то она должна работать в соответствии с ИСО/МЭК 14443-4, в противном случае она может продолжить работу с протоколом, не соответствующим ИСО/МЭК 14443-4.
Особые замечания:
На допустимые кадры команд REQB/ WUPB или Slot-MARKER не должно быть ответа.
На допустимый кадр с командой ATTRIB не должно быть ответа.
В протоколе верхнего уровня могут быть определены специфичные команды, чтобы вернуть PICC в другие состояния (IDLE или HALT). PICC может вернуться в эти состояния только после приема данных команд.
7.4.8 Состояние HALT
Описание:
В состоянии HALT на PICC подается питание. Она ожидает кадры и должна распознавать команды WUPB. PUPI не должен изменяться (см. 7.9.2) при входе или выходе из состояния HALT.
Условия выхода из состояния и переходы:
PICC при получении допустимой команды WUPB должна войти в подсостояние READY-REQUESTED или READY-DECLARED, в зависимости от значений N и при необходимости R, как определено в 7.6. (Допустимый REQB/WUPB означает допустимый кадр с командой REQB/WUPB и согласованным AFI. Более подробная информация представлена в спецификации команды REQB/WUPB.) Если AFI не согласован, то PICC переходит в состояние IDLE.
7.5 Набор команд
Для управления многоузловыми каналами передачи используются четыре базовые команды:
- REQB/WUPB;
- Slot-MARKER;
- ATTRIB;
- HLTB.
Все данные команды используют знак, формат кадра и синхронизацию, описанные в 7.1.
Команды и ответы PICC на эти команды описаны в следующих подразделах. Любой кадр, полученный с неправильным форматом (неправильные идентификаторы кадра или недопустимый CRC_B), должен игнорироваться.
7.6 Правила ответа антиколлизии
PICC, которая находится в состоянии IDLE или в подсостоянии READY-REQUESTED, или в подсостоянии READY-DECLARED и получает допустимую команду REQB/WUPB (AFI = 0 или AFI согласован с внутренним приложением) или которая находится в состоянии HALT и принимает допустимую команду WUPB (AFI = 0 или AFI согласован с внутренним приложением), должна дать ответ в соответствии со следующими правилами, согласно которым параметр N дан в команде REQB/WUPB:
если N=1, то PICC посылает ATQB и должна перейти в подсостояние READY-DECLARED;
если N>1, то PICC должна сгенерировать случайные числа R, которые должны быть равномерно распределены между 1 и N:
- если R=1, то PICC должна послать ATQB и перейти в подсостояние READY-DECLARED;
- если R>1, то PICC должна ждать, пока она не получит команду Slot-MARKER с согласованным номером слота (номер слота = R) перед отправкой ATQB и переходом в подсостояние READY-DECLARED.
На рисунке 19 показаны различные переходы между состояниями.
7.6.1 PICC только с инициализацией
Если решение антиколлизии не требуется (например, в поле PCD ожидается только одна PICC), то для PICC необязательно поддерживать команду REQB/WUPB с N>1 или команду Slot-MARKER. Для PCD необязательно поддерживать такие PICC, особенно в тех случаях, когда PCD не используют REQB/WUPB с N=1 или при наличии нескольких PICC. Такие PICC типа В описаны в последующих подразделах настоящего стандарта.
7.7 Команда REQB/WUPB
Команды REQB и WUPB, отправленные PCD, используются для исследования поля PICC типа В. Кроме того, команда WUPB используется для запуска PICC, которые находятся в состоянии HALT.
Количество слотов N включено в команду в качестве параметра оптимизации алгоритма антиколлизии для данного приложения. Ответы PICC на данные команды показаны на рисунках 19 и 20.
7.7.1 Формат команды REQB/WUPB
Формат команда REQB/WUPB приведен на рисунке 21.

Рисунок 21 - Формат команды REQB/WUPB
7.7.2 Кодирование префиксного байта антиколлизии APf
Префиксный байт антиколлизии APf ='05' = (0000 0101)b.
7.7.3 Кодирование AFI
AFI (идентификатор семейства приложений) представляет собой задаваемый PCD тип приложения и используется для предварительного выбора PICC перед ATQB. Дать ответ на команду REQB/WUPB с AFI, отличным от '00', могут только PICC с приложениями того типа, который указал AFI. Если AFI равен '00', то все PICC обрабатывают команду REQB/WUPB.
Старший значащий полубайт из AFI используется для кодирования одного конкретного или всего семейства приложений, как определено в таблице 22. Младший значащий полубайт AFI используется для кодирования одного конкретного или всего подсемейства приложений. Коды подсемейства, отличные от 0, являются проприетарными, если в таблице 22 не определено иное.
Таблица 22 - Кодирование AFI
AFI | Ответ PICC | Примеры/примечания | |
старший значащий полубайт | младший значащий полубайт | ||
'0' | '0' | Все семейства и подсемейства | Отсутствие предварительного выбора применения |
X | '0' | Все подсемейства семейства X | Предварительный выбор широкого применения |
X | Y | Только Y | |
'0' | Y | Только проприетарное подсемейство Y | |
'1' | '0', Y | Транспорт | Общественный транспорт, авиалинии и т.д. |
'2' | '0', Y | Финансы | IEP, банковое дело, розничная торговля и т.д. |
'3' | '0', Y | Идентификация | Доступ, контроль |
'4' | '0', Y | Телекоммуникация | Телефонная связь общего пользования, GSM и т.д. |
'5' | '0', Y | Медицина | |
'6' | '0', Y | Мультимедиа | Интернет-услуги и т.д. |
'7' | '0', Y | Игорный бизнес | |
'8' | '0', Y | Хранение данных | Переносимые файлы и т.д. |
'9'-'D' | '0', Y | RFU | |
'Е' | '0', Y= 1, Y = 2, Остальные значения Y - RFU | Машиносчитываемые паспортно-визовые документы (MRTD | Y = 1 еПаспорт |
'F' | '0', Y | RFU |
_______________![]() Machine Readable Travel Documents
Machine Readable Travel Documents
Примечание - Х= от '1' до 'F' , Y = от '1' до 'F'.
PCD, посылающее команду REQB/WUPB с полем AFI, установленным на RFU-значение, не соответствует требованиям настоящего стандарта. PICC не должна выдавать ответ, если поле AFI установлено на RFU-значение.
7.7.4 Кодирование PARAM
Кодирование PARAM показано на рисунке 22.
Рисунок 22 - Кодирование PARAM

Рисунок 22 - Кодирование PARAM
Все RFU-биты должны быть установлены на (0)b.
b4 = (0)b определяет команду REQB: PICC в состоянии IDLE или READY должны обрабатывать эту команду.
b4 = (1)b определяет команду WUPB: PICC в состоянии IDLE или READY, или HALT должны обрабатывать эту команду.
b1, b2, bЗ используются для кодирования N в соответствии с таблицей 23.
b5 указывает на возможность PCD поддерживать расширенный ответ ATQB от PICC. Использование расширенного ATQB не является обязательным для PICC. Кодирование b5 выглядит следующим образом:
- b5 = (0)b определяет: расширенный ATQB, определенный в 7.9.4.7, не поддерживается PCD;
- b5 = (1)b определяет: расширенный ATQB, определенный в 7.9.4.7, поддерживается PCD.
ПРЕДУПРЕЖДЕНИЕ - Производители PCD должны позаботиться о том, чтобы b5 был RFU по ИСО/МЭК 14443-3:2001 и поведение PICC c b5 = (1)b не было определено.
PCD, посылающее команду REQB/WUPB с битами (от b8 до b6) <> (000)b, не соответствует требованиям настоящего стандарта.
PICC должна игнорировать биты (от b8 до b6), и ее интерпретация любых других полей во всем кадре не должна измениться.
Таблица 23 - Кодирование N
b3 | b2 | b1 | N |
0 | 0 | 0 | 1=2 |
0 | 0 | 1 | 2 = 2 |
0 | 1 | 0 | 4 = 2 |
0 | 1 | 1 | 8 = 2 |
1 | 0 | 0 | 16 = 2 |
1 | 0 | 1 | RFU |
1 | 1 | x | RFU |
До тех пор, пока RFU-значения (101)b или (11х)b не назначены ИСО/МЭК, PICC, принимающая биты (от b3 до b1) = (101)b или (11х)b, должна интерпретировать их как биты (от b3 до b1) = (100)b (16 слотов).
PCD, посылающее биты (от bЗ до b1) = (101)b или (11х)b, не соответствует требованиям настоящего стандарта.
Примечание - Для каждой PICC вероятность ответа (ATQB) в первом слоте составляет 1/N.
7.8 Команда Slot-MARKER
PCD после команды REQB/WUPB может отправить до (N - 1) команд Slot-MARKER для определения начала каждого слота.
Команды Slot-MARKER могут быть отправлены:
- после окончания сообщения ATQB, полученного PCD;
- или раньше, если ATQB не получен.
7.8.1 Формат команды Slot-MARKER
Формат команды Slot-MARKER показан на рисунке 23.
Рисунок 23 - Формат команды Slot-MARKER
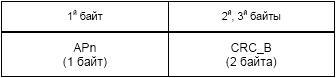
Рисунок 23 - Формат команды Slot-MARKER
7.8.2 Кодирование префиксного байта антиколлизии АРn
APn = (nnnn 0101)b, где nnnn определяет номер слота в соответствии с таблицей 24.
Таблица 24 - Кодирование номера слота
nnnn | Номер слота |
0001 | 2 |
0010 | 3 |
0011 | 4 |
… | … |
1110 | 15 |
1111 | 16 |
Примечание - Команды Slot-MARKER не обязательно должны посылаться последовательно с возрастающими номерами слотов.
7.9 Ответ ATQB
Ответ на обе команды REQB/WUPB и Slot-MARKER называется ATQB.
7.9.1 Формат ответа ATQB
Два формата Ответа ATQB приведены на рисунке 24.
Рисунок 24 - Форматы ответа ATQB
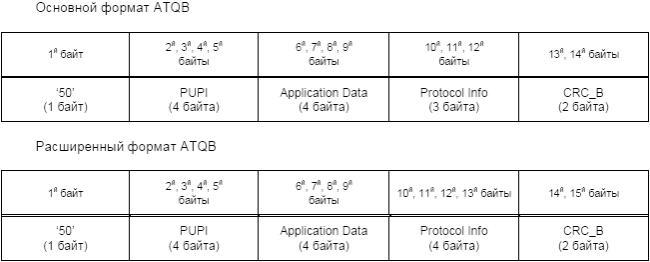
Рисунок 24 - Форматы ответа ATQB
PICC должна отправить основной формат ATQB, если расширенный ATQB не поддерживается PCD (см. 7.7.4).
PICC может отправить расширенный формат ATQB, если расширенный ATQB поддерживается PCD (см. 7.7.4).
7.9.2 PUPI (псевдоуникальный идентификатор PICC)
PUPI используется для различения PICC во время антиколлизии. PUPI обозначается 4-байтовым числом, которое может быть либо числом, динамически генерируемым PICC, либо диверсифицированным фиксированным числом. PUPI должны быть получены только путем перехода из состояния POWER-OFF в состояние IDLE.
ПРЕДУПРЕЖДЕНИЕ - PICC, соответствующие ИСО/МЭК 14443-3:2001, могут изменить свой PUPI при выходе из состояния HALT и/или в состоянии IDLE.
7.9.3 Данные приложения
Поле Application data (данные приложения) используется для информирования PCD, какие приложения в настоящее время установлены в PICC. Эта информация позволяет PCD выбрать требуемую PICC в присутствии более чем одной PICC.
Данные приложения определяются в зависимости от поля ADC (Application Data Coding) в поле Protocol info (см. 7.9.4), которое определяет, какое кодирование используется: метод сжатия CRC_B, описанный ниже, или проприетарное кодирование.
Содержание поля Application data при использовании кодирования по методу сжатия CRC_B показано на рисунке 25
Рисунок 25 - Формат данных приложения

Рисунок 25 - Формат данных приложения
Примечание - Два байта CRC_B (AID) отправляются в том же порядке, что и другие CRC_B.
7.9.3.1 AFI
Для PICC с одним приложением AFI задает семейство приложений (см. кодирование AFI в таблице 22).
Для PICC с несколькими приложениями AFI задает семейство приложений, описанных в CRC_B (AID) .
7.9.3.2 CRC_B (AID)
CRC_B(AID) является результатом вычисления CRC_B для AID приложения PICC (как определено в ИСО/МЭК 7816-4:2005, 8.2.1.2), согласующей AFI, приведенные в команде REQB/WUPB.
7.9.3.3 Количество приложений
Поле Number of Application (количество приложений) указывает, сколько приложений находятся в PICC.
Значение старшего значащего полубайта определяет число приложений, соответствующих AFI, приведенных в Application Data, где '0' означает отсутствие приложения, a 'F' - 15 или более приложений.
Значение младшего значащего полубайта определяет общее число приложений в PICC, где '0' означает отсутствие приложений, a 'F' - 15 или более приложений.
7.9.4 Информация о протоколе
Поле Protocol Info (информация о протоколе) указывает параметры, поддерживаемые PICC. На рисунке 26 показан формат данного поля.
Рисунок 26 - Формат Protocol Info

Рисунок 26 - Формат Protocol Info
RFU-биты на рисунке 26 должны быть установлены на (0)b.
7.9.4.10* FO
__________________
* Нумерация соответствует оригиналу. - .
Frame Option (опция кадра), поддерживаемая PICC, определена в таблице 25.
Таблица 25 - Frame Option, поддерживаемая PICC
b2 | b1 | Значение |
1 | x | NAD, поддерживаемый PICC |
x | 1 | CID, поддерживаемый PICC |
7.9.4.2 ADC
ADC состоит из двух бит: b3 и b4.
b3 = (0)b означает, что кодирование данных приложения является проприетарным.
b3 = (1)b означает, что кодирование данных приложения, как описано в 7.9.3.
b4 - RFU и должен быть установлен на (0)b.
7.9.4.3 FWI
FWI - это время ожидания кадра, целое число, (4 бита) кодируется от b8 до b5.
FWI кодирует значение целого числа, используемого для определения FWT.
FWT определяет максимальное время для PICC, чтобы начать свой ответ после окончания кадра PCD.
FWT рассчитывается по формуле:
FWT = (256·16/fc)2![]() ,
,
где значение FWI имеет диапазон от 0 до 14, а значение 15 является RFU.
Для FWI = 0, FWT минимально (~302 мкс).
Для FWI = 14, FWT максимально (~4949 мс).
В случае расширенного ATQB, поддерживаемого PICC и PCD:
- FWT применяется после ответа на команду ATTRIB;
- время ожидания для ответа на команду ATTRIB является фиксированным значением, определяемым по следующей формуле:
время ожидания ответа на команду ATTRIB = (256·16/fc)·2![]() (~4,8 мс).
(~4,8 мс).
Примечание 1 - Настоятельно рекомендуется использовать как можно меньшее значение FWT для защиты скорости передачи при повторах.
PICC, устанавливающая FWI = 15, не соответствует требованиям настоящего стандарта.
Пока RFU-значение 15 не назначено ИСО/МЭК, PCD, принимающее FWI = 15, должно интерпретировать его как FWI = 4.
Примечание 2 - Это дополнительное требование для совместимости PCD с будущими PICC, когда ИСО/МЭК определит поведение для RFU-значения 15.
7.9.4.4 Protocol_Type
В таблице 26 определен Protocol_Type, поддерживаемый PICC.
Таблица 26 - Protocol_Type, поддерживаемый PICC
b1 | Значение |
1 | PICC соответствует ИСО/МЭК 14443-4 |
0 | PICC не соответствует ИСО/МЭК 14443-4 |
Минимальное значение TR2 (задержка между началом EOF PICC и началом SOF PCD) определяется битами Protocol_Type (b3, b2), как указано в таблице 27.
Таблица 27 - Кодирование минимума TR2
b3 | b2 | Минимум TR2 |
0 | 0 | 10 etu + 512/fc |
0 | 1 | 10 etu + 2048/fc |
1 | 0 | 10 etu + 4096/fc |
1 | 1 | 10 etu + 8192/fc |
(Измененная редакция, Изм. А2).
b4 - RFU и должен быть установлен на (0)b.
PCD не должно продолжать передачу с PICC, устанавливающей b4 на (1)b.
7.9.4.5 Max_Frame_Size
В таблице 28 определен максимальный размер кадра.
| ||||||||||||||||
Код максимального размера кадра в ATQB | '0' | '1' | '2' | '3' | '4' | '5' | '6' | '7' | '8' | '9' | 'А' | 'В' | 'С' | 'D' - 'F' | ||
Максимальный размер кадра (байт) | 16 | 24 | 32 | 40 | 48 | 64 | 96 | 128 | 256 | 512 | 1024 | 2048 | 4096 | RFU |
PICC, устанавливающая код максимального размера кадров 'D' - 'F', не соответствует требованиям настоящего стандарта. |
(Измененная редакция, Изм. А2).
7.9.4.6 Bit_Rate_capability
В таблице 29 определены скорости передачи, поддерживаемые PICC.
PICC, устанавливающая b4 = (1)b, не соответствует требованиям настоящего стандарта.
Таблица 29 - Скорости передачи данных, поддерживаемые PICC
b8 | b7 | b6 | b5 | b4 | b3 | b2 | b1 | Значение |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | PICC поддерживает только fc/128 (~106 кбит/с) в обоих направлениях |
1 | x | x | x | 0 | x | x | x | Обязательно одинаковая скорость от PCD к PICC и от PICC к PCD |
x | x | x | 1 | 0 | x | x | x | От PICC к PCD - 1 etu = 64/fc, поддерживаемая скорость передачи fc/64 (~212 кбит/с) |
x | x | 1 | x | 0 | x | x | x | От PICC к PCD - 1 etu = 32/fc, поддерживаемая скорость передачи fc/32 (~424 кбит/с) |
x | 1 | x | x | 0 | x | x | x | От PICC к PCD - 1 etu = 16/fc, поддерживаемая скорость передачи fc/16 (~848 кбит/с) |
x | x | x | x | 0 | x | x | 1 | От PICC к PCD - 1 etu = 64/fc, поддерживаемая скорость передачи fc/64 (~212 кбит/с) |
x | x | x | x | 0 | x | 1 | x | От PICC к PCD - 1 etu = 32/fc, поддерживаемая скорость передачи fc/32 (~424 кбит/с) |
x | x | x | x | 0 | 1 | x | x | От PICC к PCD - 1 etu = 16/fc, поддерживаемая скорость передачи fc/16 (~848 кбит/с) |
Значения с b4 = (1)b являются RFU. |
До тех пор, пока RFU-значения с b4 = (1)b не назначены ИСО/МЭК, PCD, принимающее Bit_Rate_capability с b4 = (1)b, должно интерпретировать байт Bit_Rate_capability как (биты от b8 до b1) = (00000000)b (только fc/128 в обоих направлениях).
Примечание - S(PARAMETERS) в соответствии с ИСО/МЭК 14443-4:2008/Amd.2 - это единственный способ согласовать скорости передачи свыше fc/16. S(PARAMETERS) может использоваться для согласования специфичной скорости передачи данных. |
(Измененная редакция, Изм. А2).
7.9.4.7 Расширенный ATQB (дополнительно)
Дополнительный байт расширенного ATQB (дополнительный 4-й байт в поле Protocol Info) состоит из двух частей:
- младший значащий полубайт (от b4 до b1) является RFU и должен быть установлен на (0000)b;
- старший значащий полубайт (от b8 на b5) определяет запуск разграничительного интервала кадра, целое число (SFGI).
SFGI кодирует значение целого числа, используемого для определения запуска разграничительного интервала кадра (SFGT).
SFGT определяет специфичный разграничительный интервал, заменяющий TR2, который необходим PICC, прежде чем она будет готова получить следующий кадр после отправки команды Ответ на ATTRIB. SFGI кодируется в диапазоне от 0 до 14. Значение 15 является RFU. Значения в диапазоне от 0 до 14 используются для расчета SFGT по формуле, приведенной ниже. Значение по умолчанию для SFGI равно 0.
SFGT = (256·16/fc)2![]() .
.
Для SFGI = 0, SFGT минимально (~302 мкс).
Для SFGI = 14, SFGT максимально (~4949 мс).
PICC, устанавливающая SFGI = 15, не соответствует требованиям настоящего стандарта.
До тех пор, пока RFU-значение 15 не назначено ИСО/МЭК, PCD, принимающее SFGI = 15, должно интерпретировать его как SFGI = 0.
PICC, посылающая ответ ATQB (биты от b4 до b1) <> (0000)b, не соответствует требованиям настоящего стандарта.
PCD должно игнорировать (биты от b4 до b1), а интерпретация любых других полей всего кадра не должна измениться. PCD, изменяющее интерпретацию любых других полей всего кадра при (биты от b4 до b1) <> (0000)b, не соответствует требованиям настоящего стандарта.
Отвечая на команду REQB/WUPB с битом b5, установленным на (0)b (расширенный ATQB не поддерживается), PICC не должна посылать дополнительный 4-й байт в своем ответе ATQB.
7.10 Команда ATTRIB
Команда ATTRIB, посылаемая PCD, должна включать информацию, необходимую для выбора одной PICC.
PICC, принимающая команду ATTRIB с ее идентификатором, становится выбранной и назначенной для выделенного канала. После того как PICC выбрана, она отвечает на команды, определенные в протоколе верхнего уровня, который включает в себя уникальный CID.
Параметры, выбранные в команде ATTRIB, должны применяться после Ответа на ATTRIB.
7.10.1 Формат команды ATTRIB
Формат команды ATTRIB приведен на рисунке 27.
Рисунок 27 - Формат команды ATTRIB

Рисунок 27 - Формат команды ATTRIB
7.10.2 Идентификатор
Данный идентификатор является значением PUPI, посылаемым PICC в ATQB.
7.10.3 Кодирование Param 1
На рисунке 28 приведено кодирование Param 1.
Рисунок 28 - Кодирование Param 1

Рисунок 28 - Кодирование Param 1
Все RFU-биты должны быть установлены на (0)b, если не указано иное. PCD, устанавливающее (b2, b1) <> (00)b, не соответствует требованиям настоящего стандарта. PICC должна игнорировать любые значения (b2, b1), а интерпретация любых других полей всего кадра не должна измениться.
7.10.3.1 Минимальный TR0
Кодирование минимального TR0 определено в таблице 30. В ней указана минимальная задержка перед ответным действием PICC после окончания команды, посылаемой PCD. Значение по умолчанию определено в ИСО/МЭК 14443-2, 9.2.5.
Таблица 30 - Кодирование минимального TR0 | |||||
b8 | b7 | Минимальный TR0 для передачи от PCD к PICC при скорости передачи данных | |||
fc/128 | >fc/128 | ||||
0 | 0 | 1024/fc | 1024/fc | ||
0 | 1 | 768/fc | 512/fc | ||
1 | 0 | 256/fc | 256/fc | ||
1 | 1 | RFU | RFU | ||
|
(Измененная редакция, Изм. A2).
Примечание - Минимальный TR0 требуется для PCD при переходе от передачи к приему, и его значение зависит от быстродействия PCD.
PCD, устанавливающее (b8, b7) = (11)b, не соответствует требованиям настоящего стандарта. До тех пор, пока RFU-значение (11)b не назначено ИСО/МЭК, PICC, принимающая (b8, b7) = (11)b, должна интерпретировать его как (b8, b7) = (00)b, т.е. значение по умолчанию.
7.10.3.2 Минимальное TR1
Кодирование минимального TR1 определено в таблице 31. В ней указана минимальная задержка для PICC между началом модуляции поднесущей и началом передачи данных. Значение по умолчанию определено в ИСО/МЭК 14443-2, 9.2.5.
Таблица 31 - Кодирование минимального TR1
b6 | b5 | Минимальное TR1 для передачи от PICC к PCD на скорости передачи данных | |||
fc/128 | >fc/128 | ||||
0 | 0 | 80/fs | 80/fs | ||
0 | 1 | 64/fs | 32/fs | ||
1 | 0 | 16/fs | 8/fs | ||
1 | 1 | RFU | RFU |
(Измененная редакция, Изм. A2).
Минимальное TR1 требуется PCD для синхронизации с PICC, и его значение зависит от быстродействия PCD.
PCD, устанавливающее (b6, b5) = (11)b, не соответствует требованиям настоящего стандарта. До тех пор, пока RFU-значение (11)b не назначено ИСО/МЭК, PICC, принимающая (b6, b5) = (11)b, должна интерпретировать его как (b6, b5) = (00)b, т.е. значение по умолчанию.
7.10.3.3 EOF/SOF
Биты b3 и b4 указывают на способность PCD поддерживать подавление EOF и/или SOF от PICC к PCD, что может уменьшить потери пропускной способности передачи. Подавление EOF и/или SOF является необязательным для PICC.
Кодирование b3 и b4 указано в таблицах 32 и 33.
Таблица 32 - Обработка SOF
b3 | SOF необходим |
0 | Да |
1 | Нет |
Таблица 33 - Обработка EOF
b4 | EOF необходим |
0 | Да |
1 | Нет |
Подавление SOF/EOF применяется только для передачи при скорости fc/128 (~106 кбит/с). При скоростях передачи свыше fc/128 (~106 кбит/с) и до fc/16 (~848 кбит/с) PICC должна всегда обеспечивать SOF и EOF. |
(Измененная редакция, Изм. А.2).
7.10.4 Кодирование Param 2
Младший значащий полубайт (биты от b4 до b1) используется для кодирования максимального размера кадра, который может быть получен PCD, как указано в таблице 34.
Таблица 34 - Кодирование бит от b4 до b1 в Param 2 | ||||||||||||||||
Код максимального размера кадра в ATTRIB | '0' | '1' | '2' | '3' | '4' | '5' | '6' | '7' | '8' | '9' | 'А' | 'В' | 'С' | 'D'-'F' | ||
Максимальный размер кадра (байт) | 16 | 24 | 32 | 40 | 48 | 64 | 96 | 128 | 256 | 512 | 1024 | 2048 | 4096 | RFU |
(Измененная редакция, Изм. А2).
Старший значащий полубайт (биты от b8 до b5) используется для выбора скорости передачи в соответствии с таблицами 35 и 36.
Таблица 35 - Кодирование b6 и b5 в Param 2
b6 | b5 | Значение |
0 | 0 | От PCD к PICC - 1 etu = 128/fc, скорость передачи fc/128 (~106 кбит/с) |
0 | 1 | От PCD к PICC - 1 etu = 64/fc, скорость передачи fc/64 (~2012 кбит/с) |
1 | 0 | От PCD к PICC - 1 etu = 32/fc, скорость передачи fc/32 (~424 кбит/с) |
1 | 1 | От PCD к PICC - 1 etu = 16/fc, скорость передачи fc/16 (~848 кбит/с) |
Таблица 36 - Кодирование b7 и b8 в Param 2
b8 | b7 | Значение |
0 | 0 | От PICC к PCD - 1 etu = 128/fc, скорость передачи fc/128 (~106 кбит/с) |
0 | 1 | От PICC к PCD - 1 etu = 64/fc, скорость передачи fc/64 (~2012 кбит/с) |
1 | 0 | От PICC к PCD - 1 etu = 32/fc, скорость передачи fc/32 (~424 кбит/с) |
1 | 1 | От PICC к PCD - 1 etu = 16/fc, скорость передачи fc/16 (~848 кбит/с) |
Примечание - S(PARAMETERS) в соответствии с ИСО/МЭК 14443-4:2008/Amd.2 - это единственный способ согласовать скорости передачи свыше fc/16. S(PARAMETERS) может использоваться для согласования специфичной скорости передачи. |
(Измененная редакция, Изм. А2).
7.10.5 Кодирование Param 3
Младший значащий полубайт (биты от b4 до b1) используется для подтверждения типа протокола, как указано в таблице 26, и минимального TR2, как указано в таблице 27. Бит b4 является RFU и должен быть установлен на (0)b.
PICC должна игнорировать (b4 до b2), а интерпретация любых других полей всего кадра не должна измениться.
Старший значащий полубайт (биты от b8 до b5) установлен на (0000)b, все другие значения - RFU.
PCD, устанавливающее (биты от b8 до b4) <> (00000)b, не соответствует требованиям настоящего стандарта.
PICC должна игнорировать и не выдавать ответ на команду ATTRIB при битах (от b8 до b5) <> (0000)b.
7.10.6 Кодирование Param 4
Байт Param 4 состоит из двух частей:
- младший значащий полубайт (биты от b4 до b1) называется "идентификатор карты (CID)" и определяет логический номер адресуемой PICC в диапазоне от 0 до 14. Значение 15 является RFU. CID задается PCD и должен быть уникальным для каждой активной PICC. Если PICC не поддерживает CID, то значение кода (0000)b должно быть использовано;
- старший значащий полубайт (биты от b8 до b5) установлен на (0000)b, все другие значения являются RFU.
PCD, устанавливающее CID = 15, не соответствует требованиям настоящего стандарта.
PICC должна игнорировать и не выдавать ответ на команду ATTRIB, если полученное значение CID = 15, так как любое действие в PICC для CID = 15 может быть определено только в будущем ИСО/МЭК.
PCD, устанавливающее (биты от b8 до b5) <> (0000)b, не соответствует требованиям настоящего стандарта.
PICC должна игнорировать (биты от b8 до b5), а интерпретация любых других полей во всем кадре должна измениться.
7.10.7 INF верхнего уровня
INF верхнего уровня может включать любые данные. PICC не нужно обрабатывать эти данные.
PICC, обрабатывающая команду ATTRIB, не должна изменяться путем включения этих данных.
7.11 Ответ на команду ATTRIB
PICC должна дать ответ на любые допустимые команды ATTRIB (правильный PUPI и допустимый CRC_B) в формате, приведенном на рисунке 29.
Рисунок 29 - Формат ответа на команду ATTRIB

Рисунок 29 - Формат ответа на команду ATTRIB
Первый байт состоит из двух частей:
- младший значащий полубайт (биты от b4 до b1) содержит выбранный CID. Если PICC не поддерживает CID, то значение кода (0000)b возвращается;
- старший значащий полубайт (биты от b8 до b5) называется коэффициентом максимальной длины буфера (MBLI). Он используется PICC, чтобы PCD могло знать предел своего внутреннего буфера для получения сцепленных кадров. Кодирование MBLI выглядит следующим образом:
- MBLI = 0 означает, что PICC не дает никакой информации о своем размере внутреннего входного буфера;
- MBLI > 0 используется для расчета фактической внутренней максимальной длины буфера (MBL) по следующей формуле: MBL = (Максимальный размер кадра PICC)·2![]() , где максимальный размер кадра PICC возвращается PICC в свой ATQB. Когда он посылает сцепленные кадры в PICC, PCD должно обеспечить, чтобы суммарная длина не превышала MBL.
, где максимальный размер кадра PICC возвращается PICC в свой ATQB. Когда он посылает сцепленные кадры в PICC, PCD должно обеспечить, чтобы суммарная длина не превышала MBL.
Остальные байты являются необязательными и используются для ответа верхнего уровня.
Как показано на рисунке 30, PICC должна ответить пустой командой ATTRIB (нет INF верхнего уровня) с пустым ответом верхнего уровня:
Рисунок 30 - Ответ PICC на формат ATTRIB без ответа верхнего уровня
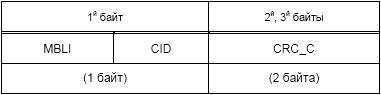
Рисунок 30 - Ответ PICC на формат ATTRIB без ответа верхнего уровня
Примечание - Допустимый ответ (тот же CID и допустимый CRC_B) на команду ATTRIB (как показано на рисунке 29 или 30) - это способ для PCD проверить, был ли выбор PICC успешным.
7.12 Команда HLTB и ответ
Команда HLTB используется для того, чтобы установить PICC в состояние HALT и остановить ответ на REQB.
После ответа на эту команду PICC должна игнорировать любые команды, кроме команды WUPB (см. 7.7).
Формат команды HLTB приведен на рисунке 31.
Рисунок 31 - Формат команды HLTB
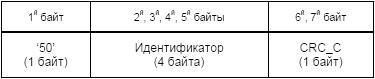
Рисунок 31 - Формат команды HLTB
Идентификатор, состоящий из 4 байт, представляет собой значение PUPI, посылаемое PICC в ATQB.
Формат ответа PICC на команду HLTB определен на рисунке 32.
Рисунок 32 - Формат ответа PICC на команду HLTB
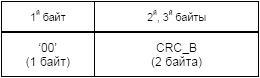
Рисунок 32 - Формат ответа PICC на команду HLTB
8 Обработка электромагнитной помехи
8.1 Общие положения
|
8.2 Временные ограничения для обработки EMD
|
Рисунок 33 - Время низкого уровня EMD
|
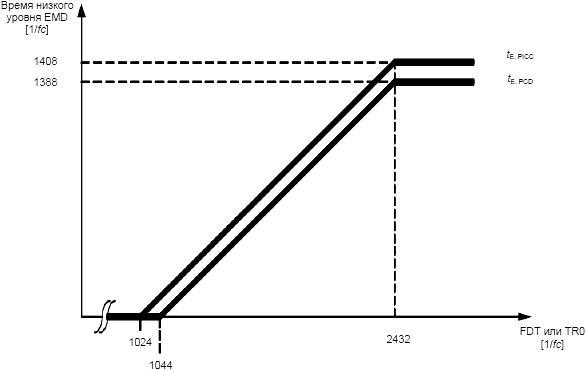
8.3 Рекомендации алгоритма PCD для обработки EMD
|
(Измененная редакция, Изм. А1:2011).
Приложение А (справочное). Пример передачи типа А
Приложение А
(справочное)
Данный пример показывает последовательность выбора при двух PICC в поле со следующими допущениями:
- PICC N 1: размер UID - одинарный, значение uid0 - '10';
- PICC N 2: размер UID - двойной.
Рисунок А.1 - Последовательность выбора с биткадровой антиколлизией
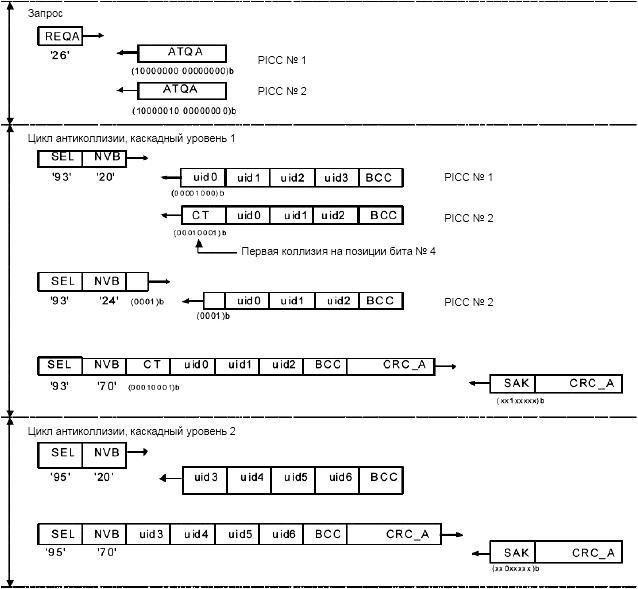
Примечание - Начало передачи, конец передачи и биты контроля четности не показаны.

Рисунок А.1 - Последовательность выбора с биткадровой антиколлизией
Пояснения к рисунку А.1:
Запрос | - PCD передает команду REQA; |
Цикл антиколлизии, каскадный уровень 1 | - PCD передает команду ANTICOLLISION: |
Цикл антиколлизии, каскадный уровень 2 | - PCD передает другую команду ANTICOLLISION: |
Приложение В (справочное). Кодирование CRC_A и CRC_B
Приложение В
(справочное)
В.1 Кодирование CRC_A
В настоящем приложении определены битовые комбинации, которые существуют в физическом слое. Целью данного приложения является проверка реализации кодирования CRC_A для типа А по ИСО/МЭК 14443-3.
Процесс кодирования и декодирования может быть выполнен в 16-этапном регистре циклического сдвига с соответствующими логическими элементами обратной связи. В соответствии с Рекомендацией ITU-T V.41 (Приложение I, рисунки I-1/V.41 I-2/V.41) триггеры в регистре должны быть пронумерованы от FF0 до FF15. FF0 - самый левый триггер, где данные переходят на нижний регистр, FF15 - самый правый триггер, где данные переходят на верхний регистр.
В таблице В.1 определено начальное содержание регистра.
Таблица В.1 - Начальное содержание 16-этапного регистра сдвига для значения '6363'.
FF0 | FF1 | FF2 | FF3 | FF4 | FF5 | FF6 | FF7 | FF8 | FF9 | FF10 | FF11 | FF12 | FF13 | FF14 | FF15 |
0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 |
FF0 соответствует MSB, a FF15 - LSB.
Ниже приведены примеры битовых комбинаций, которые будут переданы через стандартные кадры.
Пример 1 - Передача данных: первый байт ='00', второй байт ='00', CRC_A добавлен к записи.
Расчетный CRC_A ='1ЕА0'
Рисунок В.1 - Пример 1 для кодирования CRC_A

Рисунок В.1 - Пример 1 для кодирования CRC_A
Таблица В.2 - Содержание 16-этапного регистра сдвига для значения '1ЕА0'
FF0 | FF1 | FF2 | FF3 | FF4 | FF5 | FF6 | FF7 | FF8 | FF9 | FF10 | FF11 | FF12 | FF13 | FF14 | FF15 |
0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
Пример 2 - Передача блока данных: первый байт ='12', второй байт ='34', CRC_A добавлен к записи.
Расчетный CRC_A ='CF26'
Рисунок В.2 - Пример 2 для кодирования CRC_A

Рисунок В.2 - Пример 2 для кодирования CRC_A
Таблица В.3 - Содержание 16-этапного регистра сдвига для значения 'CF26'
FF0 | FF1 | FF2 | FF3 | FF4 | FF5 | FF6 | FF7 | FF8 | FF9 | FF10 | FF11 | FF12 | FF13 | FF14 | FF15 |
1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 |
В.2 Кодирование CRC_B
В настоящем приложении определены битовые комбинации, которые существуют в физическом слое. Целью данного приложения является проверка реализации кодирования CRC_B для типа В по ИСО/МЭК 14443-3. Более подробная информация приведена в ИСО/МЭК 13239 и ITU-T Х.25 N 2.2.7 и N V.42 8.1.1.6.1.
Начальное значение ='FFFF'.
Ниже приведены примеры битовых комбинаций, которые будут переданы через стандартные кадры.
Пример 1 - Передача: первый байт ='00', второй байт ='00', третий байт ='00', CRC_B добавлен к записи. Расчетный CRC_B ='С6СС'
Рисунок В.3 - Пример 1 для кодирования CRC_B

Рисунок В.3 - Пример 1 для кодирования CRC_B
Пример 2 - Передача: первый байт ='0F', второй байт ='АА', третий байт ='FF', CRC_B добавлен к записи. Расчетный CRC_B ='D1FC'.
Рисунок В.4 - Пример 2 для кодирования CRC_B

Рисунок В.4 - Пример 2 для кодирования CRC_B
Пример 3 - Передача: первый байт ='0А', второй байт ='12', третий байт ='34', четвертый байт ='56', CRC_B добавлен к записи. Расчетный CRC_B ='F62C'
Рисунок В.5 - Пример 3 для кодирования CRC_B

Рисунок В.5 - Пример 3 для кодирования CRC_B
В.3 Пример кода, написанного на языке С для вычисления CRC
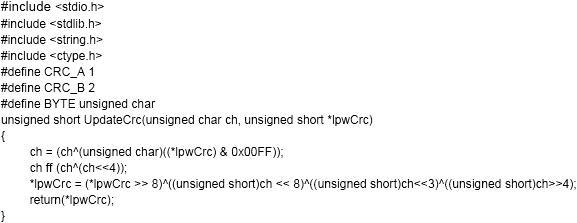
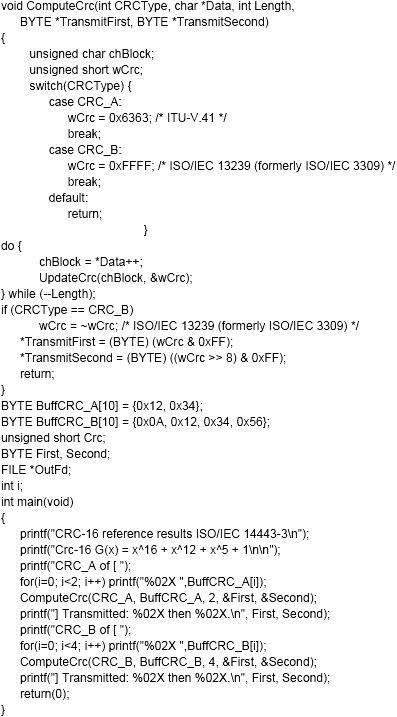
Приложение С (справочное). Таймслот типа А - инициализации и антиколлизия
Приложение С
(справочное)
В настоящем приложении описывается последовательность антиколлизии на основе таймслотов, применимая для PICC типа A. PCD, поддерживающее процедуры опроса и для типа А, и для типа В, не обязательны* должны поддерживать эту последовательность как обязательную последовательность антиколлизии, как описано в разделе 5.
_______________
* Текст документа соответствует оригиналу. - .
С.1. Обозначения и сокращения
В настоящем приложении применены следующие обозначения и сокращения:
ATQA_t - Ответ на Запрос (Answer То reQuest) для Type А_timeslot;
ATQ-ID - Ответ на REQ-ID (Answer То REQ-ID);
CID_t - идентификатор карты для Type А_timeslot;
HLTA_t - команда HLTA для Type А_ timeslot;
REQA_t - команда REQuest для Type А_ timeslot;
REQ-ID - команда REQuest-ID;
SAK_t - подтверждение выбора (Select AKnowledge) для Type A_timeslot;
SEL_t - команда SELect для Type A_timeslot.
C.2 Синхронизация и формат кадра
С.2.1 Определения, используемые при синхронизации
Время сброса опроса
Время сброса опроса для Type А_timeslot равно времени опроса типа А в разделе 5.
Временной интервал от REQA_t до ATQA_t
PICC возвращает ATQA_t после ожидания в течение 32±2 etu после получения REQA_t. PCD может не распознать кодирование ATQA_t.
Разграничительный интервал запроса
Разграничительный интервал запроса определяется как минимальное время между началом бит двух последовательных команд запроса Request и должен иметь значение 0,5 мс.
Разграничительный интервал кадра
Разграничительный интервал кадра определяется как минимальное время между нарастающим фронтом последнего бита и задним фронтом стартового бита двух последовательных кадров в противоположном направлении и должен иметь значение 10 etu.
Длина таймслота
Первый таймслот начинается через 32 etu после REQ-ID. Длина каждого таймслота - 104 etu (94 etu - для приема ATQ-ID и 10 etu - для следующего разграничительного интервала кадра).
С.2.2 Форматы кадров
Кадр REQA_t
См. 6.2.3.1 и таблицу 3. Содержание данных - '35' для REQA_t.
Стандартный кадр
LSB каждого байта передается первым. Байты не имеют четности. CRC_B определен в 7.2.
S | Данные: n·(8 бит данных + нет бита четности) | CRC_B 2 байта | Е | |||
1 байт | (0 или 1 байт) (параметр 1) | (0 или 1 байт) (параметр 2) | (0 или 8 байт) (UID) |
С.3 Состояния PICC
В следующих подразделах определены состояния для PICC, Type A_timeslot.
Состояние POWER-OFF
В состоянии POWER-OFF на PICC не подается питание из-за отсутствия несущей. PICC не должна генерировать поднесущую.
Состояние IDLE
Вход в данное состояние происходит после того, как поле активно в течение 5 мс задержки. PICC распознает REQA_t.
Состояние READY
Вход в состояние READY осуществляется с помощью REQA_t. PICC распознает REQA_t, REQ- ID и SEL_t.
Состояние ACTIVE
Данное состояние имеет два подсостояния. Вход в первое подсостояние осуществляется с помощью SEL_t с его полным UID и CID_t. В этом подсостояни PICC распознает HLTA_t и проприетарные команды верхнего уровня. Второе подсостояние определено в ИСО/МЭК 14443-4. Вход в него начинается из первого подсостояния с помощью команды, определенной в ИСО/МЭК 14443-4.
Состояние HALT
Вход в это состояние осуществляется с помощью HLTA_t из состояния ACTIVE. В этом состоянии PICC находится в состоянии молчания.
С.4 Набор команда/ответ
Используют четыре набора команда/ответа.
Тип | Наименование | Кодирование (b8-b1) | Значение |
Команда | REQA_t | (b7-b1) | Запрос на таймслот типа A PICC для ответа ATQA_t |
Ответ | ATQA_t | Любое однобитовое содержание от '00' до 'FF' | Ответ на REQ_t. PCD может распознать наличие Type A timeslot PICC. Однако PCD не требуется распознавать кодирование ATQA_t |
Команда | REQ-ID | (00001000)b (='08') | Запрос PICC на ответ своего UID для одного из таймслотов. За REQ-ID следуют два параметра. |
Ответ | ATQ-ID | (00000110)b (='06') | Ответ 8-байтовым UID на один из 4 таймслотов. За ATQ-ID следует его 8-байтовый UID |
Команда | SEL_t | (01000NNN)b, (NNN=CID_t N (0-7)) | Выбор PICC с ее UID и установление CID_t. |
Ответ | SAK_t | b8-b5 (1000)b: Дополнительная информация доступна в протоколах | Подтверждение SEL_t |
Команда | HLTA_t | (00011NNN)b, (NNN=CID_t N (0-7)) | Останов PICC с ее CID_t |
Ответ | Ответ на HLTA_t | (00000110)b (='06') | Подтверждение HLTA_t |
Параметры команды REQ-ID
Параметры | Значение | |
Р1 | b8-b7 | Длина таймслота, b7 = (1)b: для 8-байтового UID, b8 = (0)b |
b6-b1 | Число таймслотов, b3 = (1)b: для 4 таймслотов, остальные = (0)b | |
Р2 | '00' |
С.5 Последовательности антиколлизии таймслота
Блок-схема последовательности антиколлизии PICC показана на рисунке С.1
Рисунок С.1 - Блок-схема последовательности антиколлизии PICC
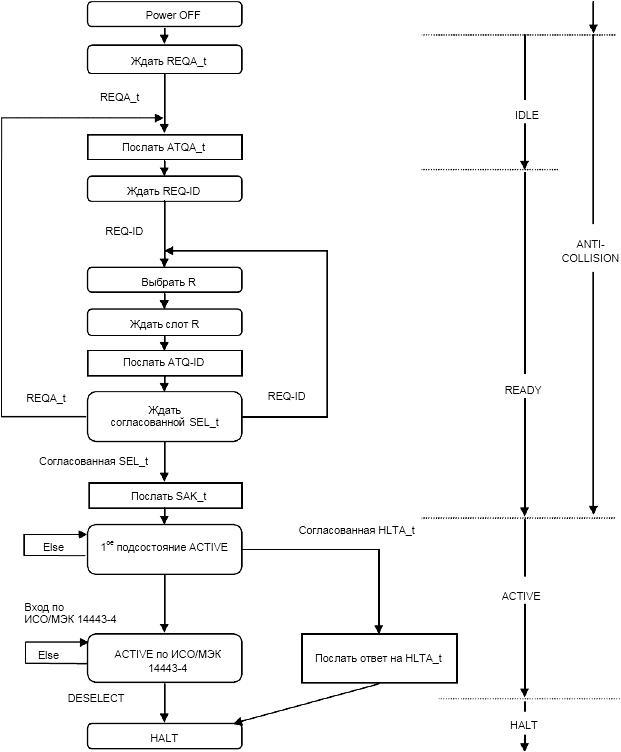
Рисунок С.1 - Блок-схема последовательности антиколлизии PICC
Приложение D (справочное). Пример последовательности антиколлизии типа В
Приложение D
(справочное)
Примечание - Антиколлизия типа В представляет собой гибкий набор команд, позволяющий разрабатывать алгоритм антиколлизии для приложения.
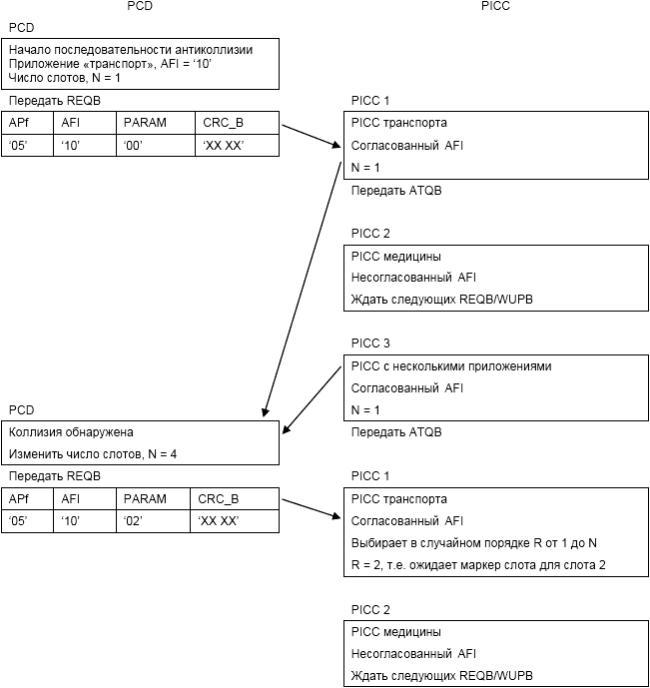
Продолжение
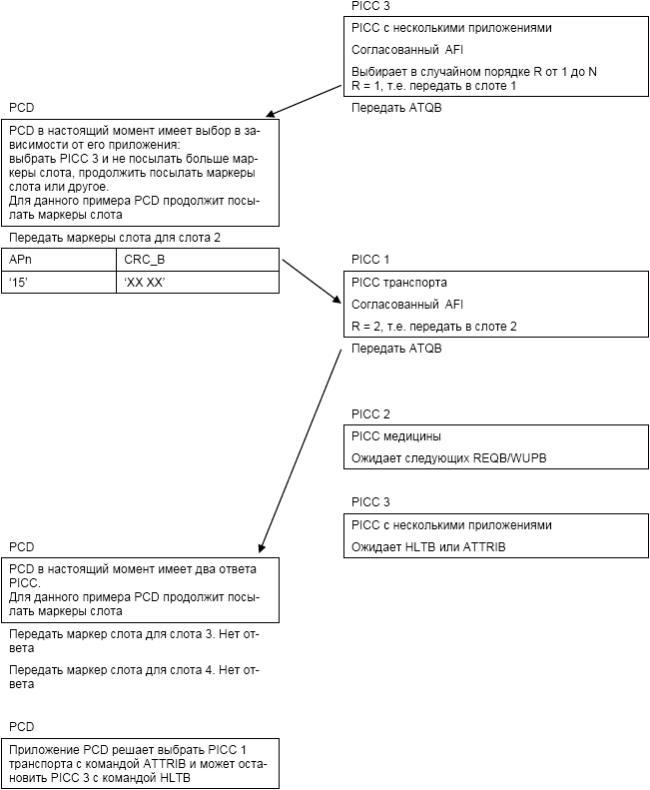
Приложение Е (обязательное). Скорости передачи от PCD к PICC
Приложение Е | |||
Скорости передачи 3 | |||
Е.1 Etu | |||
Скорость передачи | etu | ||
3 | 4/ | ||
| 4/ | ||
3 | 2/ | ||
2 | 2/ | ||
Е.2 Формат и синхронизация кадра |
_______________
* Изменение А5 к ИСО/МЭК 14443-2:2010 не было опубликовано.
Приложение E (Введено дополнительно, Изм. N 1).
Приложение ДА (справочное). Сведения о соответствии ссылочных международных стандартов национальным стандартам Российской Федерации
Приложение ДА
(справочное)
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ИСО/МЭК 13239* | - | ГОСТ Р ИСО/МЭК 3309-98 "Информационная технология. Передача данных и обмен информацией между системами. Процедуры управления звеном данных верхнего уровня. Структура кадра" |
- | ГОСТ Р ИСО/МЭК 7809-98 "Информационная технология. Передача данных и обмен информацией между системами. Процедуры управления звеном данных верхнего уровня. Классы процедур" | |
- | ГОСТ Р ИСО/МЭК 8885-98 "Информационная технология. Передача данных и обмен информацией между системами. Процедуры управления звеном данных верхнего уровня. Содержимое и формат поля информации кадра "идентификация станции" общего назначения" | |
ИСО/МЭК 7816-4:2005 | IDT | ГОСТ Р ИСО/МЭК 7816-4-2013 "Карты идентификационные. Карты на интегральных схемах. Часть 4. Организация, защита и команды для обмена" |
ИСО/МЭК 7816-6 | IDT | ГОСТ Р ИСО/МЭК 7816-6-2013 "Карты идентификационные. Карты на интегральных схемах. Часть 6. Межотраслевые элементы данных для обмена" |
ИСО/МЭК 14443-2 | IDT | ГОСТ Р ИСО/МЭК 14443-2-2014 "Карты идентификационные. Карты на интегральных схемах бесконтактные. Карты близкого действия. Часть 2. Радиочастотный энергетический и сигнальный интерфейс" |
ИСО/МЭК 14443-4 | IDT | ГОСТ Р ИСО/МЭК 14443-4-2014 "Карты идентификационные. Карты на интегральных схемах бесконтактные. Карты близкого действия. Часть 4. Протокол передачи" |
* - ИСО/МЭК 13239 является пересмотром ИСО/МЭК 3309, ИСО/МЭК 7809, ИСО/МЭК 8885 |
Библиография
[1] | ISO/IEC 7810, Identification cards - Physical characteristics |
[2] | ISO/IEC 10373-6, Identification cards - Test methods - Part 6: Proximity cards |
[3] | ISO/IEC 10536-1 (all parts), Identification cards - Contactless integrated circuit(s) cards |
[4] | ISO/IEC 15693 (all parts), Identification cards - Contactless integrated circuit cards - Vicinity cards |
[5] | ITU V.41, Code-independent error control system |
[6] | ITU V.42, Error-correcting procedures for DCEs using asynchronous-to-synchronous conversion |
[7] | ITU X.25, Interface between Data Terminal Equipment (DTE) and Data Circuit-terminating Equipment (DCE) for terminals operating in the packet mode and connected to public data networks by dedicated circuit |
УДК 336.77:002:006.354 | ОКС 35.240.15 | Э46 | ОКП 40 8470 |
Ключевые слова: обработка данных, обмен информацией, идентификационные карты, IC-карты, карты близкого действия, технические требования, инициализация, антиколлизия |
Электронный текст документа
и сверен по:
официальное издание
М.: Стандартинформ, 2015
Редакция документа с учетом
изменений и дополнений подготовлена
{kind=link}